女子排球运动员拦网动作下肢骨骼肌肉模型构建与验证
2017-09-23 07:48苟明
中国体育科技 2017年5期
苟 明
GOU Ming
女子排球运动员拦网动作下肢骨骼肌肉模型构建与验证
苟 明
GOU Ming
目的:模拟排球拦网起跳的下肢肌肉动作,建立排球拦网动作骨骼肌肉模型,并以表面肌电验证所建立的肌肉骨骼模型。方法:采用 3名优秀女子排球运动员为受试者。9台Vicon Mcam2 光学摄影机 (250 Hz) 、2 块三维测力板 (1000 Hz) 和表面肌电同步撷取数据,以Matlab 和 Anybody 软件进行数据处理,并以动力学逆过程算得下肢内在动力学参数。 结果:1) 排球拦网起跳动作主要作用肌群为股外侧肌、股内侧肌、股直肌、胫前肌和腓肠肌群;2)起跳动作右脚髋关节最大力矩约121.7 N·m,左脚髋关节最大值力矩约83.5 N·m;右脚膝关节最大值力矩约107.9 N·m,左脚膝关节最大值力矩约103.4 N·m;右脚踝关节最大值力矩约78.9 N·m,左脚踝关节最大值力矩约65.6 N·m;3)表面肌电与模拟数值趋势相同的有股二头肌、股内侧肌、股外侧肌、股直肌、腓肠肌外侧头、腓肠肌内侧头,趋势不相同的有半腱肌、半膜肌、胫骨前肌。 结论:使用运动学数据驱动肌肉骨骼模型,发现预测值与表面肌电的讯号有密切关系,并验证所建立的骨骼肌肉模型符合实际动作肌肉活化情况。
排球;拦网;肌肉模型;表面肌电
排球运动中约60%的肌肉骨骼受伤发生在跳跃扣球或拦网的着地动作[1]。研究显示,女性排球运动员发生膝关节外翻造成前十字韧带受伤机率是男性的3.3倍[9],因此,女性运动员在跳跃和着地时所造成的运动伤害的预防应该得到重视。Thelen认为,预防运动中特定动作的意外伤害,应该通过生物力学分析,建立动作时肌肉模型,仿真下肢肌肉活化情况,并以表面肌电验证所建立肌肉模型,进而强化主要作用的肌肉,提高有效动作训练,从而预防损伤。目前,关于人体如何招募肌肉做为特定动作所需要的肌群尚无定论。但这个问题可以通过三维度的肌肉骨骼模拟得知。肌肉骨骼模型可以运用在评估个别肌肉在人体各种动作上的表现[10]。使用逆运动学 (Inverse Kinematics) 和逆动力学 (Inverse Dynamics)分别可以得知关节的角度和关节的受力情况,也可计算肌肉控制(Computed Muscle Control) ,以找寻出使用最小的肌肉收缩和肌肉力量的代谢消耗达到最有效的动作过程[11]。正向动力学 (Forward Dynamics),是给予肢段动作而模拟出肌肉活化情况的研究,其特别之处在于所得到的肌肉活化数值是在未测量表面肌电之下所得到的[3]。过去很少有研究使用9条肌电完整记录排球拦网的动作,而本研究所模拟的骨骼肌肉模型在训练的评估上十分重要,可以有效提供训练上的需要,故本研究除了模拟排球拦网的下肢肌肉动作,也验证骨骼肌肉模型。综上所述,本研究使用动作捕捉系统获得运动学数据,使用表面肌电收集腿后肌群 (Hamstring)、股四头肌群 (Quadriceps)、腓肠肌群(Gastrocnemius)及胫骨前肌 (Tibialis anterior)数据,比较肌电数据和仿真出来的肌肉讯号之间的差异,并验证所模拟出来的肌肉讯号趋势是否正确,了解排球选手在原地起跳动作时的肌肉时序,提高对拦网起跳动作的了解。验证模型的正确性后,在未来训练中使用正向动力学,可预防伤害的发生,并提供更有效的训练。
