三相四开关逆变器供电的IPMSM直接转矩控制系统建模与分析
2017-08-31 19:02:23袁庆伟赵荣祥
电工技术学报 2017年15期
袁庆伟 赵荣祥,2
(1.浙江大学电气工程学院 杭州 310027 2.电力电子应用国家工程研究中心 杭州 310027)
三相四开关逆变器供电的IPMSM直接转矩控制系统建模与分析
袁庆伟1赵荣祥1,2
(1.浙江大学电气工程学院 杭州 310027 2.电力电子应用国家工程研究中心 杭州 310027)
为获得较高的转矩响应速度和较低的转矩脉动,将基于比例-积分控制器和空间矢量调制的直接转矩控制(PI-SVM DTC)引入到由三相四开关逆变器供电的凸极式永磁同步电机(IPMSM)驱动系统中。鉴于电机的强耦合性,同时为便于分析其定子磁链环,建立了IPMSM在静止坐标系下以定子磁链为状态变量的状态空间模型。为改善系统的稳态性能,构建无差拍全阶状态观测器,实现对定子磁链的闭环观测。揭示了传统定子磁链环极点放置位置存在的问题,并利用一种简单的方法对定子磁链环极点位置进行优化。对PI-SVM DTC的转矩环进行建模分析,为PI控制器的设计提供依据。另外,为抑制三相四开关逆变器直流母线中性点电压偏移,根据其偏移量生成合适的补偿量,并将其添加到定子磁链控制环中。实验结果验证了该模型的有效性。
凸极式永磁同步电机 三相四开关 直接转矩控制 状态空间 中性点电压偏移
0 引言
凸极式永磁同步电机(Interior Permanent Magnet Synchronous Motor,IPMSM)具有高效率、高转矩电流比以及结构简单等优点,被广泛应用在风力发电、电动汽车以及电气传动等领域[1-3]。为降低IPMSM驱动系统的成本,三相四开关逆变器(Three-Phase Four-Switch Inverter,TPFSI)受到越来越多的关注。另外,当三相六开关逆变器构成的驱动系统发生单相桥臂故障时,该拓扑可为其提供容错运行能力[4-9]。直接转矩控制(Direct Torque Control,DTC)由于具有简单的控制结构、较高的转矩响应速度和较低的参数依赖性等优点,自提出后就受到广泛关注[10,11]。基于三相六开关逆变器的IPMSM DTC已被详细分析和讨论,而由三相四开关逆变器供电的IPMSM DTC的性能却有待提高。
与三相六开关逆变器相比,三相四开关逆变器仅有4个电压矢量,且无零矢量,因此在采用开关表的DTC中,对于由TPFSI驱动的IPMSM控制系统,其转矩脉动更大[12]。为减小电机的转矩脉动,文献[13,14]对已有的电压矢量进行结合,模拟三相六开关DTC运行。但此类采用开关表的DTC方案都存在开关频率不固定、转矩和定子磁链脉动大的问题。
为减小电机的转矩脉动,文献[15,16]将转矩预测控制引入到三相四开关逆变器DTC中,根据目标函数来选择下一开关周期内施加的电压矢量。但该方案需根据电机参数来计算电机的转矩轨迹和磁链轨迹,参数敏感性高,计算量较大。当控制对象为IPMSM时,由于其d、q轴电感不相等,计算转矩轨迹的表达式很复杂,增加了该方案实施的难度。
文献[6]将空间电压矢量调制(Space Vector Modulation,SVM)引入到三相四开关逆变器DTC中,以此来减小电机的转矩脉动,并固定系统的开关频率。然而,文献[6,17]中所提的SVM方案并未考虑由TPFSI直流母线中性点电压波动所引起的电压矢量幅值和相位的变化,不能实现对电机转矩和定子磁链幅值的精确补偿。为此,文献[18]采用标量脉宽调制(Pulse Width Modulation,PWM)方法,根据实测的直流母线中性点电压偏移量,对系统的调制波信号进行补偿。文献[19]将实测的直流母线上下电容电压直接引入到TPFSI两相占空比的计算中,通过归纳总结,推导出适用于整个矢量平面的两相占空比表达式。
