污水生物脱氮系统曝气量模糊控制系统的建立
2017-09-03 09:13:47刘丽娜
黑龙江工程学院学报 2017年4期
王 伟,刘丽娜,张 鑫
(黑龙江工程学院 土木与建筑工程学院, 黑龙江 哈尔滨 150050)
污水生物脱氮系统曝气量模糊控制系统的建立
王 伟,刘丽娜,张 鑫
(黑龙江工程学院 土木与建筑工程学院, 黑龙江 哈尔滨 150050)
污水生物处理系统中,曝气量的控制至关重要。基于分段进水缺氧/好氧(SFA/O)工艺大量的试验数据,建立恒DO模糊控制和DO前馈-反馈模糊控制两种曝气量模糊控制方法。根据所建立的模糊控制规则,进行输入-输出变量的动态响应分析。结果表明:两种控制方法的输入-输出传递特性曲面近乎连续且无多峰现象,建立的曝气量模糊控制规则合理,可作为优化的模糊控制方法进行应用。
污水;脱氮;曝气;模糊控制
城市污水处理厂生物处理具有多变量、随机性、非线性、模糊性、时变性、多处理目标(如要求处理水质达标、脱氮除磷、节省运行费用、防止污泥膨胀)等特性[1-3]。传统的控制方法在系统正常运行状态下良好工作,但是在出现异常情况下不能有效工作,不能根据外界条件的变化采取相应的措施,如进水中含有毒性物质、系统机械设备出现故障[4-5]。实践证明提高污水处理厂运行系统的智能化,实现以最优出水水质和节能为目标的智能控制系统是解决当前污水处理厂问题的重要途径,而对于这类复杂的动态系统采用模糊控制,能得到其他控制方式无法实现的令人满意的控制结果[6-8]。曝气量控制决定污水处理的效果和污水处理厂的运行费用,对其进行有效合理的控制至关重要[9-10]。本文以分段进水A/O工艺系统为研究对象,根据前期的大量研究数据,设计污水生物脱氮过程的两种曝气量模糊控制系统,以期提高处理效果,降低运行费用,为工程实践提供合理的控制手段。
1 恒DO模糊控制
DO控制是活性污泥系统重要的控制参数。当DO传感器的稳定性和精确性足够高,且适用于实时控制时,曝气控制就引起了人们大量的关注和研究。恒定曝气控制是最简单最古老的控制方式,但是由于污水处理厂水质水量波动较大,采用恒定曝气不仅会造成能量浪费,也不能保证处理效果稳定。DO设定值控制是恒曝气基础上发展起来的一种改进型的曝气控制方式,通过控制曝气量维持反应器内DO浓度处于一个相对较优的设定值,可避免过量曝气的情况发生,也可保证处理效果。但由于系统的非线性特性,采用传统的过程控制器控制效果不甚理想,偏差较大。根据对溶解氧和曝气量的研究发现,即使在DO浓度低至0.5 mg/L时,通过恒DO控制仍然能获得较好的出水水质,还部分实现了同步硝化反硝化[11-12]。此外,研究曝气方式对污泥沉降性能的影响,结果表明:在低DO浓度下,DO设定值控制能在一定程度上抑制污泥膨胀的发生,或者改善已膨胀污泥的特性。本研究首先对恒DO模糊控制器的设计进行研究,为节约能量并保证硝化效果,好氧区DO设定值取1.0 mg/L。因此,这里建立的恒DO模糊控制器也可以称为分段进水A/O恒低DO模糊控制器。
