基于模糊下垂控制的微电网分层协调控制策略研究
2017-08-08 04:20周建萍程启明张纬舟
上海电力大学学报 2017年3期
周建萍, 程启明, 崔 屹, 张纬舟, 王 涛
(1.上海电力学院, 上海 200090; 2.上海发电过程智能管控工程技术研究中心, 上海 200090)
基于模糊下垂控制的微电网分层协调控制策略研究
周建萍1,2, 程启明1, 崔 屹1, 张纬舟1, 王 涛1
(1.上海电力学院, 上海 200090; 2.上海发电过程智能管控工程技术研究中心, 上海 200090)
针对微电网系统中多个微源的协调问题,基于模糊算法改进的下垂控制和微电源各自的工作特性,提出了一种新型的分层控制策略,把模糊下垂控制作为主电源的控制策略,多个微源作为主电源协同维持电网的稳定:将蓄电池作为1级控制的主电源,平抑小功率的负荷波动;将容量大、输出稳定的微型燃气轮机作为2级控制的主电源,应对电网较大功率的负荷波动.最后,通过PSCAD/EMTDC仿真验证了控制策略的有效性.
分布式电源; 微电网; 协调控制; 分层控制; 孤岛运行
微电网技术是目前可再生能源研究领域的热点,能够将分布式能源集中起来,提高系统的接纳能力[1-2].小型独立微电网是未来发展的趋势,就地建成独立微电网可以降低供电压力,同时对可再生发电技术的成本和控制的难题是一个很好的解决方案.然而,随着系统中微电源种类的增加,多微源的微电网在输送、消纳和安全性方面存在越来越多的问题[3-5].
目前,微电网的分层控制研究引起了广泛关注,并取得了一定的成果.微电网分层控制结构一般为3层:顶层为配电网调度和发电计划调度系统;中层为微电网中心,针对单个微电网系统进行调度,承接上一级的命令运行;底层为微电源控制器,并通过通信线与微网中心相连,在系统中传递数据和接收命令.文献[6]提出了一种微电网协调控制方法,对各微源进行数学建模,设计了一个两层的多代理系统,可以很好地对各微源进行协调控制.文献[7]采用代理发展架构(Java Agent Development Framework,JADE)平台构建层次化多样化的多代理系统框架,给出了多微源微网的协调控制策略,利用当地信息和大电网联系,实现电网的稳定运行.相比与并网情况,离网模式下的能量协调控制策略相关研究较少.文献[8]提出了一种离网模式下协调控制策略,考虑到各微源的特性,通过通信线的传递,协调运行维持系统的稳定.
现有文献对微电网的组成和控制等相关研究较多,但涉及系统层级协调控制策略较少.文献[9]提出了一种蓄电池储能系统和柴油发电机组协调完成的分层控制策略,提高了独立微电网频率控制的稳定性和灵活性,但没有考虑到独立微电网实际运行中容易出现的负荷过载的情况.文献[10]提出了一种由分布式电源和微电网中心分别对电压和功率进行控制的两层控制结构,但下垂控制产生的有差调节问题并没有解决.文献[11]提出了一种由多个主电源协同来保证微电网的电压频率的控制方法,可以很好地解决有差调节问题,但没有完整的协调控制方案,在负荷精确分配方面仍有欠缺.文献[12]基于下垂控制,提出了一种不同时间尺度的分层控制策略,由于主电源的控制策略不够完善,控制效果不够理想,但其提出的分层控制策略合理可靠.文献[13]利用模糊PI(比例积分)算法应用在电机自适应控制器上,取得了良好的效果.模糊算法对于多变的环境变量有很好的自适应性,可以考虑引入下垂控制中解决电压环PI参数难整定的问题,取得比传统下垂控制更好的效果.
本文在文献[12]分层控制策略的基础上,针对多微源微电网研究方面目前存在的多微源相互协调问题,基于改进的下垂控制,提出一种新型的分层控制策略,多个微源作为主电源协同维持电网的稳定,使负荷分配更加精确.
