一种基于灰预测理论的混合蛙跳算法
2017-08-31 19:02:23袁中华王景芹
电工技术学报 2017年15期
杜 江 袁中华 王景芹
(河北工业大学电磁场与电器可靠性省部共建重点实验室 天津 300130)
一种基于灰预测理论的混合蛙跳算法
杜 江 袁中华 王景芹
(河北工业大学电磁场与电器可靠性省部共建重点实验室 天津 300130)
为提高混合蛙跳算法在优化问题求解中的性能,提出一种基于灰预测理论的改进混合蛙跳算法。该算法首先将基本算法的进化模式进行调整,强化了进化过程中全局信息的交换;之后引入移动步长变异算子,根据进化过程的不同阶段和利用灰预测理论获得进化过程中最优解进步速度,并借鉴模糊控制思想对该变异算子进行控制,进而实现移动步长的自适应调整。采用6个标准测试函数,与基本算法和已有改进算法进行性能对比分析,证明了改进后的混合蛙跳算法在收敛精度、收敛速度和收敛成功率方面的优越性及灰预测理论在算法改进领域中的可行性。最后,将改进算法应用于10 kV油浸式配电变压器优化设计工作中,验证了该改进算法的实用性。
混合蛙跳算法 灰预测 变异算子 优化设计
0 引言
近年来,应优化问题之需求,各种智能仿生算法相继被提出,如遗传算法、粒子群算法、混合蛙跳算法(Shuffled Frog Leaping Algorithm,SFLA)等。其中,混合蛙跳算法于2003年由M.M.Eusuff等[1]提出,该算法是结合了模因算法和粒子群优化算法的一种全新智能仿生算法,具有结构简单、设置参数数量较少、鲁棒性强等优点,一经提出便在计算机领域和许多工程领域得到了广泛的应用[2-6]。
然而,混合蛙跳算法也存在易陷入局部最优、收敛精度不高和收敛成功率低等不足。为了提高该算法的整体性能,国内外学者进行了大量的研究与改进。文献[7]将变异算子引入算法,加强了青蛙种群的多样性,增加了解空间的搜索范围,降低了算法早熟的可能性。文献[8]把加速因子的概念引入子种群内部迭代中,提高了算法整体寻优能力。文献[9]将差分进化机制有机地嵌入进化过程中,改善了种群的多样性,进而提高了算法在复杂优化问题中的寻优能力。
本文针对基本混合蛙跳算法的不足,将算法的运行模式予以调整,并引入移动步长变异算子和灰预测理论,进而构建一种基于灰预测理论的新模式混合蛙跳算法(New Model for Shuffled Frog Leaping Algorithm,PMSFLA)。仿真结果表明,改进后的算法在收敛精度、收敛速度、收敛成功率以及实用性方面都具有较好的效果,算法的综合性能得到了有效提升。
1 基本混合蛙跳算法
基本混合蛙跳算法是一种全局寻优的启发式智能仿生算法,其寻优过程是模拟自然界中青蛙扑食现象。该算法每次进化过程可分为两大机制:种群混合排序机制和子种群内部寻优机制。种群混合排序机制,即种群中青蛙个体按照适应度进行排序、重新划分子种群。子种群内部寻优机制,即子种群内部进化。
设蛙群由F个分布在D维解空间的青蛙个体组成,每个子种群中参与进化青蛙个体的属性均含有两个D维矢量:Xi=(xi1,xi2,…,xiD)和Di=(di1,di2,…,diD),其中,1≤i≤m,-Dimax≤Di≤Dimax,Dimax为最大移动步长。进化式为
Di=rand( )×(Xi-Xw)
(1)
Xw(new)=Xw(old)+Di
(2)
Xw(new)=Xw(old)+rand( )×Dimax
(3)
式中,Di为移动步长;rand()表示取(0,1)区间的随机数;Xw(old)、Xw(new)分别为进化前、后的青蛙个体位置。当式(2)为局部深度搜索时,Xi为子种群最优个体位置Xb;当式(2)为全局深度搜索时,Xi为整个种群最优个体位置Xg,式(3)为随机移动公式。
算法根据适应度判断其位置的优劣,每次进化均是由子种群的最差个体参与,且每次进化选择进行局部深度搜索、全局深度搜索和随机移动三种操作中的一种。
2 改进的混合蛙跳算法
2.1 算法模式的调整
基本混合蛙跳算法中,青蛙种群按照适应度排序、划分子种群之后,每个子种群各自进行内部进化,直到达到内部进化次数或满足其他结束条件。之后,判断是否满足整个算法的结束条件,如果满足则结束,否则再次进行排序、划分子种群、子种群内部进化,直到满足整个算法的结束条件。此进化过程的不足之处是:子种群内部的多次进化中,由于子种群进化间不平衡性的存在,不能保证每次进化均是以种群适应度最优的前m个个体为进化目标。