1.1 控制变量的确定
采用应用最为普遍的二维控制器。以在线测得的DO浓度与给定的DO设定值的偏差E和偏差的变化量CE两者的综合信息作为模糊控制器的输入变量,以供气量的增量Δu作为模糊控制器的输出变量。
1.2 定义输入输出变量的模糊分布
根据运行经验和试验数据,恒DO模糊控制器的输入变量和输出变量的基本论域、模糊子集数目及隶属度函数如图1所示。这里仍然采用简单的三角形隶属函数。输入变量E,CE和输出变量Δu均选定7个模糊子集:NB=Negative big(负大), NM=Negative medium(负中),NS=Negative small(负小), O=Zero(零),PS=Positive small(正小),PM=Positive medium(正中),PB=Positive big(正大)。用于涵盖输入量和输出量的论域为[-1,1]、[-0.5,0.5]和[-0.4,0.4]。

图1 恒DO模糊控制器的输入变量E,CE和输出变量Δu的隶属函数
1.3 控制规则的建立
模糊控制规则是模糊控制器的核心,建立分段进水A/O工艺低氧曝气模糊控制规则时,必须以尽快消除偏差作为控制目的;由于低氧运行系统对进水负荷的变化较为敏感,因此,控制规则的制定必须注意防止对控制变量的超调,以保证系统稳定。根据上述原则和实际经验,编制出分段进水A/O工艺低氧恒DO模糊控制规则。由于DO控制的模糊逻辑关系较易理解,因此,选择表格型的表达方式,如表1所示。
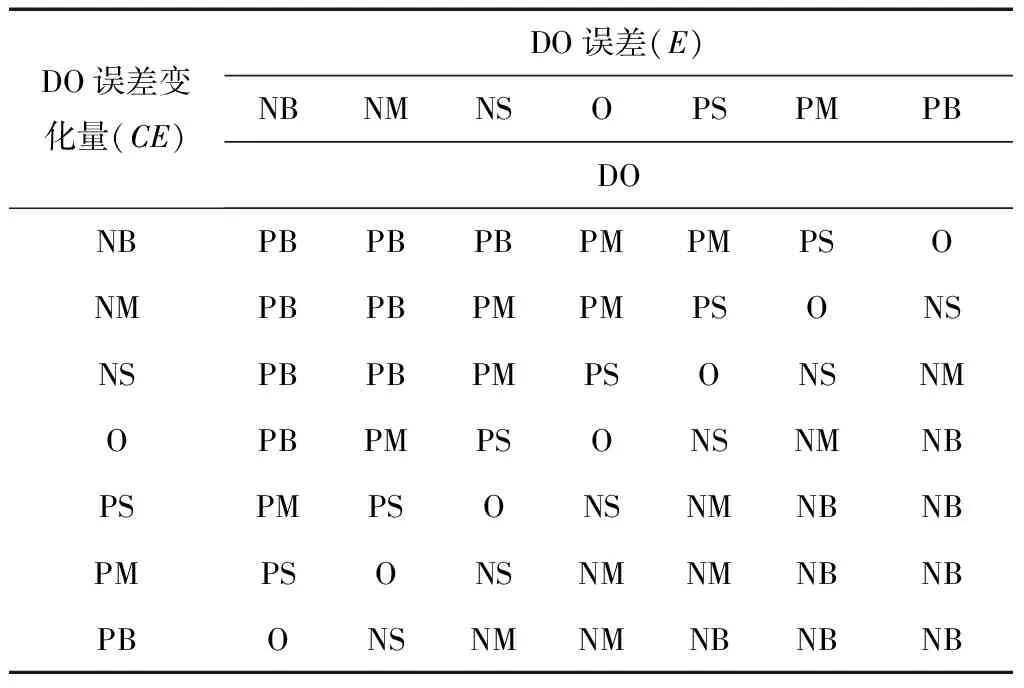
表1 分段进水恒低DO模糊控制规则
基于表1的模糊规则,利用Matlab的模拟工具箱,模拟控制规则的输入-输出传递特性曲面见图2。

图2 基于模糊控制规则控制器的响应情况
1.4 输出变量的去模糊化
本模型采用经典的Mamdani推理法,即MIN-MAX-重心法,将依据模糊控制规则输出的模糊变量,经论域反变换,得到供气量增量Δu的精确量。
2 DO前馈反馈模糊控制器
对恒DO模糊控制器的研究结果表明,当进水氨氮负荷急剧变化时,出水氨氮浓度有较大变化,对于实际污水处理厂,有不达标的危险,且由于反馈控制使得系统对扰动的响应存在一定滞后。因此,在恒低DO模糊控制器的基础上建立了DO前馈-反馈模糊控制器。
2.1 控制变量的确定
采用应用最为普遍的二维控制器。以在线测得进水氨氮浓度(NH3-Ninf)和出水氨氮浓度(NH3-Neff)为输入变量,以DO设定值作为模糊控制器的输出变量。
2.2 定义输入输出变量的模糊分布
根据运行经验和试验数据,DO前馈反馈模糊控制器的输入变量和输出变量的基本论域、模糊子集数目及隶属度函数如图3所示。仍然采用简单的三角形隶属函数。

