
基于多特征融合的SVM高分辨率遥感影像建筑物提取方法
2017-09-22 09:47:05赵春晖李思聪
沈阳大学学报(自然科学版) 2017年4期
赵春晖, 李思聪
(哈尔滨工程大学 信息与通信工程学院, 黑龙江 哈尔滨 150001)
基于多特征融合的SVM高分辨率遥感影像建筑物提取方法
赵春晖, 李思聪
(哈尔滨工程大学 信息与通信工程学院, 黑龙江 哈尔滨 150001)
通过有效地利用多源遥感数据,基于灰度共生矩阵和双边滤波等方法提取建筑物的低层特征,并通过SVM初分类得到建筑物的高层语义特征,将低层特征与高层特征进行有效地融合成为新的特征用于建筑物提取.实验结果表明,进行多特征融合后的建筑物提取的完整率和正确率都得到了提高.
高分辨率遥感影像; 建筑物提取; SVM; DSM; 语义特征
随着航天技术及遥感技术的迅速发展,遥感影像的分辨率与准确度得到了极大的提高,且遥感信息日趋多源化、丰富化.建筑物是城市或城郊地面的重要特征,精确有效地提取建筑物区域在城市规划、灾害预报、资源勘探、地理信息系统库更新、数字化城市以及军事侦察等领域有着重大的意义[1].
高分辨率遥感影像细节丰富,地物信息复杂,相对而言,提取有效信息的难度更大.
目前的建筑物提取根据使用的数据源不同主要可分为以下三类:①通过高分辨率遥感影像提取建筑物,主要利用建筑物的各种形状,边缘及阴影等特征并结合不同的分割算法,进行建筑物区域的提取.若达到建筑物的精确提取,算法大多较为复杂[2].②通过机载激光雷达(LiDAR)数据等高程数据来提取建筑物,目前大多是使用数字表面模型(DSM)等灰度影像数据结合边缘检测和阈值判断等来提取建筑物,这种方法对于高度较高的建筑物提取较精确,对于低矮的建筑物以及与树木混杂的建筑物提取效果不理想[3].③通过高分辨率遥感影像及LiDAR等高程数据结合的建筑物提取方法,由于结合了高分辨率遥感影像丰富的光谱和空间信息以及高程数据对于建筑物提取的优势,提取精度较高,是目前建筑物提取的主要研究方向[4].
本文在第③类方法的基础上,针对高分辨率遥感影像建筑物的特点,结合DSM数据,使用支持向量机(SVM)进行分类,并融入了影像的纹理特征,空间邻域特征,光谱特征以及高层语义特征,在算法上进行了改进.
1 支持向量机(SVM)
支持向量机(SVM)是Vapnik[5]等人提出的一种基于结构化风险最小化的统计学习方法.其主要思想是通过对训练样本的计算,寻找一个可以使两类样本被分开且间隔最大的最优的分类超平面,同时所得的期望风险最小.SVM通过引入核函数,将低维线性不可分问题转化到高维特征空间使其变得线性可分.常用的核函数有线性核函数、多项式函数、高斯径向基函数和Sigmoid函数等[6].
SVM的二元分类可看作求解如下优化问题:
式中:w为权值向量;b为偏置;xi为训练样本;C为给定的参量;ξi为样本xi对应的松弛变量.解上述目标函数可得最优分类超平面(图1).
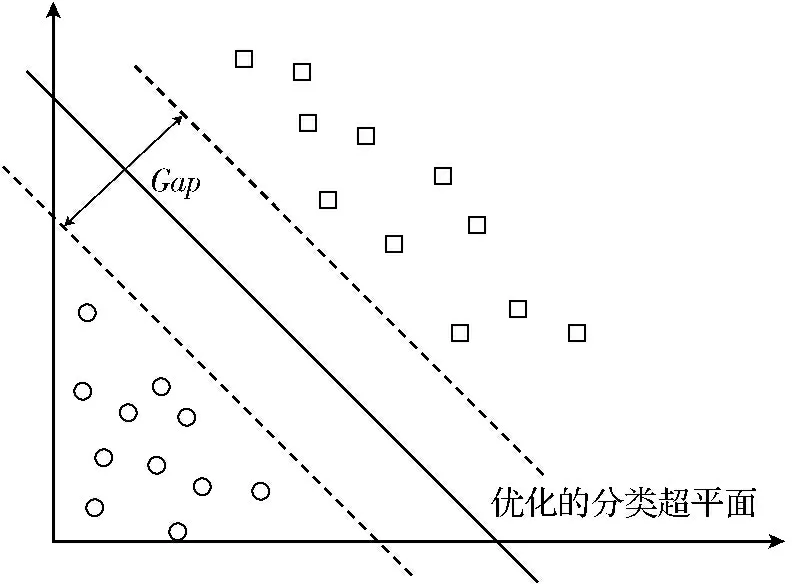
图1 SVM最优分类超平面
Fig.1 The optimal margin hyper-plane of SVM
引入核函数的SVM判决函数为:
式中:k(xi,x)为选择的核函数;α为拉格朗日乘子.