鉴于基本混合蛙跳算法的上述问题,本文对基本算法的进化模式予以调整:将基本混合蛙跳算法中的种群混合排序(划分子种群)机制与子种群内部进化机制进行合并处理,即子种群内部每进行一次进化就进行一次种群混合排序(划分子种群)。这种每次进化前都进行混合排序(划分子种群)操作的运行模式打破了子种群对青蛙个体进化的限制,提高了局部深度搜索中进化目标的质量,即保证了子种群每次局部深度搜索的进化目标都是全种群最优秀的m个个体之一。如此调整之后构成的新模式混合蛙跳算法,加强了算法全局信息的交换,简化了算法的进化模式,对算法跳出局部极值点、提高进化效率有很大帮助。
2.2 自适应步长思想的引入
在算法进化过程中,采用合适的移动步长,可同时兼顾算法的收敛速度和收敛精度。所以,本文引入移动步长变异算子,自适应调整移动步长的大小。
2.2.1 变异算子的引入
遗传算法是一种经典的现代优化算法,广泛应用于工程领域中[10,11]。本文效仿遗传算法,添加变异操作机制,自适应地改变移动步长(移动速度)的大小,是一种非常有效的提高求解性能的方法。本文在种群进化的移动步长中,引入变异算子将式(1)改进为[7]
Di=rand( )×bi(Xi-Xw)
(4)
式中,bi为移动步长的变异算子。
由式(4)可看出,变异算子的大小直接影响移动步长的大小,进而影响蛙群对解空间的搜索范围。显然,bi取值较大时的移动步长较大,所搜索的解空间范围就较大;反之,搜索空间较小。当算法处于进化前期,较大的移动步长可以提高算法收敛速度,使蛙群迅速聚集在最优解附近;当算法处于进化后期,较小的移动步长可以减缓粒子在最优解附近的往复振荡,使算法更精确地收敛于最优解。另外,当算法具有较快的进步速度时,较小的移动步长可较大可能地避免粒子跳过解空间内较优的位置;当算法的进步速度较慢时,说明算法很有可能陷入局部最优,此时较大的移动步长有助于算法跳出局部最优。
通过上述分析,本文最终确定了移动步长的变异算子bi的控制量:“算法进化阶段”和“算法进步速度”。即这两个控制量共同决定bi的取值。
2.2.2 灰预测控制器设计
灰预测控制器设计如图1所示,其中S和V为变异系数控制器的输入量,分别表示“算法进化阶段”和“算法进步速度”两个控制量的测量值。由这两个控制量的测量值,通过控制规则共同决定变异算子bi的取值。

图1 灰预测控制器设计Fig.1 Grey prediction controller design

2)算法进步速度测量值V。设Yg1、Yg2分别表示相邻两次进化种群最优适应度,用它们的差值Yg2-Yg1表示算法当前的进步速度。设vmark_min、vmark_max分别表示算法进步速度的阈值,当Yg2-Yg1∈(-∞,vmark_min]时,则认为算法进步速度较小,说明很可能收敛于局部最优解附近,此时应使bi取一较大值,这样有助于算法跳出局部最优解;当Yg2-Yg1∈[vmark_max,+∞)时,则认为算法进步速度较大,此时应使bi取一较小值,避免移动步长太大而漏掉解空间内较好的解;当Yg2-Yg1∈(vmark_min,max),即进步速度适中时,bi取一适中值。
传统方法是得到Yg1之后,再进行一次算法进化得到Yg2,进而作差由Yg2-Yg1判断算法的进步速度。然而这种获取算法进步速度的方法具有明显的滞后性:若进步速度显示需要调整bi,则相当于为了调整bi进行了一次质量很差的进化。针对此问题,本文获取进步速度的方式不是进行下一次的实际进化,而是根据已有数据对下一次进化结果进行预测,根据预测结果求得当前进步速度,进而调整变异算子bi的取值。这种“防患于未然”的控制思想,大大减少了徒劳的进化代数,对减小算法运行的盲目性、提高运行效率具有显著效果。
灰预测理论[12]是灰理论的一部分,具有所需原始数据少、环境适应性强、预测精度高等优点且计算量较小,因此本文采用灰预测理论对下一次进化结果进行预测。
结合变异算子的控制特点,对灰预测过程阐述如下。
(1)设置原始序列:x=(x(1),x(2),…,x(p)),其中p≥4,x(1),x(2),…,x(p)是最近的连续p次进化的种群最优适应度。x(1),x(2),…,x(p)是一组递增的序列。
(2)级比平滑检验:利用式(5)进行级比平滑检验。
(5)

(3)白化型GM(1,1)建模。
①利用式(6)进行AGO处理。
x(1)(q)=x(1)(q-1)+x(q) 1≤q≤p
(6)
且当q=1时,x(1)(1)=x(1)。