1 研究对象与方法
1.1 研究对象
本研究以3名国家健将级女子排球运动员为研究对象(年龄:21.1±0.91岁,体重:67.1±3.1 kg,身高:181±2.7cm)。受试者于实验前 6 个月内并无任何下肢损伤,每周至少接受4次、每次维持 2 h以上的规律的专业训练。在实验之前,受试者已阅读受试者须知,了解本实验的内容、流程与注意事项并签署受试者同意书,同意参与本实验。
1.2 研究方法
1.2.1 运动学参数测试
运动学摄影系统装配9台美国产Mcam2,Vicon MX,Oxford Metrics数字镜头,采样频率250 Hz。实验前先进行静态与动态空间坐标校正,30 个直径 14 mm 大小的反光球被黏贴在身体的各肢段,包含骨盆(髂前上棘 ,髂后上棘 、大腿(大转子、大腿外侧、股骨外髁、股骨内髁)、小腿(腓骨小头、胫骨粗隆 、外上踝 、内上踝和足后跟、舟状骨粗隆、第1跖骨粗隆 、第2跖骨粗隆和第5跖骨粗隆)。
1.2.2 动力学参数测试
采用两块JP 6060多维测力平台用于监测受试者脚对地面的三维力变化情况。测力台采用埋入式安装,其表面与跑道基本保持在同一水平面上,数据采样频率为1 000 Hz。
1.2.3 肌电(EMG)参数测试
国产JE-TB1010A 10通道无线表面肌电仪系于受试者腰带上,用于监测正着走与退着走过程中下肢主要肌群的肌电变化。受试者统一测右腿,监测股直肌、股二头肌、股内肌、股外肌、半腱肌、半膜肌、胫骨前肌、内侧腓肠肌、外侧腓肠肌。
1.2.4 无线同步启动装置
同步装置是由连接多维测力平台的触发模块的无线同步器和无线连接表面肌电仪的无线同步器以及发光二极管组成。主试者触发同步遥控器、多维测力台和表面肌电仪同时启动采集数据,二极管发光使摄像机与多维测力台和表面肌电仪同步。最后光点轨迹、表面肌电和地面反作用力讯号收集在VICON 624 Datastation。
1.3 实验程序
本研究分为两个部分:1)分析受试者 12次深蹲跳运动学、动力学与肌电活化的表现,确定 12次的肌电讯号趋势是一样的;2)模拟分析排球拦网起跳动作,包含逆动力学、肌肉模拟控制和正向动力学。受试者是长期接受训练的女性排球运动员。首先两脚分别进入测力板内,模拟拦网的跳跃动作,听闻跳跃口令后,全力往上跳,收集 12 次跳跃资料作为下肢肌电分析比较。确认 12 次跳跃无差异之后,取一次实验数据进行肌肉仿真。
1.4 实验数据处理
利用MATLAB 7.0 撰写程序进行数据处理及汇入Anybody进行肌肉模拟。
1.4.1 仿真流程:运动学分析
取得反光球位置后先以 Butterworth 低频滤波器(4thorder Butterworthlow-pass fi lter) 过滤噪声,截止频率 (Cut-off Frequency) 为 10 Hz。并使用静态运动学数据相对于动态各肢段运动学数据进行优化修匀处理,使用尤拉参数计算出肢段关节角度[13]。
1.4.2 仿真流程:逆动力学分析
