
基于MEMS惯性测量单元的多源信息自适应步数检测方法
2017-09-12 01:12朱庄生张雨龙
中国惯性技术学报 2017年3期
朱庄生,张雨龙,李 驰
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
基于MEMS惯性测量单元的多源信息自适应步数检测方法
朱庄生,张雨龙,李 驰
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
针对基于MEMS惯性测量单元的行人航迹推算中步数检测方法仅利用单一的加速度信号检测精度较低的问题,提出一种多源信息自适应步数检测方法。该方法通过综合考虑人体运动过程中的加速度信号和角速度信号,根据不同的步态特征通过设定不同的自适应阈值条件实现步数的检测。虽然常规的峰值检测算法和固定阈值检测算法在单一步态下步数检测精度相对较高,但是对复杂运动状态下的步数检测精度很差,无法适用于真实的行人运动过程中步数的检测。然而多源信息自适应步数检测方法却能够在行人不同运动状态下精确检测步数,该方法明显优于常规的峰值检测方法和阈值检测方法。试验结果表明,本文提出的多源信息自适应阈值检测方法在行人不同运动状态下的步数检测精度可达98%以上。
MEMS;行人航迹推算;多源信息自适应;步数检测
当前室内定位技术大致可以分为两大类:非自主导航技术和自主导航技术。第一类技术包括WiFi、ZigBee、Bluetooth、Ad hoc 和Ultra Wide-Band(UWB)等,这类导航定位技术必须依靠信号的基站以及基站与目标对象间的通信链路,在紧急救援(如消防救援)等应急任务条件下,这类导航定位技术无法实现实时精确定位,而对于复杂环境下(如矿井下),要实现该类技术需要投入大量的基础设施建设,建设成本又太高。第二类技术主要指惯性导航技术,它不依赖于任何外部信息,完全实现自主导航定位,可为特定环境内移动的“人”提供精确的位置信息,满足当前对于应急环境下对导航定位的需求。
为实现行人的自主导航,近年来将陀螺仪和加速度计安装在人体上(以人为运载体),研究基于MEMS惯性传感器的行人航迹推算(PDR)技术成了国内外高校和研究机构的研究热点[1-6]。但由于人体运动和火箭、导弹、车辆等运载体的运动特性大不相同,也给PDR技术带来新的难题。基于行人这个运载体运动特征的特殊性,将传统的惯性导航技术直接应用在行人身上无法满足精确获取行人导航定位信息的需求。因此,如何根据人体的运动特征,通过分析惯性传感器的输出信号间接地获取行人人行走的距离与航向角信息是研究的关键。所以,PDR技术的难点在于精确获取行人的步数、步长和航向。
针对以上问题,本文提出了一种多源信息自适应步数检测方法。基于人在行走过程中每一步产生的加速度和角速度与运动状态的相关性,通过设置自适应的加速度和角速度阈值就可以判断行人运动状态。针对不同个体、不同运动状态采用不同的自适应阈值参数就可以进行步数的判别。通过联合使用加速度和角速度信号代替单纯依靠加速度信号进行步数检测不但消除了误检测对计步结果的影响,而且提高了计步准确率。在北京航空航天大学体育场进行现场试验的试验结果表明本文提出的步数检测对于不同个体的多种运动方式都可以实现准确检测,计步准确率高达98%。
1 基于航迹推算的行人导航原理
航迹推算的现代定义由cotter提出,其定义为:从一个已知的坐标位置开始,根据运载体在该点的航向、行驶距离,推算下一时刻的坐标位置的导航过程称为航位推算。航迹推算原理如图1所示,其中位置与航向角的推算如下式:

式中:dRn-1和dθn分别为从n-1时刻位置(Xn-1,Yn-1)到n时刻位置(Xn,Yn)的位移矢量变化和航向变化。
行人航迹推算的关键是得到行人行走距离和行走航向,但由于传感器存在累计误差,行走距离通过两次积分加速度得到并不可靠,因此根据人体生理特性,在行走运动中将行人行走的距离等价于求行走步数以及每一步的步长。行走距离可根据以下公式得到:

式中:n表示tk-1时刻到tk时刻行走步数;stepi表示行走第i步的步长;Sk表示行走距离。

图1 航迹推算原理图Fig.1 Principle of the dead reckoning
对于行人航向角的估计,如果只依靠低精度的陀螺仪积分获取,由于器件的误差特性将导致得到的航向角不可信。但如果综合利用磁传感器误差不积累与陀螺仪短时精度高的优点,将二者的输出信息经扩展卡尔曼滤波器(EKF)进行融合就可以得到一个满意的结果。本文获取航向角采用的就是这种方法,具体的原理如图2所示。

图2 航向角估计原理图Fig.2 Principle for estimating the heading
2 MEMS惯性导航模块在PDR中的应用
要实现室内导航定位功能,首要的工作就是获取移动目标在平面和高程的位置信息以及移动目标的航向信息。移动目标平面内的位置信息和航向信息可以通过行人航迹推算(PDR)技术来获取,高程方向的位置信息可通过气压计来获取。然而行人航迹推算需要实时获取行走距离和航向信息,平面内的行走距离测量需要加速度传感器,高程位置测量需要气压计,航向信息测量需要陀螺仪和磁传感器。通过调研选用了带有蓝牙功能的JY901B模块,该模块集成了陀螺仪、加速度计、地磁场传感器和气压计,可以提供角速度、加速度、角度、磁场、气压、高度、温度等信息;该模块的输出频率在0.1~200 Hz,加速度计和陀螺仪不仅具有16位的分辨率,还具有大量程的特点。JY901模块的特性参数和静态输出分别如表1和图3所示。
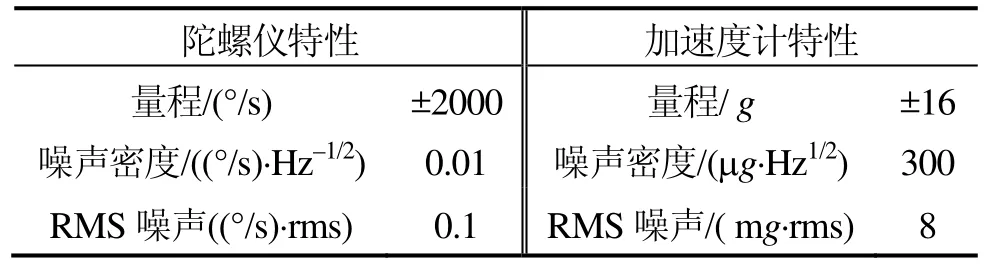
表1 JY901B模块特性Tab.1 Characteristics of JY901B module

