自升式平台导向和桩腿非线性建模技术及分析
2017-09-03 05:24,,
中国海洋平台 2017年4期
, ,
(必维船级社(中国)有限公司 石油天然气技术中心, 上海 200111)
自升式平台导向和桩腿非线性建模技术及分析
宋长智,关放,唐广银
(必维船级社(中国)有限公司石油天然气技术中心,上海200111)
自升式平台在作业时,桩腿会和上下导向接触,使锁紧系统和上下导向间桩腿的弯矩重新分配。在一般的设计和评估计算中,采用直接连接上下导向和桩腿的方式,但是这样不能模拟实际的接触情形。根据规范SNAME中的非线性弹簧方法,采用ANSYS建立某自升式平台桩腿和上下导向的局部模型,计算接触情况下的弹簧刚度。采用SACS软件建立平台的整体模型,模拟上下导向和桩腿的非线性接触,最后计算平台的桩腿强度。结果发现:通过非线性接触模拟移动平台桩腿的受力情况,可以获得更准确的桩腿应力结果。
自升式平台;导向;桩腿;接触
0 引 言
经过半个多世纪的发展,自升式钻井平台在作业水深、抗风暴能力、可变荷载、钻井能力和操作性能等方面取得了较大进步,在海洋油气资源的开发中获得了广泛应用[1]。由于自升式平台的桩腿是支撑平台的主要结构,其应力水平是自升式平台计算、研究的重点。自升式平台在作业时桩腿会和上下导向发生接触,从而使锁紧系统和上下导向间的桩腿弯矩重新分配。由于桩腿与上下导向的接触难以进行准确的模拟,目前国内外对自升式平台桩腿的设计和评估计算[2]中,一般会直接连接导向和桩腿,根据经验和刚度分配弯矩。这样模拟的好处是简单方便,但是这样不能模拟实际的接触情形,不能确切真实地反映桩腿的实际受力情况。本文对自升式平台上下导向和桩腿间的非线性接触分析进行研究[3],能较准确地模拟整个受力过程,从而计算出桩腿较为真实和准确的应力水平,对自升式平台的桩腿强度分析有一定的参考意义。
