
无人机本体调校测试系统设计与应用实践
2017-09-15 07:50赵昌丽朱雅乔
时代农机 2017年7期
赵昌丽,朱雅乔
(天津中德应用技术大学 航空航天学院,天津 300350)
无人机本体调校测试系统设计与应用实践
赵昌丽,朱雅乔
(天津中德应用技术大学 航空航天学院,天津 300350)
针对无人机应用技术类专业实验实训教学环节涉及的飞行配平、响应测试及飞控校准等测试工作,设计了摇臂单点吊装式结构,开发了四通道平台校准测试系统,能够实现对垂直起降无人飞行器俯仰、滚转、偏航及高度四路电调及平台飞控的性能测试,给出了飞控性能数据,量化了平台的装调差异度,从而指导装调人员渐序优化平台飞控,为控制系统诊断与参数整定建立了数据支撑。与传统人工方式相比,采用该测试平台进行的无人机装调工作,操作安全性更好,调校效率更高,且不受室内外天气环境制约,为无人机系统装调、维护及实训教学提供了技术支撑与平台保障。
实训教学;无人机;系统装调;飞行操控
1 背景
近年来无人机行业发展迅猛,飞行器拥有者数量激增,以无人机作为应用平台的航空拍摄、农林植保、警务查打、灾后搜救等各领域对于飞行器驾驶者需求的缺口巨大,西安航空职业技术学院、长沙航空职业技术学院、天津现代职业技术学院、天津中德应用技术大学等院校先后开设了无人机应用技术专业,旨在培养无人机装调、维护与操纵等方向的技能型人才。
天津中德应用技术大学的无人机应用技术专业开设了飞行原理、无人机构造与系统、无人机控制系统等理论课程及无人机整机组装与调试、无人机飞行实训等实训课程。理论课程采用理实一体化教学模式,将实验课程融入理论教学中,该校购置了多台小型固定翼、旋翼无人机用于实验实训的教学。尽管现行的实训环节确实对实践能力的提升作用显著,但也存在以下问题:①装调错失导致输出力矩错误,直接试飞易造成炸机、失控等危险状况,存在巨大安全隐患;②试飞操纵补救不利,易造成机体部件损坏,教学成本高;③试飞需要安全防护设施布设,场地条件高;④人工试飞没有准确的数据反馈,调试难度大,测试周期长,时间成本高;⑤易受天气、风速、温度等影响,环境因素制约明显。
因此,针对以上问题,有效保障实训环节人机安全、降低材料成本、提高装调效率是当前该实训教学环节亟需解决的问题关键。
2 基本思路
针对无人机飞行操纵与控制训练,国内很多院校都开展了实验平台的研究设计工作。中国石油大学设计了一种基于Odroid的四旋翼无人机实验教学平台,解决了机电一体化技术多门课程内容创新实践教学应用的问题,海军航空工程学院针对无人机训练缺乏实装、费用高、风险大等问题,采用半实物仿真方式,设计了一种无人机模拟训练系统。天津大学为了能够快速验证飞行控制器控制算法的性能,研究开发了四旋翼无人机可视化半实物仿真平台,一定程度上提高了飞控算法开发的效率。东北电力大学为增强自动化专业学生的创新思维和综合创新能力,设计了四旋翼飞行器实验平台,并取得了丰硕的实践教学成果。针对无人机维修保障人员的技能培训,设计了基于多智能体的维修训练仿真系统。此外,开放式多功能飞机模拟训练器在民航客货运航空器实践教学方面的改革探索为无人机的实训教学平台建设工作提供了良好借鉴。
结合该校实际情况,课题组设计了一种兼容直升机无人机与多旋翼无人机的测试平台,安装结构简单,装调后整机直接安装于连接处,无需其他链接机构与改装;通过合理的结构设计实现俯仰、滚转、偏航及高度四个通道的检测,并与飞控传回的四通道角度信息对比,得出对电调及飞控校准的测试结果;结合给定的控制算法分析接收机四通输入与平台输出,示出输入输出曲线,易于对各通道的控制性能进行直观掌握,从而指导装调人员进一步优化飞控控制参数。