图3 静态条件下JY901B模块输出信号Fig.3 Output of JY901B module under static condition
3 基于MEMS惯性导航模块的行人步数检测
行走是人体日常生活中重复最多的一种整体性运动。根据步态特征的不同可将人体的运动状态划分为正常运动状态(常规的行走)和非正常运动状态(包括慢走、快走、慢跑、快跑等)。由于人类个体之间的内在差异,每个人的步态模式都是独特的[7-8],因此深入研究步数检测方法具有重要意义。行人步数检测作为PDR中最基本的一步,计步结果准确与否直接影响PDR定位的精度。当前已有多种基于MEMS惯性器件的行人步数检测方法[9-13],典型的步数检测方法主要有:1)自适应波峰检测算法[8],它利用整体加速度的自适应波峰检测行人步数,实现了正常行走状态下和非正常状态下的计步,但是由于伪波峰的存在,这种检测方法的精度并不高;2)固定阈值检测法[9],通过对加速度信号设定阈值,当加速度信号超过一定的阈值时就认为是有效步数,实现步数检测,这种方法在单一的步态特征下可以达到很高的检测精度,但是对于人体在正常和非正常交替运动的情况下,由于不同运动方式下对应的阈值不同,这种检测方法的精度并不高;3)动态时间规整法[11],基于不同步态下所历经的时间不同的特性,通过划分时间段来实现步数的检测,这种方法对于正常步态方式检测精度很高,但是无法应用于非正常步态方式检测;4)短期傅里叶变换法[12],通过将加速度信号变换到频域进行分析,基于人在运动极限频率在2~5 Hz这一事实,通过划分不同运动方式下的频率来实现步态的识别与检测,但由于噪声的影响这种检测方法的精度并不高。
综上所述可知,已有的步数检测方法都有局限性,当前并没有一种通用的精确检测步数的方法。针对步数检测不精确这一问题,本文提出一种多源信息自适应步数检测方法,该方法的原理是利用人体运动过程中反映在足部的加速度信号和角速度信号的变化规律,并综合考虑行人在行走过程中的时间信息,通过对加速度和角速度信号设定自适应的阈值来实现步数检测。
3.1 行走过程中足部陀螺仪输出信号分析
通过对人体的步态特征分析发现,正常步行过程中角速度的变化具有很强的类周期性。本文通过真实的实验对行走过程中陀螺仪输出信号的类周期性进行了验证,实验结果如图4所示。
实验结果表明,置于足部的陀螺仪在人体行走过程中输出的信号具有类周期性,可以用于辅助步态分析。

图4 正常行走过程中陀螺仪输出信号Fig.4 Output of gyro during normal walking
3.2 多源信息自适应步数检测方法
多源信息自适应步数检测方法是基于人体在行走过程中加速度信号和角速度信号的变化规律提出的。该方法综合考虑了人在行走过程中运动方式的多样性以及输出信号的规律性,通过动态地调整加速度阈值、角速度阈值、时间阈值来实时跟踪步态。具体原理如图5所示。
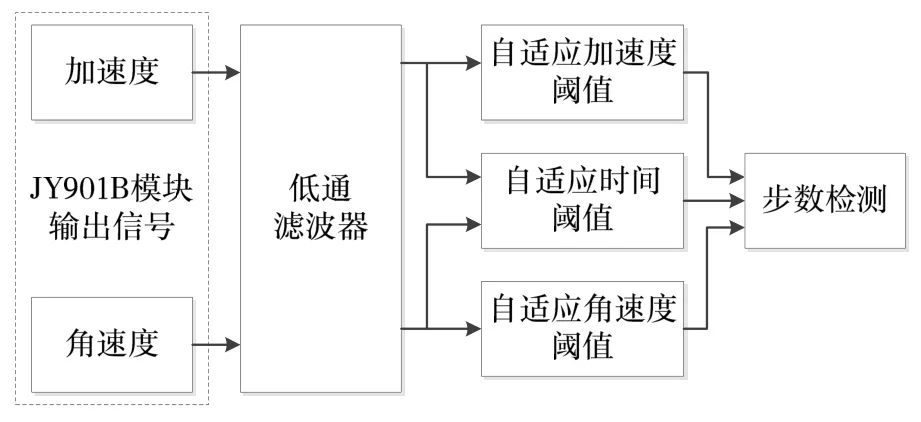
图5 基于JY901B模块的自适应步数检测原理图Fig.5 Principle of adaptive step detection method based on JY901B module
自适应加速度阈值和自适应角速度阈值的获取方法如下:
1)自适应加速度上阈值是通过求取固定时间段内的正向加速度信号的均值来实现的,为自适应加速度上阈值,n为这段时间内的正向加速度采样个数,Ai为这段时间内正向加速度的值。自适应加速度上阈值计算公式为

2)自适应加速度下阈值是通过求取固定时间段内的负向加速度信号的均值来实现的,为自适应加速度下阈值,n为这段时间内的负向加速度采样个数,Ak为这段时间内负向加速度的值。自适应加速度下阈值计算公式为

3)自适应角速度上阈值是通过求取固定时间段内的正向角速度信号的均值来实现的,为自适应角速度上阈值,n为这段时间内的正向角速度采样个数,ωi为这段时间内正向角速度的值。自适应角速度上阈值计算公式为

