基于PLC与胡克定律的椰子自动开孔机设计
2017-09-22 03:45蔡宽麒
食品与机械 2017年7期
蔡宽麒
陈振斌1
张家豪2
刘博艺3
(1. 海南大学机电工程学院,海南 海口 570228;2. 海南大学农学院,海南 海口 570228;3. 海南大学信息科学技术学院,海南 海口 570228)
基于PLC与胡克定律的椰子自动开孔机设计
蔡宽麒1
陈振斌1
张家豪2
刘博艺3
(1. 海南大学机电工程学院,海南 海口 570228;2. 海南大学农学院,海南 海口 570228;3. 海南大学信息科学技术学院,海南 海口 570228)
依据椰衣厚、韧性大的特点,通过研究椰子的传送、开孔等过程,设计出基于PLC与胡克定律相结合的椰子自动开孔机。整机利用凸轮组和弹簧连杆组周期性释放和存储势能,从而完成椰子开孔过程中锥子周期性进入和退出。利用PLC进行开孔椰子计数、椰子的喂入和开孔过程中皮带的启停控制。该机可提升椰子开孔的安全性、效率和椰子综合利用率,实现椰子开孔收集椰子水的机械化和自动化。
椰子;开孔机;胡克定律
椰子是棕榈科椰子属植物,是一种拥有2 000多年种植历史的热带水果[1]。椰子水是存于椰子腔内的一种天然果汁[2-4],富含碳水化合物、矿物质、维生素、氨基酸等人体必需的营养物质[5-8],其特有的清淡椰香风味和营养价值备受消费者青睐。欧美地区最畅销的椰子水品牌,美国著名品牌“唯他可可”(Vita Coco),在中国部分城市推出了330 mL以及1 L装的两款原味椰子水产品[9]。然而,中国天然椰子水生产过程中机械化程度低,效率低。导致椰子水从原料到成品的时间很难满足不超过72 h的要求。中国拥有近300家椰子加工企业,企业均采用人工开椰壳[10],生产效率低,无法满足天然椰子水规模化生产要求。
目前,国内外关于椰子开孔收集椰子水技术的深入研究较少[11],大部分还处于手动机械和半自动机械状态[12-13],如:曾南春等[14]研制的一种新型开椰器,由一根带锯齿的空心不锈钢管构成,利用人力将把手主体延伸出来的环形锯齿状空心末端压入椰壳内,在椰壳表面形成孔洞,实现椰子的开孔和取汁,但需要消耗大量人力,不能满足生产企业大批量开孔收集椰子水的需求。黄东升[15]所研制的一种自动椰子取汁机,在沿传送带运行方向设有取汁工位,在取汁工位上、下分别设有钻孔装置、取汁装置和顶果装置。虽然能够实现对椰子的钻孔取汁功能,但是机械负载过大,而且该设计还存在机构复杂,成本高,钻头受力大、磨损严重、寿命短,同时运行噪音大、稳定性差等问题。La Epe等[16]发明了由马达驱动的椰子开孔机器,由齿轮、开孔杆、电动马达和复合传动链组成,生产效率为24个/h,其劳动力需求为每人每小时220个椰子,该机消耗劳动力大,自动化水平不高。