将 Matlab 7.0 程序软件修匀后数据使用 AnyBody Modeling System (AMS) Software (AnyBody Technology A/S,Aalborg,Denmark) Version 3.40分析,使用 gaitapplication 2程序非线性和非凸性 优化方法,解决过度决定运动学方程式的问题。此最佳化方法同时可用来优化骨骼肌肉大小、局部反光球坐标和动态模型数据,使骨骼肌肉模型和量测到轨迹的位置误差达到最小[4-6]。
1.4.3 建立骨骼肌肉模型
人体骨骼肌肉数据使用 Gaitunimiami作为人体模型[2],运动学数据和测力板数据经过 gaitapplication 2 优化后输入 Anybody Modeling 软件作为排球拦网起跳动作的肌肉模拟。此模型输入受试者人体参数,并调整成实际拍摄大小,利用优化的方式使测量到的各肢段局部坐标系与肌肉模型动作中的误差减为最小,这种方法优化了骨骼肌肉模型。本研究使用20 颗反光球标记作为骨骼肌肉模型驱动,一个肢段至少标记3个反光球作为轨迹优化输入参数,髋关节被建模为1个球形关节,自由度为 6;膝关节建模为旋转关节 (Revolute Joint) 自由度为 6;踝关节建模为万向关节,运动学及动力学计算所需反光球为 30 颗[1]。
1.4.4 仿真流程:计算肌肉活化和正向动力学
本研究肌肉骨骼模型根据受试者身高决定,每只脚包含了 27 条肌肉的起始点、终点和肌肉模型。仿真时使用逆动力学,从运动学的数据得到肌肉的力量,肌肉活化模拟是利用肌肉最大化和肌肉最小化(Max/Min Criterion)进行肌肉力量标准化[6],利用摄影系统拍摄好的反光球运动学数据,使用优化的方法驱动肌肉骨骼模型。表面肌电数据可用来支持利用逆动力学所计算出的关节力矩,却没办法评估个别肌肉的力量。大部分骨骼肌肉系统仿真后的肌肉活化特征,都是和表面肌电讯号作比较,肌肉力量不能被直接测量,但是可以通过获得的表面肌电特征来得到活化情况以作为推估。过去的研究搜集肌电讯号往往受限于研究动作,不能确切了解完整跳跃起跳动作时肌肉活化情况,故本研究使用9条肌电讯号收集单侧下肢肌肉讯号。
1.4.5 肌电讯号和肌肉仿真比较
肌电讯号处理采用 Butterworth 低频滤波器过滤噪声,截止频率为 9 Hz,作为线性包络线讯号 ,观察肌肉施力情况,最后除上3 s的最大自主收缩作为肌电讯号标准化,肌肉仿真讯号采用该次最大讯号作为标准化,再做肌肉活化趋势比较。
1.5 数理统计分析
首先确定 12 次跳跃肌电讯号趋势一致。统计上使用时间序列 ARIMA 模式的适合度量数,以正规化BIC(Bayesian)评估肌电讯号和下肢肌肉仿真讯号趋势是否一致,本研究定义时间序列ARIMA正规化BIC。
结果 STDEV<1 为相同动作。确定9条肌电讯号趋势一致后,随机取1条测验资料用作逆运动学及动力学分析,观察惯用脚右脚腿后肌群、股四头肌群、腓肠肌群和胫骨前肌肌肉活化的情况,使用时间序列的适合度量数参数正规化 BIC 评估肌电讯号和下肢肌肉仿真讯号趋势是否一致。本研究定义正规化 BIC 差值超过 1 为趋势不同,差值在 1以内定义为趋势相同。
2 研究结果
2.1 运动学、动力学结果