图3 DO前馈-反馈模糊控制器的输入变量NH3-Ninf、NH3-Neff和输出变量DO设定值的隶属函数
为简化模糊控制器的结构,输入变量NH3-Ninf选定3个模糊子集,分别为S(small)、M(medium)和L(Large),用于涵盖输入量的论域为[0,100];输入变量NH3-Neff选定7个模糊子集:XS=very small(很小), S=small(小), MS=Medium small(中小),M=middle(中间),ML=Medium large(中大),L=large(大),XL=very large(很大),论域为[0,10];输出变量DO设定值也选定为7个模糊子集:XS=very small(很小), S=small(小), MS=Medium small(中小),M=middle(中间),ML=Medium large(中大),L=large(大),XL=very large(很大),论域为[0,5]。
2.3 控制规则的建立
建立分段进水A/O工艺前馈-反馈DO模糊控制规则,力求根据测得的进水氨氮浓度和出水氨氮浓度,及时消除进水扰动,避免出水超标的现象发生。根据系统运行特性和实际经验,建立分段进水A/O工艺DO前馈-反馈模糊控制规则如表2所示。
图4是基于控制规则模糊控制器的响应情况。系统输出近乎连续,曲面平滑无多峰现象,模糊控制规则可直接进行应用。

表2 DO前馈-反馈模糊控制规则
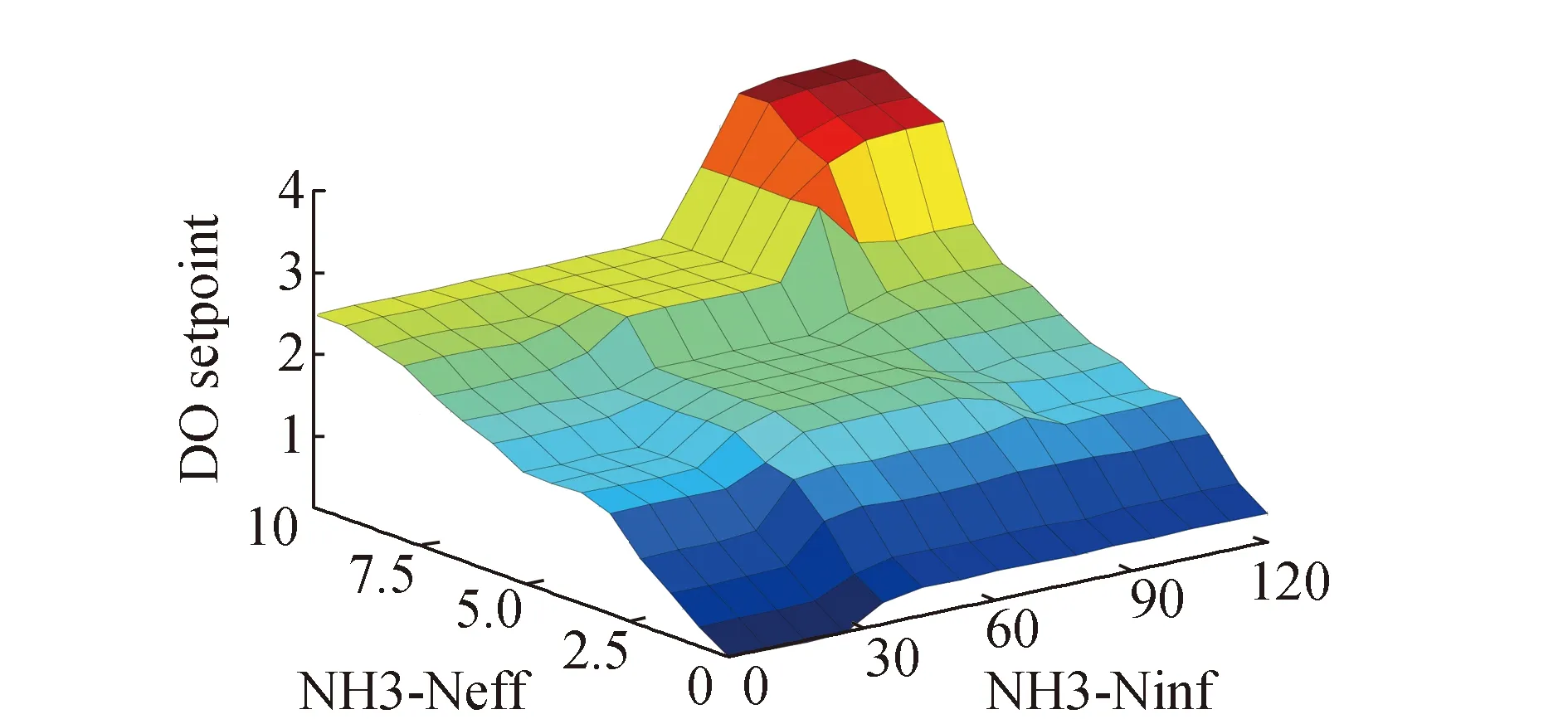
图4 基于模糊控制规则控制器的响应情况
2.4 输出变量的去模糊化
采用经典的Mamdani推理法,即MIN-MAX-重心法,将依据模糊控制规则输出的模糊变量,经论域反变换,得到DO设定值。
3 结束语
恒低DO模糊控制器可以很好地消除系统扰动,保证系统稳定。但当系统负荷突变时,由于反馈控制存在滞后,不能在很短的时间内消除扰动,会出现过度调节的状况。为加强控制效果,尽快消除系统扰动,建立DO前馈-反馈模糊控制器,以进水氨氮和出水氨氮浓度作为模糊控制器的输入变量,以好氧区DO设定值作为输出变量,根据进水负荷的变化来动态调整DO设定值,以便尽快消除扰动,满足处理效果,并保证系统稳定。模拟控制规则的输入输出特性曲面,其连续且无多峰现象,表明其可作为优化的控制方法用于实际工程。
[1] BOGER Z. Experience in Developing Models ofIndustrial Plants by Large-scale Artificial Neural Networks. Proceedings of Second New Zealand International Two-stream Conference on Artificial Neural Networks and Expert Systems[C].1995:326-329.