2 多特征融合SVM建筑物提取算法
高分辨率遥感影像中,由于空间分辨率的提高,同类地物内部的光谱差异有时会变得很大,纹理信息,边缘信息也都会更加复杂.本论文结合DSM高程数据,将“高度”这一建筑物明显的特征加入到复杂的光谱特征中,并对融合后的影像进行空域滤波和纹理特征提取,加入邻域空间信息和纹理特征.然后利用支持向量机(SVM)进行影像分类,得到初始的SVM分类结果,并将其进行空域滤波后的结果作为一维新的语义特征加入之前提取的特征向量中,进行第二次SVM分类,得到最终的建筑物提取结果.
2.1特征提取
建筑物的特征包括其颜色特征、纹理特征、空间关系特征等.单一的颜色(光谱)特征不能表达其空间分布的信息.而图像的纹理特征描述了图像区域所对应景物的表面性质,反映了图像像素灰度值的空间分布信息.空域滤波将孤立的像元与其周边像元相结合,使得单一像元具有了邻域像元的信息,将其作为遥感影像的光谱----空间结合特征.
首先需要对DSM数据进行预处理,去除地形因素(DTM)的影响,得到归一化的nDSM数据.之后通过对高分遥感影像与DSM数据进行像素级的数据融合,便于后续进行特征提取[7].
接下来分别对融合后的遥感影像数据提取颜色(光谱)特征,纹理特征及邻域空间特征,并将其组合作为训练样本的特征属性.
其中融合后的数据可看作具有4个波段的高分辨率遥感影像,可分别记作(IR, R, G, h),并将归一化处理后的该四个波段的值看作数据的光谱特征FC.
(1) 基于灰度共生矩阵的纹理特征提取.纹理是遥感影像的一种重要的空间特征,反映了物体的深度和表面信息,表达了物体表面颜色和灰度的某种变化,由该像元与其周围像元的分布情况决定,是光谱特征的一个重要补充[8].基于统计方法的灰度共生矩阵(gray level co-occurrence matrix, GLCM)纹理提取方法,通过研究像元与像元之间的空间分布特性来描述纹理,简单、易于实现且具有较好的适应性.本文采用GLCM方法提取遥感影像的纹理特征.
灰度共生矩阵定义为在θ方向上,间隔距离为d的一对像素,其灰度值分别为i和j的概率记为P(i,j;d,θ).设一幅M×N大小的二维图像f(x,y)的灰度量化为Ng级.则灰度共生矩阵P(i,j;d,θ)可表示为:
式中:#(z)为集合z中元素的个数;θ为方向参数,通常选取0°,45°,90°和135°这4个方向.在可通过灰度共生矩阵计算得到的共14个特征中,只有角二阶矩、熵、对比度、和相关性这4个特征之间不相关,且对纹理有具有较好的表达.于是选取这4个特征作为提取的纹理特征:
① 角二阶矩(Angular Second Moment, ASM).
角二阶矩反映了影像灰度分布的均匀和纹理的粗细程度,影像纹理较细致、灰度分布较均匀时ASM值较大.
② 熵(Entropy)
熵表征影像纹理的随机性,纹理越复杂则熵越大.
③ 对比度(Contrast)

对比度反映图像的清晰度和纹理沟纹的深浅,对比度越大说明影像中纹理沟纹越明显.
④ 相关性(Correlation)
相关性反映某灰度值在特定方向上的延伸,表征的是纹理的走向.