1 独立交流微电网的结构
图1为本文所研究的低压交流微电网系统结构,包含微型燃气轮机、光伏发电单元、风力发电单元、蓄电池及重要负荷和可切除负荷,各分布式电源经过逆变器分别接在0.38 kV额定电压的交流母线上.光伏发电单元与风力发电单元的逆变器均采用恒功率控制方法,其中光伏单元逆变之前首先要实现最大功率跟踪,蓄电池和微型燃气轮机(Mirco-turbine Generator,MG)的控制采用恒功率控制(PQ控制)和模糊下垂控制结合的方法.
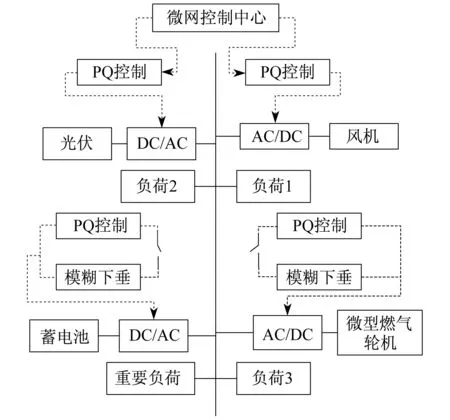
图1 微电网的拓扑结构
2 基于模糊PI算法的下垂控制
传统的下垂控制存在电压和频率幅值波动较大的缺点,同时在不同幅度的波动下,下垂控制电压环PI参数的选取对系统的稳定性具有很大的影响,传统的下垂控制不能实时调整PI参数,针对这一问题,本文引入模糊PI算法,根据电压的波动实时整定PI参数,达到减少负荷波动对系统的影响、增强系统适应性和稳定性的目的.模糊下垂控制的原理如图2所示.
图2中,系统提取电压偏差值e(t)和电压偏差变化率ec(t),通过模糊规则推理出电压环PI控制器的参数KP和KI的值.表达式如下:
(1)
式中:U*(t)——实时电压幅值;Uref(t)——给定电压参考值.
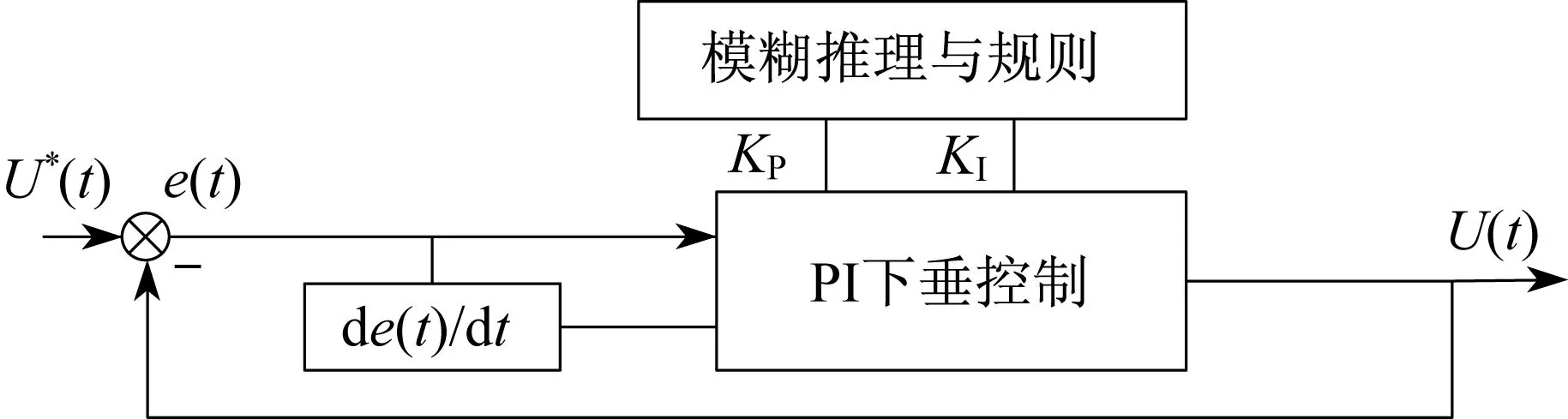
图2 模糊下垂控制结构
在模糊算法中,电压幅值偏差和偏差变化率的基本论域分别取值为[-380,380] V和[-380,380] V/s;量化因子取为0.007;比例因子取为104;使得输入输出变量基本论域经量化后落在模糊集合{-3,-2,-1,0,1,2,3}内,相应的语言变量集合为{负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)}.e(t),ec(t),Kp,KI的隶属度函数如图3所示.