1 平台参数及结构模型
本文研究的自升式平台是一艘三桩腿悬臂梁平台,平台主体为箱形结构,平面形状接近三角形。平台桩腿采用三角桁架式桩腿,艉二艏一 ,桩腿下端设有桩靴,最大作业水深为122 m。平台主尺度见表1。采用SACS软件建立平台的整体模型如图1所示。
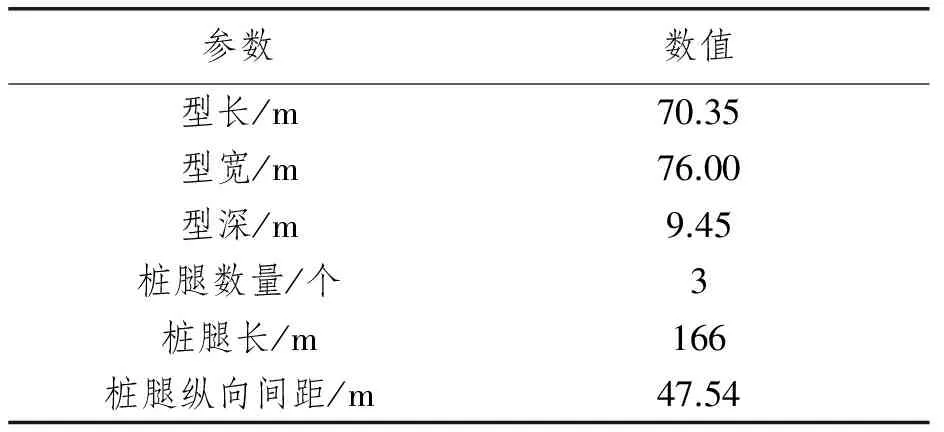
表1 半潜平台主要参数
2 平台荷载及约束
计算分析所采用的设计环境条件和计算工况见表2。100 m自存环境条件荷载见表3。

表2 自存工况波浪条件
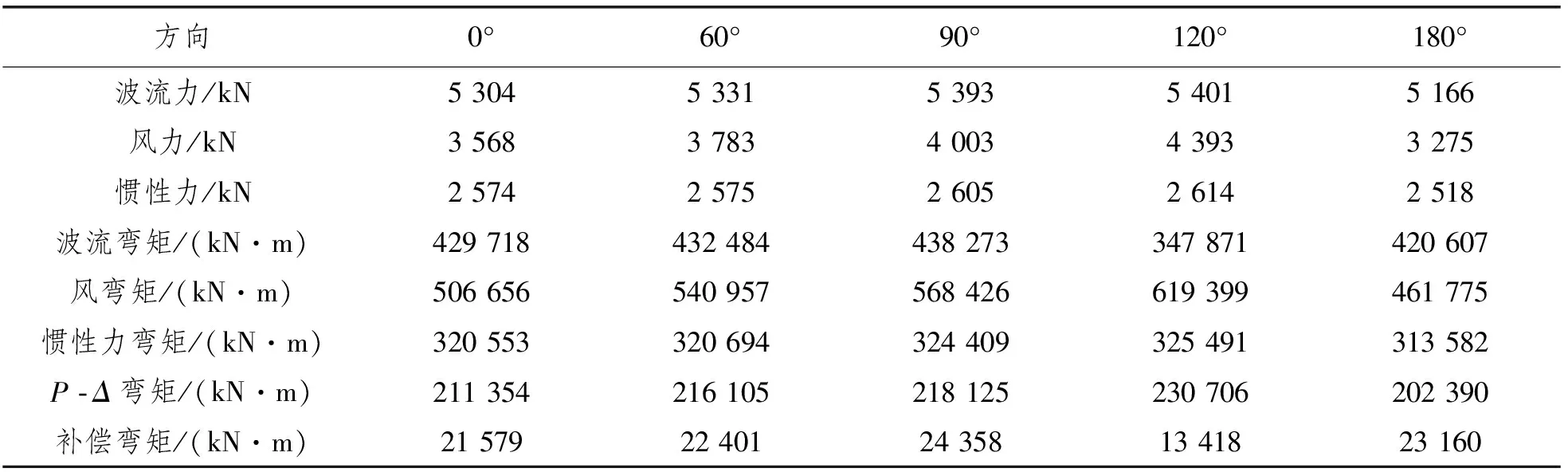
表3 自存100 m工况环境荷载
波流力采用SNAME规范[4]中等效的速度力系数Cd、惯性力系数Cm,计算公式如下:
式中:W为带齿条桩腿的等效密度;θ为波浪入射角度;CD0是规范要求的圆管在水里的拖曳力系数,光滑圆管CD0取0.65,粗糙圆管CD0取1.0;CD1是带有齿条的桩腿拖曳力系数,计算公式为
通过平台的模态分析计算出平台的固有周期,平台船体的等效船重为16 020 t(包括2 995 t的可变荷载),由于桩靴只有部分入泥,在最大入泥深度一半处采用铰接作为模拟时的边界条件[5]。
3 固桩架模拟与连接
自升式移动平台的固桩区主要包括上下导向以及锁紧系统,典型的固桩架齿轮箱截面如图2所示。计算模型在上下导向处只约束水平位移,锁紧系统约束z向位移和水平转角。
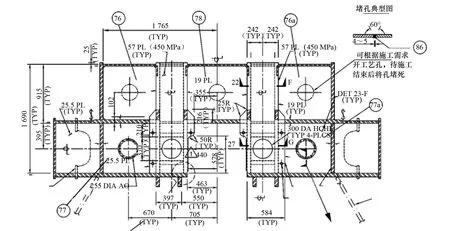