3 平台设计
3.1 结构及组成
平台系统如图1所示,由四通道运动机构、四通道检测装置、数据采集系统、数据处理与分析系统、无线通信系统、电源系统组成。
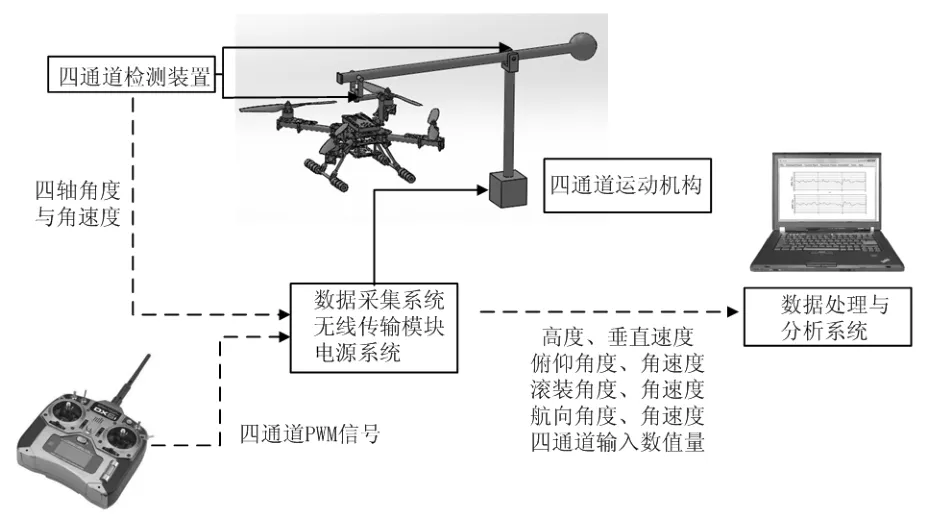
图1 平台系统结构图
(1)四通道运动机构。四通道运动机构包括底座、支撑杆、连接部、配重装置、三轴运动机构、无人机安装结构。底座采用不锈钢或铝框架结构,底部通过配重,中心稳定能够支持无人机在飞行过程中带来的转动惯量。框架间有足够的空间安放检测线路、无线通信系统和电源系统的组件。支撑杆采用不锈钢材质,可根据测试需求调节高度。连接部为单轴轴承,控制配重横杆垂直方向转动,提供无人机垂直高度变化时的运动,并通过安装限位块,限制飞行高度变化附件安装编码器,测量角位移与角速度。配重装置包括配重块与横杆,配重块用于平衡掉横杆与三轴运动机构自重,保证无人机垂直通道没有其他干扰,配重块中空穿过横杆,可以调节位置并通过螺钉固定,以保持横杆平衡。三轴运动机构通过三关节轴承,承载无人机俯仰、滚转及偏航的运动,附件在各轴安装编码器,用于测量各轴的角位移与角速度。无人机安装机构通过四点与无人机中心板固定,实现机体中心稳定,有效避免了影响螺旋桨叶的运动。
(2)四通道检测装置。通过安装在四个轴关节的编码器,检测四轴的角位移与角速度,从而实现对无人机俯仰、滚转、偏航及高度运动的检测,通过无线传输模块输送至数据监控与分析系统进行分析,与飞控内部传感器测得数据进行比较,检测飞控是否校准正确。
(3)数据采集系统。平台端信号采集系统用Arduino单片机作为数据采集组件,接收检测装置发来的角位移与角速度信号,并将连接部的角位移与角速度信息转换为高度与速度信息,将俯仰通道角度变换同时配置同型号的接收机接收来自遥控器的四通道PWM信号,输送至单片机,由单片机处理为数值信号,最后由无线通信模块将以上信号统一发送至主控计算机。
(4)数据处理与分析系统。远端计算机通过无线通信模块接收来自平台端与飞控端的信号,比较平台与飞控的三通道角度及高度变化,检测飞控的加速度计与磁罗盘是否校准正确,同时将遥控器接收机端传来的输入信号与输出信号进行比较,绘制曲线,检测各通道控制效果,并提出各通道控制参数的优化建议。
(5)无线传输模块。无线传输模块一部分采用蓝牙实现,主要负责将平台端的单片机信号送至主控计算机,另一部分采用无线数传安装于无人机飞控,将飞控数据输送至主控计算机。
(6)电源系统。电源系统主要为平台端信号采集系统、无线电传输系统提供5V供电,设计为锂电池与电源模块两种供电形式,便于室内与室外测试环境。
3.2 一般性工作方式
平台系统可根据无人机应用技术专业不同课程的侧重要求,作为教学辅助装置不同程度地被使用,平台系统的一般性工作方式如下。
(1)模块一:基础调试。启动前调解配重块,使横杆平衡,将组装好的无人机通过平台上的无人机安装结构与测试平台连接,开始机体结构安装检测。通过施加外力使无人机与配平装置保持水平,同时观察无人机的机体是否水平,如果机体不处于水平,则表示无人机组装过程中存在没有配平问题,需重新卸下后进行调整,直至无人机机体保持水平。开启电源系统为平台信号采集系统供电,测试人员开启安全开关启动无人机。首先控制遥控器油门通道测试飞机垂直通道响应,观察无人机高度变化。如油门一直增加而无人机无高度变化,则提示建议查看电机与螺旋桨是否安装错误;如油门增加到一定出现姿态或航向变化剧烈,提示建议查看电机或螺旋桨是否安装错误。