在三相四开关逆变器DTC中,当开关表被SVM模块代替时,控制系统的主要任务是通过各种算法求取参考电压矢量。传统的适用于三相六开关逆变器的PI-SVM DTC策略可以被移植到三相四开关逆变器DTC中[20],而且该方案算法比较简单,易于在IPMSM中实施。但文献[20]仅对PI-SVM DTC的基本原理进行了阐述,并未进行详细的建模分析。文献[21]通过大量简化与等效,揭示了PI-SVM DTC中转矩环的等效模型。但该模型忽略了定子磁链环对电机转矩响应的影响。在PI-SVM DTC中,转矩环利用PI控制器对电机的输出转矩进行调节,因此PI控制器的参数会对转矩的动静态性能产生很大的影响。当使用不合适的PI参数时,转矩的动静态性能会被恶化,甚至影响整个系统的稳定运行。
另外,由于三相四开关逆变器的直流母线中性点与负载某相直接相连,当此相电流中存在直流偏置时,直流母线的中性点电压中会产生相应的直流分量。鉴于三相四开关逆变器的线性调制区域受电容电压的最小值限制,因此,为增大其线性调制区域,保证其正常运行,必须对其中性点电压进行控制,消除其直流偏置。文献[22]根据两电容电压的实际情况,通过施加不同的电压矢量对电压高的电容进行放电。该方案在抑制中性点电压直流偏置的同时恶化了系统的电流品质。文献[23]根据中性点的直流偏置,在给定转矩中添加相应的补偿分量。文献[4,19]利用中性点的直流偏置,在与中性点相连的负载相电流的期望值中添加相应的补偿量。但以上两种方法均需在特定的场合才能实现对中性点电压直流偏置的有效抑制。
本文对由三相四开关逆变器驱动的凸极式永磁同步电机PI-SVM DTC方案进行了详细的建模与分析。考虑到电机模型的强耦合性,同时为便于分析IPMSM定子磁链环对转矩响应的影响,建立了IPMSM在静止坐标系下以定子磁链为状态变量的状态空间模型。定子磁链作为反馈量,其观测精度直接影响到整个系统的稳态性能。为此,本文构建了一个无差拍全阶状态观测器,对定子磁链实施闭环观测。然后,分析了传统定子磁链环极点放置位置存在的问题,利用一种简单方法对定子磁链环的极点放置位置进行优化,并确定了定子磁链矢量的前向增益矩阵,优化了定子磁链环的性能。随后,对PI-SVM DTC的转矩环进行了建模分析,为PI控制器的参数设计提供了依据。
此外,为抑制三相四开关逆变器直流母线中性点电压中的偏置量,针对PI-SVM DTC,本文在分析中性点电压与负载相电流之间关系的基础上,利用一种简单算法从波动的中性点电压中提取出直流偏置,然后根据该直流偏置生成合适的补偿量,并将其添加到定子磁链控制环中,实现了对中性点电压的有效控制。实验结果验证了本文所提的由三相四开关逆变器驱动的凸极式永磁同步电机PI-SVM DTC的有效性。
1 三相四开关逆变器和IPMSM数学模型
由三相四开关逆变器驱动的IPMSM系统主电路结构如图1所示,开关管S1~S4和电容C1、C2构成了三相四开关逆变器,IPMSM的A相与TPFSI直流母线的中性点直接相连。电容C1和C2上的电压降分别为uC1和uC2,流过的电流分别为idc1和idc2,逆变器输出的三相电流分别为isa、isb和isc。
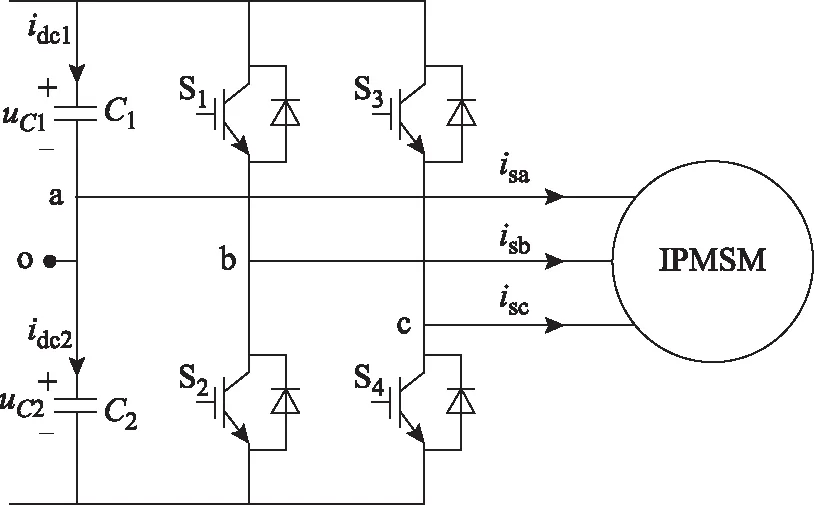
图1 三相四开关逆变器驱动的凸极式永磁同步电机主电路结构Fig.1 Schematic diagram of three-phase four-switch inverter fed IPMSM
文献[19]已对三相四开关逆变器的基本原理及其SVM调制算法进行了详细的分析和研究,本文不再赘述。
1.1 IPMSM连续域数学模型
IPMSM在dq坐标系下的电压方程为
(1)
式中,usd、usq分别为定子电压的d、q轴分量;isd、isq分别为定子电流的d、q轴分量;ψsd、ψsq分别为定子磁链的d、q轴分量;Rs为定子电阻;ωr为IPMSM的电角速度。
定子磁链在dq坐标系下的表达式为
ψsd=Ldisd+ψf