图2 齿轮箱典型截面
图3 固桩区模拟
模型采用双固桩架模拟,截面属性及刚度根据固桩架的齿轮箱截面计算得到,在上下导向处采用非线性GAP单元模拟非线性弹簧,将船体与桩腿连接,释放虚拟单元的自由度,只传递水平载荷;在锁紧与齿条连接处采用虚拟单元将船体与桩腿连接,释放虚拟单元的自由度,只传递垂向载荷。固桩区模拟方式如图3所示。
4 GAP单元弹簧刚度计算
SNAME规范[4]附录C 5.4中提出了一种非线性弹簧计算方法,可用于模拟桩腿和上下导向之间的接触。如图4所示,图中δ0为初始时桩腿和上下导向之间间隙,接触之后则等效为一个刚度为k的弹簧;Pc为桩腿的侧向压力;P0为模拟弹簧的反力,P0=kδ。该非线性弹簧的等效示意图如图5中实线所示。

图4 桩腿和导向接触过程示意图
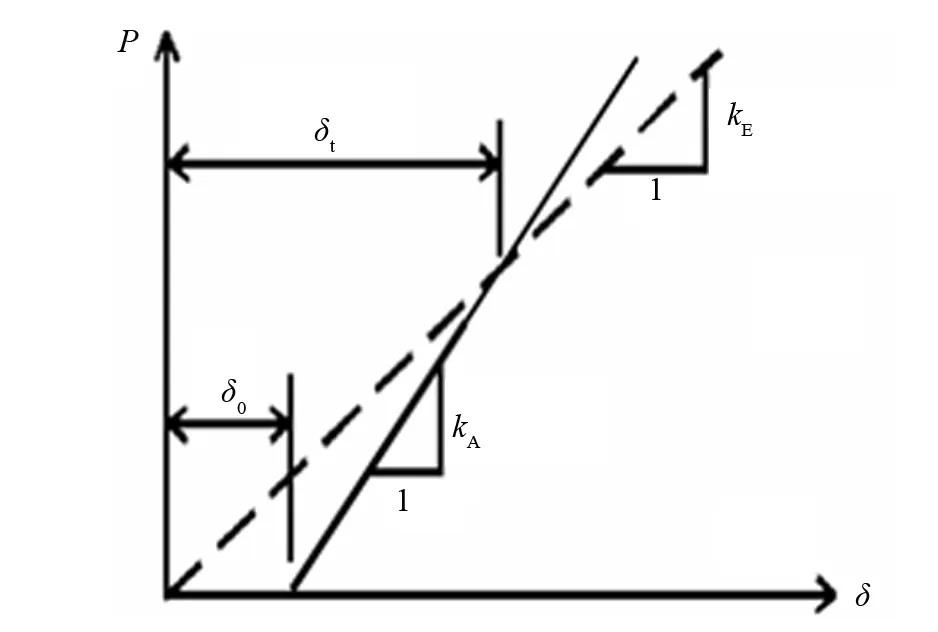
图5 桩腿和导向接触弹簧k线图
由图5可知:当δ≤δ0时,P=0;δ>δ0时,表示桩腿和导向接触之后等效为一个刚度为k的弹簧。规范中没有k的计算和取值方法,本文探讨如何模拟计算该接触刚度k,把非线性问题量化,再应用到桩腿的接触分析中。
利用ANSYS模型中的接触单元模拟桩腿和导向之间的面面接触过程[6-7],从而计算k值。对于非线性接触问题,由于接触过程中边界条件事先未知,无法使用自然变分原理,所以只能引入泛函数,变为无附加条件的变分原理,ANSYS中引入2种附加条件构造修正泛函数:
(1) 增广拉格朗日算子法