②利用式(7)进行MEAN处理。
z(1)(q)=0.5x(1)(q)+0.5x(1)(q-1) 2≤q≤p
(7)
③利用式(8)和式(9)求得发展系数a和灰作用量b。
(8)
(9)
④利用式(10)和式(11)求得GM(1,1)白化响应式。
(10)
(11)

(4)残差检验:利用式(10)~式(12)求得残差序列e(1),e(1),…,e(p),进而利用式(13)求得精度p。。
(12)
(13)
式中,e(1)=0。若p。<90%,说明原始数列的波动性较大,即算法具有较快的进步速度,则给变异算子bi赋一较小值,灰预测过程到此结束;否则说明此方法具有较高的预测精度,进而继续步骤(5)。
(5)利用式(14)预测下一次迭代后的最优适应度。
(14)
如果Yg_per-Yg较小,说明算法进步速度较慢,则给变异算子bi赋一较大值;否则给变异系数bi赋一较小值。
3)当这两个控制量的“意见”出现分歧时,应综合考虑其对算法的影响,决定给变异算子bi赋以较大值bib、适中值bim还是较小值bil。综上分析,并借助模糊控制的思想,得到变异算子控制规则见表1。
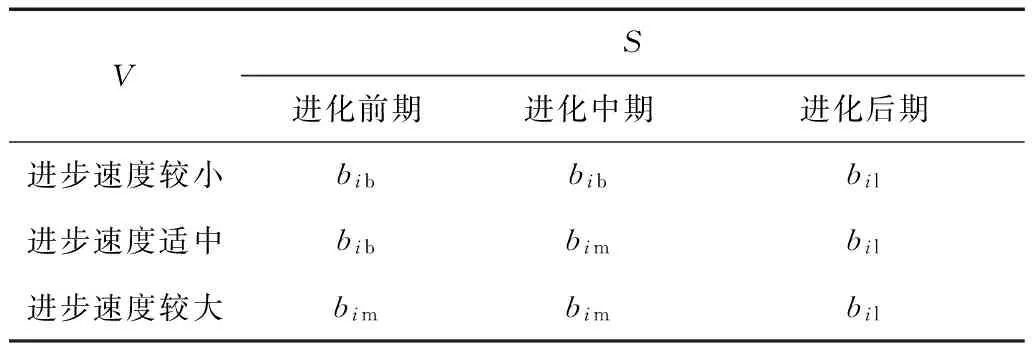
表1 控制规则Tab.1 Control rules table
2.3 改进后算法流程
将基本混合蛙跳算法改进后,得到一种基于灰预测理论的新模式混合蛙跳算法,算法流程如下:
1)对算法参数及蛙群进行初始化。
2)计算每只青蛙个体的适应度Yi。
3)对该蛙群按适应度从优到差进行降优排序。
4)将该青蛙种群分为m个青蛙子种群,具体划分子种群方法描述如下:蛙群按适应度从优到差排序,第1只青蛙分给第1子种群,第2只青蛙分给第2子种群,…,第m只青蛙分给第m子种群,第m+1只青蛙分给第1子种群,第m+2只青蛙分给第2子种群,…,第F只青蛙分给第m子种群。
5)找出每个子种群中适应度最优的青蛙位置Xb和适应度最差的青蛙位置Xw。
6)对每个子种群中适应度最差的青蛙进行更新处理。对其执行的操作进行选择,包括局部深度搜索、全局深度搜索和随机移动。各操作描述如下:①首先试探局部深度搜索,利用式(2)和式(4)使子种群适应度最差个体向子种群适应度最优个体方向前进一步,如果Xw(new)的适应度优于Xw(old)的适应度,则确定执行局部深度搜索并跳转至步骤7,否则抛弃局部深度搜索;②试探全局深度搜索:利用式(2)和式(4)使子种群适应度最差个体向种群适应度最优个体方向前进一步,如果Xw(new)的适应度优于Xw(old)的适应度,则确定执行全局深度搜索并跳转至步骤7,否则抛弃全局深度搜索;③利用式(3)执行随机移动。
7)计算更新后每只青蛙的适应度Yi,并找出种群最优适应度Yg及其位置Xg。
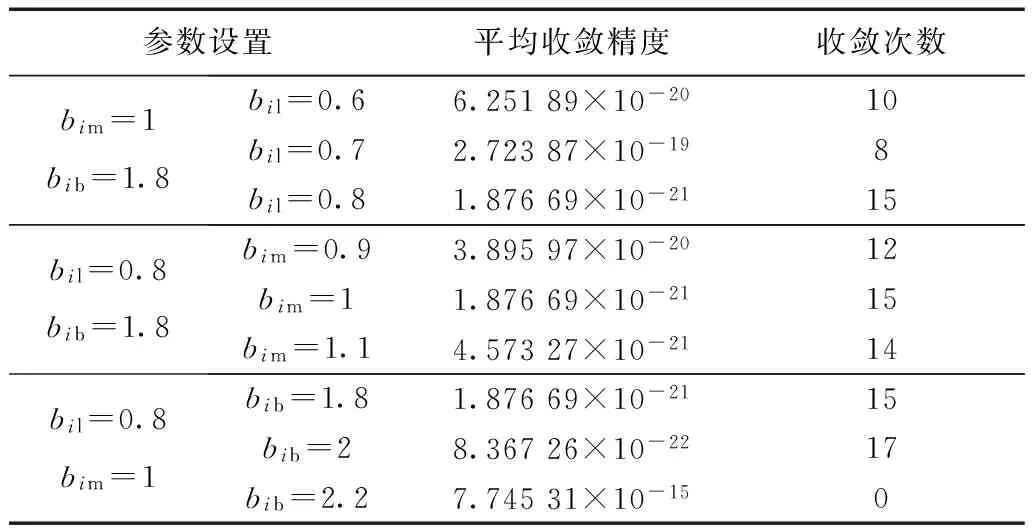
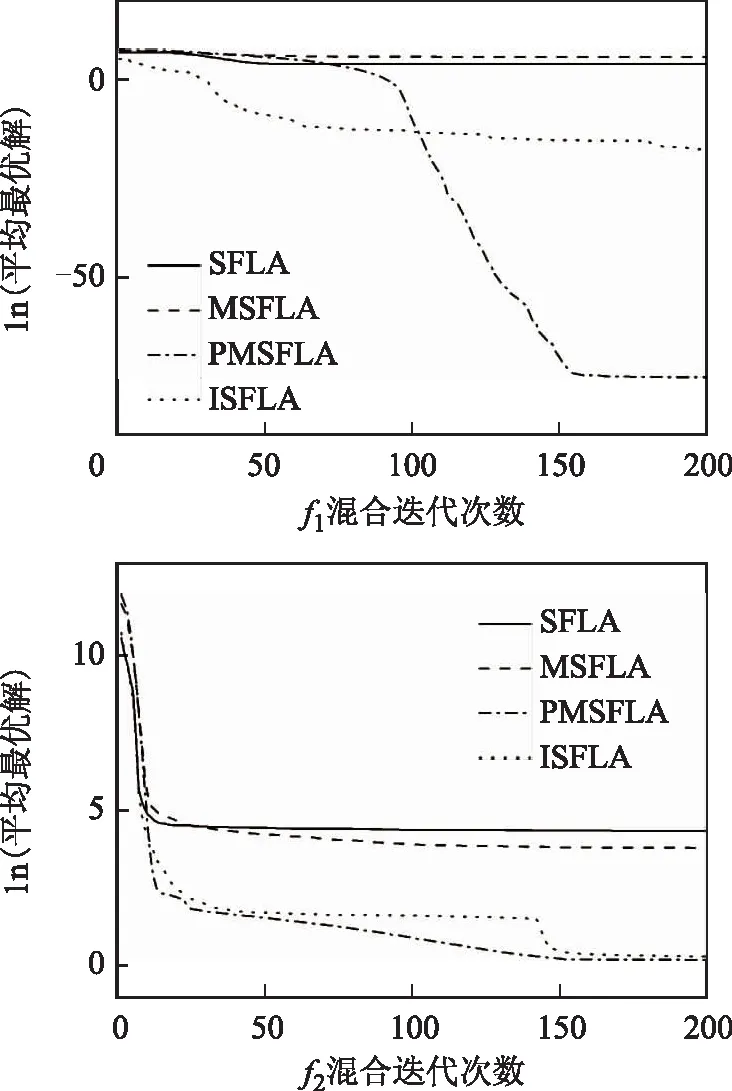
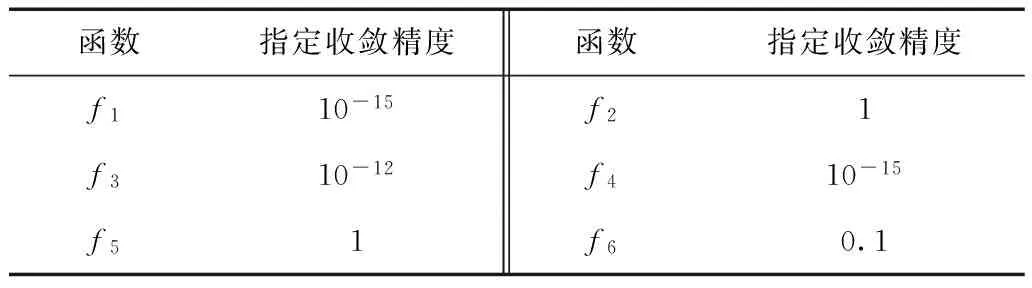
8)如果算法当前进化代数i 9)判断是否满足结束条件,即判断是否达到最大混合迭代次数N1或满足最小允许误差Δ。如果不满足结束条件,则执行步骤3;否则输出优化结果并结束。 3.1 变异参数的确定 通过前文的分析可知,变异参数bil、bim、bib的不同取值对PMSFLA的综合性能有较大影响。若bil、bim、bib的取值分别在0.6~0.8、0.9~1.1、1.8~2.2之间,则PMSFLA的性能较好。本文通过实验法确定能够使PMSFLA展现出优秀性能的变异参数的最佳组合。表2给出了不同变异参数组合下算法PMSFLA对测试函数Schwefel的仿真结果,函数信息见表3。其中,PMSFLA的青蛙个体数F=48,子种群数m=8,最大移动步长Djmax=0.3,最大混合迭代次数N1=100,子种群内部迭代次数N2=20,各控制参数pmark_min=0.5、pmark_max=0.75、vmark_min=0.05、vmark_max=0.5。表2中平均收敛精度为PMSFLA在10维度解空间内运行20次的平均收敛精度;收敛次数为算法PMSFLA在10维度解空间内运行20次中收敛精度达到10-20的次数,每次运行的最大混合迭代次数为100次。 