大型外挂物投放影像测量亚像素定位技术∗
2017-09-12 08:49冀芳武瑞娟何红丽
计算机与数字工程 2017年8期
冀芳武瑞娟何红丽
大型外挂物投放影像测量亚像素定位技术∗
冀芳武瑞娟何红丽
(中国飞行试验研究院西安710089)
武器投放特别是大型外挂物投放时的初始姿态对武器的命中精度和飞机飞行安全具有重要影响。在某型飞机武器火控试飞中,需要完成某型导弹发射初始段姿态测量。由于该型导弹弹体大,测量视场分辨率低。为提高测量精度,采用亚像素定位技术,利用Hough变换提取相交直线,以直线元素为基准,提出以垂直于原图像直线方向的窗口,计算每个像素梯度的模,选取对应的坐标数据带入线性误差方程,用最小二乘法解其改正数,迭代求解精确求得直线参数,解算交点实现测量特征点图像坐标的亚像素定位。试验结果表明,经过亚像素定位后,测量精度可以提高约三倍,满足测量要求。
大型外挂物;影像测量;亚像素;Hough变换;线性误差方程
Class NumberTP391.41
1引言
弹体的空间姿态测量是战斗机武器火控试飞和武器系统发射精度评估不可或缺的研究科目。武器投放特别是大型外挂物投放时的初始姿态对武器的命中精度和飞机飞行安全具有重要影响。在某型飞机武器火控试飞中,需要完成某型导弹发射初始段姿态测量。由于该型导弹弹体较大,弹体长度接近8m,导弹发射初始段姿态测量难度大。
影像测量技术是测量领域的新兴技术,它是把图像作为检测和传递信息的载体,并加以利用的测量方法。影像测量技术具有适应性强、高灵敏度、高分辨率、高速度、准确可靠等优点,非常适合于各种需要非接触测量的场合。要完成某型导弹发射初始段姿态测量任务,需要高分辨率、大视场的影像测量系统。目前使用的高速摄像机分辨率为1696×1710,采用该影像测量系统完成大型外挂物投放初始段姿态测量,精度较低。如果能将影像上的标志中心定位在亚像素级别,就相当于提高了测量系统的分辨率和精度。如点位提取精度为0.1 pixel,就相当于提高了10倍的数码相机分辨率[1],因此,亚像素法是高精度影像测量中一个重要特色技术。
利用测量标志的灰度和几何特性,通过适当选取阈值值参数,实现对指定区域内对角标志的正确识别,通过边缘检测、Hough变换提取直线元素,以直线元素为基准,提出以垂直于原图像直线方向的窗口,计算每个像素梯度的模,选取对应的坐标数据带入线性误差方程,用最小二乘法解其改正数,迭代求解精确求得直线参数,解算交点实现测量特征点图像坐标的亚像素定位。
2影像测量标志选取
测量标志的选择与设计主要从其物理特性和化学特性两方面考虑。标志的物理特性,如形状和尺寸,直接关系到标志响的量测算法和精度。标志的光学特性,如反光性能,直接影响标志的影像质量,从而间接影响了量测精度。
在大型外挂物投放影像测量系统中,采用了圆形对角测量标志(如图1所示),选用回光反射材料和对比强烈的黑白图案设计,通过提取直线交点的方法获取标志中心图像坐标。
3图像预处理
测量系统获得的影像序列的数据量非常庞大,如果对影像序列中的每张照片进行全区域处理,那么影像序列数据的处理效率将大大降低。由于测量标志目标只占图像的小部分,提取包含该标志目标的一个小区域作为ROI(Region ofinterest),减少后续步骤的处理,提高算法的运算速度。为实现亚像素定位,对ROI提取的图像需要进行测量标志的图像分割,边缘检测、直线提取过程的预处理。
3.1测量标志图像分割
图像分割[2]是图像处理中的一个关键技术之一,采用合适的分割技术可以将图像中的目标或感兴趣区域完整地提取出来。最大类间方差法[3]是N.Otsu于1979年提出的动态阈值的方法,是在最小二乘原理的基础上推导得出的。它利用图像的灰度直方图,以目标和背景的方差最大来动态地确定图像分割阈值,这种方法具有很强的适应性,使图像的分割性能有明显改善。由于测量系统采用的测量标志是黑白相间的圆形对角标志,本文采用最大类间方差法,利用自动双阈值对图像进行分割,获得测量标志黑白两部分图像。具体实现如下。
设图像中背景与两个目标的分割阈值分别为t1、t2,这样将原始图像按灰度不同分为三部分,即背景区域形成的子集为C0,两个目标区域形成的子集分别为C1和C2,这三个区域的出现概率分别为w0、w1和w2,相应的三个图像区域的平均灰度为μ0、μ1和μ2,设图像具有J级灰度,灰度级的取值范围为[] 0,J-1,pj为灰度级j出现的概率,它们定义分别为进而得到图像的灰度均值为
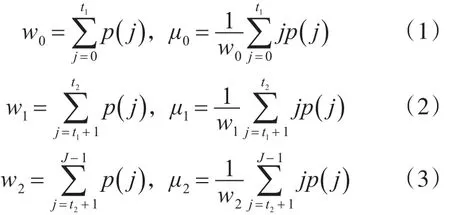

