两级复合放大箝位步进压电直线电机*
2017-09-12 07:07黄卫清
振动、测试与诊断 2017年4期
韩 路 ,黄卫清,3,王 寅
(1.南京航空航天大学结构力学及控制国家重点实验室 南京,210016)(2.华侨大学机电及自动化学院 厦门,361021)(3.广州大学机械与电气工程学院 广州,510006)
两级复合放大箝位步进压电直线电机*
韩 路1,黄卫清1,3,王 寅2
(1.南京航空航天大学结构力学及控制国家重点实验室 南京,210016)(2.华侨大学机电及自动化学院 厦门,361021)(3.广州大学机械与电气工程学院 广州,510006)
针对尺蠖式电机运行过程中导轨与动子对加工与装配要求过高的问题,提出了一种尺蠖式原理的两级复合放大箝位步进压电直线电机,分析了电机的工作原理,设计了电机箝位机构和总体结构。利用有限元软件对箝位机构进行仿真分析,得到柔性结构的最佳尺寸。制作样机并设计实验,得到了电机的速度特性曲线并进行分析。样机的实验结果证明了该方案的可行性,并且在电压峰峰值为100 V、频率为150 Hz的方波信号激励下,电机的空载速度可达1.23 mm/s,最大推力可达1.6 N。该电机有效降低了驱动器的加工与装配要求,增强了电机运行的稳定性。
直线电机; 箝位机构; 叠层压电叠堆; 驱动足
引 言
近年来,压电材料受到各界的关注,利用压电材料作为驱动的压电驱动器在精密驱动和定位领域也得到了广泛的应用[1-2]。压电直线电机以其结构简单、精度高和能够自锁等优点引起了学者们的重视[3-7]。
国内外对压电直线电机的研究取得了一定的进展,研发了各种类型的电机。其中,尺蠖式压电直线电机以大行程、高分辨率和较大驱动力等特点,受到广泛关注。该类型电机通常具有两个箝位装置和一个驱动装置,通过模仿自然界中蠕虫的爬行方式,即“箝位-驱动-箝位”的运动方式,对压电叠堆微小步距进行累加,从而实现双向步进运动,在微纳米级驱动定位中具有广阔的应用背景[8-9]。