本研究设计一种能自动开椰子收集椰子水的机器。其原理是利用电动机转动凸轮压缩弹簧升高产生应力和应变,使得电机输出的机械能转化为弹簧弹性势能和锥子的重力势能,凸轮结束压缩时,势能转化为锥子的动能并在短时间内释放将椰壳击穿,随着凸轮的旋转继而再次压缩弹簧使锥子自动收回,准备下一次开孔,开孔后的椰子通过传送带离开工作台并进行椰汁收集,整个工作过程周期性进行。整机工作结合PLC及其外部传感器设备,从而实现对传送带的运动速度、椰子喂入时间等的闭环控制以及对机器的工作效率进行统计和计算。该机操作简单方便、劳动力资源消耗少、椰肉和椰壳的损伤率低、效率高,能够满足椰子开孔收集椰子水的自动化和规模化生产的要求。
1 整机结构和工作原理
1.1 整机结构
图1为基于PLC与胡克定律相结合的椰子自动开孔机的结构示意图。整机由弹簧连杆装置、凸轮组装置、皮带轮装置、传动装置、电动机和启动装置等组成。
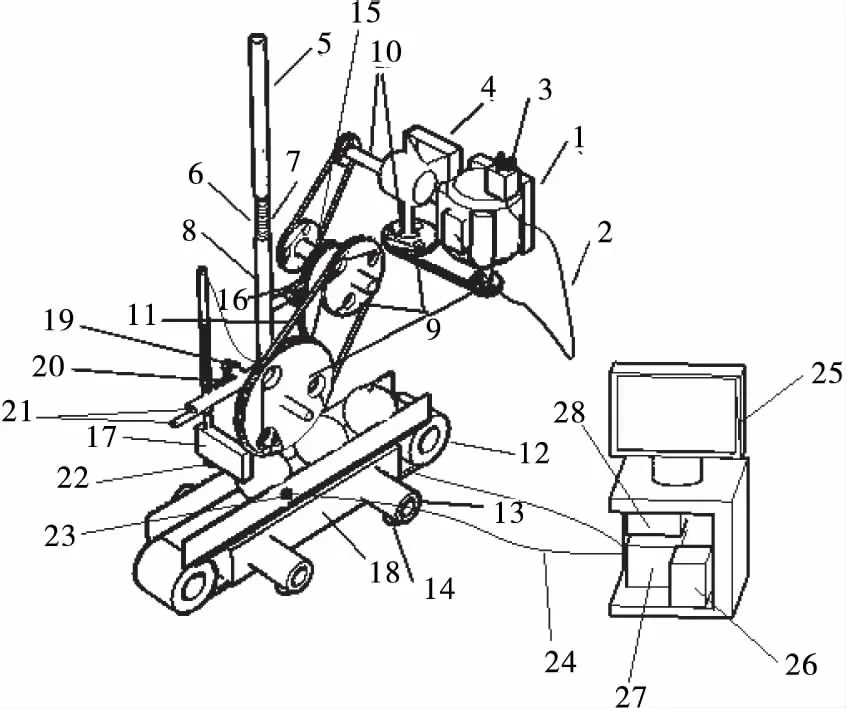
1. 电动机 2. 电线A 3. 插头 4. 减速器 5. 铁柱 6. 弹簧 7. 连锥铁柱 8. 空心钢管 9. 皮带轮A 10. 传动轴 11. 皮带 12. 皮带轮B 13. 出水管 14. 底座 15. 凸轮A 16. 大号滚轮 17. 档板 18. 集椰汁水箱 19. 凸轮B 20. 小号滚轮 21. 支撑杆 22. 距离传感器X1(型号为LJ18A3-8-Z) 23. M4 光电开关传感器X224. 电线B 25. 显示屏 26. 中间继电器 27. 交流接触器 28. PLC
图1 椰子自动开孔机的结构示意图
Figure 1 The schematic diagram of automatic coconuts tapping machine based on the PLC combined with hooke's law
本研究从7个技术参数对椰子自动开孔机进行设计,外形尺寸长3 500 mm,宽2 050 mm,高1 310 mm;整机重量约450 kg;采用约3 kW的配套动力;椰子通过皮带水平进料,皮带的移动速度为2 m/s。整机的开孔率≥95%,取汁产量约13.4 kg/min。
1.2 工作原理
本研究将凸轮组和弹簧连杆组组合,利用电动机输出的机械能转化为弹簧的弹性势能和空心钢管的重力势能,结合热力学第一定律、动量定理中将势能转化为动能[17-19],并在短时间内释放,在锥子与椰壳接触处产生巨大压强,将椰壳击穿,该机械能做到周期性释放和存储,从而实现椰子开孔过程中锥子的进入和退出;通过PLC的外部传感器设备,获取椰子的位置,以调节传送带的运动速度,从而实现椰子的适时喂入;最后,通过PLC中的计数装置,对机器的工作效率进行统计和计算。
1.3 传动过程
