基于GPS/北斗共视技术的铷钟驯服方法
2017-08-30 00:01:21迟华山迟文波强成虎
计算机测量与控制 2017年7期
迟华山,张 磊,迟文波,强成虎
(1.海军装备研究院 博士后科研工作站,北京 100073; 2.海军装备研究院 信息工程技术研究所,北京 102249)
基于GPS/北斗共视技术的铷钟驯服方法
迟华山1,2,张 磊2,迟文波2,强成虎2
(1.海军装备研究院 博士后科研工作站,北京 100073; 2.海军装备研究院 信息工程技术研究所,北京 102249)
为了提升铷钟的频率准确度等性能,以提供高精度的原子频率标准,在分析了现有铷钟驯服方法的基础上,提出了一种基于GPS/北斗共视技术的铷钟驯服方法,将铷钟的输出频率驯服到时间频率的最高国家基准UTC(NIM)上,克服了原来将铷钟频率直接驯服到星载原子钟方法中存在的频率准确度不高的缺点;另外,为了拓展北斗卫星导航系统的应用范围和维护我国在时间频率计量领域的独立自主地位,系统设计中除实现了GPS共视驯服外,还设计兼容了北斗共视驯服模式;试验结果表明,利用基于共视技术的驯服方法可以有效实现对铷钟的驯服,原来相对频率偏差指标为5e-11的铷钟经过GPS和北斗共视驯服后,其相对频率偏差指标分别提升至1.62133e-14和1.36395e-14,提升了3个数量级,达到了铯钟的水平。
共视技术; 铷钟; 驯服
0 引言
随着现代装备信息化水平的不断提升,计量领域对高性能原子频率标准(或称原子钟)的需求越来越大。在众多原子频率标准中,铯原子频率标准的准确度和稳定度等方面性能优异,能够满足日益提高的性能要求,但是铯原子频率标准体积大,价格昂贵,而且国外对其高性能铯钟在我国军事等重要领域的应用有严格的禁止条款,极大限制了其应用范围。另外由于铷频率标准不需要真空系统、致偏磁铁和原子束,因而具有体积小、质量小、预热时间短、价格相对低廉等优点,但是其频率漂移比较大,准确度性能较铯原子频率标准有较大差距,仅能用作二级标准[1-2]。要应用到一些更高精度要求的场合,必须对其进行性能提升。目前广泛采用的方法就是利用卫星导航系统(GNSS,global navigation satellite system)对铷钟进行驯服,从而提高性能,扩展应用。
本论文针对这一需求,将铷振荡器与卫星(GPS和北斗)共视技术、时间同步技术等有机地结合在一起,将铷振荡器输出频率驯服到我国最高的时间频率基准(中国计量科学研究院的UTC(NIM))上,大大提高其频率长期稳定性和准确度,能够为电力、电信、时统、计量校准等提供铯钟量级的高精度时间频率标准。