使得目标区域和背景区域的方差取得最大值的分割阈值即为最优阈值,表示为
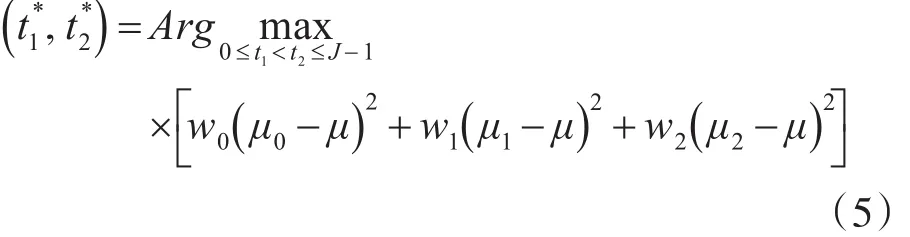
最大类间方差双阈值分割的图像如图2所示。
图2 双阈值分割图像
3.2 边缘检测
由于边缘发生在图像灰度值变化比较大的地方,对应连续情形就是说是函数梯度较大的地方,边缘检测[4]就是检测梯度的最大值,Sobel算子[5]是边缘检测中最常用的算子之一。Sobel算子利用象素点上下、左右邻点的灰度加权算法,根据在边缘点处达到极值这一现象进行边缘的检测。这种方法不仅能产生较好的边缘检测效果,而且对噪声具有平滑作用,所以可以提供较为精确的边缘方向信息,边缘检测后图像如图3所示。