图3 模糊变量隶属度函数
本文建立模糊规则如表1所示,具体含义为:如果e(t)取负大,ec(t)取负大,则KP取正大,KI取负大,其他情况类似,共有49条规则.
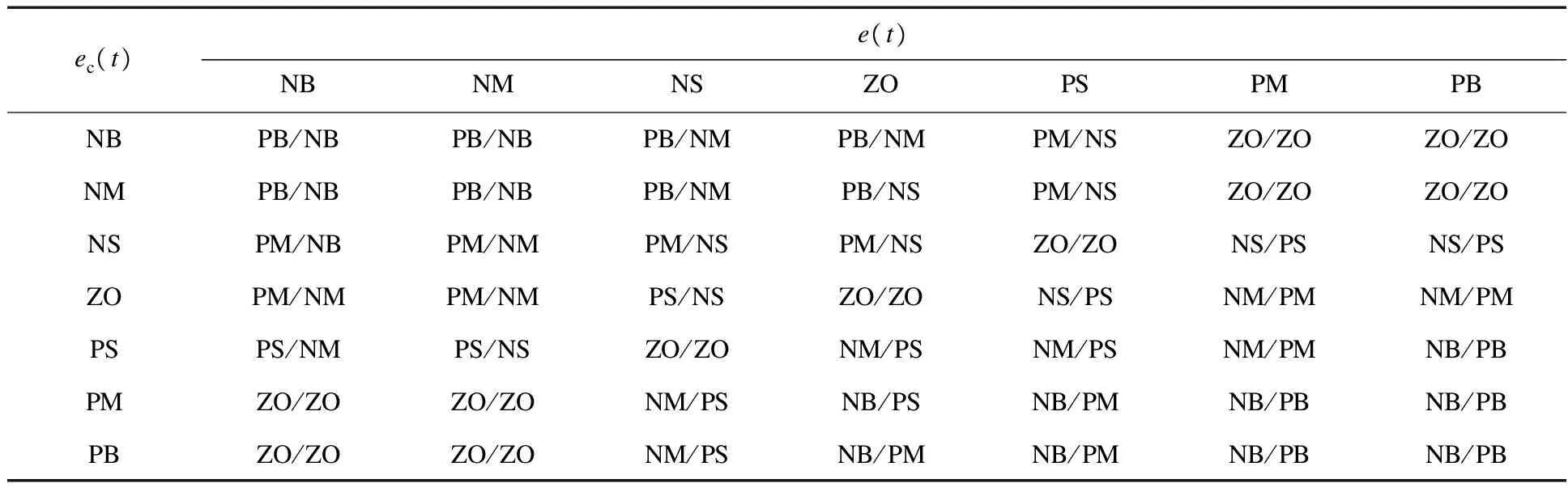
表1 模糊规则
3 分层协调控制策略
在传统的电力系统调频中,3次调频可以应对各种不同幅度的频率波动:1次调频由发电机的调速器进行,应对系统小幅的频率波动;2次调频由发电机调频器进行,对于1次调频无法完全调节的频率波动,由2次调频来进行;3次调频即为优化调度,由调度部分根据负荷曲线分配发电任务.在电力系统3次调频基础上,本文提出一种新型的分层控制结构,包括3层控制.这种3层控制结构的思想主要来源于电力系统中的3次调频问题,分层控制结构如图4所示.