本文采用的计算方法是扩展的拉格朗日算子法,是在式(3)的基础上增加几个条件:① 设置允许最大穿透量,控制穿透。② 先采用罚函数方法计算最大穿透量,穿透超过时,增加接触力,再次迭代接触穿透。③ 控制最大穿透量,会导致可能的迭代步数减少或增加,但减少了惩罚刚度精度的影响。
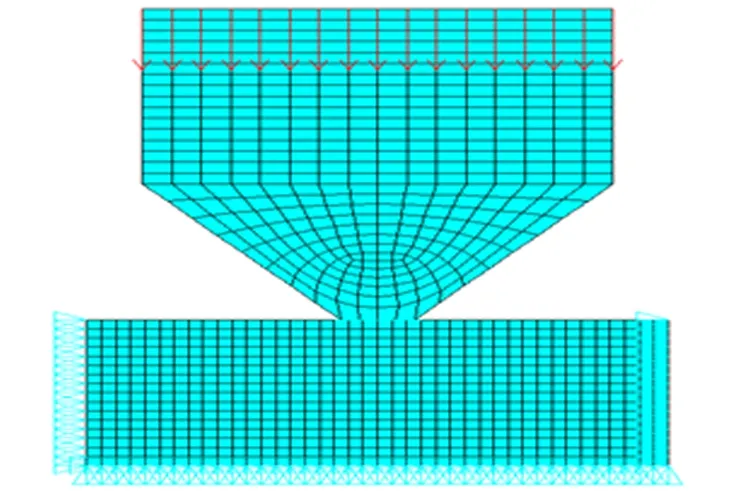
图6 齿条和导向接触ANSYS模型图
(2) 法向算子法,切向罚函数法
罚函数
式中:Kη为罚函数刚度函数;μη为接触面摩擦函数;而λi+1为
式中:uη为位移函数;λi为变量i的拉格朗日算子;ε为容许极限。
根据齿条的设计尺寸建立的ANSYS模型,如图6所示。定义接触单元类型为面面接触,接触算法为扩展的拉格朗日法,惩罚刚度系数为1.0,渗透系数为0.1,摩擦系数为0.3;求解模式设置为大位移静力模式,最小时间步长为0.001,时间步长为0.01,上部荷载为向下的均布荷载80 kN;约束方式为底部铰接,侧面约束x向位移。
计算得到von Mises应力结果如图7所示,最大应力在齿尖边缘处,同时应力由大到小均匀扩散,结果及应力分布形式较为合理。接触渗透结果如图8所示,由图8可知:应采用渗透平均值0.08 mm作为接触位移量。根据荷载和位移计算得弹簧刚度k=1 000 kN/mm。
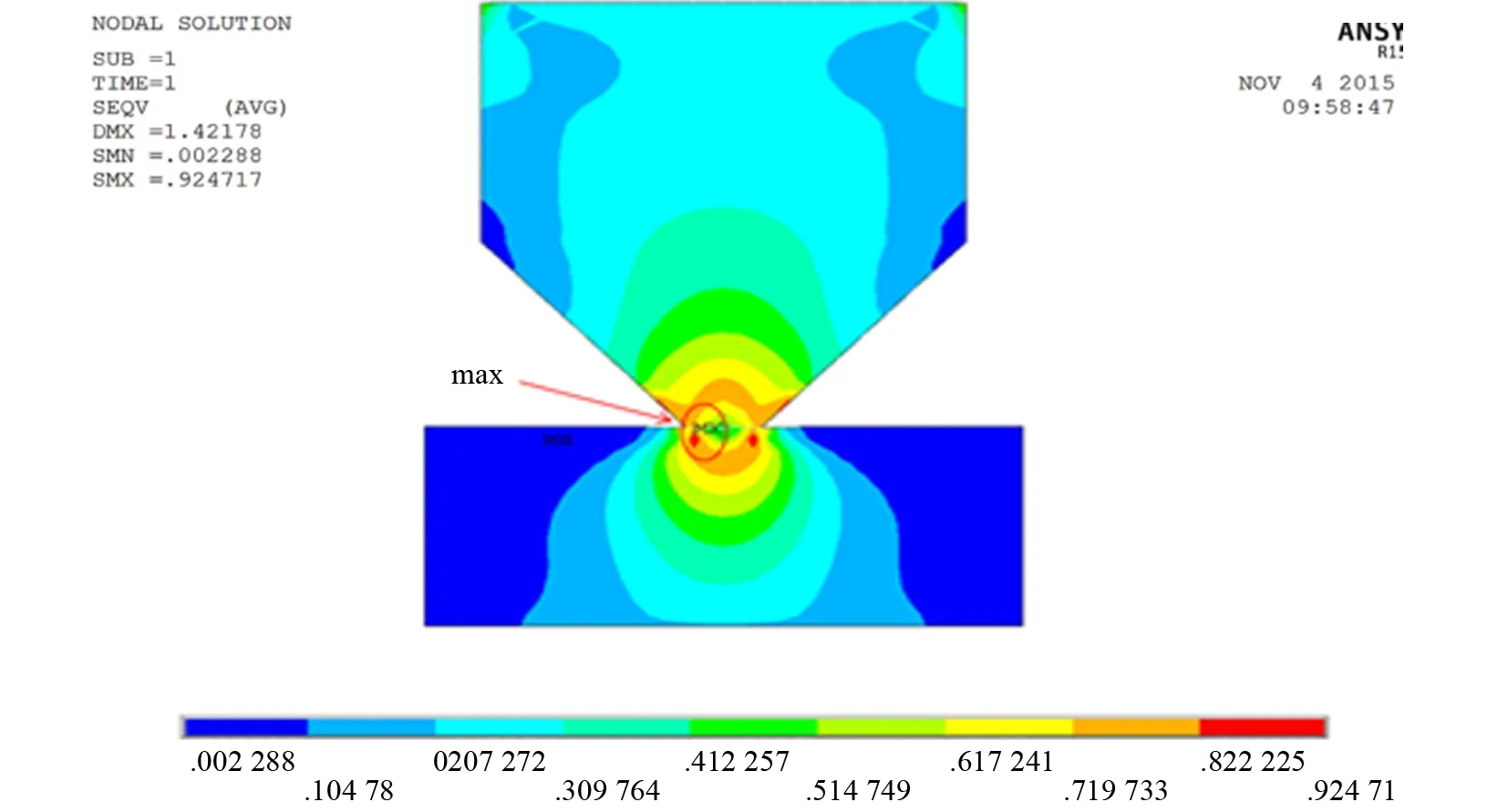
图7 von Mises应力云图
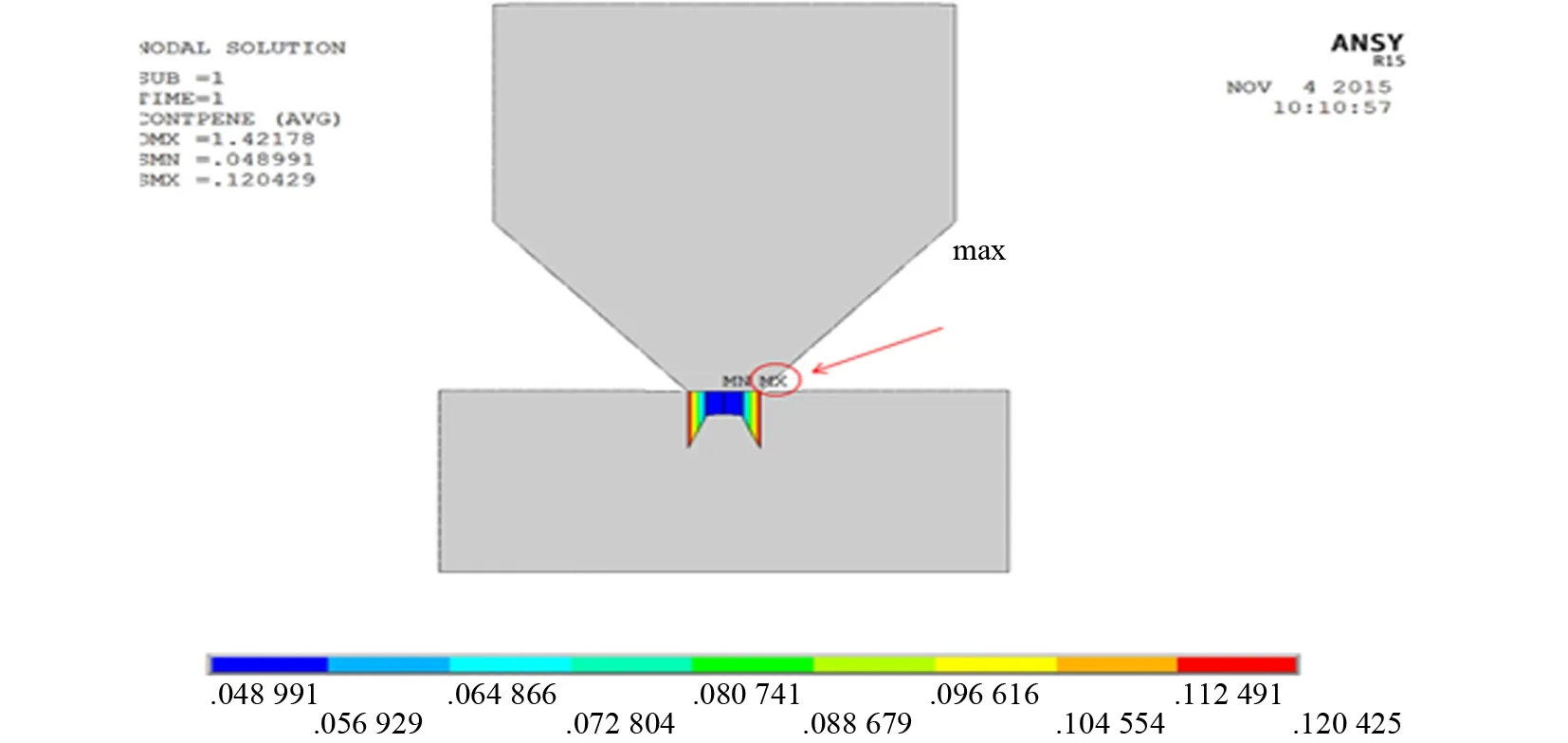
图8 接触渗透结果图
5 桩腿强度计算结果
SACS软件中的GAP单元可以模拟一些非线性分析,本文应用的非线性弹簧模拟桩腿和导向之间的接触情况,并通过迭代计算,模拟桩腿和导向间的传力情况,进而校核桩腿的强度。
