单片门电路鱼缸水位控制系统的设计
2017-08-08 11:13:50王姗
重庆电子工程职业学院学报 2017年3期
王 姗
(重庆电子工程职业学院,重庆401441)
单片门电路鱼缸水位控制系统的设计
王 姗
(重庆电子工程职业学院,重庆401441)
文章研究并设计了一种高精度鱼缸水位监控系统,能够实现信号采集、处理和水泵驱动等功能,并能自动补水和控制水位。利用独立电路采集超高水位与超低水位信号和控制继电器开关,控制水泵开或关的工作循环,实现自动检测水位和自动补水。设计的系统结构简单,制造成本低廉,灵敏度较高。
水位;水泵;单片门电路;自动补水
0 引言
随着人们生活水平的提高,对家居休闲产品的需求不断增加。生态鱼缸是目前需求较大的一种休闲产品。生态鱼缸的底滤、测滤、角滤能够对鱼缸中的水进行过虑和净化。鱼缸水泵促进水不断循环,加快了鱼缸中的水蒸发,每天每个无盖鱼缸蒸发1~4升的水量。鱼缸中的水蒸发后,必须及时补充,否则会导致鱼缸的水循环系统不能正常工作,甚至烧毁水泵。及时给鱼缸补充水往往也给家庭带来负担,特别是家庭成员出差或旅游外出时,无人给鱼缸补充水,成为困扰家庭养鱼的难题。
设计开发鱼缸自动补水控制系统,对养鱼爱好者具有很高的实用价值。设计的补水控制系统应具有体积小、成本低廉、控制方便、易于操作的优点。
1 水位自动控制器设计
1.1 设计构想
利用简单的电子线路和独立的水泵设计一种控制装置,对鱼缸水位进行自动检测与补水控制[1]。通过控制系统,使鱼缸中的水位保持一定的高度范围内,当水位低于下限时,水泵自动供水;当水达到水位上限时,水泵自动停止供水。根据控制原理可知,要实现控制对象的被控量(测定值)自动比较给定值,控制系统应具有测量、比较、执行等三种基本功能。利用单片门电路执行器来实现这三种功能。按偏差调节控制原理如图1所示。

图1 按偏差调节的控制原理
1)被控量:调控的水位高低;
2)受控对象:贮水容器(鱼缸)中的水;
3)测量器件:水位探头将水位值转化为相应的电位值;
4)给定值:是水位的上限值和下限值;
5)计算比较:将测量得到的水位实际值与给定值进行比较;
6)执行机构:驱动水泵电路工作和开启指示灯;7)执行器件:为水泵注水。
在上限水位和下限水位之间设定系统的阈值范围。当测定值在阈值范围内,执行器件不工作;当测定值超出阈值范围,执行机构驱动水泵自动补水。从图1表明,控制系统是一个闭合回路,系统是根据按偏差调节原则设计的,只要被控量的偏离值达到修正阈值,系统就能自行纠偏,实现水位自动补偿,实现鱼缸自动补水或停止供水。
1.2 设计方案
控制器电路由电源电路、水位信号采集与检测电路、输出驱动执行电路三部分组成[2],图2所示。
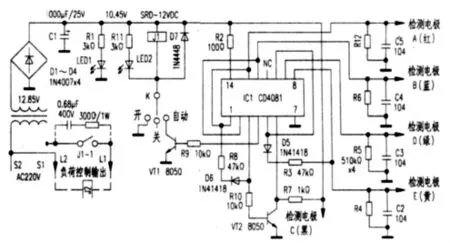
图2 水位控制电路
下面分别分析电源电路、水位信号采集与检测电路、输出驱动执行电路。
1.2.1 电源电路
电源电路直接与220V的交流电源联接,经过变压器电路、整流电路、滤波电路和稳压电路,得到低压直流输出。首先,220V电压经变压器降压。其次,输出低压交流电加至由D1—D4构成的桥式整流输入端,整流后经电容CI滤波得到大约为10V的直流电压,并经R1可开启红色发光管LED1,并送到水位检测电极上。10V的低压电不影响鱼缸内鱼的生命。