目前,国内出现的尺蠖式电机结构多种多样,但多数电机由于压电叠堆的变形量小于现有加工水平下的加工误差,所以很难保持动子与导轨之间的间隙,比较难以实现稳定的尺蠖式运动,其运行的稳定性受到加工误差和装配误差的影响比较大[10]。潘雷等[11]提出一种多足箝位式压电直线电机,通过在原有两个箝位单元的附近各增加一个辅助箝位单元,一定程度上降低了加工与装配精度的要求。但因为增加箝位单元导致了整体结构较为复杂,对各个箝位信号的控制以及操作要求较高。
笔者在文献[12-13]的研究基础上,提出了一种新型结构的两级复合放大箝位步进压电直线电机,利用杠杆放大原理和三角放大原理对压电叠堆的变形量进行放大,并将两个箝位的驱动足尽可能的靠近,有效降低了驱动器对加工与装配精度的要求,具有运行稳定、精度高和行程大等优点。
1 电机工作原理
笔者提出的压电直线电机结构如图1所示,主要由箝位机构(1,2)、驱动机构(1,2,3)、柔性足(1,2)和导轨等组成。其中,驱动机构含有叠层压电陶瓷作为驱动件。
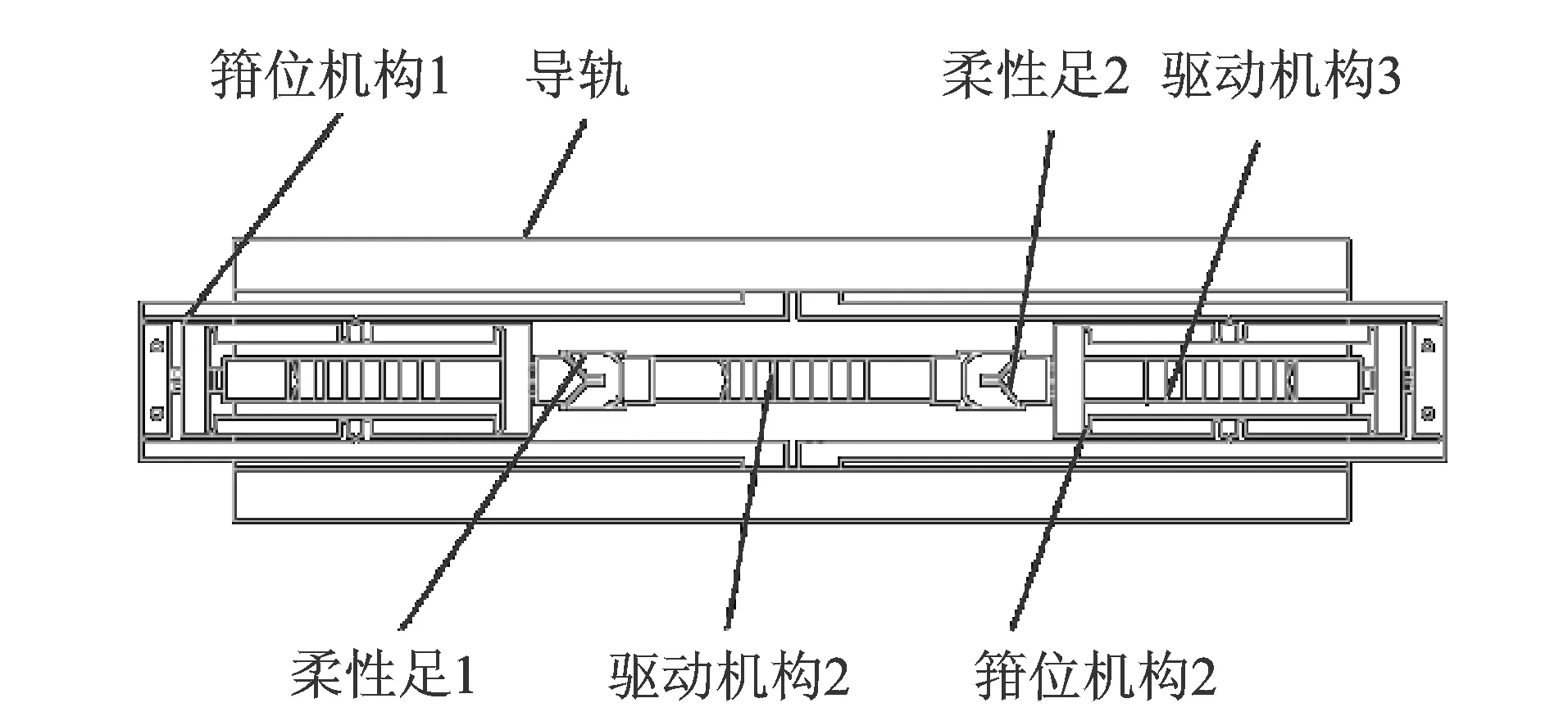
图1 电机整体结构Fig.1 Structure of the motor
以直线动子在导轨内向右运动为例,介绍该电机的运动原理。图2为电机的运行过程图。图中简化了电机结构,每个柔性铰链简化一个支点,阴影部分表示通电状态。初始时动子处于被导轨预压状态。驱动机构1通电伸长推动箝位机构1实现箝位,如图2(a)所示。驱动机构2通电伸长,推动箝位机构2向右步进一个微位移dx,如图2(b)所示。驱动机构1断电缩短,箝位机构1释放箝位,驱动机构3通电伸长推动箝位机构2实现箝位,如图2(c)所示。驱动机构2断电缩短,拉动箝位机构1向右步进一个微位移dx,从而完成一个运动周期。