本文平台的桩腿和导向之间间隙为3.0 mm,把ANSYS接触分析中计算得到的刚度k值在SACS的.gap输入文件中转化为力和位移的关系,然后对桩腿进行整体强度分析,模拟时设置GAP单元类型为F-D。100 m水深中某个工况的迭代结果见表4。
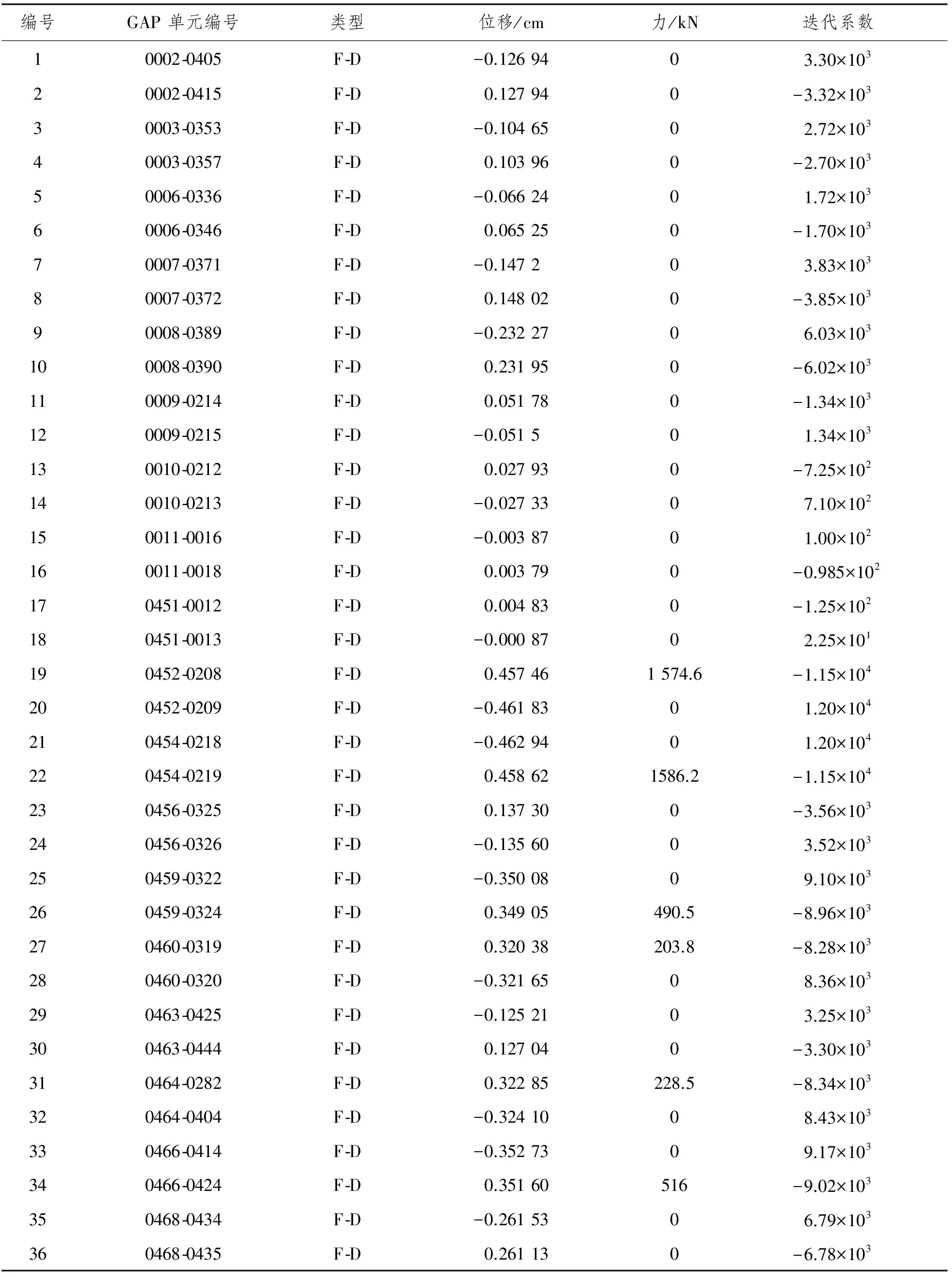
表4 SACS中GAP单元非线性迭代结果
由表4可以看出:在非线性接触分析中,当位移小于3 mm时,平台的固桩架没有和桩腿接触,此时所有GAP单元的内力均为0;当位移大于或等于3 mm时,GAP单元内产生内力,此时固桩架和桩腿开始接触,并且随着位移的变大受力愈来愈大,直到达到设计的最大距离,迭代结束。非线性迭代模拟方法满足第4节中SNAME规范[5]中附录C 5.4中的非线性弹簧方法,符合实际作业情况,计算结果较为准确。
按AISC规范[8]校核桩腿各部分的强度,在极端环境条件作用下,许用应力可提高1/3。杆件应力比见表5。采用直接连接导向和桩腿进行计算的结果见表6。
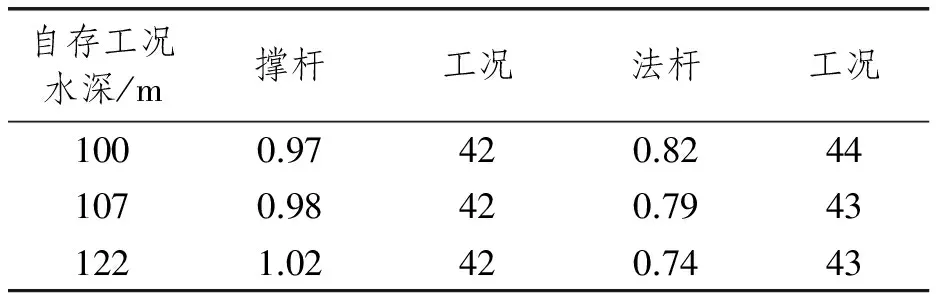
表5 GAP非线性分析各工况桩腿最大UC值

表6 直接连接各工况桩腿最大UC值
由表5和表6可以看出:采用非线性弹簧模拟的计算结果较优,和设计报告中根据经验采用上下导向分配7%左右弯矩的结果相近。从后处理结果的杆件UC值计算公式中可以看出:杆件的弯矩被重新分配。与直接静力算法相比,采用非线性方法模拟得到的UC值更小,说明弯矩分配更合理,桩腿和上、下导向的刚度模拟更准确,可以较好地模拟实际作业工况中桩腿的受力情况,平台刚度也更接近实际情况,从而使桩腿的计算结果更加合理。
6 结 语
