双弧面凸轮式步进驱动型机械手的设计及仿真分析
2017-09-22 03:45葛正浩
食品与机械 2017年7期
葛正浩
申娇娟
司贤永
韩啸宇
(陕西科技大学机电工程学院,陕西 西安 710021)
双弧面凸轮式步进驱动型机械手的设计及仿真分析
葛正浩
申娇娟
司贤永
韩啸宇
(陕西科技大学机电工程学院,陕西 西安 710021)
以弧面凸轮机构为基础,设计双弧面凸轮式步进驱动型机械手来实现机械手输出执行件“提升—前进—下降—后退”的步进运动。根据机械手输出的目标循环动作,设计运动循环图。利用Creo3.0建立双弧面凸轮式步进驱动型机械手的数字化样机,最后基于ADAMS进行运动学仿真分析,输出执行件的位移、速度、加速度以及碰撞力与碰撞力矩的曲线,验证了设计结果的正确性。
双弧面;凸轮式机构;步进驱动型;机械手;运动循环图;动力学分析
在自动化生产线中经常需要某一个机器实现一个非常单一的步进动作,其主要特点是输出执行的动作具有定周期的动停运动。传统的气压或液压控制执行的搬运机械手,加速度和速度很难做到平缓过度,特别在开始和停止时动作太过迅猛、冲击刚度非常大;电动机驱动控制型的机械手,对企业技术人员的综合技能要求较高,由于核心技术被国外垄断,导致成本较高;凸轮机构可使输出构件实现步进运动,几乎所有简单的、复杂的重复性机械运动都可以用凸轮机构或含其在内的组合机构实现。凸轮机构作为驱动控制机构的机械手, 具有动作精准、工作速度可控、使用成本低、布局紧凑等优点[1-2],目前在自动化生产线中应用越来越多。国外对于凸轮式机械手的应用研究较早,日本已经研究出多种形式的凸轮式机械手,并使凸轮式机械手进入了系列化生产阶段[3-4];欧美国家在凸轮式机械手方面的研究也处于领先地位;而中国对于凸轮式机械手的研究起步较晚,尤其是对于不易加工的弧面凸轮的应用研究甚少[3-4]。凸轮式步进驱动型机械手的提出始于德国Ferguson公司,由美国CAMCO公司在此基础上进一步发展并进行生产,而中国使用这种装置都依赖于进口,价格昂贵,而且使用和维修都需要专业的人员指导,不利于生产需求[3]。双弧面凸轮式步进驱动型机械手可以广泛应用于包装自动化生产线上,有利于产品的系列化,所以双弧面凸轮式步进驱动型机械手的研究很有意义。随着计算机技术的发展,可以对机器的真实运动情况进行模拟,进而对样机中的缺陷进行改进,以开发与试验检测并行的设计方式设计出符合要求的物理样机,最大限度地提高设计效率及整机质量。本研究基于Creo3.0建立双弧面凸轮式步进驱动型机械手的数字化样机[5-6],然后应用ADAMS进行动态仿真分析,其动态性能参数对凸轮式步进驱动型机械手的设计具有非常重要的指导意义。
1 双弧面凸轮式步进驱动型机械手的设计
1.1 双弧面凸轮式机构的设计方案
本设计的步进驱动型机械手的输出执行件的升降与进退直线运动均由弧面凸轮带动从动盘上的摆杆往复摆动来实现。摆杆的圆弧运动在二维平面内可以分解为互相垂直的2种运动,多余的运动靠滑槽分解。此设计整体结构简单,设备体积小且弧面凸轮机构会提高输出端块的定位精度等级,双弧面凸轮式设计方案见图1。

1. 输出端块 2,6. 摆杆 3,7. 从动盘 4. 升降弧面凸轮 5. 凸轮轴 8. 进退弧面凸轮
图1 双弧面凸轮式方案设计
Figure 1 Conceptual design of globoidal cam
1.2 运动循环图的设计
机械手手臂的运动循环图采用直角坐标式可以直观地展示出机械手手臂的动作顺序。双弧面凸轮式步进驱动型机械手所输出的动作为“提升—前进—下降—后退”,升降和进退动作各由一个弧面凸轮机构控制,凸轮的轮廓曲线为1个推程期、1个回程期和2个停歇期。图 2是以输出端升降距离50 mm和进退距离100 mm,凸轮轴按照“60°—120°—60°—120°”分度为例设计的运动循环图[7],其中x轴代表弧面凸轮主轴转动角,y轴代表机械手输出执行件的位移。

