
面向地下管道的四向行走智能机器人系统*
2017-09-11 14:24周卫元陈立建毛科技
传感器与微系统 2017年9期
周卫元, 方 飞, 陈立建, 毛科技, 夏 明
(1.浙江广播电视大学 萧山学院,浙江 杭州 311200;2.浙江工业大学 计算机科学与技术学院,浙江 杭州 310032)
面向地下管道的四向行走智能机器人系统*
周卫元1, 方 飞2, 陈立建1, 毛科技2, 夏 明2
(1.浙江广播电视大学 萧山学院,浙江 杭州 311200;2.浙江工业大学 计算机科学与技术学院,浙江 杭州 310032)
为了减小地下管道作业人员伤亡,降低城市地下管道维护的成本,研制开发了一种面向地下管道的四向行走智能机器人系统,详细描述了机器人的硬件设计和控制软件设计。机器人控制系统采用ARM—CORTEX芯片作为主控芯片,由于地下管道的特殊性采用有线通信方式,上位机控制软件简洁易操作。测试结果表明:机器人工作性能良好,能够适应不同管径的地下管道,同时具有防水防尘等特性,研究具有一定参考价值。
管道机器人; 地下管道; 硬件结构; 机器人控制系统; 软件设计
0 引 言
城市地下管道具备电、热、水系统的运送和排污等功能,是城市生存和发展所依赖的主要基础设施[1]。目前,地下管道的清管和管道检测主要依赖于污水流量或施工人员的工作,不仅效率低下且恶劣的环境对人体有害[2,3];因此,研究开发一种能够完成地下管道清洗和检测的管道机器人,既是建设现代化文明城市的需要,也是加强环境保护的需要。
为了减小工作人员伤亡同时也能够降低城市地下管道维护的成本,众多管道机器人应运而生[4~13]。如国外的Versatrax150探索机器人,采用模块化的设计,同时配有远端内部管道检测系统,能够适应不同管径管道,然而该机器人机体过于复杂,成本较高,而且仅有侦查功能,无法清扫并且仅有前、后两个行走方向。韩国的TS-ROBOCAM检测爬行器操作简易,具有很强的侦测能力,但该管道机器人采用轮式行走方式,在潮湿及复杂环境,可能出现打滑现象,而影响工程作业。同时,上述管道机器人的控制均需通过特制的控制箱或者控制盒,限制了管道机器人的使用场景且不利于携带。
针对上述情况,本文研制了一种适用于地下管道工程作业的智能机器人,并详细叙述了其总体结构和控制系统,最终,对机器人的性能进行了实验测试。
1 机器人硬件结构
研制的管道机器人能够通过摄像头采集现场图像,通过气体传感器采集管道内相应气体数据,并将所有数据通过以太网传输至远端控制系统,控制系统监测管道环境,同时控制机器人的行走、机械臂的操作,实现人力替代。机器人硬件系统如图1所示,主要由行走机构、机械臂机构、清洁机构、控制机构以及感知机构5大模块组成。
1.1 行走机构
行走机构包括由3 mm厚不锈钢打造的机器人机身、滚轮组件以及包覆在滚轮组件外部且安置在机身两侧的不锈钢防水履带。机身内部安装有2个参数为12 V/15 W,120 r/min的行走驱动电机带动履带转动,通过控制电机的正、反转实现管道机器人的左转、右转以及原地转向;通过控制电机的脉冲宽度调制(PWM)调节行走电机的速度控制机器人的行进速度。高功率的电机以及履带式行走方式使得机器人能够在环境恶劣的地下管道中穿梭自如,并且具有极强的越障能力。另外,机器人的履带通过U型支架与机器人机身连接,使得履带能够变换不同的角度以适应不同管径的管道。

图1 机器人硬件结构
1.2 机械臂机构