ψsq=Lqisq
(2)
式中,Ld、Lq分别为IPMSM的d、q轴电感;ψf为永磁体磁链。
将其变换到两相静止坐标系下,可得
(3)
式中,ψsα、ψsα分别为定子磁链的α、β轴分量;isα、isβ分别为定子电流的α、β轴分量;θr为IPMSM转子位置电角度;Lα、Lβ分别为IPMSM的α、β轴等效自感;Lαβ为α、β轴之间的等效互感。
将式(1)变换到静止坐标系下,并根据式(3)消去表达式中的电流分量,可得
(4)
式中,usα、usβ分别为定子电压的α、β轴分量;X、Y和M分别为
静止坐标系下的定子电流为
(5)
IPMSM的转矩输出为
(6)

根据式(6),转矩关于δ的导数kTe可表示为
(7)
1.2 IPMSM离散域的状态空间模型
鉴于电机是一个多变量强耦合的系统,本文构建IPMSM的状态空间模型,同时为揭示电机定子磁链环对转矩响应的影响,选取ψsα、ψsβ为状态变量,usα、usβ为输入变量,isα、isβ为输出变量。选取式(4)作为状态方程,式(5)作为输出方程。为便于数字实现,需对IPMSM的状态空间模型进行离散化处理。假设采样周期为Ts,经过一定的简化处理,离散后的电机模型可表示为
x(k+1)=G(k)x(k)+Hu(k)
(8)
y(k)=C(k)x(k)
(9)
式中,状态变量x=[ψsαψsβ]T;输入变量u=[usαusβ]T;输出变量y=[isαisβ]T;矩阵G(k)、H和C(k)分别为
(10)
(11)
(12)
因此,IPMSM离散域状态空间模型对应的结构框图如图2所示,其中I为二阶单位矩阵,Δx(k)和Δy(k)为简化模型所添加的补偿量,可分别表示为
(13)
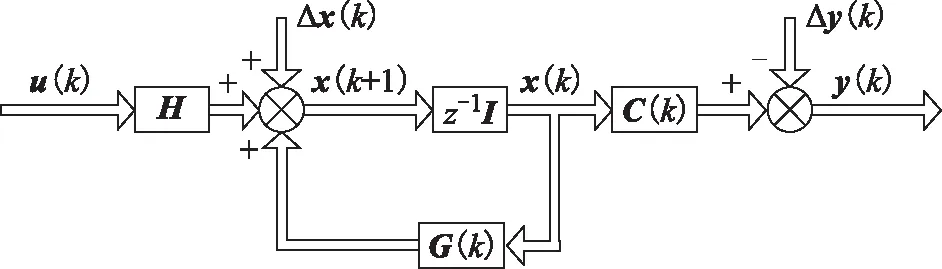
图2 IPMSM离散域状态空间模型结构框图Fig.2 Block diagram of the state-space model for IPMSM in discrete-time
2 基于三相四开关逆变器的PI-SVM DTC

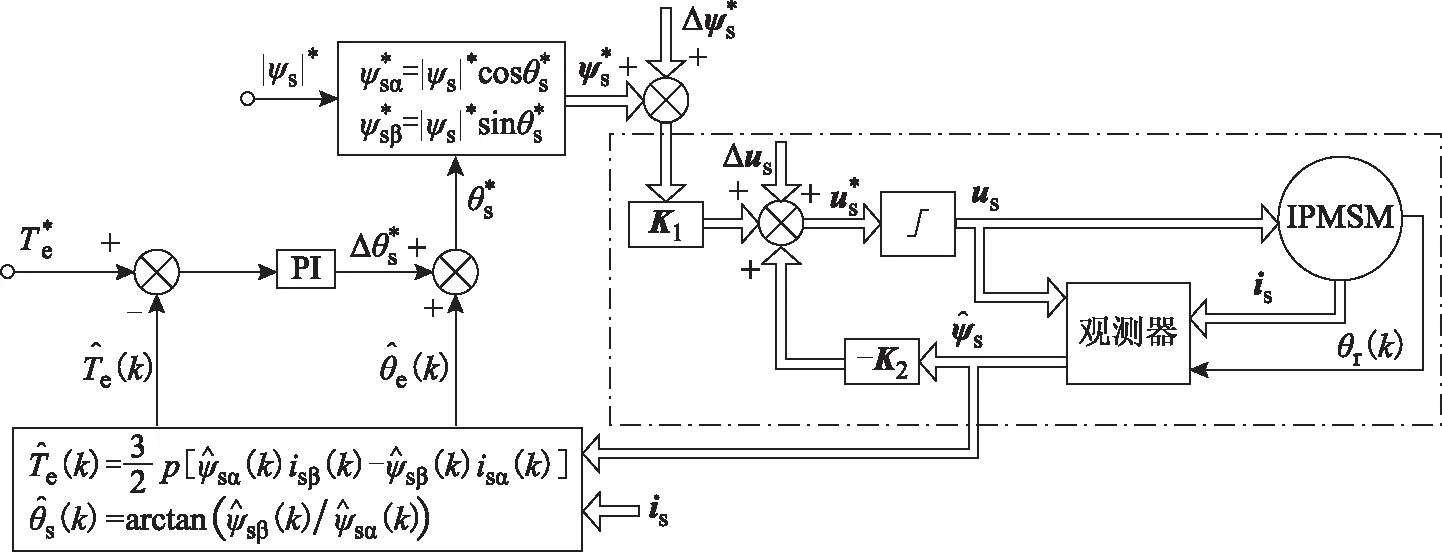
图3 基于三相四开关逆变器的PI-SVM DTC结构框图Fig.3 Block Diagram of the PI-SVM DTC scheme using three-phase four-switch inverter
IPMSM定子端的电压矢量。电流矢量is由电流传感器直接测量,转子位置角θr(k)由增量式光电编码器提供。
2.1 定子磁链控制环
2.1.1 无差拍全阶定子磁链观测器
定子磁链矢量的期望值由转矩环提供,但其实际值不能被直接测量,只能通过其他已知量对其进行估算。为提高定子磁链估算模块的参数稳定性,本节根据式(8)和式(9)所提供的离散IPMSM状态空间模型,在检验了系统的能观性之后,构建了定子磁链的全阶状态观测器。其表达式为
(14)


(15)
定子磁链全阶状态观测器结构框图如图4所示。
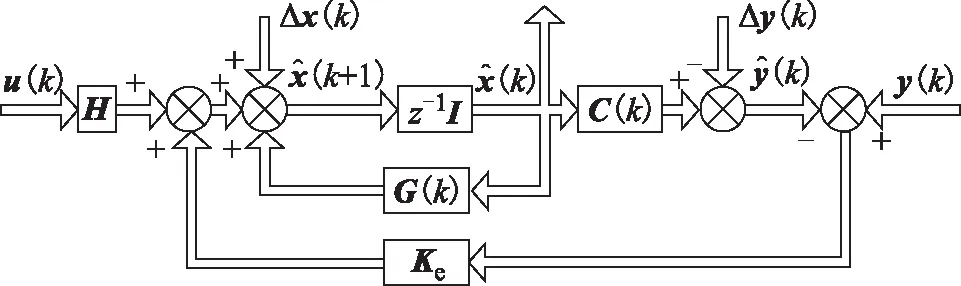
图4 定子磁链全阶状态观测器结构框图Fig.4 Block diagram of full-order state observer for the stator flux
将式(15)代入式(14)中,可得
(16)
e(k+1)=[G(k)-KeC(k)]e(k)
(17)
由式(17)可知,观测器反馈增益矩阵Ke的选择影响定子磁链观测误差e(k)的动态性能。鉴于状态观测器不是一个硬件结构,而是在DSP中通过编程来实现的,可通过选择Ke使观测器实现无差拍响应。
状态观测器的特征方程为
(18)
为简化计算,Ke可选择为
(19)
对于具有无差拍响应特性的观测器来说,其特征方程需满足z2=0,因此Ke中的参数需满足
(20)
(21)
至此,通过式(16)可利用定子电压和直接测量的定子电流快速估算出定子磁链矢量。