椰子自动开孔机的传动过程见图2。将电动机插上电源,通过皮带轮A将电动机产生的能量传递给差速器,在差速器的作用下使其动力与原来方向成90°,并通过皮带轮B传递给凸轮A,其中皮带轮中两转子大小不同,且2个皮带轮相互平行,中间有可旋转式传动轴B。传动轴B上含有凸轮A,通过凸轮A转动带动滚轮上升,滚轮紧连着弹簧连杆机构,当滚轮上升时压缩弹簧,产生弹性势能,当轮盘升到足够高时,滚轮与凸轮分离,连锥铁柱受到重力作用和弹力作用,对传送带送来的椰子产生一个冲力,通过锥子将这些动能作用于椰子的一个点上,将椰子打穿,然后通过皮带轮运出。其中皮带轮C将转矩传递给传动轴C,并带动凸轮B转动,从而带动活动门的升降,挡住椰子防止其在被击穿时,因为受力不均导致椰子从皮带轮上滚落。

图2 椰子自动开孔机的工作流程
2 关键部分设计和参数分析
2.1 弹簧连杆装置设计与分析
2.1.1 弹簧连杆装置运动过程 图3为弹簧连杆装置,该装置由连锥铁柱壳、连锥铁柱芯、弹簧拼接而成。连锥铁柱壳后部的空心半径较小,以便于卡住弹簧,前部分连锥铁柱壳的内径大可以使连锥铁柱芯顺利通过,连锥铁柱壳左边伸出圆柱型管,利于弹簧连杆结构的固定,右边为半弧形挡板,使得弹簧返回原长时可以阻止其过度下降而造成机器损坏。连锥铁柱芯边上与支架焊接,支架上连接滚轮,滚轮尺寸和凸轮上的凹槽相匹配,以防止凸轮带着滚轮上升时滚轮与凸轮发生偏离,弹簧与连锥铁柱芯运动同步,当弹簧压缩时连锥铁柱芯上升,弹簧储存弹性势能,当滚轮与凸轮脱离时,弹性势能瞬间释放,滚轮和连锥铁柱芯到达最低点,凸轮旋转一周后,与滚轮相结合凸轮带动滚轮再次上升,进入下一个循环。

1. 弹簧 2. 连锥铁柱 3. 滚轮 4. 空心钢管
2.1.2 弹簧连杆的参数设计 本研究所设计的弹簧其作用在于将外力转变为弹性势能形式存储,然后利用能量使连杆快速地竖直向下运动。图4为弹簧连杆机构在弹簧空载、受到压缩和做功状态下的示意图。为了防止弹簧连杆装置在高速运转下,承受交变载荷导致其超过疲劳强度或发生共振而崩坏,将弹簧设计为双弹簧嵌套式,并且以椰子为研究对象进行了受力分析,见图5。
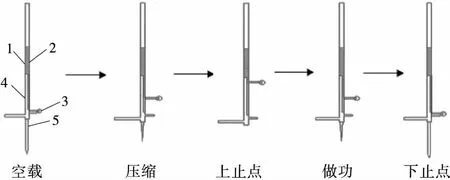
1. 弹簧 2. 连锥铁柱 3. 滚轮 4. 空心钢管 5. 尖锥

图5 椰子受力分析图
为使得椰子能顺利开孔,根据图 5建立椰子水平和竖直方向的力学平衡方程:
(1)
式中:
f——皮带对椰子的摩擦力,N;
r——椰子半径,mm;
f′——单位皮带对椰子的摩擦力,N;
N3——基部对椰子的支持力,N;
N2、N1——皮带对椰子的横向支持力,N;
G——椰子的自身重力,N;
F——弹簧工作作用力,N。
基于胡克定律:
F=kx,
(2)
式中:
k——弹簧劲度系数,N/m;
x——弹簧伸长量,m;
F——弹力,N。
参照弹簧设计手册[20],设计的弹簧为不锈弹簧钢材质的圆柱压缩弹簧,其主要参数见表1。

表1 弹簧的主要参数
2.2 锥子的受力分析和设计
在打入椰子时,锥子先承受椰子径向的压应力,后承受椰衣对锥子侧向的反作用力,见图6。为了使锥子进入椰衣更省力,将锥口做成尖圆弧状。椰子壳由于成熟程度不同,椰衣硬度也不同,通常用于加工的椰子椰衣厚度为1.7~2.3 cm,所以取椰衣的平均厚度2 cm。对锥子进行参数设计,其中F与锥子底面半径的经验公式为:

(3)
式中:
F——椰子开孔所需的受力,N;
S2C2——锥子底面积,mm2;
S2——锥子顶面积,0.012 8 mm2;
εm——机械效率,0.97;
p——进锥口的压强,1 MPa。
锥口尖角按式(4)计算:

(4)
式中:
β——锥口尖角,(°);
SS2——锥子高度,30 mm;
S2C——锥子底面半径,20 mm。
锥子底面积为圆形,由式(3)可求出锥子底面积大小,结合圆的面积公式,可求得锥子底面半径S2C≈20 mm。结合式(4)可求得其锥口尖角为14.26°。锥子三视图见图7。如果锥身过长会使锥子强度、刚度下降,而过短则又无法将壳完全穿透。锥口前角如果过大,锥口过钝必然使椰子开孔所需力增大,而过小又使锥口的强度变小,在开孔过程中易弯曲而产生故障。结合海南人工使用钢制刺锥开孔情况,确定该椰子开孔机使用钢制锥子。

图6 锥子尖端受力分析图
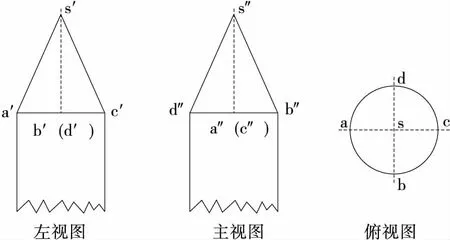
图7 锥子三视图
2.3 皮带的设计
2.3.1 椰子在皮带轮上的运动过程 由人工将椰子正立,并置于上皮带的倒圆台型凹槽中,当皮带轮转动时,椰子会随之在皮带轮上稳定移动。当椰子随着皮带轮平移到钢锥正下方时,活动门关闭,钢锥下降将椰子击穿,此时钢锥的尖端正好处在圆台内,随后凸轮转动,带动连锥铁柱上升,当尖锥末端离开椰子时,活动门开启,皮带轮继续带着已开孔的椰子前进,由于传送带左右有挡板阻挡,所以椰子水和碎渣不会到处飞溅,造成污染。其中椰子水经过滤纸,滤网流入槽中收集。
2.3.2 皮带尺寸分析 成熟椰子直径为250~330 mm,故设计皮带轮上表层圆台缺口槽的圆弧部分半径为150 mm,下表层圆台缺口槽的圆弧部分为200 mm。在皮带的下方为4个支座支撑的椰子水收集箱;收集箱中设计离心过滤系统,可将椰子水中的椰壳、椰青丝等杂物分离,再通过出口中的4个滤网进行过滤采集。其设计图见图8。
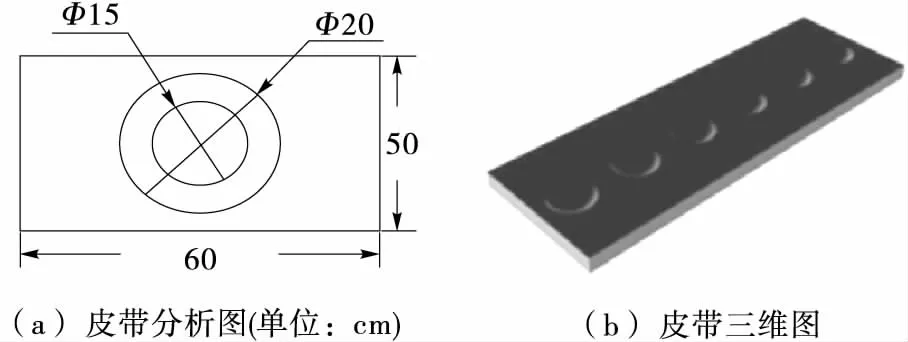
图8 皮带设计图
2.4 凸轮的设计
凸轮是本机械中最重要的装置之一,其功能是压缩弹簧连杆机构的弹簧,并使弹簧连杆装置能够按照竖直轨迹做往复运动,为了使得所设计的凸轮装置结构简单、避免从动件与凸轮接触磨损快,将凸轮设计为盘型凸轮,在从动件顶部安装滚轮,其优点在于耐磨损,可承受较大的载荷。凸轮设计示意图见图9。
3 电控部分的设计
3.1 控制系统 I/O 口的分配
机器采用 PLC 控制,用于解决现有椰子开孔取汁自动化程度低、工作可靠性与协调性差等问题[21-22]。根据椰子自动开孔机的自动控制需求,将该机器I/O分配情况列出。依据所述I/O分配的顺序和工作要求画出梯形图见图10。

O1. 凸轮的旋转中心 O2. 位滚轮的滚动中心 P. 滚轮和凸轮相切点
图9 凸轮设计示意图
Figure 9 CAM design diagram