从电机的运行过程看,始终会有一个箝位机构与导轨接触,电机断电后因为初始时导轨与箝位机构之间有预压,所以电机具有自锁功能。此外,电机的输出力直接受到箝位机构与导轨直接的预压力和摩擦因素的影响,所以可以通过调节预压力来调节输出力。
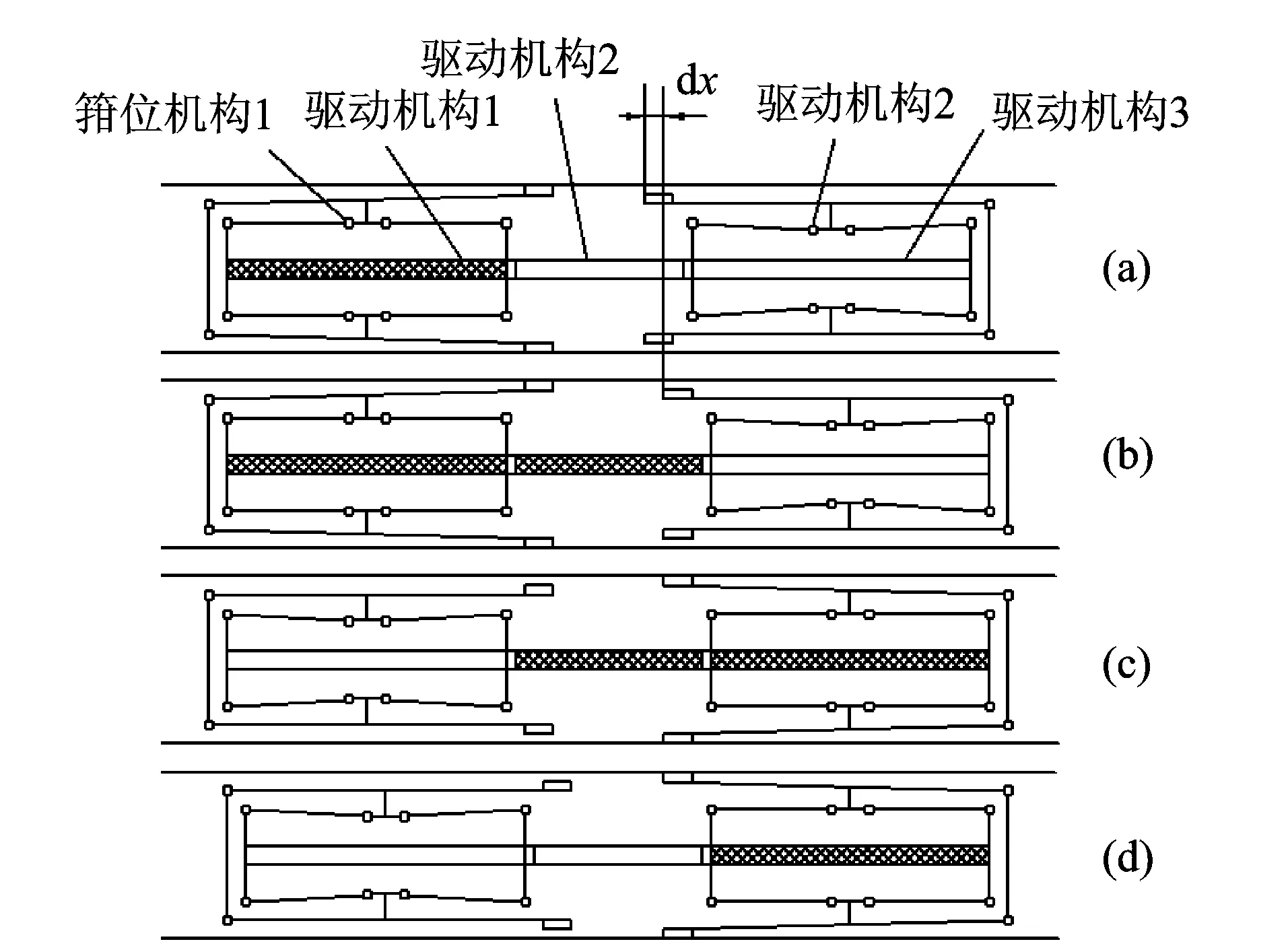
图2 运行过程Fig.2 Process of the operation
由电机的运动原理可以看出,动子两足表面与导轨要实现过盈配合,在运行过程中过盈量在不断变化,而要实现稳定运动,就要求在较大范围内导轨的间距一致并具有较高的平行度。因此,对实际加工精度的要求比较高。
2 电机的结构设计
2.1 电机输出力与电机参数之间的关系
电机输出力是衡量电机性能的重要因素之一。电机输出力F与箝位机构的驱动足和导轨之间的箝位力成正比[11],与驱动机构推动箝位机构所克服的摩擦力成反比。取驱动机构2向右伸长,箝位机构2向右运动为例,设导轨表面摩擦因素为μ,箝位机构与导轨的摩擦力为f,箝位力为P,则F近似为
F=μP-f
(1)
由于驱动足并不是刚体,同时导轨也具有一定的弹性,从而得到箝位力P[12]为
(2)
其中:k1,k2分别为驱动足和导轨的刚度;L为驱动足在压电陶瓷作用下最大变形量。
将式(2)带入式(1),得
(3)
由式(3)可以看出,增大摩擦因数和变形量L都有利于增大电机输出力。增大L需要增大箝位机构放大压电陶瓷变形的放大倍数,这对柔性铰链的刚度有影响。同时,增大放大臂的抗弯系数,对压电陶瓷的刚度要求也会变高。因此,需要合理设计箝位机构的尺寸。
2.2 箝位机构的设计
2.2.1 箝位机构结构设计和放大原理分析