如图1所示,1)拦网起跳动作前右脚髋关节最大角度约为84.44°,左脚髋关节最大角度约为82.56°,髋关节于跳跃启动后到离地前先出现约为 30°的屈曲,右脚髋关节力矩最大值为119.5N·m,左脚髋关节力矩最大值为80.5N·m。2)起跳动作前膝关节角度约为60°,跳跃启动后到离地前出现约为2°的屈曲,右脚膝关节最大值力矩约101.1N·m,左脚膝关节最大值力矩约106.4N·m。3)起跳动作踝关节角度约为 40°,跳跃启动后到离地前跖屈角度约为 60° ,右脚踝关节最大值力矩约76.1N·m,左脚踝关节最大值力矩约67.3N·m。
2.2 肌肉仿真结果与肌电讯号
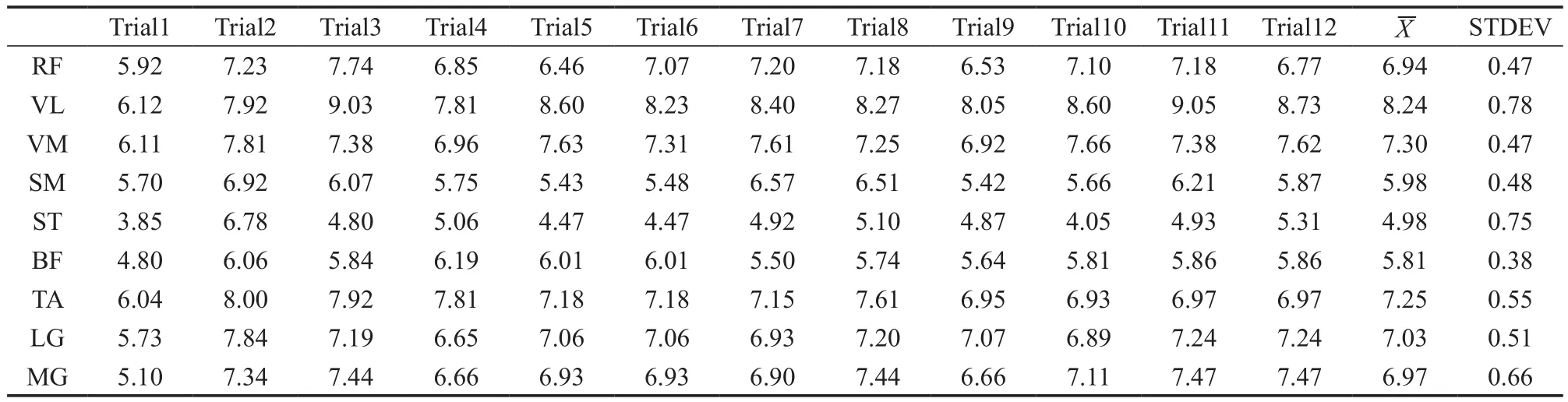
表1 12 次表面肌电时间序列 ARIMA 正规化 BIC 结果Table 1 12 Times the Surface EMG Time Sequence ARIMA Normalized BIC Results
如表1、表2所示,本研究先取 12 次肌电讯号,发现 12次肌电讯号结果一致。Act 表示肌肉模拟经由时间序列ARIMA 模式的适合度量数正规化 BIC 分析,股直肌平均值 6.94、股外侧肌平均值 8.24、股内侧肌平均值7.30、股二头肌平均值 5.98、半腱肌平均值 4.98、半膜肌平均值 5.81、胫骨前肌平均值 7.25、腓肠肌外侧头平均值 7.03 和腓肠肌内侧头平均值 6.97。12 次正规化 BIC 结果 STDEV 皆<1,显示 12 次跳跃肌电图为相同动作。故本研究取一次实验资料来仿真排球拦网下肢肌肉活化情况,观察股直肌表面肌电与股直肌肌肉模拟比较图,可以发现趋势是一样的。股直肌标准化 BIC 数值也是相近的 (EMG=2.97,Act=3.00)。
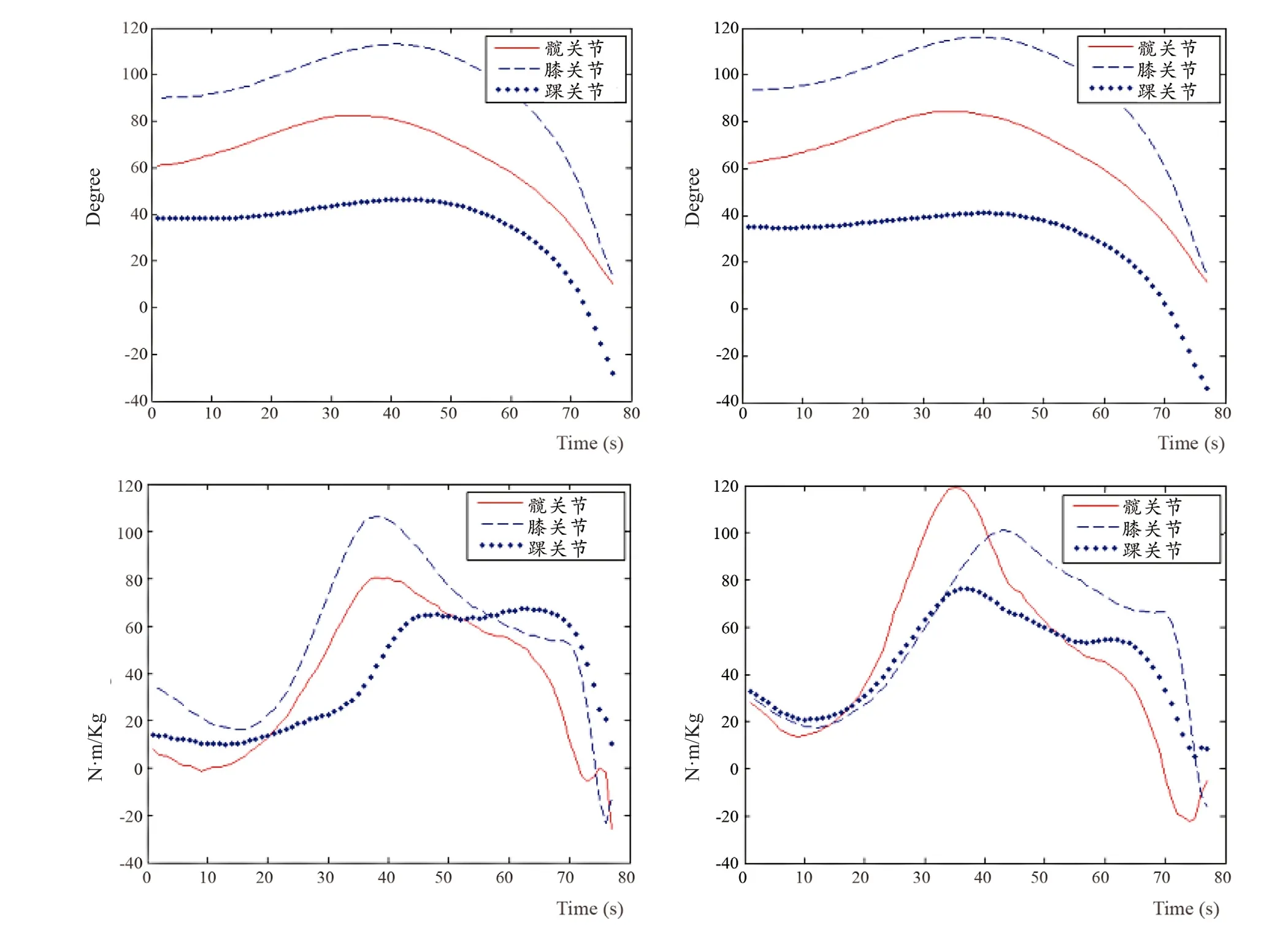
图1 起跳期下肢关节矢状面“角度-时间”曲线及“力矩-时间”曲线图Figure 1. Angle of the Lower Limb Joint-Time Curve and Moment-Time Curve in Sagittal Plane

表2 表面肌电与肌肉模拟时间序列 ARIMA 平稳型R2与标准化 BIC 结果Table 2 Comparison of Surface Electromyography and Muscle Simulation Time Series ARIMA Smooth R Squared with Normalized BIC Results
股外侧肌表面肌电与股外侧肌肌肉模拟比较图发现趋势相同 (EMG=3.27,Act=2.63)。股外侧肌表面肌电着地的数值比着地模拟数值大,有可能是由于模拟数值将力量分散给其他肌肉。
股内侧肌表面肌电与股内侧肌肌肉模拟比较图发现趋势相同 (标准化 BIC 差<1),股内侧肌标准化 BIC数值相近 (EMG=2.76,Act=2.63) 。
半膜肌表面肌电与半膜肌肌肉模拟比较图发现趋势不同。半膜肌模拟数值在起跳动作时不稳定,着地期趋势也不稳定,标准化 BIC 数值也是不同的 (EMG=3.30,Act=2.81)。