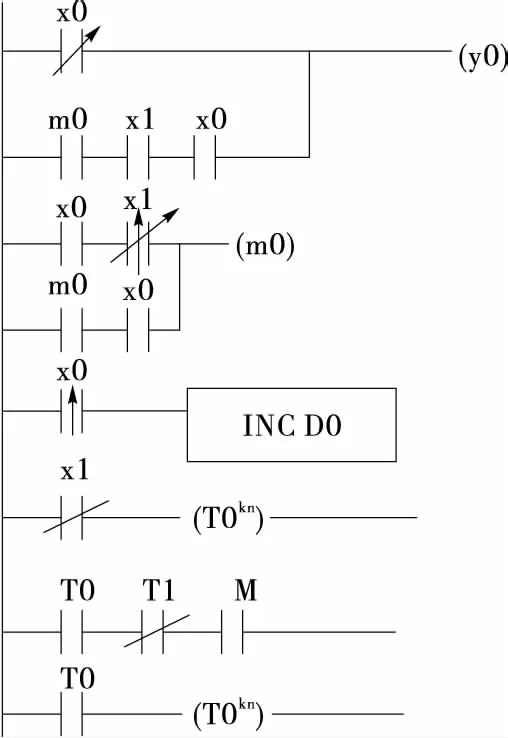
X0. 光电开关传感器,表示椰子到达锥子下方,用来控制皮带轮B的启停 X1. 距离传感器,表示挡板到达指定位置后再次上升,用来控制皮带轮B的启停 Y0. 皮带轮B的启停 D0. 寄存器 T0. 与X0相连的计时器 T1. 与X1相连的计时器 M. 刀具的运动
图10 椰子开孔机控制系统梯形图
Figure 10 The sequential function diagram of control system
3.2 PLC控制过程
椰子自动开孔机的电控部分包括距离传感器、光电开关传感器、显示屏、中间继电器、交流接触器、PLC。其工作流程:首先电机控制传送带转动,传送带带动椰子传送到锥子下方时,X0感应到椰子,PLC接收到由X0传来的电信号。PLC发送皮带轮B停止转动的信号,传送带停止转动。同时PLC的D0的数字加1。当挡板距离传送带20 cm以内时,装在挡板中间的X1将停止向PLC输出信号。当挡板从传送带上上升到20 cm安全高度时,由于装在挡板中间的X1离传送带超过20 cm,X1再次向PLC发出信号。PLC收到信号,说明已完成(椰子开洞然后挡板上升到足以让椰子通过的安全高度)这一过程。PLC发送皮带轮B开始转动的信号,皮带轮B再次开始转动。
4 结论
(1) 运用电子机械相结合的方式,利用凸轮装置和弹簧连杆机构结合胡克定律,使得势能周期性地存储、释放以及转化为动能,从而做到周期性快速开孔,并且能保持椰壳完整性;PLC以及光电传感器可使得椰子开孔效率可视化、并且完成皮带在椰子的喂入和开孔过程中的启停。对椰子自动开孔机各机构进行参数设计,力求在达到开孔率较高的前提下,使得各机构更加紧凑、简便。
(2) 椰子自动开孔机的设计和研制,将解决取椰子水时劳动力资源消耗大,椰肉、椰壳的损伤率高、生产效率和安全系数过低等问题,提高了椰子的利用率和经济效益,对中国椰子产业的发展起到了促进作用。
[1] APPAIAH P, SUNIL L, KUMAR P K P, et al. Composition of coconut testa, coconut kernel and its oil[J]. Journal of Oil & Fat Industries, 2014, 91(6): 917-924.
[2] 张浩栋, 张燕, 梁栋. 椰子滚切式剥衣机的设计[J]. 食品与机械, 2013, 29(1): 167-169.
[3] 周文化, 杨慧敏, 李维敏, 等. 椰子水饮料贮藏稳定性及流变学特性的试验研究[J]. 农业工程学报, 2013, 29(19): 262-267.
[4] 周开欢, 张燕. 转盘式椰壳打孔取汁机的设计[J]. 食品与机械, 2014, 30(4): 96-98.