2.1.2 参考电压矢量的计算
鉴于定子磁链估算模块采用无差拍控制,可忽略其对定子磁链环响应速度的影响。由图3可知,为计算参考电压矢量,需分别确定前向增益矩阵K1和状态反馈矩阵K2。在静止坐标系下,定子电压与定子磁链的关系为
(22)
式中,[RsisαRsisβ]T对应图3中的Δus。根据式(22),本文直接令K1=K2,当状态反馈矩阵K2确定时,就可求得期望的定子电压矢量。
假设实际的定子磁链等于估算的结果,在图2所示的IPMSM电机模型中引入状态反馈,通过选择合适的状态反馈矩阵K2,可将闭环系统的极点放置在期望的位置上,其结构如图5所示。
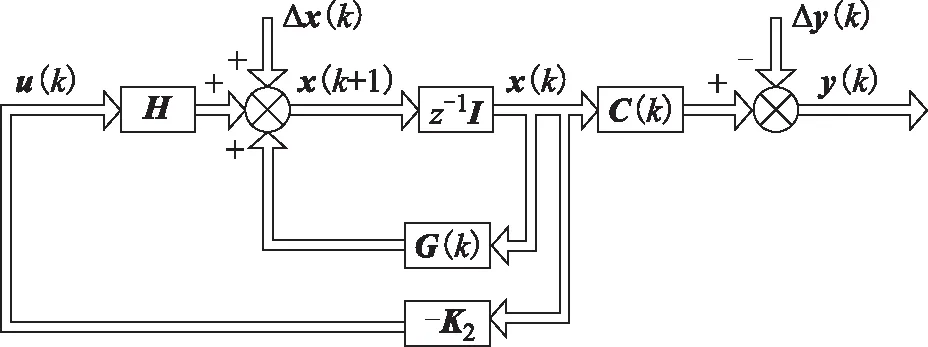
图5 定子磁链控制环结构框图Fig.5 Block diagram of the stator flux control loop
根据式(8),可得IPMSM开环系统的特征方程为
(23)
由式(23)可知,原系统有两个不等实根。在检测了IPMSM的能控性后,令u(k)=-K2x(k),也即引入状态负反馈。为便于闭环系统的调试,经反复尝试,取K2为如下形式
(24)
此时,闭环系统的特征方程为
=0
(25)
在式(25)中,通过改变参数m的值就可移动闭环系统极点的位置,改变闭环系统的性能。
文献[20]直接根据式(22)选择两个矩阵K1和K2,也即取m=1。
(26)
此时,闭环系统有两个不相等的负实根,且离原点很近。这两个z平面负实轴上的根会使系统的动态性能变差。而且它们又离原点很近,需要外部提供幅值很高的输入信号,也即逆变器能够提供幅值很高的定子电压。
因此,为改善系统的动态性能,本文通过改变参数m的取值,将闭环系统的两个极点移动到z平面的正实轴上。同时通过调节参数m,在给定逆变器直流母线电压的条件下,获得较高的响应速度。
当状态反馈矩阵K2确定时,参考电压矢量的表达式为
(27)
2.2 转矩环模型

图 6 PI-SVM DTC转矩环的结构示意图Fig.6 Block diagram of the torque control loop for PI-SVM DTC scheme
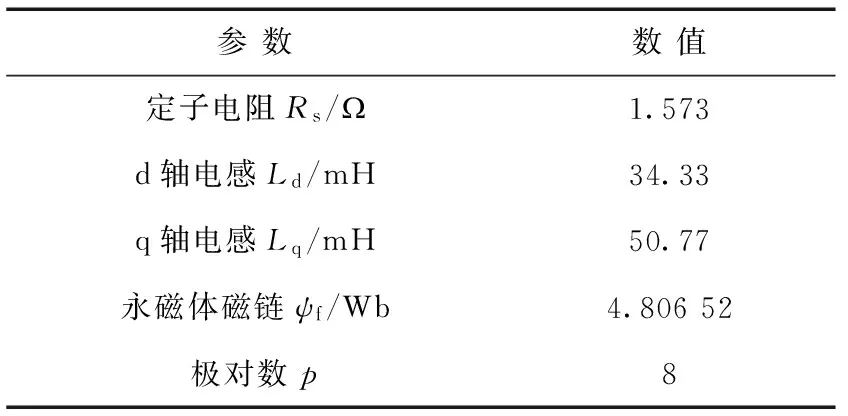
参数数值定子电阻Rs/W1.573d轴电感Ld/mH34.33q轴电感Lq/mH50.77永磁体磁链ψf/Wb4.80652极对数p8
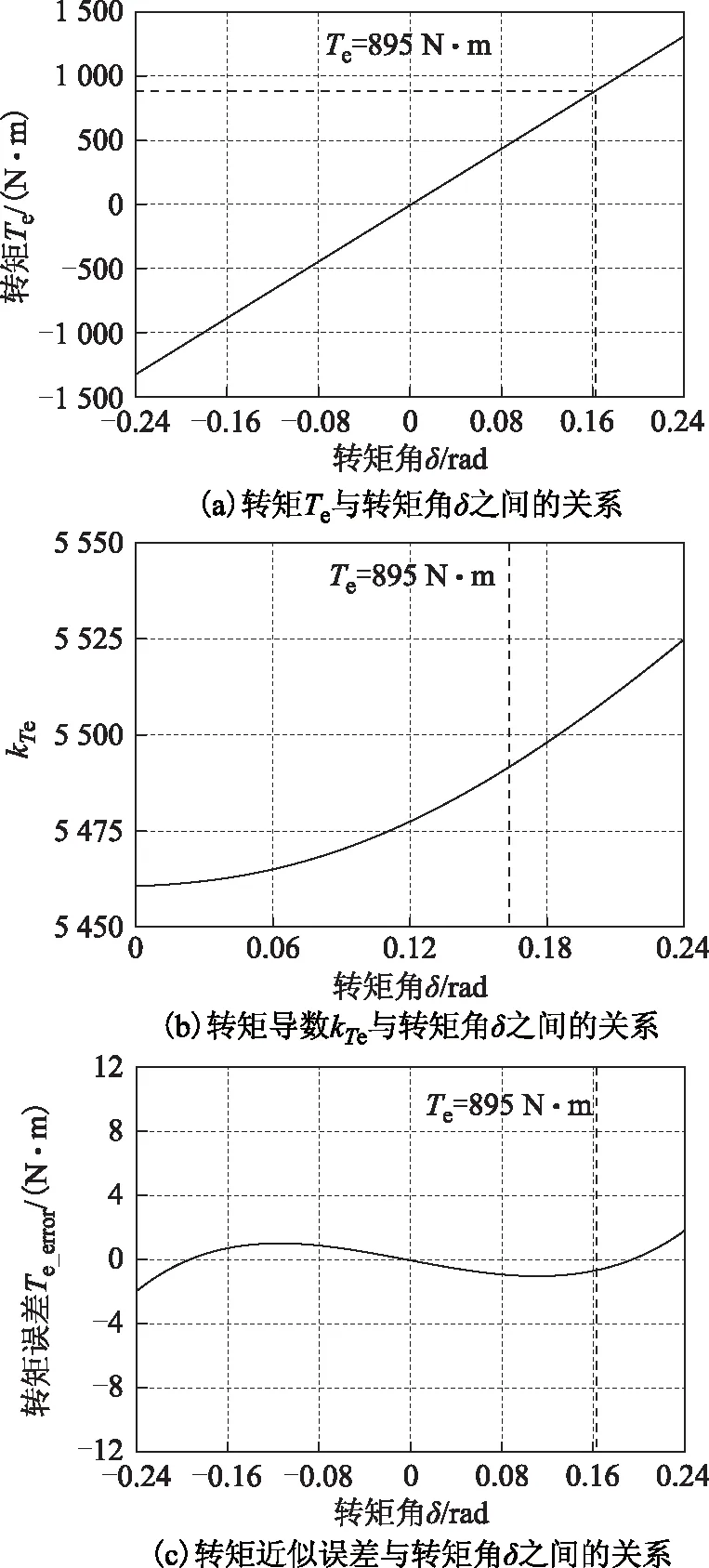
图 7 转矩Te与转矩角δ Fig.7 The relationship between Te and δ
如图7a所示,转矩Te与转矩角δ之间呈近似正比关系,根据图7b所示的kTe与δ之间的关系,取kTe为5 475。由此,针对实验所用的IPMSM,式(6)所示的转矩表达式可简化为
Te≈kTeδ
(28)
定义Te_error为式(6)所求得的转矩与式(28)所求得的转矩之间的差值,其与转矩角δ之间的关系如图7c所示。可见,通过式(28)所求得的转矩在额定转矩范围内只存在不超过 2 N·m的误差,对于本文所用IPMSM,基本上可以忽略该误差量。
由此可得到PI-SVM DTC转矩环的控制结构框图如图8所示。可见,kTe的选择只会影响转矩控制环的开环增益。但由于kTe的变化量很小,且是转矩闭环控制,将不会在IPMSM的转矩输出中引入误差。根据图8即可列写转矩环的传递函数,并进行PI控制器设计。
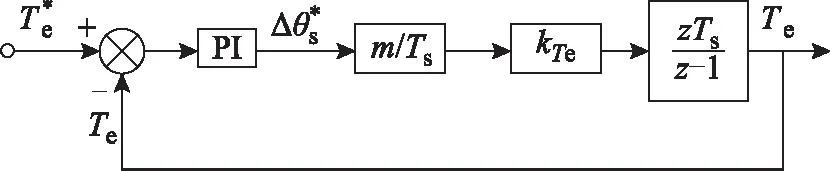
图8 PI-SVM DTC转矩环控制结构框图Fig.8 Control structure of the torque control loop for PI-SVM DTC
3 直流母线中性点电压控制