图3为箝位机构与驱动机构装配图。内部的驱动机构主要由压电陶瓷片提供驱动力,一端由螺柱固定,另一端放置一个陶瓷小球,通过螺钉顶住,压电陶瓷片的预紧通过螺钉来调节。箝位机构主要由内部的矩形结构和外部的U型结构组成。U型结构的两个角设计了柔性铰链,矩形结构的4个角和长边也设计了柔性铰链,U型结构和矩形结构通过两个柔性铰链连接。驱动机构安装在矩形结构内,当压电陶片通电伸长,图中A,B面受力扩张,C,D面向外扩张,进而推动U型结构长臂扩张,实现箝位。这种间接的驱动方式可以有效避免压电叠堆垂直于导轨放置时受到的弯矩。

图3 箝位机构的装配Fig.3 Assembly of the clamping mechanism
箝位机构利用杠杆原理和三角放大原理,对压电叠堆的位移进行了放大。首先,介绍利用杠杆原理进行放大。图4为箝位机构外部U型结构的简图,每个柔性铰链简化为一个支点。U型结构在E点受到矩形结构的推力,进而两臂扩张,E点位移为Δx1,F点位移为Δx2,利用三角形相似原理,得到位移放大倍数N1为

(4)

图4 U型结构简图Fig.4 Diagram of the U-shaped structure
图5为内部矩形结构简图。选取一条边做分析,长度为L,当结构水平方向受力移动一个位移Δx3时,在垂直方向则移动一个微位移Δx4。初始时,所分析的边与水平方向的夹角为α,移动后角度变为α-θ,θ为变形量。根据几何关系得到
Δx3=Lcos(α-θ)-Lcosα
(5)
Δx4=Lsinα-Lsin(α-θ)
(6)
由式(5),(6)得到放大倍数N2为

(7)
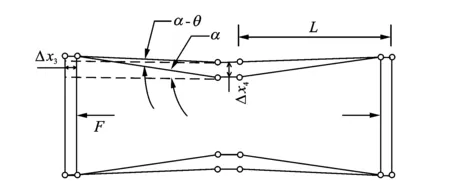
图5 矩形结构简图Fig.5 Diagram of the rectangular structure
由于压电叠堆的位移量只有十几微米,角α的变形量θ也十分微小,根据等价无穷小原理sinθ~θ,1-cosθ~θ2/2,带入式(7)可得

(8)
得到总的放大倍数N为
