
基于PLC的机械/静压复合传动箱控制系统探析
2017-09-15 07:50李新亭
时代农机 2017年7期
李新亭
(淄博职业学院,山东 淄博 255314)
基于PLC的机械/静压复合传动箱控制系统探析
李新亭
(淄博职业学院,山东 淄博 255314)
随着现代化建设的发展,工程作业行走车辆承担的任务也越来越多,这样的社会背景下以往的简单传动方式并不能满足社会需求,只有专业运输能力强,才能够适应低速作业且同时保证稳定性,能高效率输出高转速的工程作业行走车辆才能顺应社会发展。文章基于机械/静压复合传动箱工作原理,对机械/静压复合传动箱的背景、研究意义、原理、改进及机械/静压复合传动箱的特点进行分析。
机械/静压复合传动;控制系统
1 当前PLC机械/静压复合传动箱国内外发展对比
(1)国外PLC机械/静压复合传动箱的发展现状。现今,机械/静压复合传动箱技术领域有一些领头军,早前,他们就已经进行机械/静压复合传动箱的研究,在此基础上还生产安装了复合传动箱,用来连接车辆底盘变速箱和驱动桥。然而对机械/静压复合传动箱控制系统的研发并未止步于此,科研人员仍致力于进行进一步的改善。可是目前复合传动箱的控制系统属于国外的封锁技术,这些代表了机械/静压复合传动箱行业世界先进水平的技术却很难被我国所用。
(2)我国机械/静压复合传动箱的发展现状。机械/静压复合传动箱技术传入我国的时间较短,国内的研发技术人员仍然屈指可数。有部分公司仍然坚持引用国外技术而不是使用自我开发的技术,期望通过与国外公司的合作来发展自身。这为我国的机械/静压复合系统发展造成了一些阻碍,所以目前我国此技术仍然处于推广时期,没有大规模的应用。
2 机械/静压复合传动箱控制系统方案设计中硬件及软件设计
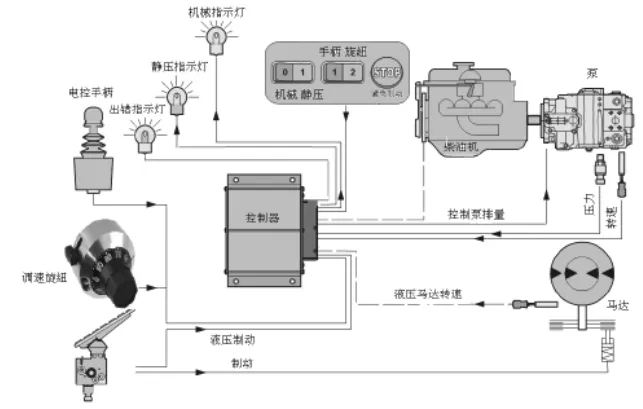
图1 机械/静压复合传动箱控制系统简图
(1)机械/静压复合传动箱控制系统方案设计。由于传动箱安装位置的改变,原车变速箱机构的运用和合理的空间结构安排,机械/静压复合传动箱使车辆运行驱动力路线得以改善,根据这些原理设计机械/静压复合传动箱的控制系统。该系统包括:模式切换、车速控制、传感器信号采集、设计应急电路等。在考虑需要满足工程车辆运作的同时还要保证系统的安全性、稳定性。机械/静压模式切换的运作过程简要概括为:首先根据作业要求,选择相应的切换手柄,动作完成时前离合器操作分离动作,机械/静压模式指示灯灭,信号经前离合器传递给控制器后控制器进行判断,判断前离合器分离是否完成,若分离完成,控制器发出拨叉1动作信号,并接受齿轮咬合信号DTI,成功接收后发出拨叉3动作信号DT3,整个切换过程完成。其中DT2用于调整接受咬合信号失败过程。如图1所示。
(2)机械/静压复合传动箱控制系统硬件设计。为了实现安全性和稳定性,需要合理的硬件设计,包括:系统中变量泵、定量马达、控制器、传感器、切换开关、电控手柄等选择。变量泵使用A4VG56EP2,这是一种德国较为成熟的力士乐元件。由于它的排量和比例阀二次压力呈正相关,工作电流在允许范围内与泵排量成正线性相关,因此通过控制比例阀电流大小来控制液压系统功率的自我调节。定量马达选择A4FM125型,其公称压力、峰值压力、最大转速、最大流量都较为适宜。控制器选用PLC,因为它具有更稳定的性能、更成熟的技术和更高的性价比等特点。传感器为SWITRONIC公司的1273型微动开关。信号指示灯则选用较为普遍的发光二极管。由于KP型电控手柄较易操作,防护等级较高,因此选用其作为电控手柄。
(3)机械/静压复合传动箱控制系统软件设计。软件设计包括设计控制系统主流程,设计机械/静压复合传动箱控制系统软件。主流程需要完成系统自我检测、切换子流程、控制子流程等,使整个系统处于有序状态。软件设计主要是编程语言设计,使用STEP7-Micro软件设计,语句表、梯形表、功能块图编辑器为其提供的语言。
3 机械/静压复合传动箱的优势
(1)车辆行进中对路况适应能力的改善。在运输时,同步碎石封层车需要较高的道路行驶速度;在作业情况下则需要一边行走一边进行作业,此时车辆要在保证行驶稳定性的同时进行低速行驶。而沥青撒布车在边行走边进行沥青撒布的时候,车辆的行驶速度范围为3~20km/h,这也是为了保证沥青撒布的均匀性和良好的作业质量。在这种情况下,对作业中的车辆行进速度和减速的要求显得较为严格,而常规工程汽车的各方面硬件设施尤其是底盘在此方面就表现出明显的不足,无法满足这方面的要求。
(2)工程车辆作业稳定性及可调节性的改善。在给普通车辆底盘安装新型传动装置的方案不仅可以顺应工程作业行走车辆在不同运输状况、作业状况时的需求,还符合绿色出行概念。从另一意义上讲,这种新型传动装置在操作方式上并没有很大程度的改变,因此车辆驾驶员可以较为容易地掌握操作方法以及操作要点,从而使该技术较易被人们接受。
4 结语
机械/静压复合传动箱具有能够实现较大范围的低速行驶、结构简单、成本低廉的优势,机械/静压复合传动箱技术必将对实现新型传动装置的应用有着深刻的影响。
[1]朱晓红.一种基于PLC的机械动作仿真系统设计[J].自动化与仪器仪表,2016,(1):59-60.
[2]秘建萍,陈海涛.基于PLC机械手自动控制系统的探究[J].城市建设理论研究:电子版,2016,(13).
[3]王建国,王江江,冯彬,等.基于PLC的机械手设计[J].中国新技术新产品,2017,(5):15-16.
李新亭(1964-),男,副教授,主要研究方向:机械研究与教学。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
建材发展导向(2021年15期)2021-11-05
物流技术与应用(2020年4期)2020-05-06
岩土工程技术(2019年6期)2020-01-06
制造技术与机床(2018年8期)2018-10-09
中国自行车(2018年8期)2018-09-26
制造技术与机床(2018年9期)2018-09-19
制造技术与机床(2017年3期)2017-06-23
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