如图1所示,在三相四开关逆变器驱动的IPMSM系统中,直流母线的中性点o直接与电机A相相连,此时,电机的A相电流会通过电容C1和C2进行环流,这将导致直流母线o点上的电压发生低频波动。在电机瞬态过程中,A相电流中会出现一定的直流偏置,这将对电容C1和C2进行不对称充、放电。
忽略相电流中的高次谐波,负载三相电流为
(29)
式中,Is为相电流幅值;θi为电流矢量的位置角;i0为相电流中存在的直流分量。
将三相电流变换到静止坐标系下可得
(30)
可见,直流偏置i0只出现在isα中,isβ中只存在交流量。
假设图 1中两电容C1=C2=C,则
(31)
定义中性点电压Δu=(uC1-uC2)/2,并将式(29)代入式(31)中,并在式(31)等号两端分别施加积分环节,经整理后可得
(32)
式中,θi0为电流矢量的初始相位角;Δu0为中性点电压的初始值;t为时间变量。由此可知,相电流isa的初始相位同样会引起中性点电压的偏移,而且此偏移量不随时间的变化而消失。因此,为消除中性点电压的偏移,可根据中性点电压中直流偏置的大小,在相电流中注入合适的直流分量。
为获得期望的相电流直流分量,需先从波动的中性点电压中提取出直流分量。传统方法使用低通滤波器滤去中性点电压中的交流分量。为充分衰减中性点电压中的交流分量,需将低通滤波器的截止频率设置的很低。但这样会严重影响中性点控制回路的响应速度。为此,本文提出了一种简单的中性点电压直流偏置提取方案。考虑到中性点电压中基波分量Δuac占主要成分,根据式(32)和式(30)可得
(33)
中性点电压的直流偏置Δudc可表示为
(34)

(35)
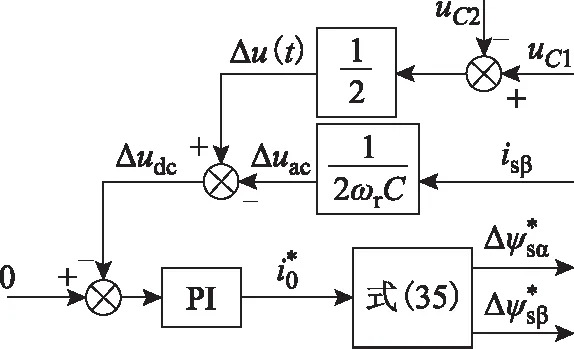
图9 直流母线中性点电压控制原理Fig.9 Schematic diagram of the neutral point voltage control
直流母线中性点电压控制回路可以等效为图10所示的结构,其中Gψ-close为定子磁链控制回路的闭环传递函数,这里取Gψ-close1。根据图10即可列写直流母线中性点电压控制回路的传递函数,并进行PI控制器的参数设计。

图10 直流母线中性点电压控制回路Fig.10 The control loop for the neutral point voltage of DC-link
4 实验结果
为验证本文所提的系统模型的可行性,搭建由三相四开关逆变器供电的IPMSM驱动系统,其结构如图11 所示。TMS320F2808 DSP用来进行信号处理并生成B相和C相的驱动信号。直流母线由电容C1和C2串联组成,C1=C2=2 400 μF,并将其中性点与IPMSM的A相直接相连,实验中直流母线电压udc固定为600 V。电机系统由一台7.5 kW的IPMSM和5 kW 的IPMSG构成。本文实验主要针对IPMSM,其参数见表1。对于IPMSG本文不做研究,直接用一台安川A1000变频器驱动,控制电机系统的转速。电机的转子位置由IPMSM侧的增量式光电编码器提供,其分辨率为10 000 p/r。为检测IPMSM转矩环的动、静态性能,本文使IPMSM运行在发电状态,IPMSG运行在电动状态,能量从安川A1000变频器经IPMSG传递到IPMSM上。因此,当电机系统的转速为正时,IPMSM的转矩输出为负值。
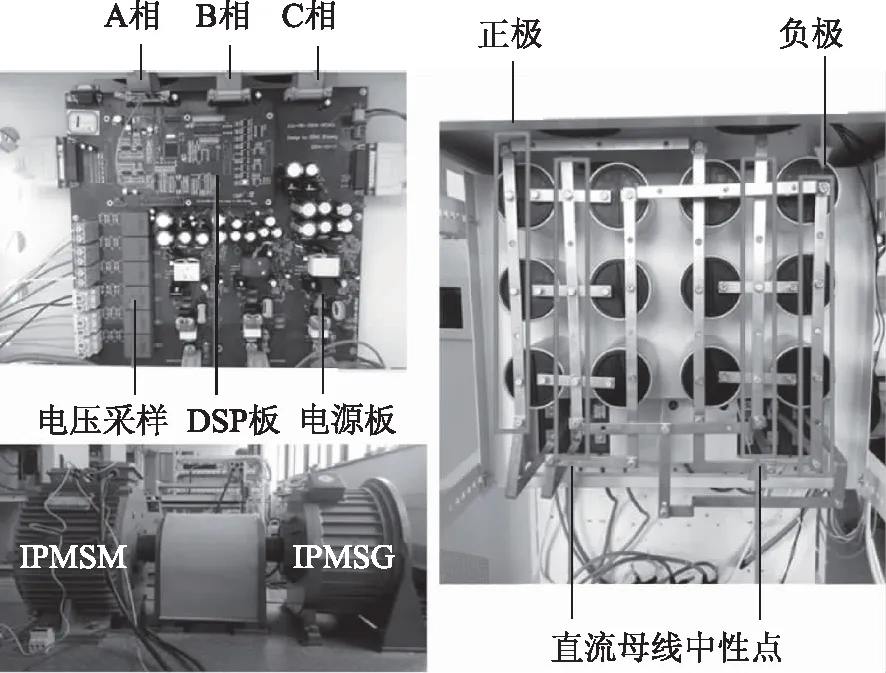
图11 三相四开关逆变器供电的IPMSM驱动系统平台Fig.11 The test platform for three-phase four-switch inverter fed IPMSM drive system
如图12所示,当IPMSM的转速n=30 r/min且给定转矩为-400 N·m时,直流母线中性点电压控制在2.5 s时投入,可见中性点电压中存在的20 V左右的直流偏置很快被消除,两电容电压uC1、uC2在中性点电压控制投入之后很快达到平衡状态。根据图12a计算所得的中性点电压Δu与定子电流isβ之间的相位关系如图12b所示,可以看出无论是在动态过程中还是稳态过程中,isβ始终与中性点电压Δu保持同相位。中性点电压控制环所用PI控制器的参数见表2。