表2 Schwefel函数测试结果Tab.2 The test results of Schwefel function 由表2可看出,变异参数bib=2、bim=1、bil=0.8的组合可认为是使PMSFLA展现非常优异的综合性能的最佳组合,因此,下文的仿真也将采用该参数组合。 3.2 实验设计 为了检验本文改进基本混合蛙跳算法思路的可行性,将MSFLA和PMSFLA与基本SFLA和葛等宇[7]提出的改进算法(ImprovedShuffledFrogLeapingAlgorithm,ISFLA)做对比实验。实验选择6个典型的测试函数进行性能测试[13],该6个测试函数的名称、表达式等信息见表3。 实验的硬件环境为:WindowsXP系统,AMD双核2.5GHzCPU,1.94G内存。通过VC++软件编写程序进行仿真实验。算法MSFLA、PMSFLA、SFLA和ISFLA的参数设置如下:青蛙个体数F=48,子种群数m=8,最大移动步长Djmax=0.3,最大混合迭代次数N1=200,子种群内部迭代次数N2=20,各控制参数pmark_min=0.5、pmark_max=0.75、vmark_min=0.05、vmark_max=0.5、bib=2、bim=1、bil=0.8。本文实验从四个方面进行验证。 表3 测试函数信息Tab.3 Test function information 1)固定算法进化代数,根据多次实验的平均最优解比较四种算法的求解精度。 2)固定算法进化代数,通过记录多次实验的运行时间比较四种算法求解的计算量。 3)通过多次实验的平均进化曲线比较四种算法的收敛速度。 4)固定收敛精度,结合进化代数比较四种算法收敛的成功率。 3.3 实验结果及分析 3.3.1 算法求解精度对比 每种算法对每个测试函数在不同维度下均进行20次实验,表4给出了该20次实验的平均最优解。 由表4可看出,相对于SFLA,MSFLA在大多数优化问题下都具有更高的求解精度;相对于另外两种算法,PMSFLA在不同优化问题下的求解精度均优于其他三种算法。另外,PMSFLA与MSFLA的对比,体现了自适应移动步长思想在求解精度方面的贡献。此外由表4还可看出,由于不同测试函数在解空间内的分布特性各异,PMSFLA对不同测试函数在其收敛精度方面的提高有着相对明显的差异,对函数f2和函数f6收敛精度的提高比较有限。 表4 各函数在不同算法不同维度下的平均最优解Tab.4 The average optimum solution of each function in the different algorithms under the different dimensions 3.3.2 算法求解计算量对比 设定解空间维度D=10。每种算法对每个测试函数进行20次实验,每次实验进行200次混合迭代,记录该20次实验的总计算时间之和,见表5。 表5 各函数在不同算法下的运行时间Tab.5 The runtime of each function in the different algorithms 表5中,SFLA与MSFLA的运行时间对比显示了对算法进化模式的调整,使算法进行混合迭代时计算量的增加;MSFLA与PMSFLA的运行时间对比显示了对算法移动步长的调整,使算法进行混合迭代时计算量的增加。总体来讲,MSFLA和PMSFLA的运行时间略长于SFLA,而与ISFLA的运行时间基本相当,说明MSFLA和PMSFLA在计算复杂度方面的增加非常有限。 3.3.3 算法收敛速度对比 设定解空间维度D=10。每种算法对每个测试函数进行20次实验,得到200次混合迭代中每一代的平均最优解数据,绘制收敛曲线,如图2所示。同时为了较直观地展示各算法的进化趋势,对其进化数据取自然对数。图2中函数f3的收敛曲线中SFLA与MSFLA两条曲线几乎重合。 图2 各测试函数收敛曲线Fig.2 Evolution curves of each test function 由图2可知,MSFLA在大多数优化问题下的收敛速度都优于SFLA;PMSFLA在函数f1下的收敛速度与SFLA和MSFLA相仿、比ISFLA较差,在其他函数下的收敛速度均优于其他三种算法。另外,图2中PMSFLA与MSFLA的收敛曲线对比,说明合理地移动步长能够更快地寻得更优解。 3.3.4 算法收敛成功率对比 设定各测试函数的收敛精度见表6,解空间维度D=10。每种算法对每个测试函数进行50次实验,混合迭代次数达到200次时仍未达到指定收敛精度,则认为此次实验没有收敛。