机械臂机构安装于机器人机身上部,包括1个三自由度机械臂;3个参数为12 V/8 W,30 r/min的蜗杆电机,用于控制机械臂前伸后缩以及左右摆动;2个180°舵机控制清洁机的转动与清洁工具的切换。三自由度机械臂组件为四连杆结构,包括第一机械臂、第二机械臂、第一连杆和第二连杆,其中,第一机械臂的底部与第二蜗杆电机的输出轴连接,第二机械臂的后端与第一机械臂的上端铰接,第二机械臂的前端配有用于安装清洁机构的第一舵机;第一连杆的一端与所述的第一机械臂的底部铰接,第一连杆的另一端与第二连杆的一端铰接,第二连杆的另一端与安装在第二机械臂后端的第二舵机铰接;舵机及电机的控制端与主控模块的舵机及电机控制端口相连,实现三自由度机械臂组件不同方向的运动。
1.3 清洁机构
清洁机构包括壳体、第三蜗杆电机、清洁毛刷、机械爪和第四舵机,通过第二舵机安装在第二机械臂前端。清洁毛刷与第三蜗杆电机的输出轴连接,机械爪通过第四舵机安装在所述的壳体另一端。当控制第二舵机时,能够实现清洁毛刷与机械爪之间的切换,配合完成各项作业任务。
1.4 控制机构
控制机构包括主控模块、与主控模块相连的数据传输模块、用于发送用户操作指令的上位机控制模块、与主控模块相连的电机驱动控制模块等。
1)主控模块为基于STM32F103ZET6芯片的嵌入式控制主板[14],用于解析上位机控制模块的控制指令,并驱动机器人各模块协同工作。
2)数据传输模块包括型号为MT7620N的智能路由芯片,可以同时提供无线(WiFi)、有线(以太网)2种数据传输方式与上位机控制模块进行通信(由于地下管道对无线信号屏蔽严重,因此,本文采用有线方式对数据进行传输,但同时也保留了无线传输接口),用于传输主控模块与上位机控制模块之间的通信数据。
3)上位机控制模块为便携式计算机或者智能移动终端,用于向用户提供一个可视化的机器人操作界面,同时将摄像头采集到的图像数据、传感器数据、机器人状态等信息通过可视化界面展现出来。并且,用户可以通过该模块向机器人发送指令,控制机器人的行为。
4)电机驱动控制模块包括单片机或DSP嵌入式电机控制芯片,用于驱动机器人各部分电机,如行走模块的直流电机、机械臂的伺服电机等。
此外,控制机构还设有保护装置(限位开关机红外传感器)。限位开关安装于机器人机身,限制机械臂的最大活动范围;而红外传感器能够探测传感器前方障碍物,防止撞击对机器人带来的损伤。
1.5 感知机构
感知模块包括危险气体传感器、第一红外传感器、360°旋转式摄像头以及LED照明灯。机身装有摄像头、气体(甲烷、硫化氢、一氧化碳)传感器、第一红外传感器以及LED照明灯,其中摄像头通过360°舵机安装在机身上方,实现摄像头360°旋转,并将图像信号通过以太网实时传输至上位机控制模块; LED照明灯设置于机身外围,用于探测管道内环境,为操作人员提供更广阔的视野,方便操作。
2 机器人控制系统及软件设计
设计的管道机器人控制系统采用上位机和下位机2级分布式控制,主要用于控制机器人实现不同的行进方向、行进速度、摄像头朝向、机械臂的伸缩以及完成相应的清洁去障等简易工作,同时将机器人所采集的实时影像数据以及传感器数据上传至上位机控制系统,为工程作业人员操作机器人提供参考。

图2 控制系统整体模块
管道机器人控制系统的整体架构如图2所示。机器人控制系统的总体结构如图3所示,其中虚线框内即为下位机部分。上位机通过控制软件经由以太网向下位机发送控制指令,数据传输模块接收到上位机的数据后,通过RS—232串口将指令传输至机器人主控板[16]。指令数据经由下位机程序解析后,控制执行相对应的管道机器人行为。同时,机器人相应的传感器数据经由RS—232串口发送至数据传输模块,传感器数据以及摄像头采集的图像数据通过以太网实时发送至上位机控制系统。