1 传统铷钟驯服方法
为了提升铷钟的性能,近年来国内外一些科研单位和公司也相继开展了针对铷钟的驯服研究[3-4]。
中科院武汉物理与数学研究所利用GPS授时、测频及时间同步技术,将高稳定性铷振荡器的输出频率驯服于GPS卫星的星载铯原子钟信号上,提高了频率信号的长期稳定性和准确度,而且当GPS失锁或出现异常不可用时,系统能够智能判别,切换到铷钟进行守时,继续提供时间频率信号。
西安同步电子科技有限公司研发的SYN3206型北斗驯服铷原子频率标准,将铷原子频率直接溯源到北斗卫星导航系统的星载原子钟频率标准上,在跟踪到北斗信号24小时后,其驯服铷钟的准确度最高可以达到5e-12水平。
综上,传统驯服铷钟的方法不管采用的是GPS还是北斗手段,都是将铷钟输出频率直接驯服到卫星导航系统的星载原子钟上,其驯服原理如图1所示。
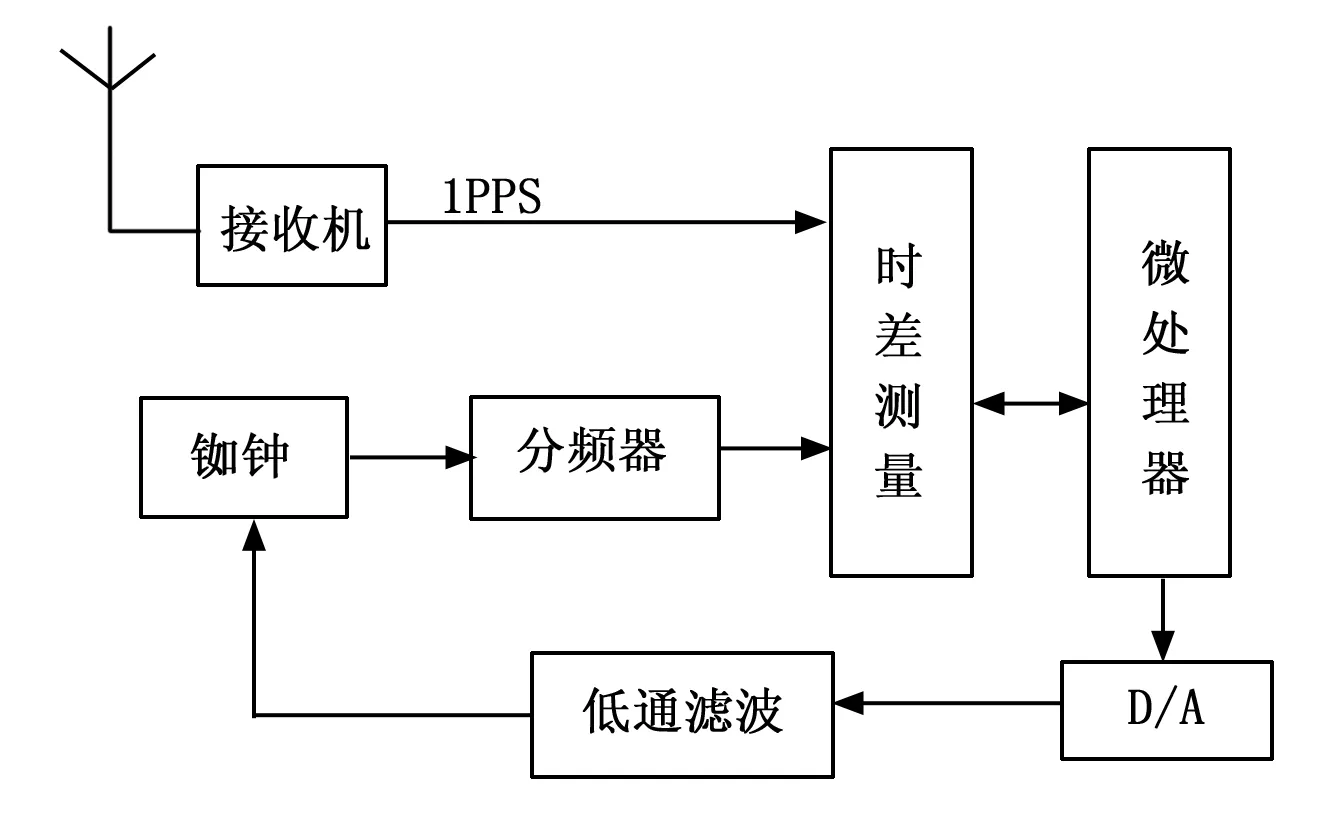
图1 传统驯服铷钟原理框图
利用GNSS驯服铷钟的常规实现方法是:利用GNSS接收机得到1pps信号作为参考标准,将其与待驯服铷钟产生的1pps信号同时输入到高分辨率的时间间隔计数器,进行时差测量,再将这个时差值送入微处理器(通常是一个单片机)内进行处理,计算出驯服铷钟需要的修正值。当确认误差超出门限值时,需要对其进行修正。将以上修正值通过D/A转换,控制铷钟,使其输出频率得到修正,确保其始终跟踪卫星的星载钟,提高了铷钟的输出频率准确度。当接收机接收不到GNSS卫星信号时,微处理器不对铷钟进行调整,使得铷钟能够保持当前状态。
以上直接溯源到GPS或者北斗星载原子频率标准的技术方案虽然也能够实现对铷钟的驯服,提升铷钟的性能指标,但是存在两个问题:(1)信号在卫星和地面铷钟之间的传输过程中存在星载时钟的误差、星历误差及部分对流层、电离层延迟误差,这些误差无疑会对驯服铷钟的准确度和稳定度产生不良影响;(2)直接溯源法的溯源对象是卫星导航系统的星载原子钟,但星载钟受到卫星体积和重量等的限制,其准确度和稳定性相较于地面上高性能的时间频率标准(比如中国计量科学研究院的最高国家基准UTC(NIM))来说,要差很多,造成铷钟驯服的性能无法得到根本提升。
2 基于共视技术的驯服方法