记录收敛时算法进行混合迭代的次数、收敛成功次数,并计算收敛成功率见表7,其中,收敛成功率=收敛成功次数/50。 表6 各测试函数收敛精度Tab.6 The convergence precision of each test function 表7 各测试函数收敛成功率Tab.7 Success rate of convergence of each test function 由表7可知,对于以上6个测试函数,相对于SFLA,MSFLA在部分优化问题下的收敛成功率有所提高;PMSFLA的收敛成功率均高于其他三种算法。 综上分析,本文提出的PMSFLA在收敛精度、收敛速度和收敛成功率方面都得到了满意的效果,体现了PMSFLA的优越性。 近年来,越来越多的智能优化算法被用于解决电力系统领域的优化问题[14-17]。为了检验本文提出的PMSFLA的实用性,将该改进算法应用于10 kV级容量为200 kV·A 的油浸式配电变压器优化设计中,并将其优化结果与穷举法和某厂家人工设计结果作对比。 实验的硬件环境为:Windows XP系统,AMD双核2.5 GHz CPU,1.94 G内存。PMSFLA参数设置:青蛙种群中青蛙个体数F=20,子种群数m=5,每个子种群内青蛙个体数n=4,最大移动步长Djmax=0.3,算法进化代数N1=20,子种群内部搜索次数N2=8,pmark_min=0.5,pmark_max=0.75,vmark_min=0.05,vmark_max=0.5,bib=2,bim=1,bil=0.8。 表8为不同优化方式下以变压器总成本为目标函数,以铁心直径、低压线圈匝数、低压导线规格和高压导线规格为变量的优化结果。其中,变压器总成本=制造成本+10年运行成本。从目标函数上看,PMSFLA的优化结果比人工设计结果节省1.21%的总成本,比穷举法获得的优化结果总成本只高0.12%。而从计算时间上看,穷举法耗时38.35 min,而PMSFLA耗时为3.45 min,耗费时间比为11.12倍。综上所述,PMSFLA进行变压器优化设计具有很大的优势,PMSFLA具有很强的工程实用性。 表8 10 kV油浸式配电变压器优化结果Tab.8 Optimization results of 10 kV oil-immersed distribution transformer 本文对基本SFLA进行改进:调整算法的运行模式,将基本混合蛙跳算法中的种群混合排序(划分子种群)机制与子种群内部进化机制进行合并处理;引入移动步长变异算子,并采用灰预测方式获取最优解进步速度,实现了移动步长的动态调整。仿真实验结果表明:本文提出的改进混合蛙跳算法有效提高了算法的求解精度、收敛速度和收敛成功率,增强了算法的寻优性能。本文采用的预测思想不仅适用于改进混合蛙跳算法,也可应用于其他优化算法的改进工作。最后通过将本文提出的PMSFLA应用于10 kV油浸式配电变压器优化设计工作中,证明了该改进算法的实用性和优越性。 [1] Eusuff M M,Lansey K E.Optimization of water distribution network design using the shuffled frog leaping algorithm[J].Water Resour Plan Manage,2003,129(3):210-225. [2] 代永强,王联国,施秋红,等.改进的混合蛙跳算法性能分析及其在电力系统经济调度中的应用[J].电力系统保护与控制,2012,40(10):77-83. Dai Yongqiang,Wang Lianguo,Shi Qiuhong,et al.Performance analysis of improved SFLA and the application in economic dispatch of power system[J].Power System Protection and Control,2012,40(10):77-83. [3] 耿超,王丰华,苏磊,等.基于人工鱼群与蛙跳混合算法的变压器Jiles-Atherton模型参数辨识[J].