1.2.2 水位信号检测电路
水位信号检测与监控电路以四二输入与门电路CD4081为核心,并由五根水位检测电极探针 A、B 、C、D、E 构成,一般情况下只使用 A、B、C三个电极探针。根据系统电极实测水位的变化,把测量值反馈至CD4081相应的引脚,以实现电平调节,以驱动输出电路,进而执行元件驱动水泵[3]。
1.2.3 输出驱动电路
输出驱动主要由驱动管(三极管)VT1、继电器J1、功能选择开关K和能实现输出状态指示的绿色发光管LED2组成。在功能选择开关处于“开”的位置时,继电器J1被强制工作,相应触点J1-1闭合,外接负荷(单相电动水泵或控制接触器)开始工作,实现强制补水(人工干预补水),开启输出状态指示绿色发光管LED2;在处于“关”的位置时,J1-1触点断开,外接负荷被全部切断;处于“自动”位置时,J1工作受驱动管VT1控制。当VT1基极电位处于高电平时,驱动管饱和导通,继电器通电,开始吸合动作,开启绿色发光管LED2,驱动水泵实现补水。当VT1基极电位低电平时,驱动管截止,继电器J1-1失电,绿色发光管LED2关闭,驱动水泵断电,水泵停止泵水。
1.3 主要元器件选择
1)门电路 IC1:选用 CD4081,四-2输入与门集成电路;
2)驱动三极管VT1、VT2:选用8050小功率晶体NPN型三极管,放大倍数大于50;
3)整流二极管 D1~D4:选用 IN4007,整流二极管;
4)发光管LED1:电源加电指示,红色发光管;发光管LED2:输出状态指示,绿色发光管;
5)二极管 D5~D7:选用 IN41418,D5、D6 为隔离自锁二极管;
6)电容C2—C5:滤除信号干扰。
2 实验结果
2.1 水位控制逻辑
鱼缸自动补水示意图如图3所示。
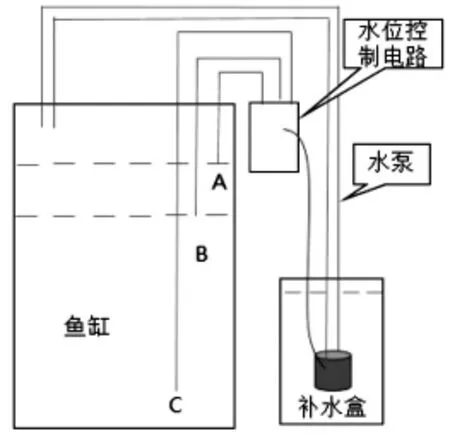
图3 鱼缸自动补水示意图
电极探针A用于设置水位上限控制点。水位上升到A点水位,水与探头接触,由于液体的导电性,A、B两极接通,导致水泵供水断开,水位控制器自动关闭水泵。电极探针B是水位下限液位控制点,水位下降到B点水位时,水与探头接触脱离,水位控制器自动开泵,鱼缸充水。电极C为地线,与鱼缸底部接触。当水位低于电极B时,驱动管VT1饱和导通,水泵向鱼缸内补水。随着水位升高,检测电极B升至高电位,鱼缸继续补水。当水位上升到上限水位控制点A点时,与门输出端VT2饱和导通,VT1截止,水泵失电,外控水泵停止工作,补水停止。
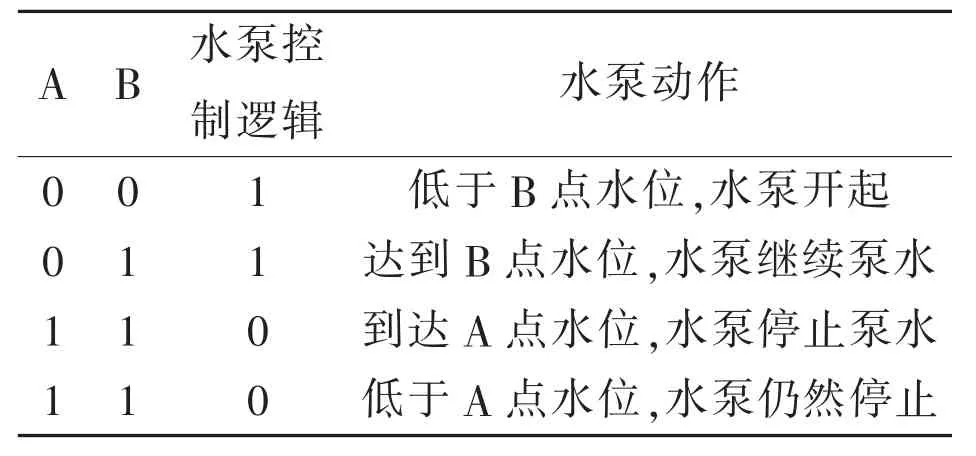
表1 水位控制程序表
系统控制门电路执行逻辑:水位低于B点,执行控制门电路导通,水泵控制逻辑为“1”,水泵执行注水动作;水位高于B点但低于A点,执行控制门电路继续导通,水泵控制逻辑为“1”水泵继续执行注水动作;水位到达A点,执行控制门电路截止,水泵控制逻辑为“0”,水泵停止注水;鱼缸水量蒸发,水位降低,但水位低于A点高于B点,执行控制门电路继续截止,水泵控制逻辑为“0”,水泵无动作;直至水位下降至B点,执行控制门电路再次导通,水泵控制逻辑为“1”,水泵再次执行注水动作。