(9)
可见,放大倍数与L1,L2和α的大小有关,可以改变这3个量来调节放大倍数。
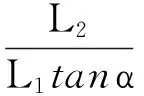
2.2.2 箝位机构有限元分析
在设计箝位机构时,既要保证对压电叠堆的变形有足够的放大倍数,同时也要保证柔性铰链的刚度。采用ANSYS对箝位机构尺寸进行仿真,材料为stainless steel,采用solid45划分网格,图3中A,B两面的中心施加力为150N。图6为箝位机构的一个有限元仿真结果。可以看出,箝位机构对叠堆变形的放大倍数约为9倍,通过式(9)计算得出放大倍数为11,两者结果相差不大,放大倍数基本满足电机运行要求,同时柔性铰链部分的变形不是很大,刚度也满足要求。
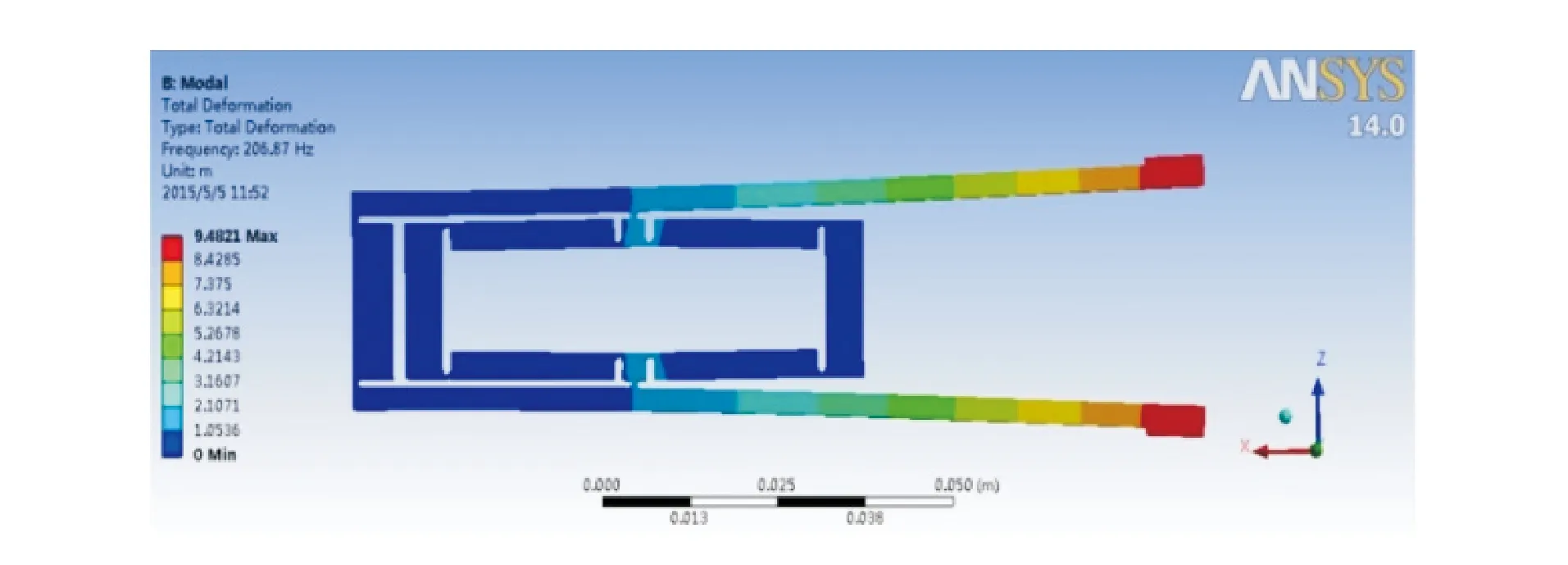
图6 箝位机构有限元分析Fig.6 Finite element method analysis of the clamping mechanism
3 电机实验
笔者试制了原理样机并设计了实验,对电机输出性能进行测试。图7为样机实物图。
图7 样机实物图Fig.7 Picture of the prototype
3.1 驱动足振幅测试
4个驱动足振幅是否一致直接影响电机能否稳定运动。为了测出驱动足的振幅,采用基恩士激光位移传感器测试驱动足的振动位移,用信号发生器产生方波信号(偏置信号),经功率放大器放大至100 V,频率为10 Hz,箝位机构一端由虎钳固定,驱动足一端悬空,用激光打在需要测的驱动足上,如图8所示,采样周期为200 μm。测得的数据如表1所示。