半腱肌表面肌电与半腱肌肌肉模拟比较图发现趋势不同,半腱肌模拟出来的数值是稳定的动作趋势,而实际量测表面肌电发现,跳跃时肌肉呈现不稳定状态,比较半腱肌标准化 BIC 数值也是不同的 (EMG=3.52,Act=4.22)。
股二头肌表面肌电与股二头肌肌肉模拟比较图发现趋势相同,但股二头肌模拟数值较股二头肌表面肌电早活化的趋势,造成标准化 BIC 数值差异 (EMG=4.49,Act=3.51)。
胫骨前肌表面肌电与胫骨前肌肌肉模拟比较图发现趋势不同 (标准化 BIC 差>1),实际量测表面肌电可以发现,跳跃和着地时胫骨前肌都呈现不稳定的数值,可能是由于维持身体平衡和起跳动作需用力而产生的现象,导致胫骨前肌标准化 BIC 数值也不同(EMG=2.97,Act=4.40)。
腓肠肌内、外侧头表面肌电与腓肠肌肌肉模拟比较图发现趋势是一样的。腓肠肌外侧头与腓肠肌内侧头表面肌电数值趋势几乎相同,腓肠肌模拟数值较表面肌电早活化,其标准化 BIC 数值也是相近的(腓肠肌外侧头 EMG=3.44,腓肠肌内侧头EMG=3.70,腓肠肌群Act=3.53)。
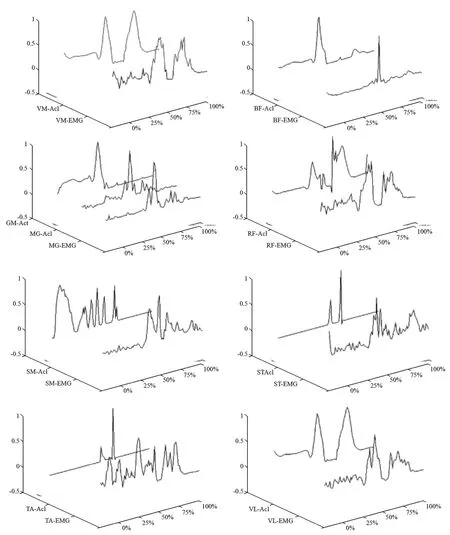
图2 下肢肌肉模拟与表面肌动作全期比较图Figure 2. Comparison of Lower Limb Muscle Simulation and Surface Motion (MVC%) for the Whole (Time,Normalised%)
综上所述,表面肌电与模拟数值趋势相同的有股二头肌、股内侧肌、股外侧肌、股直肌、腓肠肌外侧头和腓肠肌内侧头。趋势不相同的有半腱肌、半膜肌和胫骨前肌 。
3 讨论
本研究运动学数据使用优化的方法驱动肌肉骨骼模型,因此,将反光球所造成的皮肤位移降至最低,以排球拦网动作的肌电讯号验证 Gaitunimiami下肢肌肉模型。Kar 等[6]的研究也使用表面肌电来验证骨骼肌肉模型。表面肌电使用排球拦网主要动作肌群作为研究对象。经由运动学结果可以得知,左脚与右脚的结果相同,然而,动力学结果发现,下肢关节力矩不同,探究原因可能是所使用的测力板品牌不同造成的。而本研究力矩最大值也和Ridderikhoff等[9]的研究结果相似,在起跳前下肢关节力矩先些许降低,而后急速提升,然而,此动作为排球拦网动作,类似蹲踞跳 (Squat Jumps,SJ),起跳前就下蹲准备跳跃,故从运动学结果无明显伸张-收缩循环(Stretch-Shortening-Cycle,SSC)的动作特性。
肌肉仿真讯号与表面肌电相似的有股二头肌、股直肌、股外侧肌、股内侧肌、腓肠肌外侧头和腓肠肌内侧头,差异较大的有半腱肌、半膜肌和胫骨前肌[8]。从排球拦网起跳动作可发现,肌肉模拟数值与表面肌电数值有些微差异,观察股四头肌在起跳动作时的肌肉活化情况发现,股直肌模拟数值与表面肌电讯号肌肉活化的时间相同,但起跳动作时肌肉模拟数值较小。股外侧肌和股内侧肌模拟数值与表面肌电讯号趋势相同,但表面肌电活化的时序较慢,推测股四头肌肌肉模拟数值在起跳动作时,肌肉活化的趋势由股直肌活化分散至股外侧肌和股内侧肌。所以,股二头肌、股外侧肌和股内侧肌活化的时序较肌肉模拟数值慢,相对的表面肌电在股直肌的活化上较肌肉模拟数值高,在运动学相同动作下,表面肌电和肌肉模拟数值理应有一样的结果。