2.2 水位监控实验
表1为鱼缸自动补水实验参数和结果。
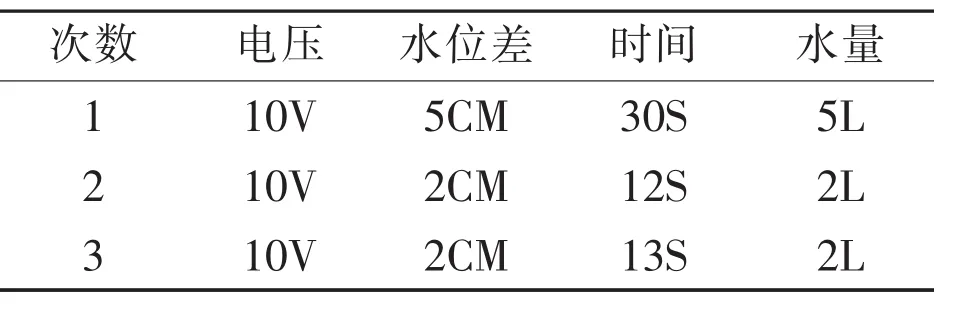
表1 鱼缸自动补水实验
首先,将水位探测电极A、B、C置于鱼缸中,其中C置于缸底,B与A置于鱼缸最低目标水位(下限水位)和最高目标水位(上限水位)。第一组实验使鱼缸水位低于最低水位,接通电路,控制电路接受检测电极信息,输出二极管点亮开始向鱼缸补水。当水位达到B(下限水位)后继续补水,直至升到上限水位,水泵停止。实际注水高度5厘米,注水量5升,用时30秒,水泵停止注水。
鱼缸水量蒸发,水位下降,低于上限水位但高于下限水位,水泵停止,输出二极管无显示。当水位达到下限水位时,输出二极管开启,开始向鱼缸补水,达到上限水位,水泵停止,实际注水高度2厘米,注水量2升,用时12秒,水泵停止注水。此后监控电路把鱼缸水位控制在上限水位与下限水位之间。
系统的控制精度不宜设置太高,实验可知A、B两个电极探针的高度差一般不低于2厘米,以保证系统在阈值内自动补水。
3 结语
设计的系统能实时监测并控制鱼缸水位,采用分立元件电路控制鱼缸补水。设计的水位控制器生产成本低,实用价值大,在鱼缸无人值守的环境下,能实现自动补水。实验结果表明,采用的技术路线合理,设计方法可靠。
[1]李明伟,陈守雄.模糊液位控制器的设计与MATLAB仿真[J].自动化技术与应用,2006(6):21-22.
[2]牛标,张代远.可监控智能液位控制器系统设计[J].计算机技术与发展,2010(7):188-191.
[3]胡寿松.自动控制原理[M].北京:科技出版社,2001:1-12.
责任编辑仇大勇
TU273.5
A
1674-5787(2017)03-0146-03
10.13887/j.cnki.jccee.2017(3).38
2017-02-15
本文系重庆市教育科学规划课题“高职学院多学科无纸化考试平台建设与应用”(项目编号:2012-GX-188)的阶段性研究成果。
王姗(1989—),女,在职硕士研究生,重庆电子工程职业学院,助教,研究方向:机电一体化与专业英语。
猜你喜欢
水泵技术(2021年5期)2021-12-31 05:26:46
小猕猴学习画刊(2021年10期)2021-04-18 00:18:44
昆钢科技(2021年1期)2021-04-13 07:55:04
小读者(2020年2期)2020-11-26 09:34:07
幽默大师(2020年11期)2020-11-26 06:12:08
小学生必读(低年级版)(2019年12期)2019-04-20 08:39:28
小雪花·成长指南(2019年12期)2019-02-10 11:17:04
时尚北京(2018年1期)2018-01-22 20:11:30
都市丽人(2017年6期)2017-07-25 20:40:35
设备管理与维修(2016年7期)2016-04-23 06:51:55