箝位机构均采用相同的结构,压电陶瓷片为同种类型,通过表1数据可以看到,不同的箝位机构驱动足振幅不同,且同一个箝位机构的两个驱动足振幅也有差别,其原因为:a.各个箝位单元压电陶瓷片的预紧不完全相同;b.加工时的误差使箝位机构产生微小变形;c.测试点不同,激光打的位置会有出入,不同的位置对应的放大倍数不同;d.测试有随机误差和系统误差。可以看到,驱动机构的振幅通过箝位机构放大后,其放大倍数约为8倍,小于计算的理论值,原因可能为加工时结构产生了变形。
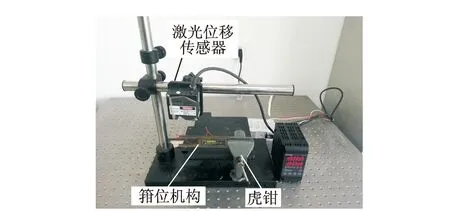
图8 箝位机构驱动足振幅实验装置Fig.8 Displacement response test of the clamping mechanism
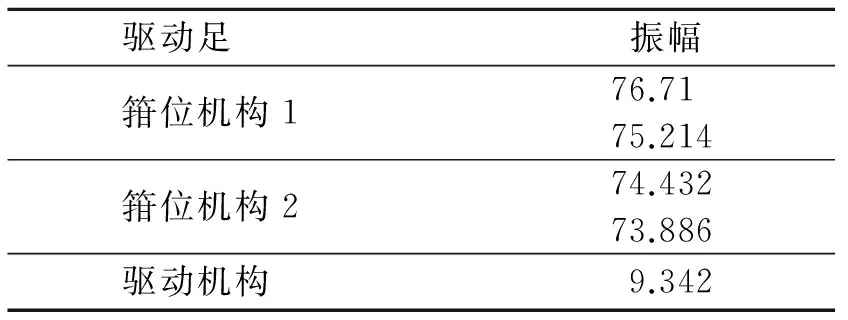
表1 驱动足振幅Tab.1 Amplitude of the driving foot μm
3.2 电机输出特性实验
3.2.1 电机速度与频率之间的关系
实验装置如图9所示,通过信号发生器对压电陶瓷叠堆施加峰峰值为100V的方波信号,在电机空载的情况下,调节驱动信号的频率来测试电机速度和驱动信号频率的关系,如图10所示。可以看出,随着电机工作频率的增大,电机运行速度也增大,这是由于激励频率对压电叠层的振幅影响很小,电机的速度主要取决于激励频率,且速度增加的幅度越来越大,在频率为160 Hz时速度达到最大,之后电机接近停止,其原因为电机结构响应频率不高,由于迟滞效应的影响,电机无法正常运行。
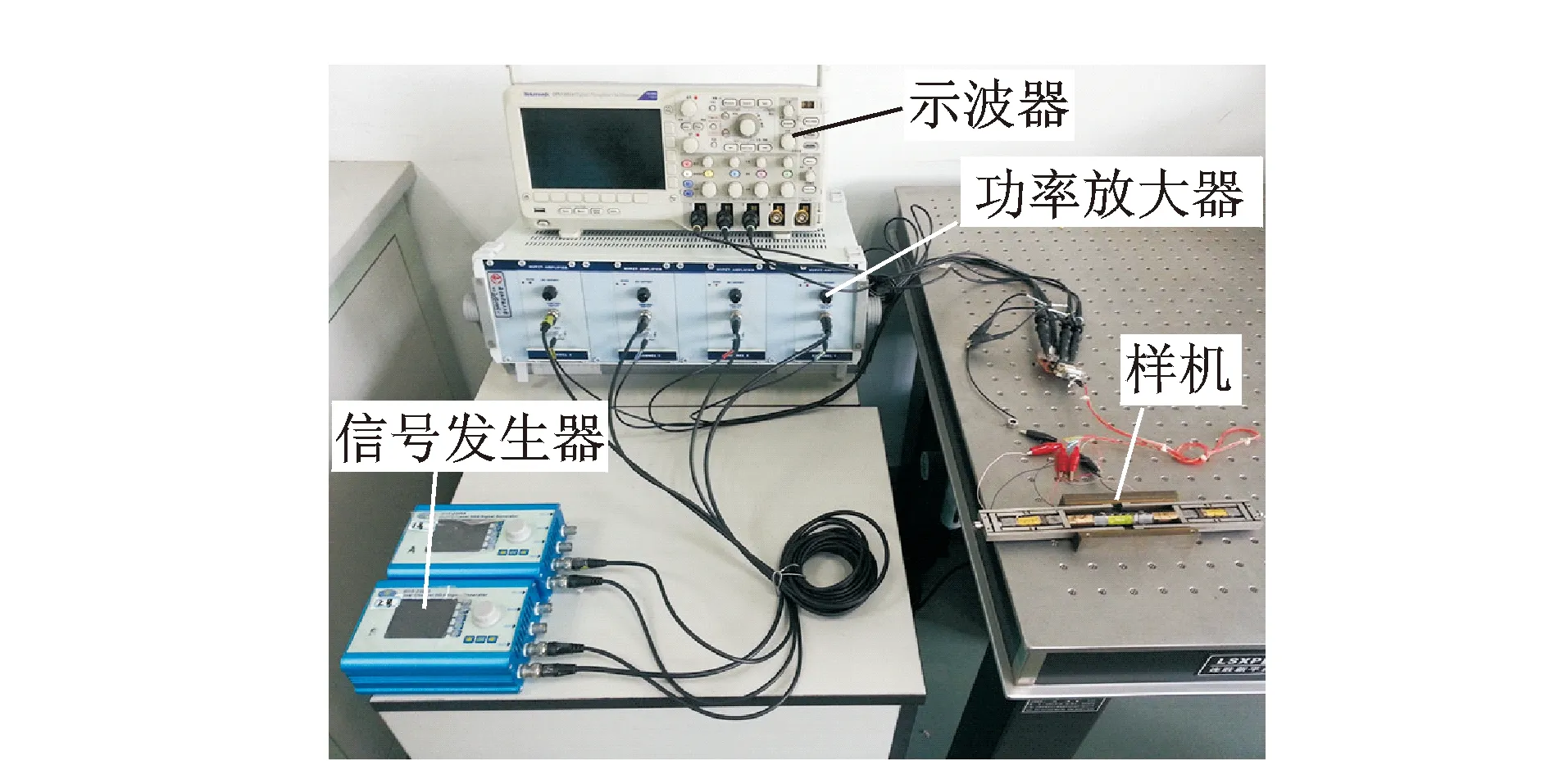
图9 实验装置Fig.9 Experiment device
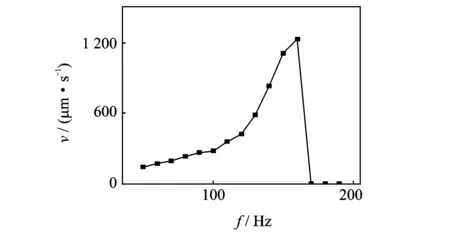
图10 速度-频率关系Fig.10 Relationship between speed and frequency
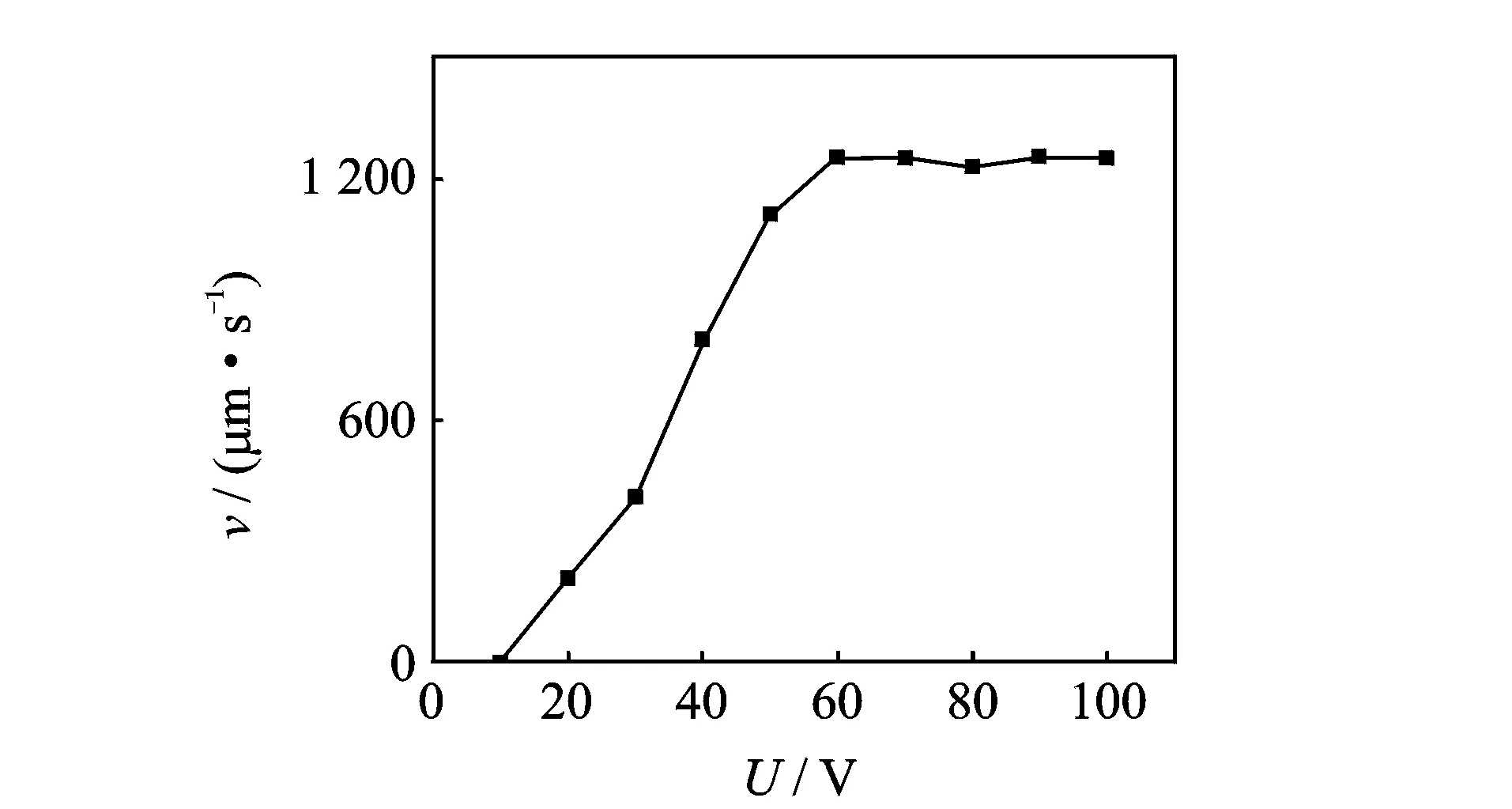