(2)模块二:飞控校准测试。控制无人机起飞,分次改变油门、俯仰、滚转通道输入,通过主控计算机对平台检测数据与飞控输出数据进行比较,若不吻合,提示建议查看飞控中加速度计校准是否正确;控制无人机起飞,改变航向通道输入,通过主控计算机比较的平台检测数据与飞控输出数据进行比较,若不吻合,提示建议查看飞控中磁罗盘校准是否正确;控制无人机起飞,分别改变四通道输入,主控计算机绘制输入输出曲线,观察无人机各通道相应情况,修改控制律及参数整定。
4 平台应用及教学实践
该校无人机应用技术专业单位课时为4学时/节,理论课程教学活动采用理实一体化形式开展,依据课程情况设计安排约1/2或1/3时间的实验实训环节,实训课程则以实操训练为主,涉及应用该平台的相关课程情况如表1所示。

表1 相关课程情况
(1)理论课程的实验验证。无人机构造与系统为无人机专业学生的专业基础课程,该课程主要包含无人机的飞行原理和翼型设计、无人机机体结构、无人机动力装置、无人机电子设备等主要内容,使学生掌握其无人机的结构及各系统的组成与工作原理,为进行实际维护工作及故障诊断打下基础。飞行原理与翼型设计是该课程的难点之一,以此为例,单一的讲解方式无法使学生直观理解翼型对气动力的影响,利用该无人机实验平台在安全飞行环境下,通过更换不同翼型的螺旋桨叶,对比呈现不同的飞行操控效果,易于学生总结翼型对无人机气动力的影响因素。
无人机控制技术为无人机专业学生的专业技术课程,该课程主要由包含旋翼无人机动力学模型、运动学模型,基于气压计的起降高度控制、基于GPS的水平运动控制和基于视频流的姿态控制,以及基于PID控制、鲁棒控制等内容,使学生掌握无人机机体建模、常用无人机控制策略及算法。以控制器设计与参数整定环节为例,常规的理实一体教授方式多以仿真验证进行穿插,实体呈现性不强,而采用该平台的实践环节,将或设计或优化的控制算法载入飞控,通过输入输出数据采集与对比,可较好地分析控制器的实体平台控制效果,便于分析控制策略与算法优劣,在控制律设置存有缺陷时,因平台的刚性约束,可有效保障人身与机体的安全。
(2)实训课程的实操训练。实训课程服务于专业技术课程,为前续所学知识的系统掌握与运用所设立的集中环节,为使课程贴近生产实际,采用项目引导、任务驱动、分组实施、独立考核的教学方式进行。
无人机整机组装与调试课程为无人机应用技术专业学生的专业实训课程,该课程为无人机构造与系统课程的延伸实训,采用小型四旋翼无人机作为组装与调试的实训设备,通过整机构成与信号传输、动力套装配置、电机电调校准、飞控安装与调校、飞行前测试、试飞等五项任务,实现学生对电动无人机整机结构认知、供电与信号传输关系、动力套装配置约束、飞控传感器校准与调参等知识与技能的熟练掌握。其中飞控安装与校准、试飞前测试等为该课程的实施难点,主要体现在试飞场地受限,人机安全需要保障;师生比相对较低,串行指导无法兼顾全员;缺少数据支撑的人工感知校准,调校效率低下。无人机本体调测系统的应用有效改善了以上环节,采用的刚性连接方式,提供了安全测试环境;加装的悬臂吊装结构,减少了设备损耗成本;给出的通道参数检测,提高了飞控调测效率。
视距内飞行训练为无人机应用技术专业技能实训课程,视距内飞行主要采用小型四旋翼与直升机作为实训设备,通过起飞、悬停、降落、四边飞行、八字飞行等科目的训练,使学生掌握基本的飞行技能。其中起飞、悬停与降落为飞行的基础技能,同时也是学员操作需要突破的难点。对于初学者,一般采用教练线的方式,对于只有1~2名教员的课堂,这种方式严重影响了教学进度,因此,平台的应用实施了一种安全的训练方式,通过物理限位实现了一定范围内的通道飞行训练,通过配重调节消除了系留姿态,同时通过上位机显示操控输入与输出数据,也为学员飞行训练提供了数据指导。