中国电机工程学报,2015,35(18):4799-4807. Geng Chao,Wang Fenghua,Su Lei,et al.Parameter identification of Jiles-Atherton model for transformer based on hybrid artificial fish swarm and shuffled frog leaping algorithm[J].Proceedings of the CSEE,2015,35(18):4799-4807. [4] 王茜,张粒子,舒隽,等.基于阈值选择策略的改进混合蛙跳算法在电网规划中的应用[J].电力系统保护与控制,2011,39(3):34-39. Wang Qian,Zhang Lizi,Shu Jun,et al.Application of improved shuffled frog leaping algorithm based on threshold selection strategy in transmission network planning[J].Power System Protection and Control,2011,39(3):34-39. [5] 张沈习,陈楷,龙禹,等.基于混合蛙跳算法的分布式风电源规划[J].电力系统自动化,2013,37(13):76-82. Zhang Shenxi,Chen Kai,Long Yu,et al.Distributed wind power planning based on hybrid leapfrog algorithm[J].Automation of Electric Power Systems,2013,37(13):76-82. [6] 王介生,高宪文.基于改进蛙跳算法的电渣重熔过程多变量PID控制器设计[J].控制与决策,2011,26(11):1731-1734. Wang Jiesheng,Gao Xianwen.Design of multivariable PID controller of electroslag remelting process based on improved shuffled frog leaping algorithm[J].Control and Decision,2011,26(11):1731-1734. [7] 葛宇,王学平,梁静.改进的混合蛙跳算法[J].计算机应用,2012,32(1):234-237. Ge Yu,Wang Xueping,Liang Jing.Improved shuffled frog leaping algorithm[J].Journal of Computer Applications,2012,32(1):234-237. [8] Elbeltagi E,Hegazy T,Grierson D.A modified shuffled frog-leaping optimization algorithm application to project management[J].Structure and Infrastructure Engineering,2007,3(1):53-60. [9] 赵鹏军,邵泽军.一种新的改进的混合蛙跳算法[J].计算机工程与应用,2012,48(8):48-50. Zhao Pengjun,Shao Zejun.Novel improved shuffled frog leaping algorithm[J].Computer Engineering and Applications,2012,48(8):48-50. [10]肖曦,许青松,王雅婷,等.基于遗传算法的内埋式永磁同步电机参数辨识方法[J].电工技术学报,2014,29(3):21-26. Xiao Xi,Xu Qingsong,Wang Yating,et al.Parameter identification of interior permanent magnet synchronous motors based on genetic algorithm[J].Transactions of China Electrotechnical Society,2014,29(3):21-26. [11]邓军,郝艳捧,李立浧,等.复杂导线垂直断面地势下直流线路无线电干扰计算的信赖域正则化遗传算法[J].