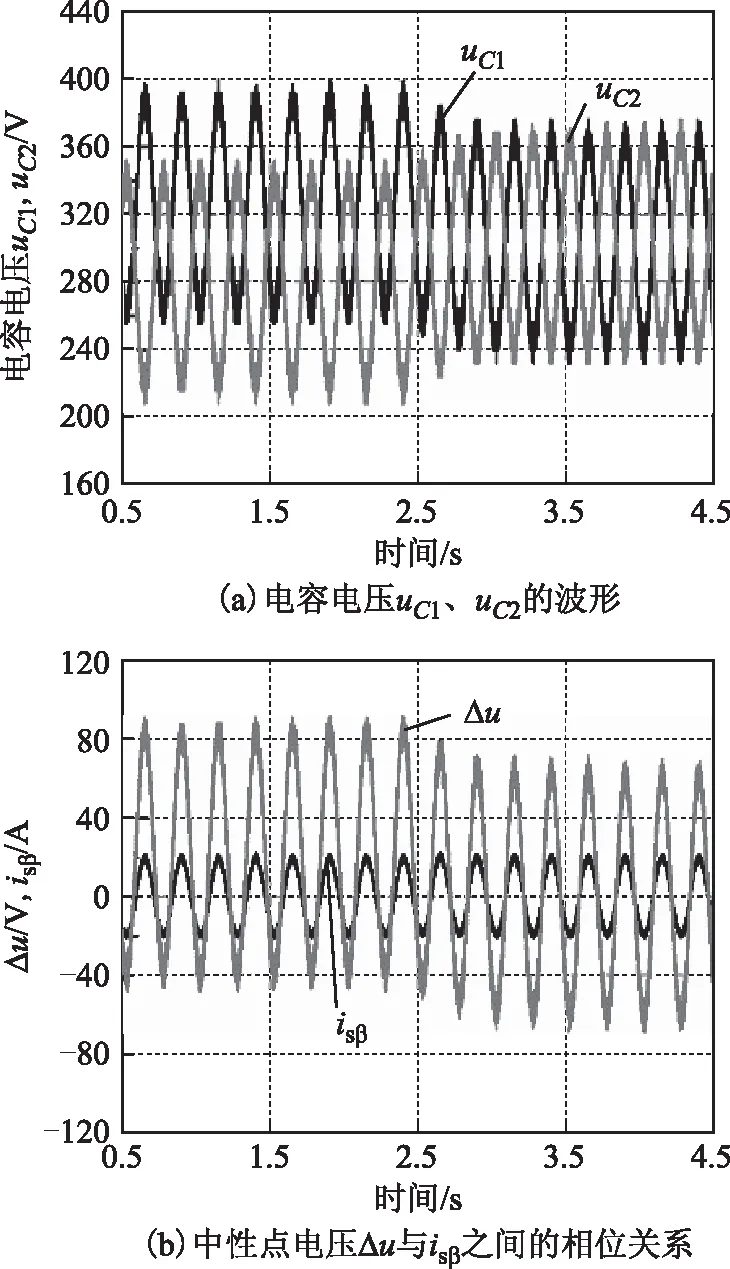
图12 直流母线中性点电压控制Fig.12 Experimental results for the neutral point voltage control of DC-link
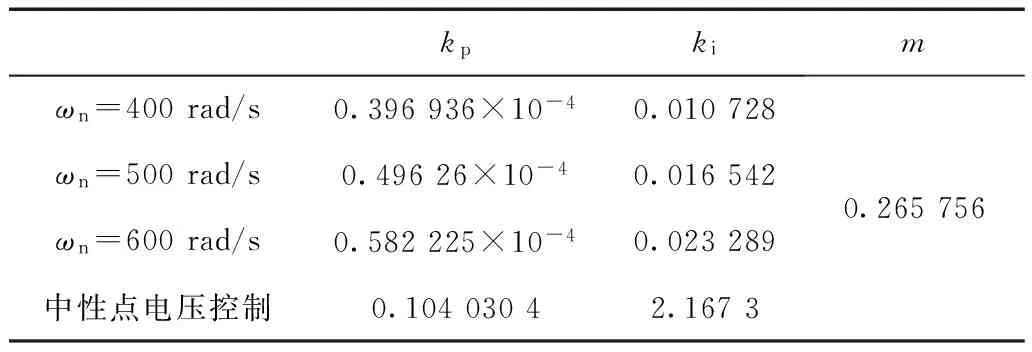
kpkimωn=400rad/s0.396936×10-40.010728ωn=500rad/s0.49626×10-40.016542ωn=600rad/s0.582225×10-40.023289中性点电压控制0.10403042.16730.265756
为检验本文所提的PI-SVM DTC模型的有效性,利用第2节所建的数学模型,经反复尝试,选择参数m的值为0.265 756。随后,设计转矩环PI控制器的参数,取转矩环的阻尼比ζ=0.707,分别选择三组不同的自然频率ωn值,其对应的kp、ki见表2。当IPMSM的转速n=30 r/min且给定转矩由-200 N·m跳变到-400 N·m时,相应的IPMSM转矩输出和三相电流输出如图13~图15所示。可以看出,在不同的ωn值下,也即采用不同的PI控制器参数时,基于三相四开关的IPMSM PI-SVM DTC均能正常运行。随着ωn值的增大,IPMSM输出的转矩纹波不断减小,中性点电压控制对转矩环的影响逐渐减轻。与此同时,IPMSM输出转矩的上升时间由ωn=400 rad/s时的约3.5 ms减小到ωn=600 rad/s时的约2 ms。因此,本文选择ωn=600 rad/s时的PI控制器参数作为PI-SVM DTC方案的运行参数。
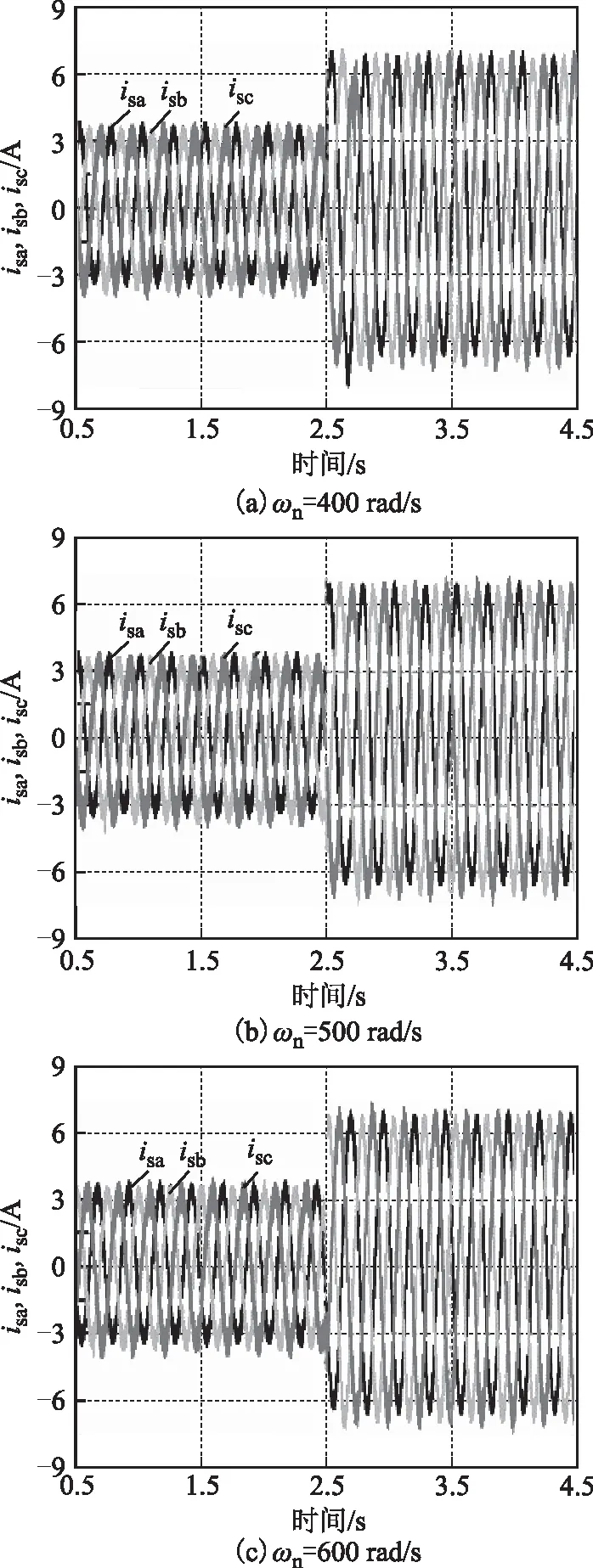
图13 当给定转矩由-200 N·m跳变到-400 N·m时IPMSM的三相电流输出Fig.13 Three-phase current outputs of IPMSM when the desired torque steps from -200 N·m to -400 N·m
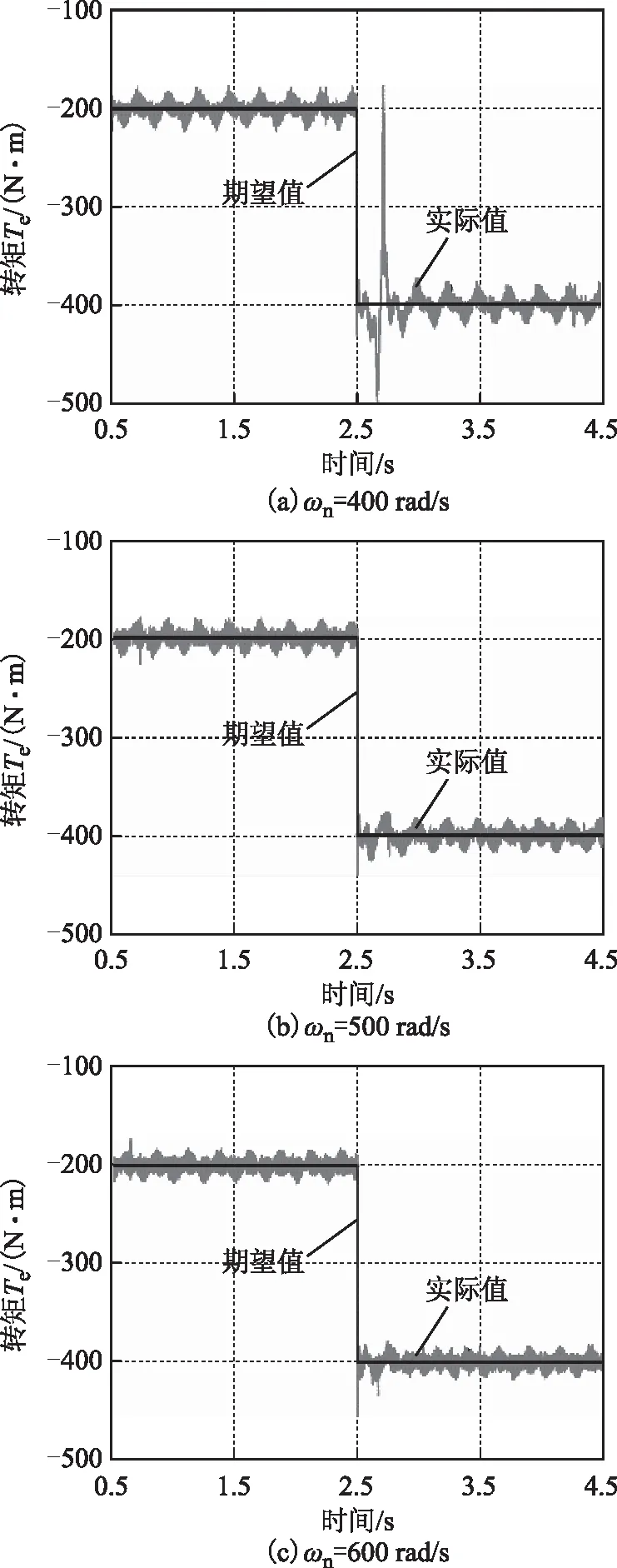
图14 当给定转矩由-200 N·m跳变到-400 N·m时IPMSM的转矩输出Fig.14 Torque output of IPMSM when the desired torque steps from -200 N·m to -400 N·m
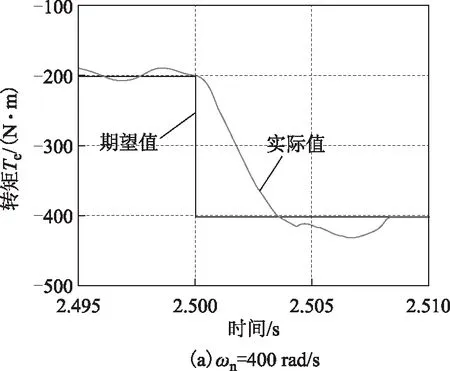
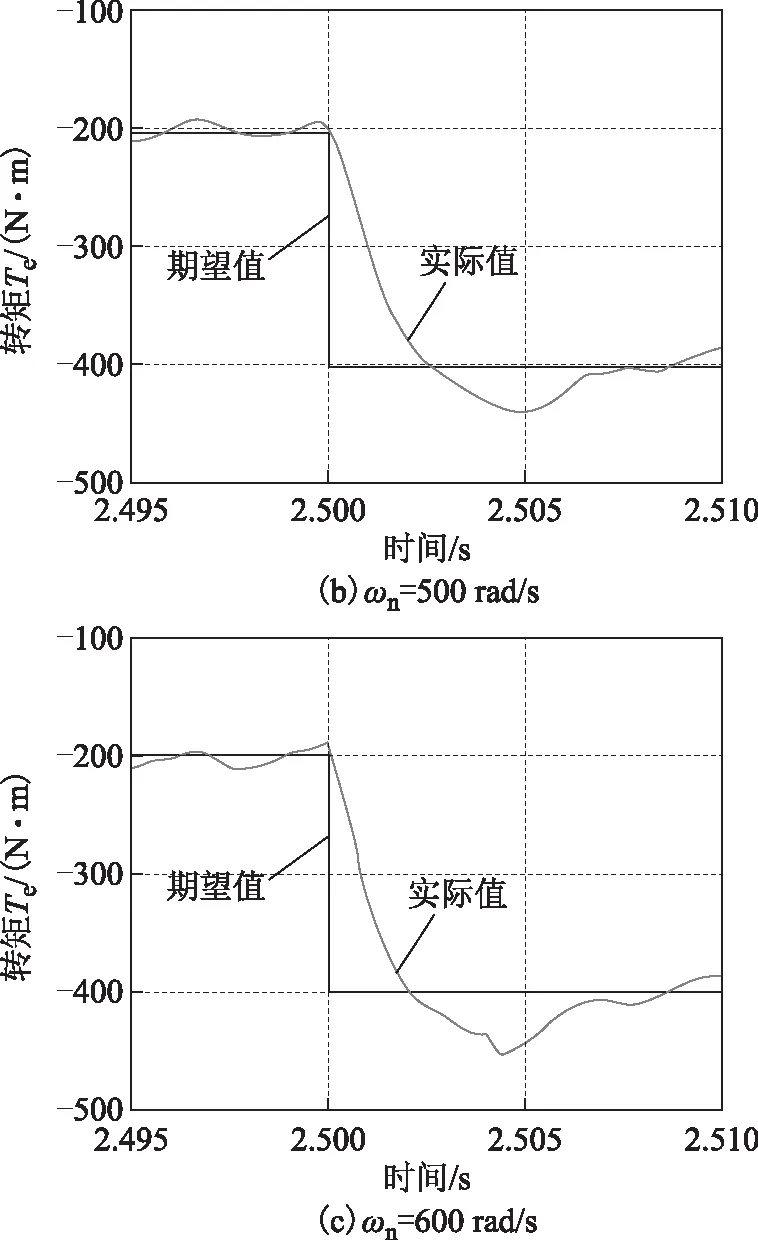
图15 当给定转矩由-200 N·m跳变到-400 N·m时IPMSM输出转矩的动态过程Fig.15 Dynamic response of the IPMSM torque output when the desired torque steps from -200 N·m to -400 N·m
当ωn=600 rad/s时,本文所采用的无差拍全阶状态观测器估算的定子磁链如图16a所示,其对应的定子磁链幅值如图16b所示。为抑制直流母线中性点电压中的直流偏置,定子磁链幅值中引入了低频波动。当转矩跳变时,定子磁链幅值中会出现尖峰毛刺。虽然如此,本文所搭建的无差拍全阶状态观测器还是能够提供具有足够精度的定子磁链估算值。当给定转矩从-200 N·m跳变到-400 N·m时,对应的直流母线电容电压uC1、uC2波形如图16c所示。可见,本文所提出的中性点电压控制方案具有较强的抗扰动能力。