4)自适应角速度下阈值是通过求取固定时间段内的负向角速度信号的均值来实现的,为自适应角速度下阈值,n为这段时间内的负向角速度采样个数,ωk为这段时间内负向角速度的值。自适应角速度下阈值计算公式为

步数检测的条件设定为

根据公式(3)~(6)计算得到的自适应阈值设定步数检测条件,只有当公式(7)中的4个条件都满足时,说明检测到的步数有效,计步值加1。
基于JY901B惯性导航模块的多源信息自适应步数检测流程如图6所示。

图6 步数检测流程图Fig.6 Flow chart of number-of-steps detection
4 实验验证与结论
针对本文提出的多源信息自适应步数检测方法,作者对多种步态(包括慢走、常规行走、快走、慢跑、快跑等)在北京航空航天大学体育场进行了多组测试。其中将常规行走作为一种正常的运动方式,其它步态特征作为非正常运动方式。实验过程中将JY901B模块安装于脚尖部位,具体安装位置如图7所示。JY901B模块通过一个串口转USB模块实现与笔记本电脑上运行的上位机通讯,并且完成整个行走过程中数据的采集。

图7 硬件模块安装示意图Fig.7 Schematic of hardware module installation
采用多源信息自适应步数检测方法对非正常步态下的步数检测实验结果如图8与图9所示。实验后还将这种检测方法的结果与传统的峰值检测方法、固定阈值检测方法做了对比,结果如表2所示。