电工技术学报,2014,29(10):304-311. Deng Jun,Hao Yanpeng,Li Licheng,et al.Trust region regularization genetic algorithm for radio interference of DC transmission lines passing through complex vertical section terrains of conductors[J].Transactions of China Electrotechnical Society,2014,29(10):304-311. [12]邓聚龙.灰预测与灰决策[M].武汉:华中科技大学出版社,2002. [13]陶新民,刘福荣,刘玉,等.定向多尺度变异克隆选择优化算法[J].控制与决策,2011,26(2):175-181. Tao Xinmin,Liu Furong,Liu Yu,et al.Clone selection optimization algorithm with directional multi-scale mutation[J].Control and Decision,2011,26(11):175-181. [14]刘华臣,王锡淮,肖健梅,等.基于群搜索算法的电力系统无功优化[J].电力系统保护与控制,2014,42(14):93-99. Liu Huachen,Wang Xihuai,Xiao Jianmei,et al.Reactive power optimization based on group search optimizer[J].Power System Protection and Control,2014,42(14):93-99. [15]周超,田立军.基于粒子群优化算法的电压暂降监测点优化配置[J].电工技术学报,2014,29(4):181-187. Zhou Chao,Tian Lijun.An optimum allocation method of voltage sag monitoring nodes based on particle swarm optimization algorithm[J].Transactions of China Electrotechnical Society,2014,29(4):181-187. [16]宫金林,王秀和.基于多目标有效全局优化算法的直线感应电动机优化设计[J].电工技术学报,2015,30(24):32-37. Gong Jinlin,Wang Xiuhe.Optimal design of a linear induction motor using multi-objective efficient global optimization[J].Transactions of China Electrotechnical Society,2015,30(24):32-37. [17]程声烽,程小华,杨露.基于改进粒子群算法的小波神经网络在变压器故障诊断中的应用[J].电力系统保护与控制,2014,42(19):37-42. Cheng Shengfeng,Cheng Xiaohua,Yang Lu.Application of wavelet neural network with improved particle swarm optimization algorithm in power transformer fault diagnosis[J].Power System Protection and Control,2014,42(19):37-42. (编辑 张洪霞) Shuffled Frog Leaping Algorithm Based on Grey Prediction Theory DuJiangYuanZhonghuaWangJingqin (Province-Ministry Joint Key Laboratory of Electromagnetic Field and Electrical Apparatus Reliability Hebei University of Technology Tianjin 300130 China) To enhance the performance of shuffled frog leaping algorithm in solving optimization