图2 机械手手臂工作循环图
步进驱动型机械手的一个完整的执行件输出动作中,分别由升降和进退弧面凸轮机构驱动机械手实现。凸轮轴的连续转动通过弧面凸轮机构可以转变成从动件的间歇往复摆动,摆动滚子从动件弧面凸轮机构从动件的工作运动过程可分为停歇、升程、停歇、回程4个阶段,在弧面凸轮的回转体上既有升程段也有回程段,即 “左旋”与“右旋”同在。当机械手输出执行件的运动位移较大时,小摆角会使凸轮机构的摆杆过长,使得机械手的整体体积增大,同时使凸轮的接触力变大,可以采用多头摆动滚子从动件弧面凸轮机构,增加从动件的摆角以减小摆杆长度,优化机构的动力性能,同时能够提高机器的承载能力[6]。单头和多头摆动滚子从动件弧面凸轮的展开示意图见图3。升降和进退弧面凸轮的三维实体模型见图4。

图3 摆动滚子从动件弧面凸轮展开示意图
Figure 3 Schematic diagram after deployment of globoidal cam with oscillating roller follower

图4 弧面凸轮模型图
1.3 双弧面凸轮式步进驱动型机械手的数字化样机
减速电动机输出动力带动凸轮轴转动,凸轮轴上固定连接有进退和升降弧面凸轮,2弧面凸轮分别带动从动盘作周期性摆动,再通过摆杆和滑槽使间歇摆动转化为直线运动,2直线运动通过有规律的运动组合使机械手臂实现“提升—前进—下降—后退”定周期性的动作。将各个零部件按照功能要求进行装配,双弧面凸轮式步进驱动型机械手数字化样机模型见图5。
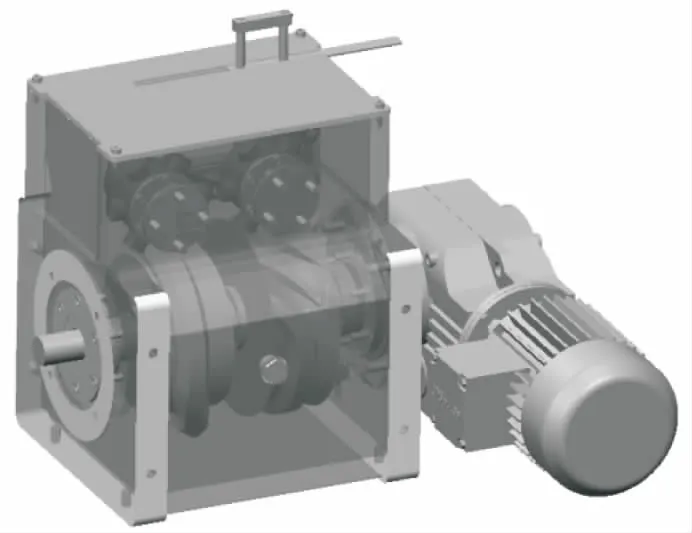
图5 双弧面凸轮式机械手数字化样机
2 步进驱动型机械手的动力学仿真模型
2.1 机械手动力学仿真模型的建立
将Creo3.0中的凸轮式步进驱动型机械手模型保存为“x_t”格式的副本文件,然后在ADAMS中通过Import选项导入该模型[8-9]。模型导入后,零件的质量属性和约束关系均丢失需要重新设置;同时为了使分析过程更符合实际情况,对重力加速度和单位进行设置。
2.2 添加约束及设置接触力
该模型需要添加的约束分别为:双弧面凸轮分别与主动轴之间的固定副;滑轨与大地之间的固定副;凸轮轴与大地之间的旋转副;摆杆与大地之间的旋转副;滑块与滑轨之间的移动副。
碰撞接触力是作用在物体上的特殊力,只有当物体的几何外形相互接触时才会有接触力的作用。根据凸轮和滚子的几何参数确定接触刚度(k)、力的指数值(e)、阻力系数(C)和全阻尼时的穿透值(δ),将弧面凸轮与从动盘之间的接触等效为2个变曲率半径柱体的碰撞问题,碰撞力定义[10]如下:
(1)
式中:
STEP——阶跃函数;
q0——两物体间初始距离,mm;
q——构件碰撞过程中的实际距离,mm。
2个变曲率半径柱体在接触时产生的接触法向力P和变形δ的关系有:
P=K×δ3/2。
(2)
接触刚度的公式:
K=(4/3)R1/2×E*,
(3)
其中:1/R=1/R1+1/R2,R1、R2分别是弧面凸轮和滚子接触点的当量半径,mm。