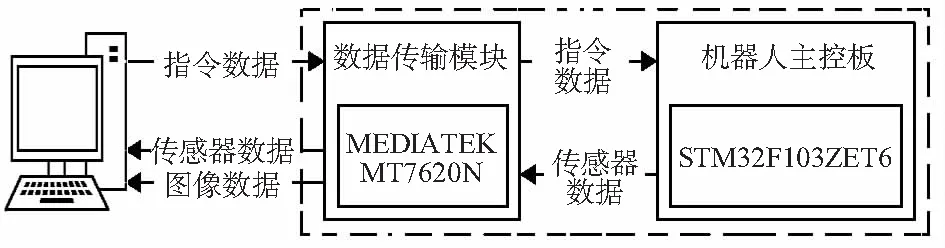
图3 机器人控制系统总体结构
当指令数据传输至主控板时,下位机程序的控制流程如图4所示。主要由2个中断程序组成。其中串口中断用于判断接收上位机发送的数据包,定时器中断则定时采集传感器数据并进行A/D转换,再经由低通滤波处理后通过串口以及数据传输模块上传至上位机。
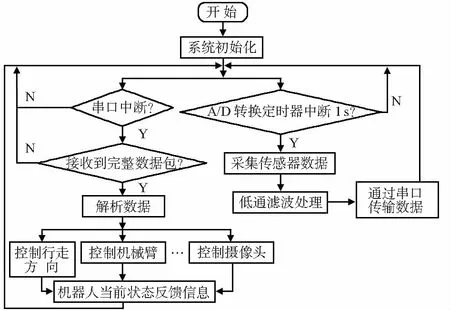
图4 下位机控制流程
上位机控制软件采用C#语言编写,使用TCP/IP协议,与下位机之间通过建立Socket套接字进行数据传输。控制系统界面如图5所示,界面简洁易操作。
机器人控制系统的整体使用流程如下:
1)启动供电模块为整个系统供电,机器人自动将机械臂、清洁毛刷、机械爪等复位。同时上位机控制模块启动、初始化,并选择线或者无线方式与机器人建立连接。
2)用户在上位机控制模块选择不同的操作,如控制机器人前进后退转向、开闭摄像头、机械臂前伸、启动清洁毛刷、开闭机械爪等,上位机控制模块通过以太网或者无线WiFi将控制指令发送至数据传输模块,数据传输模块再经由RS—232串口送至主控模块。
3)主控模块根据通信协议对所收到的控制指令进行解析,进而执行相应的操作。例如,用户在上位机控制模块控制机器人前进,主控模块收到对应指令并解析后,通过电机驱动控制模块控制相应行走模块中的直流电机正转,从而实现机器人前进动作。在这个过程中,如果保护模块检测到机器臂活动幅度过大或者检测到一定距离内出现障碍物,或感知模块中的危险气体传感器检测到危险气体浓度过高时,机器人将停止运行,并给出相应警示信息。

图5 上位机控制系统界面
3 样机测试与实验
管道机器人的样机如图6所示,主要性能如下所示:机器人质量约14 kg;行走速度可达10 m/s;电池续航时间可达60 min;地下管道内有线通信距离可达80 m;机身整体采用IP68防水防尘标准;并且采用履带可四向行走。

图6 管道机器人样机
4 结 论
设计了一种面向地下管道的四向行走智能机器人。该机器人可前、后、左、右行走,可用于转弯、复杂管道及狭隘空间。机器人上方装有多模块的三自由度机械手臂,其清洁机构设计了可切换功能,能够自由切换清洁毛刷和机械爪,以进行管道清洁、异物移除等工作;机器人后方装有气体传感器,用于监测管道内气体的主要成分;可调节的不锈钢履带,使得其能够适应不同直径的管道;不依赖特制的机器人控制箱,能够在任意便携式笔记本电脑或者智能移动终端上通过有线或者无线的方式对机器人进行实时的操作控制,抗干扰性强、应用范围广;管道机器人的状态、摄像头的图像以及传感器数据能够在上位机操作模块中实时显示,配合上位机操作模块中的控制软件,操作简便、直观;保护模块能够有效保证机器人自身的安全。因此,该机器人具有较好的稳定性与较高的实用性。
[1] Curiel-Esparza J,Canto-Perello J,Calvo M A.Establishing sustainable strategies in urban underground engineering[J].Science and Engineering Ethics,2004,10(3):523-530.