图3 边缘检测图象
3.3直线提取
目前常用的直线检测算法有Hough算法[6~7]和最小二乘(Least Square Method,LSM)线性拟合[7~8]算法。Hough算法是全局的直线检测方法,算法稳定性好。Hough变换的核心思想是点-线的对偶性,通过变换将图像空间转换到参数空间。对于直线y=px+q,在图像空间中为一条过点(x,y)的直线,满足参数方程ρ= x cosθ+y sinθ,直线方程的极坐标表示如图4所示。
Hough变换检测直线的算法步骤[9~10]如下:
1)把(ρ,θ)参数空间细分为累加器单元。一般来说,取-90◦≤θ≤90◦和-D≤ρ≤D,其中D是图像对角线的距离。
2)对于图像空间上的每—个非背景点(x,y),令θ等于累加器空间中允许的细分值,并相应的ρ值。将得到的ρ值四舍五人为累加器空闻中相应的、最接近ρ允许细分值的值。相应累加器单元中的值递增。过程最后,每个累加器单元中的数值,都代表xy空间中有多少点在累加器单元对应的参数所确定的直线上。
3)比较数组元素值的大小,找到最长直线元素所对应的(ρi,θj)就是共线点对应的直线方程的参数。
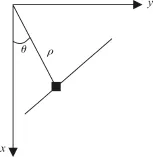
图4 直线极坐标表示
4)Hough变换的抗噪性能强,能将断开的边缘连接起来。
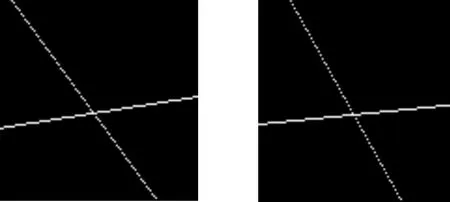
图5 Hough变换提取直线
4像点坐标的亚像素定位
在前述操作中得到的仅仅是整像素定位信息的粗略的直线元素,只要精确定位组成交点的两条直线就可定位交点。
理想的边缘是直线垂直方向上灰度有阶跃状变化的位置,这些点才是组成理想边缘的直线元素。在前述操作中得到的直线仅仅是整像素的边缘直线,要想得到亚像素的标志中心坐标,可以通过精确计算Hough变换后的两条直线方程,解算交点获得标志中心的亚像素坐标。
4.1数学模型
一个理想边缘经过成像系统输出,其影像梯度与系统的线扩散函数成正比[11],即

影像的梯度可表示为

其线性化误差方程为

其中:
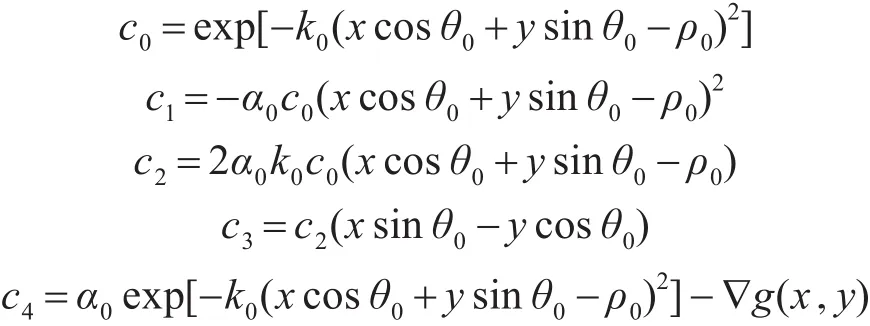
式中,ρ0、θ0为Hough变换确定的直线参数,初值为

回到原灰度图像,以直线元素为基准,垂直于原图像直线方向开3×1的窗口,分别计算每个像素梯度的模:

并记录对应的坐标(xi,yj),选取至少5组这样的数据带入误差方程,用最小二乘法解其4个改正数,迭代求解可精确解求直线参数ρ、θ。
4.2交点定位
当确定参数ρ、θ后,就可精确得到两直线方程:

其交点(xc,yc):