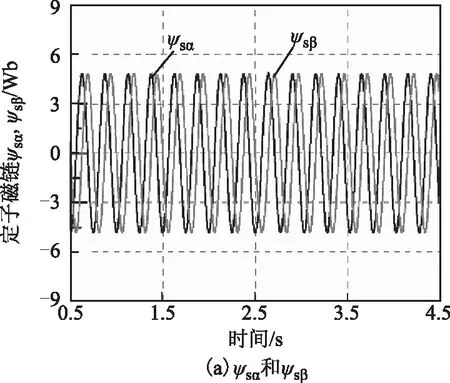
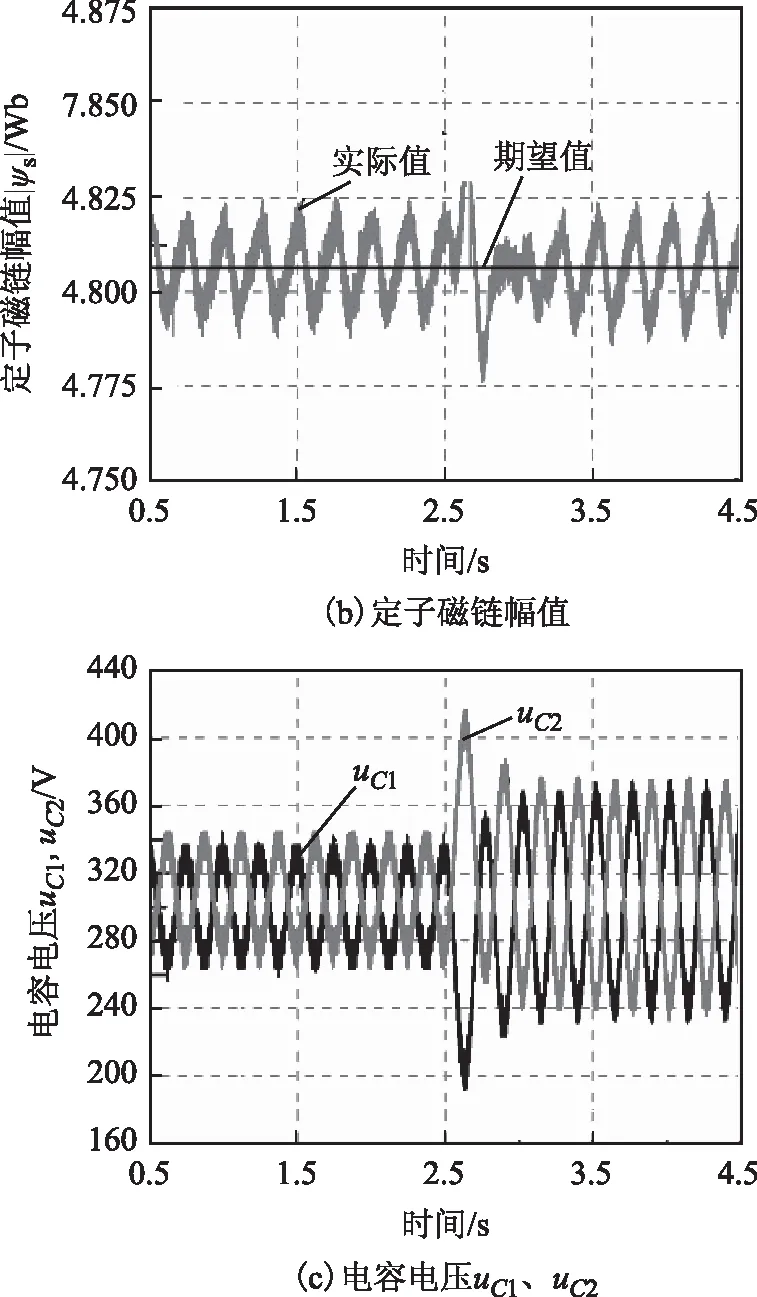
图16 当给定转矩由-200 N·m跳变到-400 N·m时定子磁链观测结果以及电容电压波形Fig.16 Estimated stator flux and voltage waveforms of capacitors C1 and C2 when desired torque steps from -200 N·m to -400 N·m
当ωn=600 rad/s,转速n=30 r/min,且给定转矩为-400 N·m时,IPMSM输出的稳态三相电流和转矩波形如图17所示,IPMSM的稳态转矩输出无静差,同时含有少量为抑制直流母线中性点电压偏移而产生的低次谐波。总的来说,由三相四开关逆变器驱动的IPMSM PI-SVM DTC策略具有较高的转矩响应速度和较低的转矩脉动。
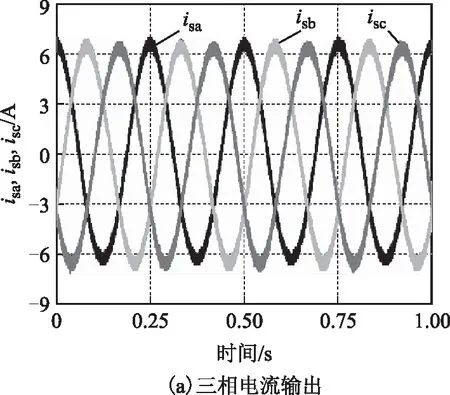
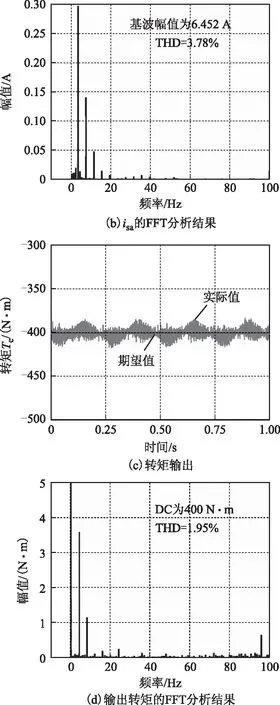
图17 当给定转矩为-400 N·m时,IPMSM输出的稳态三相电流和转矩波形Fig.17 Experimental results of three-phase current outputs and torque output for IPMSM when the desired torque is -400 N·m
5 结论
本文对由三相四开关逆变器驱动的凸极式永磁同步电机PI-SVM DTC策略进行了详细的建模与分析。利用IPMSM静止坐标系下的状态空间数学模型,建立了PI-SVM DTC策略中的定子磁链环模型,揭示了传统定子磁链环极点放置位置所存在的问题,提出了一种简单的极点位置调节方法,改善了定子磁链环的性能。随后,通过近似线性化处理,建立了PI-SVM DTC中转矩环的数学模型,为转矩环PI控制器的参数设计提供了依据。另外,为抑制三相四开关逆变器中直流母线中性点电压偏移,针对PI-SVM DTC策略,本文根据中性点电压的偏移量,在定子磁链环的给定定子磁链矢量中添加一定的补偿量,实现了对中性点电压的有效控制。实验结果验证了所提PI-SVM DTC模型的有效性,获得了一种适用于由三相四开关逆变器供电的IPMSM驱动系统的DTC方案。
[1] 夏长亮,张天一,周湛清,等.结合开关表的三电平逆变器永磁同步电机模型预测转矩控制[J].电工技术学报,2016,31(20):83-92. Xia Changliang,Zhang Tianyi,Zhou Zhanqing,et al.Model predictive torque control with switching table for neutral point clamped three-level inverter-fed permanent magnet synchronous motor[J].Transactions of China Electrotechnical Society,2016,31(20):83-92.
[2] 陈思溢,皮佑国.基于滑模观测器与滑模控制器的永磁同步电机无位置传感器控制[J].电工技术学报,2016,31(12):108-117. Chen Siyi,Pi Youguo.Position sensorless control for permanent magnet synchronous motor based on sliding mode observer and sliding mode controller[J].Transactions of China Electrotechnical Society,2016,31(12):108-117.