本文选择距离参数d=1,方向参数θ为0°、45°、90°和135°四个方向所得到的灰度共生矩阵,并将分别计算得到的4个特征的均值作为纹理特征FT,即:

(2) 基于双边滤波的空间邻域特征提取.由于像元特征的单一性,无法有效地提取建筑物等,空域滤波主要是应用滤波模板对每个像元的邻域进行卷积处理来实现的.但一般的空域滤波例如均值滤波和高斯滤波,在引入邻域空间信息的同时也会导致影像不同程度的模糊,影响边缘特征的表达.本文根据建筑物边线特征明显的特点采用具有良好边缘保持特性的双边滤波来进行空间邻域特征的提取.
双边滤波器是以高斯滤波器为基础的保边去噪滤波器,经过双边滤波器滤波输出的像素值g(i,j)可以表示为
式中:f(k,l)为滤波前滤波窗口内邻域点的像素值;w(i,j,k,l)为加权系数,可以看作由两个高斯核函数(空间高斯核d(i,j,k,l)与亮度高斯核r(i,j,k,l))相乘来得到[9]:
w(i,j,k,l)=d(i,j,k,l)·r(i,j,k,l).
其中空间核表示为
亮度核表示为
可以发现,由于亮度核r(i,j,k,l)的影响,在像素亮度值差异大的地方(边缘),其权重值会变小,滤波效果相应降低,达到边缘保持的高斯滤波效果.
本文对数据的每个波段分别进行双边滤波处理,参数选择σd=20,σr=1.5,将滤波后的结果作为影像的空间邻域特征FS.
2.2融入高层语义特征的SVM建筑物提取
对于识别图像中的建筑物,人类是通过对图像中的信息进行抽象概括,得到高层的语义特征来进行判断的[10].高层的语义特征可以看作低层特征的组合,从低层到高层越来越抽象,也就越来越能表达语义的描述,对于建筑物提取来说,最高层的语义就可以认为是能进行“是建筑物”或“不是建筑物”这样最后判断的特征.从这个层面来看,经过低层特征(光谱特征,纹理特征,空间邻域特征)组合,并由SVM分类判别出的结果(是否是建筑物),便可看作对于建筑物判别最抽象的一维高层语义特征[11].从整个图像的宏观角度来看,由于SVM[5]直接的判决结果中,每个像素的判决相对孤立,整体散乱并存在误判,所以将其进行滤波后的结果作为能比较有效识别建筑物的高层语义特征.将该特征加入之前的特征集合中,与其他的低层特征融合作为新的建筑物特征再次进行SVM建筑物分类.实验结果表明,融合高层语义特征后能有效提高建筑物提取的正确率.
整个提取算法流程如图2所示.

图2 算法流程图Fig.2 Flow chart of the algorithm
具体步骤如下:
Step 1 将提取的光谱特征FC、纹理特征FT以及空间邻域特征FS进行特征融合得到特征向量集合F1:

Step 2 根据目视解译随机选取训练样本点.
Step 3 通过SVM对所选的训练样本进行训练.
Step 4 通过训练得到的分类器对测试样本进行判别,得到初次SVM判决结果.
Step 5 对初次SVM的判决结果进行均值滤波,将滤波后的结果作为高层语义特征FN,加入到原有的特征向量集合中得到新的特征向量集合:

Step 6 再次进行SVM分类判决,得到最终建物判决的结果.
3 实验结果及分析
本文实验数据选取来自国际摄影测量与遥感学会(ISPRS)的“城市分类与3D重建测试项目”中德国的Vaihingen地区数据集.其中高分辨率遥感影像包含“近红外、红、绿”三个波段,空间分辨率为8 cm.相匹配的DSM数据的空间分辨率为9 cm.
分别从德国的Vaihingen地区数据集中的区域1和区域3中选取了1 000×1 000大小的高分辨率遥感影像以及与之匹配的DSM数据进行实验.其中区域1是Vaihingen地区的城市中心区域,建筑物密集且形状较为复杂;区域3主要是居民区,建筑物分布较均匀,间隔较小.图3展示了区域1和区域3的伪真彩图和DSM深度影像.