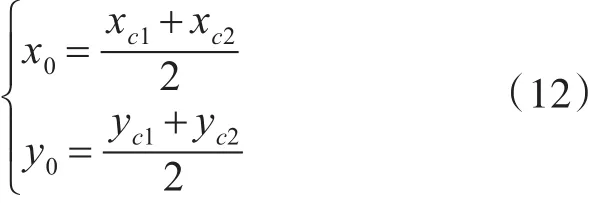
4.3圆形对角标志的定位
圆形对角标志经影像测量系统成像以后变为椭圆,为了得到椭圆中心精确的亚像素坐标,分别对测量标志黑白两部分图像获取的两组相交直线计算亚像素交点,然后取两组交点的中值,得到圆形对角标志中心坐标(x0,y0)计算公式如下:
5试验结果分析
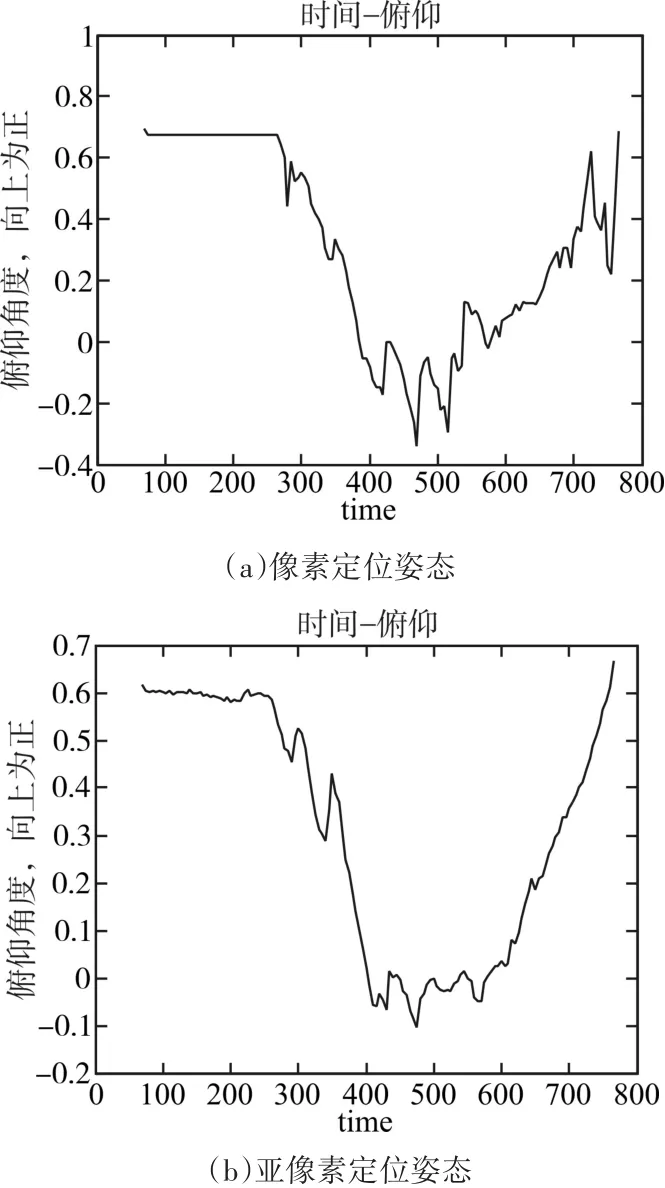
图6 亚像素定位前后弹体俯仰角姿态变化对比
在某型飞机导弹发射试飞初始段姿态测量课题中,获得了导弹发射初始段影像测量数据,图7给出了亚像素定位前后弹体俯仰角姿态变化的对比,其中图6(a)为未经亚像素定位解算的姿态,图6(b)为经过亚像素边定位解算的姿态,从图上可以看出,在图6(b)中水平轴、竖直轴两者的线性关系非常好,表明测量的结果可以表示弹体实际姿态的变化,而在图6(a)中两者线性关系被破坏,表明测量精度低,而经过亚像素边缘检测后,测量精度可以提高约三倍。
6结语
本文提出的影像测量亚像素定位技术在实际中保障了某型导弹发射试验,完成了对导弹发射过程中初始段轨迹、姿态等参数的解算,精度满足测量需求。提出的测量方式和计算方法,为后续大型外挂物投放分离影像测量提供宝贵的经验技术。
[1]于起峰,陆宏伟,刘肖琳.基于图像的精密测量与运动测量[M].北京:科学出版社,2002:132-157.
YU Qifeng,LU Hongwei,LIU Xiaolin.Image-Based Preci⁃sion Measurement and Motion Measurement[M].Beijing. Science Press,2002:132-157.
[2]章毓晋.图像分割[M].北京:清华大学出版社,2000:50-70.
ZHANG Yujin.Image Segmentation[M].Beijing:Tsing⁃hua University Press,2000:50-70.
[3]OTSU N.A threshold selection method from gray-level histograms[J].IEEE Trans SMC,1979,9(1):62-69.
[4]曾欢,王浩.图像边缘检测算法的性能比较与分析[J].现代电子技术,2006,14:53-55.
ZENG Huan,WANG Hao.Performance Comparison and Analysis of Image Edge Detection Algorithm[J].Modern Electronics Technique,2006,14:53-55.
[5]THEUSL T,MOLLER T,HLADUVKA J,et al.Recon⁃struction issues in volume visualization[Z].Data Visual⁃ization:The State ofthe Art,2003:109-126.
[6]周云燕,杨坤涛.基于RHTLSM直线检测方法的研究[J].光电工程,2007,34(1):55-58.
ZHOU Yunyan,YANG Kuntao.Research on Linear De⁃tecting Method Based on RHTLSM[J].Optoelectronic En⁃gineering,2007,34(1):55-58.
[7]Xu L,O ja E,Kultanen P.A new curve detection meth⁃od:randomized Hough transform(RHT)[J].Pattern Rec⁃ognition Letters,1990,11(5):331-338.
[8]Ramsey J B.Tests for Specification Errors in Class Linear LeastSquares Regression Analysis[J].Journal of the Roy⁃al Statistical Society.Series B(Methodological),1969,31(2):350-371.
[9]贾永红.计算机图像处理与分析[M].武汉:武汉大学出版社,2001:153-172. JIA Yonghong.Computer Image Processing and Analysis[M].Wuhan:Wuhan University Press,2001:153-172.
[10]Illingworth J,Kittler J.A survey of the Hough transform[J].CVGIP:Image Understanding,1988,44(1):87-116.