然而,肌肉模拟股直肌起跳拦网动作时,活化数值较低,相对的提早了股二头肌、股外侧肌和股内侧肌肌肉活化的时间,但观察活化趋势都是相同的,半腱肌为了维持跳跃时身体的平衡模拟数值,而呈现不稳定的趋势,大腿肌群在起跳动作期间,表面肌电在也有明显的共同收缩。腓肠肌肌肉模拟数值和表面肌电趋势相同,表面肌电起跳动作时肌肉活化时间较模拟数值长,胫骨前肌表面肌电为维持身体平衡数值显得较不稳定。
Spagele等[14]的研究与本研究结果相同的有髂腰肌、股直肌、腓肠肌群、比目鱼肌和胫骨前肌的趋势,发现不相同的有臀大肌与股二头肌。Sasaki等[12]作双脚急跳 (Stop-Jumps) 动作收集双脚表面肌电并模拟下肢双脚肌肉活化情况,与本研究下肢排球拦网动作形态类似。模拟下肢肌肉活化趋势相同的有股二头肌、股直肌、腓肠肌群和股外侧肌。本研究模型为下肢 42 条肌肉,相较上述两篇研究下肢模型较为简单,本研究的肌肉力量可能分布于较多的肌肉群,因而研究结果有所差异。
实验上因无法直接量测到肌肉的力量,所以,采用测量表面肌电的方法去评估肌肉活化的情况,进一步将模拟出来的数值与表面肌电作比较,肌肉力量通常使用表面肌电图作为参考值,这个方法可以有效的评估动作中肌肉活化趋势,但实际上不能用来验证肌肉力量的大小,因此,直接在肌肉模型上建立人体参数和定义肌肉能负荷的肌肉力量成为肌肉模拟的趋势。肌肉模拟所需要的实验数据是影响仿真结果的重要关键,在计算关节角度和关节力矩上,错误的实验数据会改变仿真肌肉力量的幅度,特别是使用逆动力学 (Inverse Dynamics)和静态优化方法 (Static Optimization)[12]。故本研究使用优化的方法驱动肌肉骨骼模型,将静态数据最优化以推估整个动作过程。通过研究结果得知,排球拦网起跳动作主要作用肌群为股外侧肌、股内侧肌、股直肌、胫前肌和腓肠肌群,因此,未来须强化这些肌群的训练以利排球拦网跳跃动作的完成。
4 结论与建议
4.1 结论
排球运动员膝关节、踝关节等下肢损伤是运动中最常见的损伤,可缩短运动寿命,因而不容忽视。为确保优秀运动员在训练或比赛中减少下肢运动伤害,并确认实验资料的正确性而构建个别骨骼肌肉模型。本研究使用运动学数据驱动肌肉骨骼模型,发现预测值与表面肌电讯号有密切关系,并验证所建立的骨骼肌肉模型符合实际动作肌肉活化情况。使用表面肌电驱动膝关节骨骼肌肉模型可以预测膝关节力矩,排球拦网起跳动作主要作用肌群为股外侧肌、股内侧肌、股直肌、胫前肌和腓肠肌群,因此在训练上必须强化这些肌群以利于排球拦网跳跃动作的完成和减少运动损伤。
4.2 研究限制与建议
1.本研究模拟计算并未考虑到肌肉共同收缩的特性。共同收缩的肌电活化反应经常在下肢运动训练或康复训练文章中被讨论,在未来研究上须列入考虑。本研究所仿真出来的骨骼肌肉模型,未来在未黏贴表面肌电的情况下,可以用来预测受试者在做动作时肌肉活化的情况,也能测量到某些动作造成的关节受力过大,在运动伤害的预防上有很大的帮助。此外,还可针对特别肌群施以训练,为排球训练提供参考。
2.本研究仅应用3名国家健将组女子排球运动员进行模型构建,且没有考虑不同位置,但本研究提出一种利用表面肌电和测力板等进行肌肉模型构建的方法,可以推广到更多优秀运动员和不同项目中进行科技攻关与科技服务。