图4 分层控制结构
图4中,1级控制是通过控制蓄电池来实现,满足系统小功率的负荷波动,维持系统电压频率的稳定.2级控制通过控制微型燃气轮机来实现,由于容量的限制,在负荷波动较大情况下,蓄电池的容量不足以平抑系统的功率波动,在这种情况下,微网中心控制器就将主电源切换为微型燃气轮机,而蓄电池根据荷电状态(SOC)进行相应的控制.此外,考虑到极端情况下,负荷波动过大以至于负荷功率超出分布式电源的总发电功率,此时,微网中心控制器应当切除不必要负荷,保证重要负荷的供电.
蓄电池有两个运行状态(作为主电源和非主电源),分别通过模糊下垂控制和PQ控制来进行控制.在蓄电池作为非主电源时,逆变器采用PQ控制,根据参考功率发出系统所需的功率;当蓄电池作为主电源、完成1级控制时,逆变器采用模糊下垂控制方法.微型燃气轮机也分为两种运行状态,同蓄电池一样,分别用PQ控制和模糊下垂控制来进行控制.
微网中心实时检测系统的负荷波动,根据净负荷波动的大小和蓄电池的荷电状态(SOC)来决定系统运行状态,其中净负荷波动的计算公式为:
(2)
式中:Pc——净负荷波动功率;Pload——初始负载功率;Ppv——光伏发电初始功率;Pmg0——微型燃气轮机初始功率;Pbat0——蓄电池初始功率;Pwind——风机初始功率.
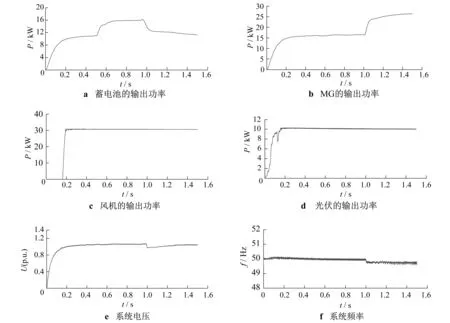
具体分层协调控制结构如图5所示.当净负荷出现波动时,微网中心首先判断波动范围,若Pc≤5 kW,说明波动在蓄电池工作范围内,蓄电池作为主电源跟踪负荷波动即可,在这种情况下,考虑到蓄电池荷电状态的变换,微网中心同时监测SOC的状态,其值小于10%时,蓄电池进入充电状态,MG切换为主电源;若5 kW 图5 分层协调控制策略 本文利用PSCAD/EMTDC仿真软件搭建了仿真模型.主线路电压为0.38 kV,微电源包括蓄电池、微型燃气轮机、风力发电机和光伏发电系统.相关微电源的参数如下:光伏额定功率为10 kW,风机发电的额定功率为30 kW,微型燃气轮机的初始功率为15 kW,蓄电池的初始功率为10 kW,总负荷为75 kW.分别对不同幅度的负荷波动进行了仿真分析,仿真运行结果如图6所示. (1) 在系统运行0.5 s时加入5 kW的净负荷功率波动,系统初始运行状态为蓄电池作为主电源维持系统稳定,各微源运行状态良好,如图6b,图6c,图6d所示;此时的负荷波动在蓄电池的可容纳的波动范围内,图6a显示蓄电池增加了5 kW的输出功率;同时系统对电压、频率均进行了快速调节,保证了系统的稳定性,如图6e和图6f所示.这个仿真结果表明,对于小幅的负荷波动,系统可以进行功率分配,同时稳定系统的电压频率. (2) 在系统运行1 s时净负荷功率的波动增加到10 kW,此时蓄电池的容量不能满足负荷波动的需求,微网中心下达指令,蓄电池恢复之前的运行状态,如图6a所示;MG切换为主电源,发出10 kW的功率,净负荷功率的波动完全由MG响应,此时系统进行了功率分配,如图6b所示;同时系统出现了非常明显的频率波动,如图6f所示,频率由50 Hz减小到49.8 Hz,波动范围在规定的标准内;系统维持稳定,各微源运行正常,如图6c和图6d所示.这个仿真结果表明,在较大幅度功率波动情况下,系统依旧可以通过调节各微源输出功率,保证系统电压和频率的稳定. 图6 仿真运行结果 针对多微源的独立微电网系统,本文提出了一种新型的分层控制策略,即以模糊下垂控制取代下垂控制作为主电源的控制策略,同时多个微源作为主电源协同维持电网的稳定.该系统可在不同幅值负荷波动的情况下保持稳定运行,具有良好的适应性,可对实际研究提供一定的参考. [1] 黄伟,孙昶辉,吴子平,等.含分布式发电系统的微网技术研究综述[J].电网技术,2009(9):14-18. [2] 丁明,张颖媛,茆美琴.微网研究中的关键技术[J].电网技术,2009(11):6-11. [3] 王成山,李鹏.分布式发电、微网与智能配电网的发展与挑战[J].电力系统自动化,2010,34(2):10-14. [4] 周念成,金明,王强钢,等.串联和并联结构的多微网系统分层协调控制策略[J].电力系统自动化,2013,37(12):13-18. [5] PIAGI P,LASSETER R H.Autonomous control of microgrids[C]// Power Engineering Society General Meeting.IEEE Xplore,2006:8. [6] 王晶,李瑞环,束洪春.基于智能多代理的能量协调控制在直流微网中的应用[J].电力自动化设备,2013(7):132-138. [7] 丁明,罗魁,毕锐.