图11 速度-电压关系Fig.11 Relationship between speed and voltage
3.2.2 电机速度与电压之间的关系
激励频率为150 Hz时,改变电压得到电机空载速度的特性曲线,如图11所示。可以看出,电机空载速度随着电压的增加而增加,这是由于陶瓷的输出振幅随电压的增加而增加,频率不变时,每个周期内定子推动动子前进的位移与陶瓷的振幅有关,且振幅越大,动子在一个周期内的位移越大。当电压到60 V时,电机速度趋于稳定,不再增加,这是由于压电叠层的振幅无法随电压增加而继续增大。
3.2.3 电机机械特性
对压电陶瓷施加峰峰值为100 V、频率为150 Hz的偏置方波信号,通过在箝位机构一侧悬挂砝码,测试电机的拉力,实验装置如图12所示。图13为电机的机械特性曲线。电机速度随着负载的增大而减小,最大负载为1.6 N。
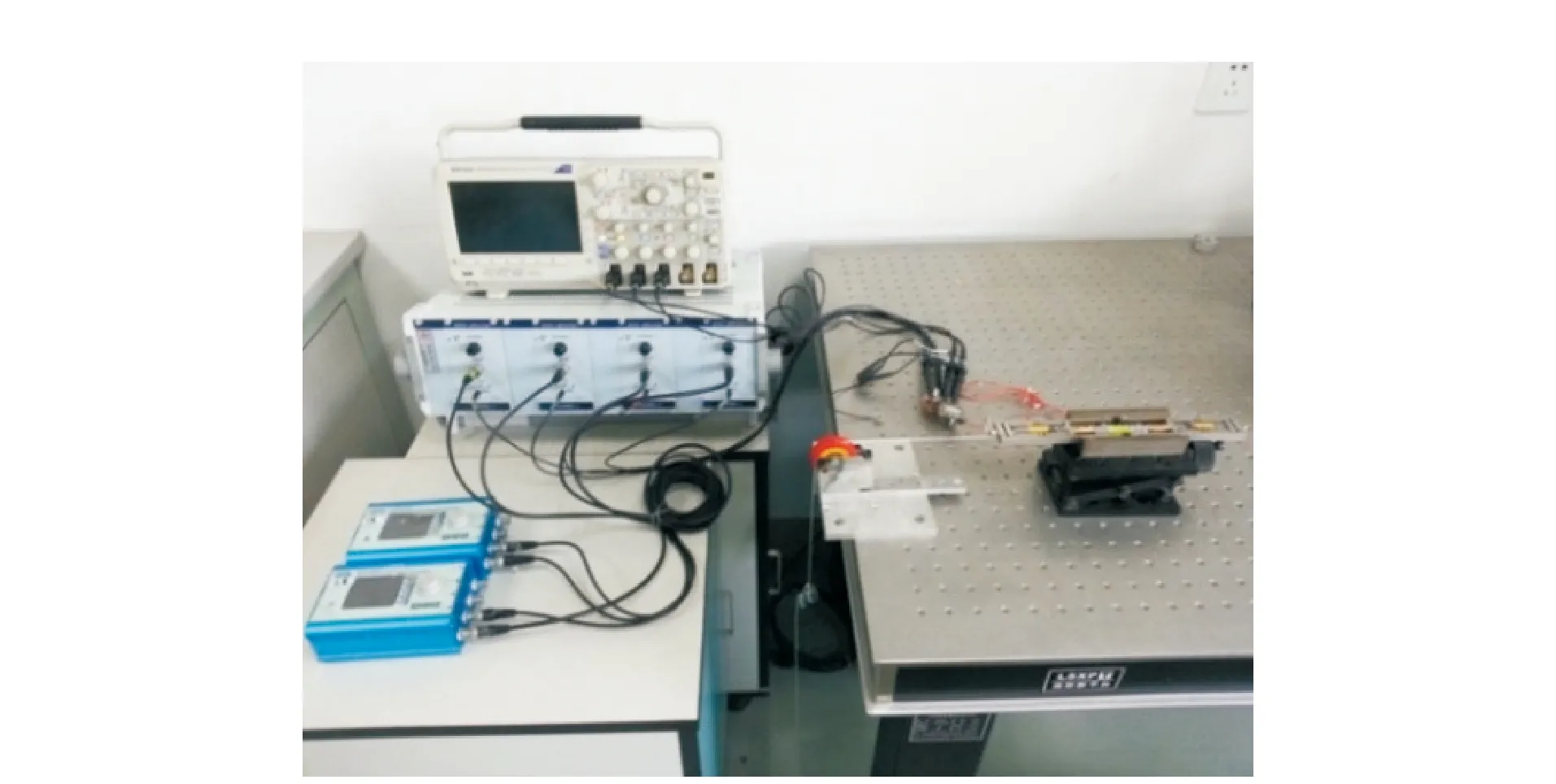
图12 输出力实验装置Fig.12 Experiment device of the output force

图13 机械特性曲线Fig.13 Mechanical characteristic curve
4 结束语
利用叠层压电陶瓷设计并制作了一种新型结构的两级复合放大箝位步进压电直线电机,分析了电机的工作原理,给出了该电机输出力和主要影响因素之间的关系,对其速度特性和机械特性设计实验并做分析。该电机具有结构简单、安装方便、能够自锁和频率可调等优点,无载荷下最大速度可达1.23 mm/s,最大推力可达1.6 N,有效降低了驱动器的加工与装配要求,增强了电机运行的稳定性,基本满足精密直线进给系统的要求,包括速度、分辨率和驱动力等。
[1] 黄茹楠,陈在礼.超声电机在国外的发展[J].振动、测试与诊断,2002,22(4):270-276.