[3] 易伯瑜,康龙云,冯自成,等.基于扰动观测器的永磁同步电机预测电流控制[J].电工技术学报,2016,31(18):37-45. Yi Boyu,Kang Longyun,Feng Zicheng,et al.Predictive current control for permanent magnet synchronous motor based on disturbance observer[J].Transactions of China Electrotechnical Society,2016,31(18):37-45.
[4] 王文,罗安,黎燕.三相四开关并联有源电力滤波器的控制方法[J].电工技术学报,2014,29(10):183-190. Wang Wen,Luo An,Li Yan.Control method of three-phase four-switch shunt active power filter[J].Transactions of China Electrotechnical Society,2014,29(10):183-190.
[5] Freire N M A,Cardoso A J M.A fault-tolerant direct controlled PMSG drive for wind energy conversion systems[J].IEEE Transactions on Industrial Electronics,2014,61(2):821-834.
[6] 孙丹,何宗元,Ivonne Yznaga Blanco,等.四开关逆变器供电永磁同步电机直接转矩控制系统转矩脉动抑制[J].中国电机工程学报,2007,27(21):47-52. Sun Dan,He Zongyuan,Ivonne Yznaga Blanco,et al.Torque ripple reduction for a four-switch inverter fed PMSM DTC system[J].Proceedings of the CCSE,2007,27(21):47-52.
[7] 魏书荣,何之倬,符杨,等.海上风电机组故障容错运行研究现状分析[J].电力系统保护与控制,2016,44(9):145-154. Wei Shurong,He Zhizhuo,Fu Yang,et al.Research status and prospect of offshore wind turbine fault tolerance[J].Power System Protection and Control,2016,44(9):145-154.
[8] 樊英,张向阳,魏梦飒,等.开绕组永磁复合轮毂电机驱动系统容错控制[J].电工技术学报,2015,30(2):98-105. Fan Ying,Zhang Xiangyang,Wei Mengsa,et al.Fault-tolerant control for open-winding permanent magnet compact in-wheel motor drive system[J].Transactions of China Electrotechnical Society,2015,30(2):98-105.
[9] 侯世英,宋星,孙韬,等.基于空间矢量滞环控制的新型容错三相四开关并网逆变器[J].电力系统保护与控制,2011,39(21):138-144. Hou Shiying,Song Xing,Sun Tao,et al.A novel topology of fault-tolerant three-phase four-switch grid-connected inverter based on space vector hysteresis control[J].Power System Protection and Control,2011,39(21):138-144.
[10]杨建飞,胡育文.永磁同步电机直接转矩控制转矩调节器设计[J].中国电机工程学报,2011,31(9):76-81. Yang Jianfei,Hu Yuwen.Torque regulator design for direct torque control of permanent magnet synchronous motor[J].Proceedings of the CSEE,2011,31(9):76-81.
[11]Niu Feng,Li Kui,Wang Yao.Direct torque control for permanent magnet synchronous machines based on duty ratio modulation[J].IEEE Transactions on Industrial Electronics,2015,62(10):6160-6170.
[12]Azab M,Orille A L.Novel flux and torque control of induction motor drive using four switch three phase inverter[C]//The 27th Annual Conference of the IEEE Industrial Electronics Society,Denver,CO,2001:1268-1273.
[13]Ouarda A,Nouira I,Badsi B E,et al.DTC strategies dedicated to IM drives fed by reduced-structure inverters emulating the conventional one:application to low-cost automotive actuators[C]//2014 17th International Conference on Electrical Machines and Systems(ICEMS),Hangzhou,2014:169-174.
[14]El Badsi B,Bouzidi B,Masmoudi A.DTC scheme for a four-switch inverter-fed induction motor emulating the six-switch inverter operation[J].IEEE Transactions on Power Electronics,2013,28(7):3528-3538.
[15]Zhou Dehong,Zhao Jin,Liu Yang.Predictive torque control scheme for three-phase four-switch inverter-fed induction motor drives with dc-link voltages offset suppression[J].IEEE Transactions on Power Electro-nics,2015,30(6):3309-3318.
[16]徐海奇,何凤有,曹晓冬,等.三相四开关逆变器供电永磁同步电机预测转矩控制[J].电机与控制应用,2015,42(2):16-20. Xu Haiqi,He Fengyou,Cao Xiaodong,et al.Predictive torque control of a four-switch three phase inverter fed PMSM[J].Electric Machines & Control Application,2015,42(2):16-20.
[17]刘宏超,吕胜民,张春晖.三相四开关并联型有源电力滤波器的SVPWM调制算法[J].电工技术学报,2011,26(4):128-134. Liu Hongchao,Lü Shengmin,Zhang Chunhui.Space vector pulse width modulation of three-phase four-switch shunt active power filter[J].Transactions of China Electrotechnical Society,2011,26(4):128-134.
[18]谭兴国,王辉,张黎,等.具有电压补偿的四开关并网逆变器等效SVPWM控制方法[J].电力系统保护与控制,2014,42(1):1-8. Tan Xingguo,Wang Hui,Zhang Li,et al.An equivalent SVPWM control method with voltage compensation for four-switch inverter[J].Power System Protection and Control,2014,42(1):1-8.
[19]Zeng Zhiyong,Zheng Weiyi,Zhao Rongxiang,et al.Modeling,modulation,and control of the three-phase four-switch PWM rectifier under balanced voltage[J].IEEE Transactions on Power Electronics,2016,31(7):4892-4905.
[20]Tang Lixin,Zhong Limin,Rahman M F,et al.A novel direct torque controlled interior permanent magnet synchronous machine drive with low ripple in flux and torque and fixed switching frequency[J].IEEE Transactions on Power Electronics,2004,19(2):346-354.
[21]Inoue Y,Morimoto S,Sanada M.Examination and linearization of torque control system for direct torque controlled IPMSM[J].IEEE Transactions on Industry Applications,2010,46(1):159-166.
[22]Wang Rui,Zhao Jin,Liu Yang.A comprehensive investigation of four-switch three-phase voltage source inverter based on double Fourier integral analysis[J].IEEE Transactions on Power Electronics,2011,26(10):2774-2787.
[23]Hu Yuwen,Zhang Lanhong,Huang Wenxin,et al.A fault-tolerant induction generator system based on instantaneous torque control (ITC)[J].IEEE Transac-tions on Energy Conversion,2010,25(2): 412-421.
(编辑 于玲玲)
Modeling and Analysis of the Direct Torque Control System for IPMSM Fed by Three-Phase Four-Switch Inverter
YuanQingwei1ZhaoRongxiang1,2
(1.College of Electrical Engineering Zhejiang University Hangzhou 310027 China 2.National Engineering Research Center for Applied Power Electronics Hangzhou 310027 China)
The proportional-integral controller coupled with space vector modulation based direct torque control(PI-SVM DTC)scheme was introduced in this paper to the three-phase four-switch inverter fed interior permanent magnet synchronous motor(IPMSM)drive system to obtain a higher torque dynamic response and a lower torque ripple output.Considering the strong coupling of IPMSM and the convenience of analyzing the stator flux control loop,the state-space model for IPMSM in static coordinate was established,which chose the stator flux as the state variables.To improve the steady-state performance,a deadbeat full-order state observer was built to realize a closed-loop estimation of stator flux.The problems caused by the conventional pole placement of the stator flux control loop were revealed,and a simple method was proposed to optimize the pole positions of the stator flux loop.Then,the model of the torque control loop was also created.Additionally,to inhibit the deviation of the neutral point voltage of DC-link,a compensation was produced according to the deviation,and added into the stator flux control loop.Experimental results have validated the effectiveness of the proposed model for PI-SVM DTC.
Interior permanent magnet synchronous motor(IPMSM),three-phase four-switch inverter,direct torque control(DTC),state-space model,neutral point voltage deviation
2016-08-08 改稿日期2016-12-15
10.19595/j.cnki.1000-6753.tces.L70098
TM351
袁庆伟 男,1988年生,博士,研究方向为永磁电机直接转矩控制、三相四开关逆变器。
E-mail:yqw65111762@sina.com
赵荣祥 男,1962年生,教授,博士生导师,研究方向为交流调速系统、智能电网等。
E-mail:rongxiang@zju.edu.cn(通信作者)
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
山东工业技术(2016年15期)2016-12-01 05:31:19
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电力建设(2014年8期)2014-04-16 05:59:09
电测与仪表(2014年21期)2014-04-04 12:32:08
电测与仪表(2014年23期)2014-04-04 12:08:30
电测与仪表(2014年11期)2014-04-04 09:21:36