孤岛模式下基于多代理系统的微电网能量协调控制策略[J].电力系统自动化,2013,37(5):1-8. [8] 丁明,马凯,毕锐.基于多代理系统的多微网能量协调控制[J].电力系统保护与控制,2013(24):1-8. [9] 唐西胜,邓卫,李宁宁,等.基于储能的可再生能源微网运行控制技术[J].电力自动化设备,2012,32(3):99-108. [10] 白园飞,程启明,吴凯,等.独立交流微电网中储能电池与微型燃气轮机的协调控制[J].电力自动化设备,2014,34(3):65-70. [11] 马艺玮,杨苹,王月武,等.提高电能质量的风柴蓄独立微电网分层协调控制[J].华南理工大学学报:自然科学版,2015(4):104-111. [12] 高春凤,杨仁刚,井天军.独立微电网有功功率自主与协调控制[J].农业工程学报,2014(10):113-121. [13] 张洪帅,王平,韩邦成.基于模糊PI模型参考自适应的高速永磁同步电机转子位置检测[J].中国电机工程学报,2014,34(12):1 889-1 896. (编辑 桂金星) Research on Hierarchical Coordinated Control Strategy of Micro-grid Based on Fuzzy Droop Control ZHOU Jianping1,2, CHENG Qiming1, CUI Yi1, ZHANG Weizhou1, WANG Tao1 (1.ShanghaiUniversityofElectricPower,Shanghai200090,China; 2.ShanghaiEngineeringResearchCenterofIntelligentManagementandControlforPowerProcess,Shanghai200090,China) Regarding the coordination problem of micro-grid system with multiple micro sources,a new hierarchical control strategy is put forward based on fuzzy droop control as control strategy of the main power supply,and several main powers working together to maintain cooperative micro grid stability,with the battery as the main power of 1 level control,and in the face of fluctuations of small power.The micro gas turbine with large capacity and stable output is taken as the main power source 2 level control,which faces large power fluctuation.Finally,the effectiveness of the proposed control strategy is verified by PSCAD/EMTDC simulation. distributed energy source; micro-grid; coordinated control; hierarchical control; islanded operation 10.3969/j.issn.1006-4729.2017.03.001 2017-03-07 周建萍(1978-),女,博士,副教授,江西萍乡人.主要研究方向为分布式发电与微网技术等. E-mail:zhoujianping@shiep.edu.cn. 国家自然科学基金(61275038);上海市重点科技攻关计划(14110500700);上海市科学技术委员会工程技术研究中心资助项目(14DZ2251100). TM711;TM76 A 1006-4729(2017)03-0211-05
4 系统仿真分析
5 结 语
猜你喜欢
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
通信电源技术(2016年6期)2016-04-20
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
电测与仪表(2015年16期)2015-04-12