(4)
式中:
μ1、μ2——分别为凸轮和滚子材料的泊松比;
E1、E2——分别为凸轮和滚子所选材料的弹性模量。
一般情况下,与凸轮的曲率半径相比滚子半径很小,所以:1/R≈1/R2。
2.3 外部载荷的定义及添加驱动
凸轮式步进驱动型机械手一个完整的运输过程包括提升、前进、下降、后退4个动作。凸轮轴从0°旋转到10°时机械手处于空载时期不承受外部工件重量,凸轮轴从10°旋转到15°时机械手开始承受外部工件重量;凸轮轴从15°旋转到225°时机械手完成运输过程,手臂一直承受外部工件重量;凸轮轴从225°旋转到230°时开始放置工件,手臂承受的外部载荷逐渐为0;凸轮轴从230°旋转到360°时机械手完成复位动作外部载荷为0[11]。
本设计机械手的外部载荷STEP函数定义为:
step(time,0.056,0,0.83,50)~step(time,1.25,0,1.28,50),
(5)
在凸轮轴和大地的旋转副上给定电机驱动,凸轮旋转的角速度值为30 r/min。双弧面凸轮式机械手的虚拟样机见图6。

图6 双弧面凸轮式机械手仿真模型
3 步进驱动型机械手的仿真分析
3.1 仿真求解参数的设置
为了得到精确度较高的速度曲线、加速度曲线,提高求解的稳定性,需要对仿真输出步长(步数500和仿真时间2 s)和求解器(Wstiff积分器和SI2积分形式)进行设置,在仿真步长很小的情况下也能保证雅克比矩阵的稳定性。
3.2 仿真结果及分析
以机械手输出端为研究对象,求解其位移、速度、加速度[9-10],以弧面凸轮与滚子为对象求解其接触力(Force)与接触力力矩(Torque)。
如图7、8所示,3条曲线分别是双弧面凸轮式机械手完成进退(升降)动作时输出端的位移、速度和加速度曲线,速度最大值出现在推程中点,且位移、速度和加速度曲线与修正正弦运动规律理论曲线相符,速度及加速度曲线基本上没有抖动,说明其运动特性良好。
最大接触力和最大接触力矩见图9、10。由仿真结果知:机械手速度最大时凸轮机构的碰撞力和碰撞力矩最大,在停歇段凸轮机构的碰撞力和碰撞力矩最小,符合实际情况。
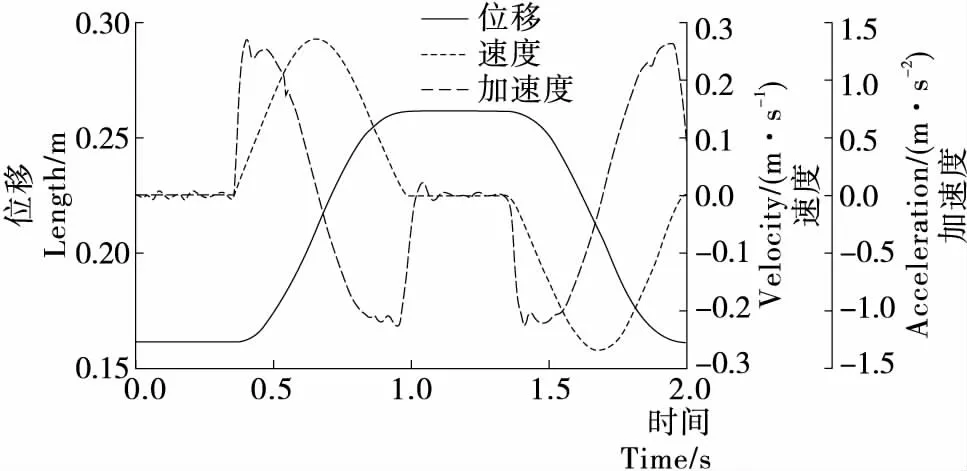
图7 机械手进退动作位移、速度和加速度曲线
Figure 7 Displacement, velocity and acceleration curve of manipulator forward and backward movement
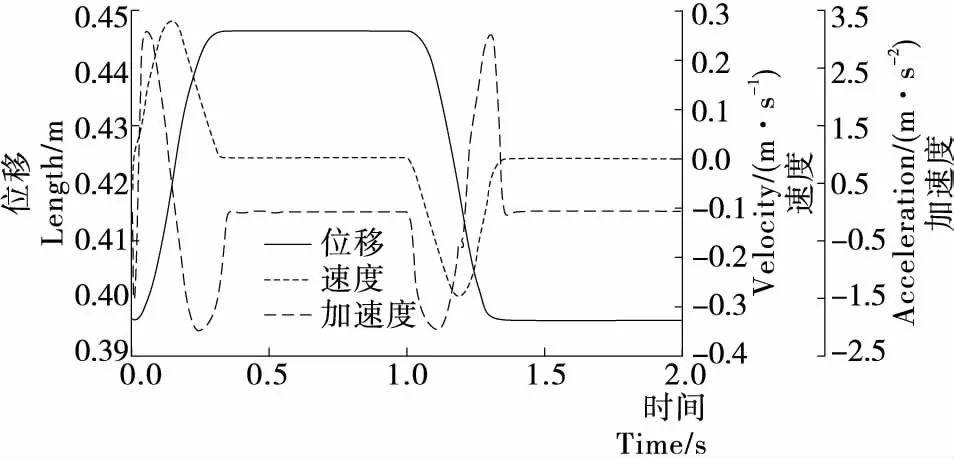
图8 机械手升降动作位移、速度和加速度曲线