[2] Jia Z W,Qiang P Z.Analysis on the diffusion of toxic gases from gas explosion and the determination of risk area[J].China Safety Science Journal,2007,17(1):91-95.
[3] Oya T,Okada T.Development of a steerable,wheel-type,in-pipe robot and its path planning[J].Advanced Robotics,2005,19(6):635-650.
[4] Roh S,Choi H R.Differential-drive in-pipe robot for moving inside urban gas pipelines[J].IEEE Transactions on Robotics,2005,21(1):1-17.
[5] Hu Z,Appleton E.Dynamic characteristics of a novel self-drive pipeline pig[J].IEEE Transactions on Robotics,2005,21(5):781-789.
[6] Schempf H,Vradis G.Explorer:Untethered real-time gas main assessment robot system[C]∥Proc of Int’l Workshop on Advances in Service Robotics Aser’,2003.
[7] Goto Y,Ono M,Ito S,et al.2P2—H15 fabrication of a green caterpillar type in-pipe mobile robot[C]∥ロボティクス?メカトロニクス2008講演会講演概要集,2008.
[8] Roh S,Lee J S,Moon H,et al.In-pipe robot based on selective drive mechanism[J].International Journal of Control,Automation and Systems,2009,7(1):105-112.
[9] Qi H,Zhang X,Chen H,et al.Tracing and localization system for pipeline robot[J].Mechatronics,2009,19(1):76-84.
[10] Qiao J,Shang J,Goldenberg A.Development of inchworm in-pipe robot based on self-locking mechanism[J].IEEE/ASME Tran-sactions on Mechatronics,2013,18(2):799-806.
[11] Bertetto A M,Ruggiu M.In-pipe inch-worm pneumatic flexible robot[C]∥Proceedings of 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics,IEEE,2001:1226-1231.
[12] Chen Y,Ren Q L T.A simple and novel helical drive in-pipe robot[J].Robotica,2015,33(4):1-13.
[13] Kurata M,Takayama T,Omata T.Helical rotation in-pipe mobile robot[C]∥2010 3rd IEEE RAS and EMBS International Confe-rence on Biomedical Robotics and Biomechatronics(BioRob),IEEE,2010:313-318.
[14] Metcalfe R M,Boggs D R.Ethernet:Distributed packet switching for local computer networks[J].Communications of the ACM,1976,19(7):395-404.
Four directions walking intelligent robot system for underground pipeline*
ZHOU Wei-yuan1, FANG Fei2, CHEN Li-jian1, MAO Ke-ji2,XIA Ming2
(1.College of Xiaoshan,Zhejiang Radio and Television University,Hangzhou 311200,China; 2.College of Computer Science and Technology,Zhejiang University of Technology,Hangzhou 310032,China)
In order to reduce the casualties in underground pipe operations and lower the cost of urban underground pipeline maintenance,develop an intelligent robot system which can replace human to accomplish underground pipe operations.design of hardware and control software of the robot is described.The robot control system uses an ARM-CORTEX chip as the master control chip.The robot adopts wired communications due to the particularity of the underground pipeline environment,software of upper PC control is simple and easy for operation.All the experimental results suggest that the robot performs well in real environment;it adapts to different underground pipes with different diameter and meets the standards of the waterproof and dustproof.It has certain reference value for study of in-pipe robot.
in-pipe robot; underground pipes; hardware structure; robot control system; software design
10.13873/J.1000—9787(2017)09—0073—04
2017—06—27
国家自然科学基金资助项目(61401397); 浙江省高校访问学者项目(FX2016053)
TP 242
A
1000—9787(2017)09—0073—04
周卫元(1970-),男,硕士,讲师,主要研究方向为机电工程,智能机器人。
夏 明(1981-),男,通讯作者,博士,副教授,研究方向为无线传感器网络,E—mail:maokeji@zjut.edu.cn。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
自动化学报(2019年6期)2019-07-23
车迷(2018年12期)2018-07-26
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
学习月刊(2015年3期)2015-07-09
汽车维修与保养(2015年8期)2015-04-17