为了克服以上直接溯源至星载原子钟方法的不足,本项目采用了卫星共视驯服的方法实现频率溯源。利用两台接收机同时观测同一颗导航卫星,通过交换数据可以消除共同的时间传递误差,如星载时钟的误差、星历误差、SA影响及部分电离层延迟误差,再通过电离层延时修正、对流层延时修正、多种软件算法,可以实现将铷钟驯服实时同步到UTC(NIM)的时间频率标准,提高了本地铷钟频率信号的长期稳定性和准确度,能够提供铯钟量级的高精度时间频率标准。本项目基于共视方法的铷钟驯服系统的原理框图,如图2所示。
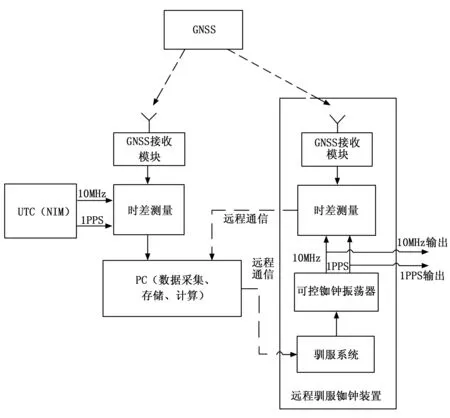
图2 基于共视方法的铷钟驯服系统原理框图
共视铷钟驯服系统由GNSS接收模块、时差测量模块、可控铷钟振荡器和驯服系统等模块组成,其中的GNSS接收模块接收GNSS卫星(GPS或者北斗卫星)发来的信号,与来自可控铷钟振荡器的1PPS信号进行时差比较,测得的时差数据通过远程数据通信传输到计算机PC中存储;另外,中国最高时间频率基准UTC(NIM)数据与来自另一台GNSS接收模块接收的信号进行时差比较,测得的时差数据也传输到计算机PC中存储;在PC中,根据GNSS共视方法对两路时差数据进行处理,即可得到可控铷钟振荡器输出频率与UTC(NIM)标准频率之间的差值,同时输出信号至驯服系统,得到可控铷钟振荡器的控制信号,从而控制铷钟振荡器的输出频率逐渐向UTC(NIM)标准频率靠拢,并最终达到时间同步、频率一致。
计算机中进行的频率差计算公式如下:

其中:fRb为铷钟振荡器的输出频率;fUTC(NIM)为UTC(NIM)的标准频率,为10 MHz;Δf为铷钟振荡器输出频率相对UTC(NIM)标准频率的偏差;为采样周期;为第个采样周期内,铷钟振荡器输出和UTC(NIM)之间的时间偏差。
从图2中可以看到,本项目采用的卫星共视的方法实现频率溯源,作为频率基准的UTC(NIM)钟和驯服铷钟都需要与卫星通信,两路信号传输过程中电离层和对流层等引入的误差,在数据处理单元可以得到抑制甚至消除,从而提高驯服铷钟的准确度。另外,UTC(NIM)作为我国时间频率的最高国家基准,其准确度和稳定性等指标都全面优于卫星导航系统的星载钟,将铷钟输出驯服到UTC(NIM)上,可以保证驯服后铷钟频率的准确度和稳定性。
3 试验验证
为了验证本文基于共视技术的铷钟驯服方法的有效性,进行了GPS和北斗两种驯服模式下的试验。仪器设备放置于实验室常温环境中,实验室环境要求配套220 V交流电源、网络、防静电装置等;室外GNSS接收天线架设于楼顶开阔环境下,要求高度角15度以上完全开阔,周围500米内无强烈电磁干扰等。测试时,仪器设备的连接图如图3所示。