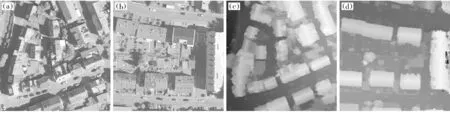
图3 德国Vaihingen地区高分辨率遥感影像Fig.3 High-resolution remote sensing image of Vaihingen, German(a)—区域1伪真彩图; (b)—区域3伪真彩图; (c)—区域1DSM数据; (d)—区域3DSM数据.
实验中随机选取建筑物和非建筑物训练样本各500个,其余点作为测试样本,SVM训练核函数为径向基函数,通过10折交叉验证选取的惩罚因子C和核函数参数σ分别为
所有实验的仿真环境为MATLAB2014a,实验平台是处理器为Intel(R) Core(TM) i5-2450M CPU @ 2.50 GHz,主频为2.50 GHz,RAM为8 GB,系统类型为64位操作系统.
图4和图5分别列出了区域1和区域3的建筑物实验结果图.其中图4a和图5a分别是两幅实验图像在未融入DSM数据时,仅通过高分遥感影像进行特征提取后用SVM判别得到的建筑物提取结果;图4b和图5b是融入DSM数据后的SVM判别结果;图4c和图5c是在融入DSM数据的基础上,结合了高层语义特征的SVM判别结果.图4d和图5d是用于评价分类正确率的标准建筑物提取图.
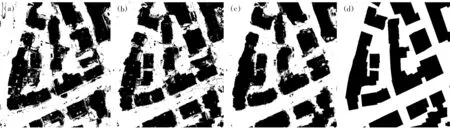
图4 区域1建筑物提取实验结果Fig.4 Extracted results of buildings in area 1(a)—未融入DSM数据; (b)—融入DSM数据; (c)—加入高层语义特征; (d)—标准图.
从图4和图5中可以看出,在未融入DSM数据时,建筑物提取效果较差,很多建筑物都存在提取不完整的情况,孤立误判的杂乱点也较多;在融入DSM数据后,明显地提升了建筑物的提取结果,可以看出比较完整的建筑物整体,但仍有一些孤立散乱的误判点使得整个提取效果显得不够清晰;而在加入高层语义特征之后,可以看出整体的建筑物提取正确率进一步提高,建筑物的整体轮廓也更加清晰.
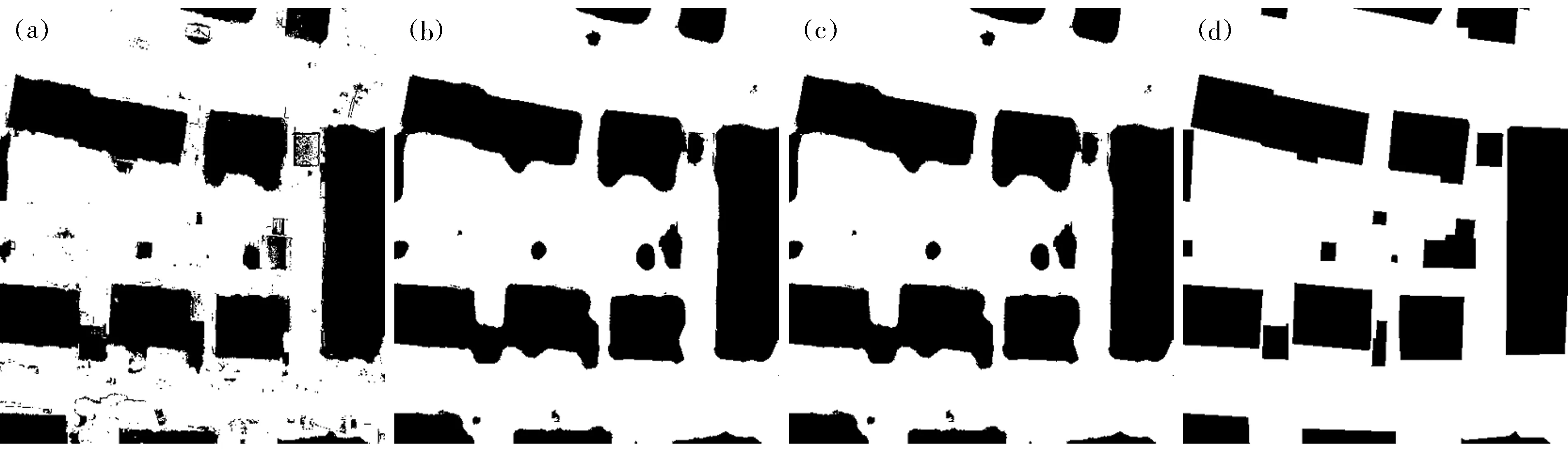
图5 区域3建筑物提取实验结果Fig.5 Extracted results of buildings in area 3(a)—未融入DSM数据; (b)—融入DSM数据; (c)—加入高层语义特征; (d)—标准图.