problems,a new model for hybrid leapfrog algorithm based on grey prediction theory was proposed.The algorithmic evolution model was adjusted to strengthen the ability to exchange the global information in the process of evolution.Then the algorithm implemented the mobile step self-adaption adjustment through introduced mobile step mutation operator.The mutation operator was controlled by the different stages of evolution and the optimal solution progress speed in the process of evolution obtained by grey prediction theory and the fuzzy control thoughts.The advantages of the improved hybrid leapfrog algorithm,such as the accuracy,convergent speed and success rate,and the feasibility of grey prediction theory in the field of algorithm improvement,is verified by comparison with the basic shuffled frog leaping algorithm and the known improved algorithm on performance through six standard test functions.Finally,the practicability of the improved algorithm is proved by applying it to 10 kV oil-immersed distribution transformer optimization design works. Shuffled frog leaping algorithm,grey prediction,mutation operator,optimal design 2016-05-09 改稿日期2016-08-26 10.19595/j.cnki.1000-6753.tces.160634 TP301 杜 江 男,1972年生,博士,副教授,研究方向为变压器优化设计和现代智能仿生算法及其应用。 E-mail:dj@hebut.edu.cn 袁中华 男,1991年生,硕士研究生,研究方向为变压器优化设计和现代智能仿生算法及其应用。 E-mail:1003816201@qq.com(通信作者) 河北省自然科学基金(E2016202134)、河北省人社厅项目(A2013007001)、河北省科学技术研究与发展项目(13210129)和河北省高等学校创新团队领军人才培育计划项目(LJRC003)资助。3 仿真实验





4 实用性验证

5 结论
猜你喜欢
体育教学(2022年4期)2022-05-05 21:26:58
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
物联网技术(2017年5期)2017-06-03 10:16:31
娃娃画报(2016年5期)2016-08-03 19:25:40
上海理工大学学报(2016年2期)2016-06-02 09:22:25
陕西理工大学学报(自然科学版)(2015年6期)2016-01-25 11:00:22
陕西理工大学学报(自然科学版)(2015年6期)2016-01-25 11:00:22
河北科技大学学报(2015年5期)2015-03-11 16:16:37
江苏高职教育(2014年2期)2014-07-16 07:10:04
电测与仪表(2014年2期)2014-04-04 09:04:00