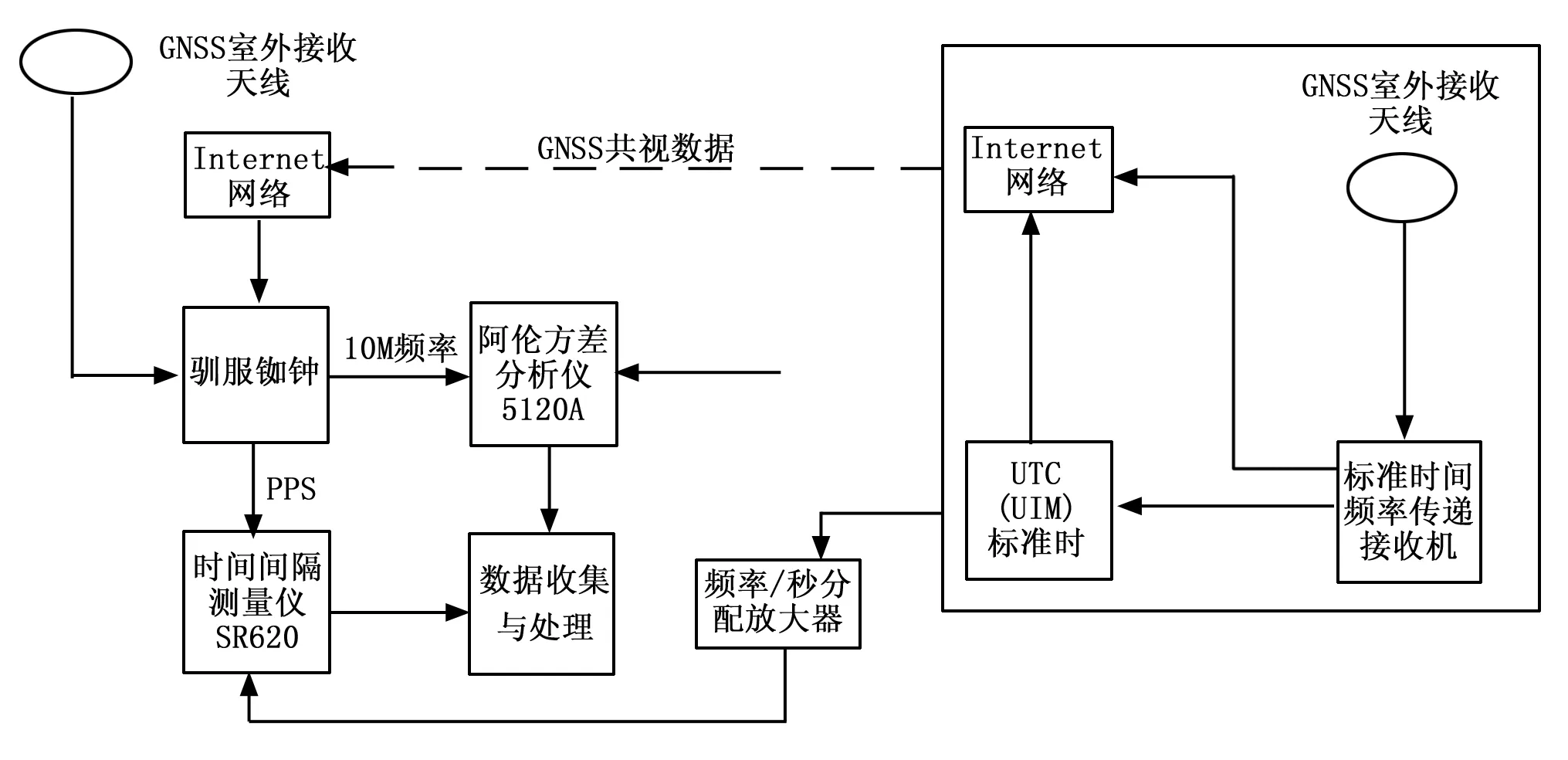
图3 共视法铷钟驯服试验设备连接图
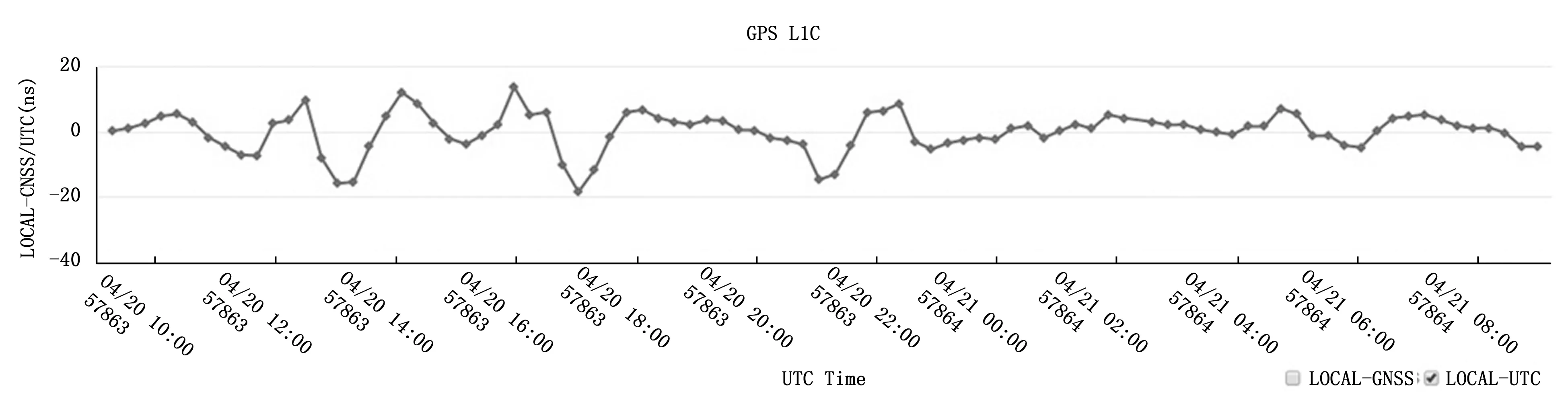
图4 GPS共视驯服模式下的钟差曲线
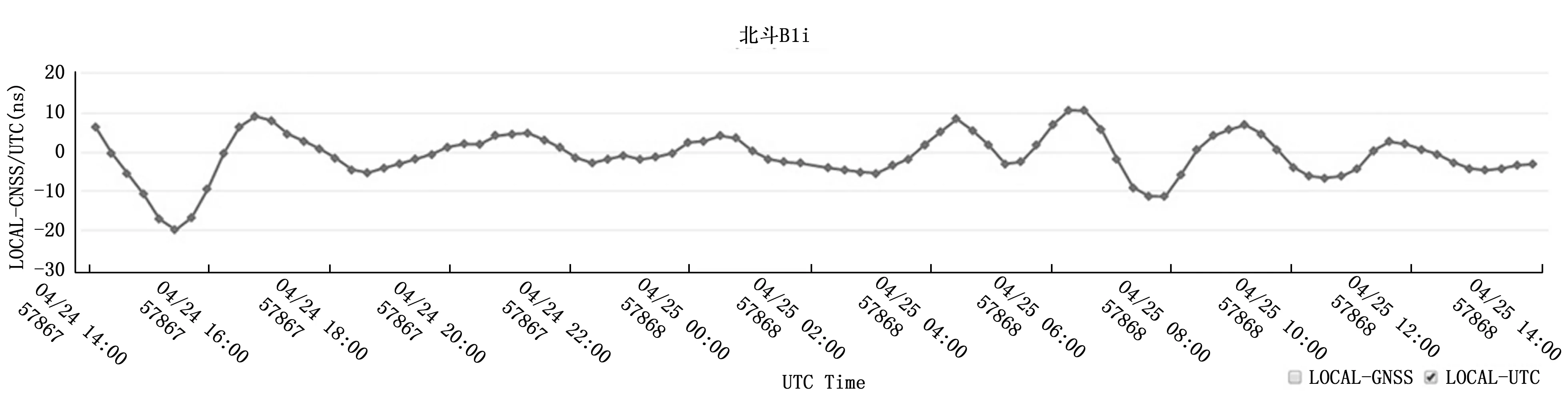
图5 北斗共视驯服模式下的钟差曲线
3.1 GPS模式下铷钟驯服试验步骤和结果
首先将驯服铷钟设备的工作模式设置为GPS驯服工作模式,设备预热后,通过控制软件开启驯服按钮。经过24小时的不间断数据采集,得到驯服铷钟与UTC(NIM)基准之间的钟差数据文件,绘制钟差曲线,如图4所示。
从图4中,可以看到经过GPS共视驯服的铷钟与UTC(NIM)基准之间的钟差很小。经过对试验数据的统计分析,以上钟差值的均值为0.103 371 ns。利用观测得到的钟差数据,经过线性拟合方法解算,可以得到经过GPS共视驯服的铷钟与UTC(NIM)基准的相对频率偏差(1天)结果为1.621 33e-14。
3.2 北斗模式下铷钟驯服试验步骤和结果
将驯服铷钟设备的工作模式设置为北斗驯服工作模式,设备预热后,通过控制软件开启驯服按钮。经过24小时的不间断数据采集,得到驯服铷钟与UTC(NIM)基准之间的钟差数据文件,绘制钟差曲线,如图5所示。
从图5中,可以看到经过北斗共视驯服的铷钟与UTC(NIM)基准之间的钟差很小。经过对试验数据的统计分析,以上钟差值的均值为-0.961 111 ns。利用观测得到的钟差数据,经过线性拟合方法解算,可以得到经过北斗共视驯服的铷钟与UTC(NIM)基准的相对频率偏差(1天)结果为1.363 95e-14。
3.3 试验结论
以上试验中采用的是美国斯坦福公司生产的铷钟模块(型号:PRS10),经查技术说明书,其相对频率偏差指标为5e
-11,其值是典型的铷钟水平。经本文方法的GPS共视驯服后,其相对频率偏差指标提升到1.621 33e-14,经北斗共视驯服后,其相对频率偏差指标提升到1.363 95e-14,提高了3个数量级水平。试验结果表明,GPS和北斗两种模式下的性能指标都得到了极大地提升,达到了与高性能铯钟相当的水平。
4 结束语
本论文采用基于北斗/GPS共视技术的铷钟驯服方法,将铷钟驯服到时间频率的最高国家基准(UTC-NIM)上,保证了频率的准确性和稳定度。试验数据和计算结果表明,本文提出的方法可以有效实现对铷钟的驯服,经驯服的铷钟频率信号指标良好,能够提供铯钟量级的高精度频率标准,具有广阔的应用前景。另外,随着具有我国自主知识产权的北斗卫星导航系统的不断发展和完善,基于北斗共视方法的驯服铷钟的性能还将有更大的提升空间。