[2] GOSTA L,ROLF K. On-line and Off-line Expert Systems for the Operations of Wastewater Treatment Plants[J]. Water Sci Technol.1993,28(11/12):315-323.
[3] MA Y, PENG Y Z, WANG S Y. Intelligent Control Aeration and External Carbon Addition for Improving Nitrogen Removal [J]. Environmental Modeling Software,2006,21(6):821-828.
[4] 马勇,彭永臻.城市污水处理系统运行及过程控制[M].北京:科学出版社,2007.
[5] MANESIS S A, SAPIDIS D J, KING R E. Intelligent Control of Wastewater Treatment Plants[J]. Artificial Intelligence in Engineering.1998,12(3):275-281.
[6] TONG R M, BECK M B, LATTEN A. Fuzzy Control of the Activated Sludge Wastewater Treatment Process[J]. Automatica.1980,16(6):695-701.
[7] BARNETT M W. Knowledge Based Expert System Application in Wastewater Operation and Control[J]. ISA Transactions. 1992,31(1):53-60.
[8] TSAI Y P. Effluent Suspended Solid Control of Activated Sludge Process by Fuzzy Control Approch[J]. Wat Environ Res.1996,68(6):1045-1053.
[9] KALLER T J. Fuzzy Control of Aeration in an Activated Sludge Wastewater Treatment Plant: Design, Simulation and Evaluation[J]. Wat.Sci.Tech.1999,39(4):71-74.
[10] MEYER U,PÖPEL H J. Fuzzy-Control for Improved Nitrogen Removal and Engery Saving in WWT-Plants with Pre-denitrification[J]. Wat.Sci.Tech.2003,47(11):69-76.
[11] 王伟, 王淑莹, 孙亚男. 分段进水A/O工艺在低DO下处理生活污水研究[J].中国给水排水,2007,23(21):1-5.
[12] 王伟, 彭永臻, 王海东, 等. 溶解氧对分段进水工艺的影响[J].中国环境科学, 2006, 26(3):293-297.
[责任编辑:郝丽英]
Establishment of aeration fuzzy control rules in wastewater biological nitrogen removal system
WANG Wei, LIU Lina, ZHANG Xin
(College of Civil and Architectural Engineering, Heilongjiang Institute of Technology, Harbin 150050)
The aeration control is the most important issue in wastewater treatment system. Based on the numerous experiment data in step-feed anoxic-oxic(SFA/O) system, two kinds of aeration fuzzy control methods are established: a.constant DO fuzzy control; b.DO feed forward-feedback fuzzy control. The dynamic response of input and output is analyzed based on the fuzzy control rules. The result shows that the input-output performance curved surface is almost smooth and no multi-peak existed. The aeration fuzzy control rules are reasonable and can be applied to the practical engineering as an optimal control method.
wastewater; nitrogen removal; aeration; fuzzy control
2017-01-01
黑龙江省青年科学基金项目(QC2013C050)
王 伟(1979-),女,副教授,研究方向:污水生物处理及过程控制.
10.19352/j.cnki.issn1671-4679.2017.04.006
X703
A
1671-4679(2017)04-0023-04
猜你喜欢
湖北农机化(2021年7期)2021-12-07 17:18:46
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
测控技术(2018年10期)2018-11-25 09:35:52
西南交通大学学报(2016年3期)2016-06-15 20:29:35
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2016年2期)2016-02-27 09:04:56
电源技术(2015年11期)2015-08-22 08:50:38
自动化仪表(2015年5期)2015-06-15 19:01:34