图9 进退弧面凸轮机构碰撞力和碰撞力矩曲线

图10 升降弧面凸轮机构碰撞力和碰撞力矩曲线
4 结论
根据机械手的执行动作设计凸轮运动循环图,设计一款凸轮式步进驱动型机械手;建立该机械手的数字化样机,尤其是对两端的弧面凸轮进行了参数化建模;最后通过ADAMS对整机进行了仿真验证和分析。结果表明,该机械手的位移、速度和加速度曲线与修正正弦运动规律理论曲线相符,速度及加速度曲线基本上没有抖动,运动特性良好,碰撞力和碰撞力矩也符合实际情况。试验只对步进驱动型机械手进行了多刚体动态仿真,为了更加接近实际工作环境,今后可对机构进行刚柔耦合的动力学分析。
[1] 曹西京, 曹巨江. 弧面凸轮钢球式机械手的设计研究[J]. 研究·设计·制造, 2003(2): 32-33.
[2] 余剑武, 舒新, 罗红, 等. 灌装机中弧面凸轮建模与造型研究[J]. 食品与机械, 2016, 32(6): 77-82.
[3] 杨妮. 冲压上下料直动型弧面凸轮机械手的设计与研究[D]. 西安: 陕西科技大学, 2007: 8-9.
[4] 刘庆立. 弧面凸轮机械手的参数化与仿真[D]. 西安: 陕西科技大学, 2009: 3-4.
[5] 黄薇, 葛正浩, 刘韦华, 等. 基于VB6.0和Pro/E的弧面分度凸轮三维参数化实体建模[J]. 机械传动, 2012(9): 41-44.
[6] 曹鹏, 葛正浩, 刘小琴. 基于Pro/E的多头弧面凸轮三维建模及运动仿真[J]. 机械传动, 2016, 40(7): 97-100.
[7] 杜钧祖, 贾争现, 曹巨江. 滚子齿形凸轮循环图的设计与分析[J]. 西北轻工业学院学报, 2002, 20(5): 30-33.
[8] 秦成. 基于Pro/E和ADAMS的凸轮机构虚拟样机研究[J]. 机械工程与自动化, 2008(4): 35-36.
[9] 席晓燕. 推料机构凸轮轮廓曲线设计仿真及误差分析[J]. 食品与机械, 2017, 33(2): 77-80.
[10] 石明金. 基于ADAMS的多接触研究[J]. 计算机工程与应用, 2004(29): 220-222.
[11] 马志平. 弧面分度凸轮机构刚柔耦合动力学研究[D]. 西安: 陕西科技大学, 2014: 43-60.
Design and simulation analysis for double globoidal cam-type stepping drive manipulator
GEZheng-hao
SHENJiao-juan
SIXian-yong
HANXiao-yu
(MechanicalandElectricalEngineeringCollege,ShaanxiUniversityofScienceandTechnology,Xi’an,Shaanxi710021,China)
Based on the theory of globoidal cam mechanism, the double globoidal cam-type stepping-driven manipulator is designed to realize the step-by-step movement of the actuator output “lifting, forward, falling, retreating”. According to the target rotation of the robot output, design the motion cycle diagram. Finally, the kinematic simulation analysis based on ADAMS, the displacement of the actuator, the velocity, the acceleration curve and the curve of the collision force and the collision torque were analyzed by using Creo3.0 to build the digital prototype of the double globoidal cam-type stepping-driven manipulator . To verify the correctness of the design results.
Double globoidal cam mechanism; step-driven manipulator; motion cycle diagram; dynamics analysis
西安市科技计划项目(编号:CXY1431﹝3﹞);陕西省教育厅服务地方专项计划项目(编号:15JF010)
葛正浩(1964—),男,陕西科技大学教授,硕博士研究生导师,博士。E-mail:285188506@qq.com
2017—04—05
10.13652/j.issn.1003-5788.2017.07.016
猜你喜欢
哈尔滨轴承(2021年1期)2021-07-21
哈尔滨轴承(2021年4期)2021-03-08
陕西科技大学学报(2020年2期)2020-05-13
制造技术与机床(2019年8期)2019-09-03
轴承(2018年10期)2018-07-25
精密制造与自动化(2018年1期)2018-04-12
中国机械工程(2015年13期)2015-12-16
华东理工大学学报(自然科学版)(2015年1期)2015-11-07
中小企业管理与科技·中旬刊(2014年8期)2014-09-22
河南科技(2014年16期)2014-02-27