[1] AAGAARD H,JØRGENSEN U.Injuries in elite volleyball[J]. Scand J Med Sci Sports,1996,6(4):228-232.
[2] ANDERSON F C,PANDY M G. A dynamic optimization solution for vertical jumping in three dimensions[J]. Computer Methods Biomech Biomed Engineer,1999,2(3):201-231.
[3] ANDERSEN M S,DAMSGAARD M,RASMUSSEN J.Kinematic analysis of over-determinate biomechanical systems[J].Computer Methods Biomech Biomed Engineer,2009,12(4):371-384.
[4] ANDERSEN M S,DAMSGAARD M,MACWILLIAMS B,et al.A computationally efficient optimisation-based method for parameter identification of kinematically determinate and over-determinate biomechanical systems[J]. Computer Methods Biomech Biomed Engineer,2010,13(2):171-183.
[5] BERGMANN G,DEURETZBACHER G,HELLER M,et al. Hip contact forces and gait patterns from routine activities[J]. J Biomech,2001,34(7):859-871.
[6] KAR J,QUESADA P M. A musculoskeletal modeling approach for estimating anterior cruciate ligament strains and knee anterior-posterior shear forces in stop-jumps performed by young recreational female athletes[J].Ann Biomed Engineer,2013,41(2):338-348.
[7] KROSSHAUG T,SLAUTERBECK J R,ENGEBRETSEN L,et al.Biomechanical analysis of anterior cruciate ligament injury mechanisms:three-dimensional motion reconstruction from video sequences[J].Scand J Med Sci Sports,2007,17(5):508-519.