图8 自适应加速度阈值检测Fig.8 Adaptive detection for acceleration threshold

图9 自适应角速度阈值检测Fig.9 Adaptive detection for angular velocity threshold

表2 各种检测方法结果对比Tab.2 Experimental results of various detection methods
实验结果表明,本文提出的多源信息自适应步数检测方法可以在非正常步态方式下实现精确检测,准确率可达98%左右。然而常规的峰值检测法、固定阈值检测法在非正常步态方式时根本无法精确检测。但是在单一的步态方式下,阈值检测法和峰值检测法也可以达到很高的精度。综上所述可知,本文提出的步数检测方法在现实生活中更加适用于真实的人体运动特征的检测,通过进一步的深入研究最终可以应用到实际的基于行人航迹推算的系统中,为提高行人航迹推算的精度奠定了基础。
(References):
[1] Saarinen J, Suomela, Heikkila S, et al. Personal navigation system[C]//Proceedings of 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems.IEEE, 2004, Vol.1: 212-217.
[2] Wang S, Liu K, Liu Y, et al. Analysis for low cost inertial sensors based pedestrian dead reckoning[C]//The Proceedings of the Second International Conference on Communications, Signal Processing, and Systems. Springer International Publishing, 2014: 1029-1037.
[3] 张金亮, 秦永元, 梅春波. 基于 MEMS 惯性技术的鞋式个人导航系统[J]. 中国惯性技术学报, 2011, 19(3):253-256.Zhang Jin-liang, Qin Yong-yuan, Mei Chun-bo. Shoemounted personal navigation system based on MEMS inertial technology[J]. Journal of Chinese Inertial Technology, 2011, 19(3): 253-256.
[4] 张晓东. 基于MEMS惯性器件的个人导航系统研究[D]. 北京: 北京工业大学, 2015.Zhang Xiao-dong. Personal navigation system based on MEMS inertial devices[D]. Beijing: Beijing University of Technology, 2015.
[5] 李金凤, 王庆辉, 刘晓梅, 等. 基于MEMS惯性传感器的行人航位推算系统[J]. 传感器与微系统, 2014, 33(12):85-87.Li Jin-feng, Wang Qing-hui, Liu Xiao-mei, et al. Pedestrian dead reckoning system based on MEMS inertial sensor[J]. Transducer and Micro-system Technologies,2014, 33(12): 85-87.
[6] 许睿. 行人导航系统算法研究与应用实现[D]. 南京:南京航空航天大学, 2008.Xu Rui. Research and application of pedestrian navigation system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2008.
[7] 陈国良, 李飞, 张言哲. 一种基于自适应波峰检测的MEMS计步算法[J]. 中国惯性技术学报, 2015, 23(3): 315- 321.Chen Guo-liang, Li Fei, Zhang Yan-zhe. Pedometer method based on adaptive peak detection algorithm[J]. Journal of Chinese Inertial Technology, 2015, 23(3): 315-321.
[8] Qian J, Ma J, Ying R, et al. Improved indoor localization method using smart phone inertial sensors[C]//2013 International Conference on Indoor Positioning and Indoor Navigation. IEEE, 2013: 1-7.
[9] Li F, Zhao C S, Ding G Z, et al. A reliable and accurate indoor localization method using phone inertial sensors[C]//Proceedings of the 2012 ACM Conference on Ubiquitous Computing. Association for Computing Machinery,2012: 421-430.
[10] Brajdic A, Harle R. Walk detection and step counting on unconstrained smart phones[C]//Proceedings of the 2013 ACM International Joint Conference on Pervasive and ubiquitous computing. Association for Computing Machinery, 2013: 225-234.
[11] 田晓春, 陈家斌, 韩勇强, 等. 多条件约束的行人导航零速区间检测算法[J]. 中国惯性技术学报, 2016, 24(1): 1-5.Tian Xiao-chun, Chen Jia-bin, Han Yong-qiang, et al.Zero-velocity interval detection algorithm with multicondition constraint for pedestrian navigation[J]. Journal of Chinese Inertial Technology, 2016, 24(1): 1-5.
[12] Wang Z L, Zhao H Y, Qiu S, et al. Stance phase detection for ZUPT-aided foot-mounted pedestrian navigation system[J]. IEEE/ASME Transactions on Mechatronics, 2015,20(6): 1-1.
[13] Jiménez A R, Fernando S, Francisco Z, et al. PDR with a foot-mounted IMU and ramp detection[J]. Sensors, 2011,11(10): 9393-410.
Multi-source information adaptive step detection method based on MEMS inertial measurement unit
ZHU Zhuang-sheng, ZHANG Yu-long, LI Chi
(School of Instrumentation Science and Opto-electronics Engineering, Beihang University, Beijing 100191, China)
In pedestrian dead reckoning (PDR) based on MEMS IMU, the detection for number of steps has a lower accuracy due to basing only on the accelerometer signals. To improve the detection accuracy, an adaptive detection method with multi-source information is proposed for the step detection. In this method,the adaptive detection is realized by comprehensively considering the angular velocity signals and the acceleration signals in the process of human movement and setting different adaptive threshold conditions based on different gait features. Unlike the conventional peak detection algorithm and the fixed-threshold detection algorithm, which have rather poor detection accuracy under abnormal human movements, the proposed method can accurately detect the number of steps under complex pedestrian motion behaviors.Experiment results show that the detection precisions by the proposed method can reach more than 98%under different pedestrian motion states.
MEMS; pedestrian dead reckoning; multi-source information adaption; step detection
TH7
:A
1005-6734(2017)03-0299-05
10.13695/j.cnki.12-1222/o3.2017.03.004
2017-02-12;
:2017-05-27
国家重大科学仪器设备开发专项基金项目(2012YQ160185);国家高技术研究发展计划(2015AA124002);国家自然科学基金(60421063)
朱庄生(1972—),男,副教授,硕士生导师,从事惯性导航、行人导航技术研究。E-mail: zszhu@buaa.edu.cn
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
奇妙博物馆(2021年4期)2021-05-04
小演奏家(2018年9期)2018-12-06
电子制作(2018年18期)2018-11-14
科学之谜(2018年4期)2018-09-17
中学课程辅导·教师通讯(2018年10期)2018-09-04
党的生活(黑龙江)(2017年10期)2017-11-09
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
空间控制技术与应用(2009年2期)2009-12-20