[1]周 渭,偶晓娟,周 晖.时频测控技术[M].西安:西安电子科技大学出版社,2006:7-20.
[2]童宝润.时间统一系统[M].北京:国防工业出版社,2003:97-103.
[3]单庆晓,杨 俊. 卫星驯服时钟系统的新进展[J].测试技术学报, 2009,23(5):396-401.
[4]杨旭海,翟惠生.基于新校频算法的GPS可驯铷钟系统研究[J].仪器仪表学报, 2005,26(1):41-44.
Approach to GPS/BDS Disciplined Rubidium Clock Based on Common View Technology
Chi Huashan1,2, Zhang Lei2, Chi Wenbo2, Qiang Chenghu2
(1.Postdoctoral Working Station, Naval Academy of Armament, Beijing 100073,China;2.Information Engineering Technology Institute, Naval Academy of Armament, Beijing 102249,China)
To improve the accuracy of the rubidium clock frequency to provide the atom frequency standard with high accuracy, after analyzing the existing approaches to disciplined rubidium clock, an approach based on GPS/BDS common view technology is put forward in which the output frequency of rubidium clock is disciplined to UTC(NIM) and the existing problem of low accuracy of the old method in which the rubidium frequency is directly disciplined to the satellite carried atom clock is overcome. In addition, to expend the applied range of the BDS and maintain our independent position in time frequency metrology, BDS and GPS patterns are compatible in the system design. The experiments show that the approach based on the common view technology can realize the disciplined rubidium clock effectively, and the rubidium clock frequency accuracy, 5e-11, is improved to 1.62133e-14 and 1.36395e-14 by three orders of magnitude with GPS and BDS patterns respectively and the caesium clock level is reached.
common view technology; rubidium clock; discipline
2017-05-01;
2017-05-05。
迟华山(1978-),男,山东栖霞人,博士,工程师,主要从事时间频率的计量和航空电子技术方向的研究。
1671-4598(2017)07-0306-03
10.16526/j.cnki.11-4762/tp.2017.07.076
TB939
A
猜你喜欢
雪豆月读·中年级(2022年6期)2022-05-30 10:48:04
娃娃乐园·综合智能(2020年10期)2020-11-10 07:19:38
动漫星空(2018年5期)2018-10-26 01:14:48
小哥白尼(军事科学)(2018年8期)2018-09-12 02:07:52
导航定位学报(2018年3期)2018-09-03 00:56:16
建筑科技(2018年6期)2018-08-30 03:40:54
载人航天(2016年4期)2016-12-01 06:56:24
中国交通信息化(2016年5期)2016-06-06 03:51:43
水利科技与经济(2016年9期)2016-04-22 01:07:30
天津冶金(2014年4期)2014-02-28 16:52:58