[11]LI Yushan,Young T Y.Subpixel Edge Detection and Es⁃timationwith a Microprocess Controlled Line Scan Camera[J].IEEETrans on PAMI,1988(5):3-6.
Sub PixelPositioning Technology for Large ExternalStore Image Measurement
JI Fang WU Ruijuan HE Hongli
(Chinese Flight Test Establishment,Xi'an 710089)
The initialpose ofthe weapon delivery,especially the large externalstore,has importantinfluence on the hitpreci⁃sion of weapon and the safety of aircraft flight.In a certain type of aircraft weapon fire control test,it needs to complete a certain type of missile launch initial segment attitude measurement.Because the missile body is large,the measurement field of resolution is low.In order to improve the measurementaccuracy,the sub pixelpositioning technology is adopted.Using Hough transform to de⁃tect straight line.Based on the linear elements,a window which is perpendicular to the direction of the line of the original image is proposed.Each pixel gradient mode is calculated,and the coordinate data generation is selected into the linear error equation. Square method is used to solve the correction data,and the iterative method to obtain the accurate linear parameters.The sub pixel location of the image coordinates of the measured feature points is realized by calculating the intersection point.The experiment re⁃sults show that after sub pixel location,measurement accuracy can be improved about three times,meeting the measurement re⁃quirement.
large externalstore,image measurement,sub pixel,Hough transform,linearerror equation
TP391.41
10.3969/j.issn.1672-9722.2017.08.040
2017年2月4日,
2017年3月22日
冀芳,女,硕士研究生,高级工程师,研究方向:飞行试验摄影测量和数字图像处理及测量技术。武瑞娟,女,硕士研究生,高级工程师,研究方向:飞行试验工程测量和数据处理及测量技术。何红丽,女,硕士,高级工程师,研究方向:飞行试验工程测量和数据处理及测量技术架构。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
玩具世界(2022年1期)2022-06-05
体育教学(2022年4期)2022-05-05
集装箱化(2021年1期)2021-04-12
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
漫画月刊·哈版(2019年4期)2019-04-18
通信产业报(2016年44期)2017-03-13
雕塑(1999年2期)1999-06-28
雕塑(1996年2期)1996-07-13