[8] LAUGHLIN W A,WEINHANDL J T,KERNOZEK T W,et al.The effects of single-leg landing technique on ACL loading[J]. J Biomech,2011,44(10):1845-1851.
[9] RIDDERIKHOFF A,BATELAAN J H,BOBBERT M F. Jumping for distance:Control of the external force in squat jumps[J]. Med Sci Sports Exerc,1999,31(8):1196-1204.
[10] THELEN D G,ANDERSON F C. Usingcomputed muscle control to generate forward dynamic simulations of human walking from experimental data[J]. J Biomech,2006,39(6):1107-1115.
[11] THELEN D G,ANDERSON F C,DELP S L.Generating dynamic simulations of movement using computed muscle control[J]. J Biomech,2003,36(3):321-328.
[12] SASAKI K,NEPTUNE R R.Individual muscle contributions to the axial knee joint contact force during normal walking[J]. J Biomech,2010,43(14):2780-2784.
[13] SÖDERKVIST I,WEDIN P.Determining the movements of the skeleton using well-conf i gured markers[J]. J Biomech,1993,26(12):1473-1477.
[14] SPAGELE T,KISTNER A,GOLLHOFER A.Modelling simulation and optimisation of a human vertical jump[J].J Biomech,1999,32(5):521-530.
[15] ZAJAC F E,NEPTUNE R R,KAUTZ S A. Biomechanics and muscle coordination of human walking:Part II:Lessons from dynamical simulations and clinical implications[J]. Gait Posture,2003,17(1):1-17.
The Model Construction of Lower Limbs’ Skeletal Muscles on the Blocking Actions of Female Volleyball Players
Objective:To simulate the muscle movements of lower limbs while jumping off to do the action of blocking and building the model construction of skeletal muscles on blocking,which will be verif i ed by the surface electromyography (SEMG). Method:The subjects are three excellent female volleyball players in this study. Nine sets of Vicon Mcam2 optical cameras (250 Hz),two force plates and surface electromyography (SEMG) were used to collect data simultaneously. The data processing is based on Matlab and Anybody and an inverse dynamic process was used to calculate the kinetically parameters for the lower extremity. Result:1) the main functional muscle groups while jumping off to do the volleyball blocking action are rectus femoris,Vastus medial,rectus femoris,rectus femoris,tibialis anterior and gastrocne mius. 2) While jumping off,the maximal torque of right hip joint is about 121.7 N·m,the maximal torque of left hip joint is about 83.5 N·m;the maximal torque of right knee is about 107.9 N·m,the maximal torque of left knee knee is about 103.4 N·m;the maximal torque of right ankle is about 78.9 N·m,the maximal torque of left ankle maximum is about 65.6 N ·m. 3) The surface electromyography (SEMG) of vastus medialis,vastus lateralis,rectus femoris,lateral gastrocnemius triceps,medial head of gastrocnemius muscle,showed the same trend with the simulated data. On the other side,the surface electromyography (SEMG) of semitendinosus,semimembranous,tibialis anterior showed a different trend with the simulated data. Conclusion:This study uses the kinematic data to drive the musculoskeletal model and fi nds out that the predicted value is closely related to the SEMG signal and verif i ed the established skeletal muscle model is consistent with the actual muscle activation.
volleyball;blocking;muscles model;EMG
G804.6
A
1002-9826(2017)05-0054-06
10. 16470/j. csst. 201705006
2016-08-08;
2017-06-13
重庆市教委科技项目(1400100)。
苟明,男,副教授,硕士, 研究方向为体育信息技术与运动训练, Tel:(023)67288780,E-mail:43875958@ qq.com。
西南政法大学 体育部,重庆 401120 Southwest University of Political Science and Law,Chongqing 401120,China.
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
中国典型病例大全(2022年7期)2022-04-22
当代陕西(2022年5期)2022-04-19
中国药学药品知识仓库(2022年1期)2022-03-23
科学与财富(2021年33期)2021-05-10
现代装饰(2021年1期)2021-03-29
中国美容医学(2018年12期)2018-02-27
教育教学论坛(2018年1期)2018-01-18
特别健康·下半月(2017年6期)2017-07-31
中外医学研究(2017年15期)2017-06-29