(3)科技创新活动。无人机本体调校测试系统在学生科技创新活动中也起到了良好的辅助测试作用。该校航模社团学生2016年6月参加了航职委举办的首届“全国职业院校无人机应用创新技能大赛”并荣获全国第一名,随后2016年10月参加了华北五省机器人大赛,荣获“空中机器人项目”天津赛区一等奖和华北赛区二等奖的优异成绩,两次比赛中,该平台在飞控的稳定性与操控性调试、无人机载重比配置选型等工作中为学院参赛队员提供了可靠的数据依据及安全的测试环境。
5 结语
面向无人机驾驶者飞行技能实训教学环节存在的问题,开展了飞行器实训平台设计工作,形成了“操作安全、操控真实、调校量化”的无人机调校测试实训平台,改变了以往实训“测试欠安全、教学成本高、调测时间长”的面貌。经过两轮小规模试行实践,获得了无人机应用技术专业教学双方的良好反响,并已与对口飞行器控制器生产商达成了初步合作意向,拟对平台系统的飞控参数反馈组件进行优化,可为更广泛的无人飞行器爱好者、飞行测试从业人员、甚至产品商进行机体调校提供有益帮助。
[1]毕凯,李英成,丁晓波,等.轻小型无人机航摄技术现状及发展趋势[J].测绘通报,2015,(3):27-31.
[2]何勇,张艳超.农用无人机现状与发展趋势[J].现代农机,2014,(1):1-5.
[3]吴强.警用无人机引发的现实思考[J].中国人民公安大学学报,2015,(2):29-32.
[4]雷添杰,李长春,何孝莹,等.无人机航空遥感系统在灾害应急救援中的应用[J].自然灾害学报,2011,20(1):178-183.
[5]赵新杰,马林旭.理实一体化课程考核方法改革的探索与实践[J].天津中德职业技术学院学报,2015,(2):32-35.
[6]罗偲,纪仁杰,韩彬,等.基于Odroid四旋翼无人机教学平台设计[J].实验技术与管理,2016,33(11):165-167.
[7]于进勇,寇昆湖,陈勇,等.无人机模拟训练教学系统设计[J].实验室研究与探索,2014,33(7):221-224.
[8]张垚,鲜斌,于琰平,等.四旋翼无人机可视化半实物仿真平台研究[J].仪器仪表学报,2012,33(11):2572-2.
[9]冯玉昌,门洪,史冬琳,等.四旋翼飞行器多功能实验平台设计[J].实验技术与管理,2015,32(4):98-101.
[10]陈勇,鹿珂珂,张春平,等.基于多智能体的无人机维修训练仿真软件设计[J].实验技术与管理,2016,33(7):133-135.
[11]樊志勇,王娟,王勇.多功能飞机维护训练器的建设和教学实践[J].实验技术与管理,2014,31(12):182-184.
[12]王娟,樊志勇,张文林,等.“开放驾驶舱”工程平台的建设和实践教学探索[J].实验技术与管理,2016,33(7):166-169.
天津中德应用技术大学2016年教学改革与建设项目(2016-22)。
赵昌丽(1986-),女,山东无棣人,硕士,工程师,主要从事无人飞行器控制系统理论与实训教学研究工作。
猜你喜欢
幽默大师(2020年11期)2020-11-26
装备制造技术(2020年12期)2020-05-22
民用飞机设计与研究(2019年2期)2019-08-05
摄影之友(影像视觉)(2019年3期)2019-03-30
摄影之友(影像视觉)(2019年2期)2019-03-05
摄影之友(影像视觉)(2018年12期)2019-01-28
测控技术(2018年8期)2018-11-25
中国公共安全(2017年7期)2017-10-13
计算机测量与控制(2017年6期)2017-07-01
计算机测量与控制(2017年6期)2017-07-01