[5] TINCHAN P, LORJAROENPHON Y, CADWALLADER K R, et al. Changes in the profile of volatiles of canned coconut milk during storage[J]. Journal of Food Science, 2015, 80(1): 49-54.
[6] GOPIKRISHNA V, BAWEJA P S, VENKATESHBABU N, et al. Retraction. Comparison of coconut water, propolis, HBSS, and milk on PDL cell survival[J]. Journal of Endodontics, 2014, 40(2): 290-290.
[7] 张浩栋, 张燕, 梁栋. 椰子滚切式剥衣机的设计[J]. 食品与机械, 2013, 29(1): 167-169.
[8] 樊伟伟, 余锐, 黄惠华, 等. 海南椰奶清补凉饮料的生产工艺研究[J]. 现代食品科技, 2011, 27(6): 691-694.
[9] KEAST D R, KAPICA C M, HOERR S M. Replacing beverages with Vita Coco coconut water can decrease dietary intake of sugars and increase vitamin C, calcium, magnesium and potassium intakes by adults aged 19 years and older: What We Eat in America (WWEIA/NHANES 2007-2010)[J]. FASEB Journal, 2013, 27(1): 243.
[10] IVANOV V, SAVITSKI D, SHYROKAU B. A survey of traction control and antilock braking systems of full electric vehicles with individually controlled electric motors[J]. IEEE Transactions on Vehicular Technology, 2015, 64(9): 3 878-3 896.
[11] 张志强, 樊军庆, 王涛. 椰子剥衣机的设计[J]. 食品与机械, 2015, 31(3): 122-124.
[12] BABEL S, KURNIAWAN T A. Cr(VI) removal from synthetic wastewater using coconut shell charcoal and commercial activated carbon modified with oxidizing agents and/or chitosan[J]. Chemosphere, 2004, 54(7): 951-967.