Huang Runan,Chen Zaili.Recent development of ultrasonic motors[J].Journal of Vibration,Measurement &Diagnosis,2002,22(4):270-276.(in Chinese)
[2] 金家楣,张建辉,赵淳生.新型多轴旋转超声电机原理[J].振动、测试与诊断,2008,28(4):369-372.
Jin Jiamei,Zhang Jianhui,Zhao Chunsheng.Principle of a new type of ultrasonic motor rotating around multi-axis[J].Journal of Vibration,Measurement &Diagnosis,2008,28(4):369-372.(in Chinese)
[3] Jun S H,Leea S M,Lee S H,et al.Piezoelectric linear motor with unimorph structure by co-extrusion process[J].Sensor and Actuators A:Physical,2008,147(1):300-303.[4] Sergey B,Kim J D,Kim H J,et al.Nano-positioning system using linear ultrasonic motor with "shaking Beam"[J] .Journal of Electroceramics,2004(12):169-173.
[5] 姚志远,杨东,赵淳生.杆结构直线超声电机的结构设计和功率流分析[J] .中国电机工程学报,2009,29(24):56-60.
Yao Zhiyuan,Yang Dong,Zhao Chunsheng.Structure design and power flow analysis of bar-structure linear ultrasonic motors[J].Proceedings of the CSEE,2009,29(24):56-60.(in Chinese)
[6] Kurosawa M.State-of-the-art surface acoustic wave linear motor and its future applications[J] .Ultrasonics,2000,38(3):15-19.
[7] 金家楣,时运来,李玉宝.新型惯性式直线超声压电电机的运动机理及实验研究[J] .光学精密工程,2008,16(12):2371-2377.
Jin Jiamei,Shi Yunlai,Li Yubao.Research on novel inertial linear ultrasonic piezoelectric motor[J] .Optics and Precision Engineering,2008,16(12):2371-2377.(in Chinese)
[8] 张兆成,胡泓.蠕动式压电直线驱动器的发展及应用[J].微特电机,2009,3:56-59.
Zhang Zhaocheng,Hu Hong.Development and application of inchworm-type piezoelectric linear motor[J].Small &Special Electrical Machines,2009,3:56-59.(in Chinese)
[9] 赵宏伟,吴博达,华顺明.尺蠖型压电直线驱动器的动态特性[J].光学精密工程,2007,15(6):873-877.
Zhao Hongwei,Wu Boda,Hua Shunming.Dynamic performance of inchworm-type piezoelectric linear motor[J].Optics and Precision Engineering,2007,15(6):873-877.(in Chinese)
[10]潘雷.多足箝位式压电直线电机的研究[D].南京:南京航空航天大学,2012.
[11]潘雷,王寅,黄卫清.多足箝位式压电直线电机的研究[J].中国机械工程,2013,24(8):1080-1084.
Pan Lei,Wang Yin,Huang Weiqing.Study on multi-foot clamping piezoelectric linear motor[J].Chinese Journal of Mechanical Engineering,2013,24(8):1080-1084.(in Chinese)
[12]王寅,孙梦馨,黄卫清.双足步进作动压电直线电机的工作机理及实验[J].振动、测试与诊断,2015,35(2):388-393.
Wang Yin,Sun Mengxin,Huang Weiqing.Principle and experimental research on piezoelectric linear stepping motor with double driving feet[J].Journal of Vibration,Measurement &Diagnosis,2015,35(2):388-393.(in Chinese)
[13]陈西府,黄卫清,王寅.动摩擦型压电叠堆直线电机定子的振动特性[J].振动、测试与诊断,2014,34(5):960-966.
Chen Xifu,Huang Weiqing,Wang Yin.Vibration characteristics of the stator of dynamic friction type linear piezoelectric stack motors[J].Journal of Vibration,Measurement &Diagnosis,2014,34(5):960-966.(in Chinese)

10.16450/j.cnki.issn.1004-6801.2017.04.010
* 国家自然科学基金资助项目(51375224);华侨大学高层次人才科研启动费资助项目(15BS102)
2015-08-28;
2015-11-12
TM356;TH113.1
韩路,男,1989年4月生,硕士生。主要研究方向为压电直线电机的研究与应用。
E-mail:15151820995@163.com
猜你喜欢
仪表技术与传感器(2022年4期)2022-05-31
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
中学生理科应试(2021年10期)2021-12-07
陶瓷学报(2021年4期)2021-10-14
陶瓷学报(2021年3期)2021-07-22
陶瓷学报(2020年6期)2021-01-26
中国特种设备安全(2019年7期)2019-09-10
装备机械(2017年4期)2018-01-23
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27