本文通过实例分析,对自升式平台导向和桩腿间接触非线性分析进行探索性的研究,使用有限元分析方法,模拟自升式平台导向和桩腿间非线性接触,对比国内外一般设计方法,得到了更优的结果和更合理的分析方法。ANYSYS和SACS软件的结合使用,结合国际上通用的标准、规范,为平台的设计和优化计算上提供参考。
[1] 罗宏志,蒙占彬. 国内深水自升式钻井平台发展概况[J]. 中国海洋平台,2010(04):4-7.
[2] 丁勇. 自升式平台桩腿结构强度分析[D].上海:上海交通大学,2009.
[3] 任宪刚. 深浅海自升式平台结构非线性分析方法研究[D].哈尔滨:哈尔滨工程大学,2012.
[4] SNAME. Guidelines for Site Specific Assessment of Mobile Jack-Up Units [S].Technical & Research Bulletin 5-5A,2002.
[5] 中国船级社.海上移动平台入级规范[S]. 北京:人民交通出版社,2012:45-49.
[6] 李妍. 基于ANSYS软件的接触问题分析及在工程中的应用[D].吉林:吉林大学,2004.
[7] 郑银环,张仲甫. ANSYS接触分析在钢板弹簧设计中的应用[J]. 武汉理工大学学报(信息与管理工程版),2009(05):752-754.
[8] AISC.Manual of Steel Construction [S].13th ed.2005.
NonlinearModelingTechnologyandNonlinearAnalysisforGuideandLegsofSelf-ElevatingDrillingUnits