[13] 张世煦. 椰子壳打洞器: 中国, CN202800079U[P]. 2013-03-20.
[14] 曾南春, 林冬冬, 谢占, 等. 一种新型开椰器: 中国, CN203815326U[P]. 2014-09-10.
[15] 黄东升. 一种自动椰子取汁机: 中国, CN2015161811U[P]. 2016-04-20.
[16] EPE L A, PEREZ A K, SAYSON Z D, et al. Performance of pedal-operated coconut grater machine[J]. Iamure International Journal of Mathematics Engineering & Technology, 2014, 31(5): 245-256.
[17] MALYARENKO A, OSTOJA-STARZEWSKI M. A Random Field Formulation of Hooke’s Law in All Elasticity Classes[J]. Journal of Elasticity, 2017, 127(2): 269-302.
[18] GERJUOY E. Extensions of the Momentum-Transfer Theorem[J]. Physical Review Letters, 1966, 16(4): 132-135.
[19] HAJIAN K. Conserved charges and first law of thermody-namics for Kerr-de Sitter black holes[J]. General Relativity & Gravitation, 2016, 48(8): 114.
[20] 秦大同, 谢里阳. 弹簧设计[M]. 北京: 化工工业出版社, 2013: 15-54.
[21] 余山山, 张文毅, 吴崇友, 等. 盘育秧精密播种流水线PLC控制系统设计[J]. 农业工程学报, 2009, 25(11): 202-207.
[22] 谢守勇, 李锡文, 杨叔子, 等. 基于PLC的模糊控制灌溉系统的研制[J]. 农业工程学报, 2007, 23(6): 208-210.
The design of coconut automatic tapping machine base on PLC and Hooke law
CAIKuan-qi1
CHENZhen-bin1
ZHANGJia-hao2
LIUBo-yi3
(1.CollegeofMechanicalandElectricalEngineering,HainanUniversity,Haikou,Hainan570228,China; 2.AgriculturalCollege,HainanUniversity,Haikou,Hainan570228,China; 3.InformationScience,HainanUniversity,Haikou,Hainan570228,China)
In order to solve the problem in the process of coconut juicing during labor consumption, inefficiency, wasting of coconut resources and other issues, we designed an automatic coconuts tapping machine based on the PLC combined with Hooke's Law, machine group and the cam spring link group release, and storage of potential energy regularly. With the studying by the transfer of coconut, opening and other processes, and completing the process of coconut punch awl periodic entry and exit, we also used PLC (Programmable Logic Controller) to make coconut opening efficiency visualized, feeding and opening of coconut during belt start-stop control. The machine was found to show excellent performance, working stably and safely and easily operated. The machine could promise a prospect of automation coconut juicing application.
Programmable Logic Controller; equipment; coconut; juicing; Hooke's law
国家自然科学基金项目(编号:51166002);海南省自然科学基金项目(编号:617048);大学生创新创业训练项目(编号:201610589003)
蔡宽麒,男,海南大学在读本科生。
陈振斌(1968—),男,海南大学机电工程学院教授,博士。E-mail: zhenbin1208@hainu.edu.cn
2017—04—28
10.13652/j.issn.1003-5788.2017.07.022
猜你喜欢
传奇·传记文学选刊(2022年4期)2022-04-23
华声文萃(2022年3期)2022-03-31
民间故事选刊·上(2022年1期)2022-02-09
洁净煤技术(2021年2期)2021-04-08
上海故事(2021年1期)2021-03-18
海南大学学报(自然科学版)(2020年3期)2020-10-21
特别文摘(2018年8期)2018-08-20
小小说月刊·下半月(2018年12期)2018-02-28
养生保健指南(2017年12期)2017-12-07
数学小灵通·3-4年级(2017年4期)2017-05-04