为了定量评价本文所提出的算法,采用建筑物提取完整率以及建筑物提取正确率[12]两个指标来综合评价建筑物提取效果.对于每一个像素点是否是建筑物的判决结果有4种情况,分别对像素点进行统计,记:
TP(True Positive):建筑物被判断为建筑物的像素点个数;
FP(False Positive):非建筑物被判断为建筑物的像素点个数;
TN(True Negative):非建筑物被判断为非建筑物的像素点个数;
FN(False Negative):非建筑物被判断为建筑物的像素点个数.
建筑物的提取完整率定义为
建筑物提取正确率定义为
表1和表2分别展示了区域1和区域3的建筑物提取完整率和正确率.
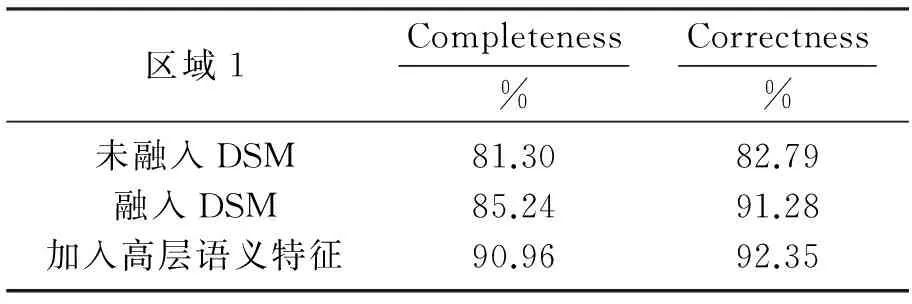
表1 区域1建筑物提取完整率和正确率
从表1和表2可以看出,融入DSM数据后明显提升了区域1的建筑物提取完整率从82.79%到91.28%,加入高层语义特征后,虽然没有明显提高建筑物提取的完整率,但建筑物提取的正确率得到提升,建筑物提取的整体效果得到改善,这也与图5所示的实验结果相符,表明加入高层语义特征可以有效提高建筑物的提取效果.对于区域3,由于该区域建筑物分布更为规则和均匀,种类也比较单一,在融合DSM后已经达到了较好的建筑物提取效果,加入高层语义特征使其提取效果得到了进一步提高.
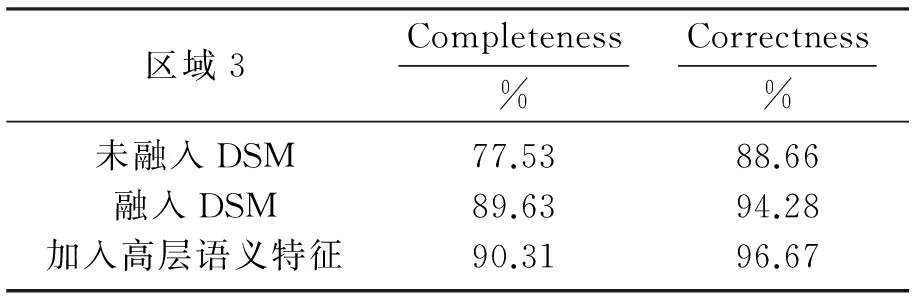
表2 区域3建筑物提取完整率和正确率
4 结 论
本文提出的基于多特征融合的SVM高分遥感影像建筑物提取算法,有效地融合了像元的光谱、纹理、空间邻域等低层特征和SVM判决得到的高层语义特征,实现了对高分辨率遥感影像建筑物的有效提取.通过实验验证,本文提出的方法从视觉效果和结果的数据评价上都取得了明显的提升,但仍存在一些问题与不足,后续考虑通过形态学滤波等操作进一步改善提取结果.