SONG Changzhi, GUAN Fang, TANG Guangyin
(Oil & Gas Technical Center of Bureau Veritas Marine (China) Co., Ltd., Shanghai 200111, China)
In the operating condition of a self-elevating drilling unit, the leg will contact to the guide, and make the bending moment redistribution. In general design and evaluation, it is directly connected with the guide and legs, but this can not simulate the contact situation actually. A nonlinear spring method according to the SNAME is applied to a self-elevating drilling unit. ANSYS is used to establish the part model of the leg and the guide, and the spring stiffness of the contact is calculated by the surface contact analysis. The overall model of the platform is built in SACS, and the GAP unit of SACS is used to simulate the nonlinear contact between the guide and the leg, then the leg strength is obtained. It can be found that nonlinear contact simulation can simulate the force of the leg of the mobile platform better and obtain more accurate results of the pile leg stress.
self-elevating drilling unit; guide; leg; contact
2015-11-17
宋长智(1987-),男,工程师
1001-4500(2017)04-0090-07
TE53
: A
猜你喜欢
内江科技(2022年8期)2022-10-12
中国水运(2022年4期)2022-04-27
模具制造(2022年1期)2022-02-23
海洋石油(2021年3期)2021-11-05
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
安徽水利水电职业技术学院学报(2018年4期)2019-01-05
安徽建筑(2018年6期)2018-11-12
新高考·高一物理(2016年10期)2017-07-07
山东工业技术(2016年12期)2016-06-13
船海工程(2015年4期)2016-01-05