[ 1 ] BOLTER R,LEBERL F. Detection and reconstruction of buildings from multiple view interferometric SAR data[C]∥IEEE 2000 International Geoscience and Remote Sensing Symposium, 2000(2):749-751.
[ 2 ] EKHTARI N,ZOEJ M J V,SAHEBI M R,et al. Automatic building extraction from LiDAR digital elevation models and Worldview imagery[J]. Journal of Applied Remote Sensing, 2009,3(1):2701-2712.
[ 3 ] SOHN G,DOWMAN I. Data fusion of high-resolution satellite imagery and LiDAR data for automatic building extraction[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2007,62(1):43-63.
[ 4 ] KABOLIZADE M,EBADI H,AHMADI S. An improved snake model for automatic extraction of buildings from urban aerial images and LiDAR data[J]. Computers Environment & Urban Systems, 2010,34(5):435-441.
[ 5 ] VAPNIK V,LEVIN E,CUN Y L. Measuring the VC-dimension of a learning machine[M]. Cambridge, MA: The MIT Press, 1994:851-876.
[ 6 ] 张学工. 关于统计学习理论与支持向量机[J]. 自动化学报, 2000,26(1):32-42. (ZHANG X G. Introduction to statistical learning theory and support vector machines[J]. Acta Automatica Sinica, 2000,26(1):32-42.)
[ 7 ] LAFARGE F,DESCOMBES X,ZERUBIA J,et al. Automatic building extraction from DEMs using an object approach and application to the 3D-city modeling[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2008,63(3):365-381.
[ 8 ] 刘丽,匡纲要. 图像纹理特征提取方法综述[J]. 中国图象图形学报, 2009,14(4):622-635. (LIU L,KUANG G Y. Overview of image textural feature extraction methods[J]. Journal of Image and Graphics, 2009,14(4):622-635.)
[ 9 ] TOMASI C,MANDUCHI R. Bilateral filtering for gray and color images[C]∥International Conference on Computer Vision. IEEE, 1998:839.
[10] 罗世操. 基于深度学习的图像语义提取与图像检索技术研究[D]. 上海:东华大学, 2016. (LUO S C. Image semantics extraction and retrieval based on deep learning[D]. Shanghai: Donghua University, 2016.)
[11] 徐侃,杨文,陈丽君,等.利用主题模型的遥感图像场景分类[J]. 武汉大学学报:信息科学版, 2011,5:540-543. (XU K,YANG W,CHEN L J,et al. Satellite image scene categorization based on topic models[J]. Geomatics and Information Science of Wuhan University, 2011,5:540-543.)
[12] TURKER M,KOC-SAN D. Building extraction from high-resolution optical spaceborne images using the integration of support vector machine(SVM) classification, hough transformation and perceptual grouping[J]. International Journal of Applied Earth Observation & Geoinformation, 2015,34(5):58-69.
BuildingExtractionofHighResolutionRemoteSensingImageBasedonMultipleFeaturesFusionSVM
ZhaoChunhui,LiSicong
(College of Information and Communication Engineering, Harbin Engineering University, Harbin 150001, China)
Gray level co-occurrence matrix and bilateral filtering method was used to extract the low-level features and then SVM classifier was applied to get the high level semantic feature. The low-level features and high level semantic feature were merged together, and fed to SVM classifier to further extract buildings. Experimental results show that the completeness and correctness of building extraction of the proposed algorithm are improved obviously.
high resolution remote sensing image; building extraction; SVM; DSM; semantic feature
TP 751.1
: A
【责任编辑:李艳】
2017-04-24
国家自然科学基金资助项目(61405041,61571145); 黑龙江省自然科学基金重点项目(ZD201216); 哈尔滨市优秀学科带头人基金资助项目(RC2013XK009003).
赵春晖(1965-),男,黑龙江汤原人,哈尔滨工程大学教授,博士生导师.
2095-5456(2017)04-0311-06
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
软件(2020年3期)2020-04-20 01:45:18
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
自动化学报(2018年7期)2018-08-20 02:59:04
Coco薇(2017年8期)2017-08-03 15:23:38
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
周口师范学院学报(2016年5期)2016-10-17 06:36:47
