
基于灰色模型的锂电池充电技术研究
2017-08-08 03:00史永超崔纳新李超群
电源学报 2017年4期
王 枫,史永超,2,崔纳新,李超群
(1.山东大学控制科学与工程学院,济南 250061;2.华为技术有限公司,深圳 518129)
基于灰色模型的锂电池充电技术研究
王 枫1,史永超1,2,崔纳新1,李超群1
(1.山东大学控制科学与工程学院,济南 250061;2.华为技术有限公司,深圳 518129)
由于电池系统具有非线性和迟滞性等特点,电池模型的准确性和实用性难以兼顾。针对此问题,建立和验证了基于灰色控制理论的锂离子电池灰色模型。应用该模型研究了相关的电池充电技术,并提出了基于灰色模型的充电终止判断技术以消除电池系统迟滞性带来的影响,以及采用灰色PID控制技术跟踪充电曲线以减轻电池系统非线性带来的控制精度不高的问题。实验结果表明,相对于传统PID控制,灰色PID跟踪充电曲线具有更高精度。
灰色模型;灰色PID;锂电池;充电
随着传统汽车行业的发展,由此带来的环境问题和能源压力日益增大。电动汽车凭其绿色环保、能量转换效率高等特点开始兴起。作为电动汽车的动力来源,动力电池技术和电池充电技术也在不断发展进步。电动汽车电池的“职业生涯”是在反复充放电过程中走向终点的,电池放电过程取决于实际工况,充电过程则与充电技术息息相关。作为电动汽车的动力源,电池的性能好坏及其寿命长短直接影响了电动汽车的性能和续航能力。而相较于传统汽车,充电时间长,续航里程短却是电动汽车的主要短板之一[1]。因此,快速无损充电技术对于电动汽车的发展意义重大。快速充电能够提高效率,节约时间,使电动汽车的使用更加方便灵活;而无损充电则能减缓电池损耗,延长电池寿命,从而减缓续航能力的衰减。
本文在传统的电池模型和充电方法的研究基础上,应用灰色系统理论建立了电池的灰色模型,并在该模型的基础上改进了传统的充电方法以解决电池系统非线性和迟滞问题。
1 灰色电池模型的建立与验证
1.1 电池模型概述
现有的电池模型大体可以分为3类:电化学模型、等效电路模型和数学模型[2-4]。电化学模型基于电化学理论,使用大量偏微分方程描述电池内部的反应过程,涉及结构参数较多,同时解出所有方程需要巨大的计算量,难以实时运行和控制,通常用于电池参数设计和结构优化;通过降阶简化可以减少计算量但精确度会降低[5-6]。等效电路模型包括线性模型、RC网络模型和交流阻抗模型等[7-10],将电池的端电压视为电流的函数,并将相应的函数关系通过电气元件组成电路表示出来,更加直观,适宜与电路结合进行仿真。数学模型是根据经验或者数学原理,通过对实验数据的拟合来描述电池特性,是抽象模型,参数没有明确的物理意义,比如Shepherd模型、Unnewehr模型和Nernst模型、神经网络模型及本文建立的灰色模型均属于此类,前3种模型的精度不高,而神经网络模型受限于训练方法和数据,适用于成熟产品[2,5,7,11]。总之,电池模型的选择和建立要根据模型的用途,对精度和复杂程度进行权衡取舍,本文目标是对电池充电过程进行在线预测和控制,所以在保证精度的基础上要求易于实现。
对于电池系统,影响电池模型的因素很多,但只有部分可控,这正是典型灰色系统的特征[12]。灰色系统理论是用来解决灰色系统问题的新兴学科,通过对部分已知信息进行采集和处理,提取相关信息来描述系统的运行规律,对系统进行科学预测[13]。本文以灰色系统理论为基础,利用部分历史充放电数据建立了电池的灰色模型。相较于传统模型,灰色电池模型只需少量历史数据,计算量相对较小,易于实现,同时该模型的精度较高,模型整体误差不超过0.35%。
1.2 灰色电池模型的建立
灰色系统模型一般定义为GM(m,n),m为阶数,n为变量个数,其公式可定义为
式中:x1为输出变量;x2,x3,…,xn为输入变量;a1,a2,…,am-1和 b1,b2,…,bm-1为相关系数。其中,GM(1,1)为最简单的预测模型,即单变量的1阶模型。电池参数部分可知,部分未知,正是灰色系统,若对电池进行恒流充电,将电池电压作为输出,则可用GM(1,1)模型来模拟电池的充电过程[14]。
模型建立的具体步骤如下:
步骤1获取电池电压原始序列,即
V(0)= {v(0)(1),v(0)(2),…,v(0)(n)} (n≥4)(2)式中,v(0)(1),v(0)(2),…,v(0)(n)为电池电压。
步骤2累加原始序列,建立1-AGO序列为
步骤 3 设 Z(1)为 V(1)的紧邻均值(MEAN)生成序列,则

则GM(1,1)的定义模型,即灰微分方程模型为


其中:
则有

式(10)为灰色微分方程式(7)的白化方程,也叫影子方程。
步骤4 解白化方程式(10)可得

则GM(1,1)灰色微分方程(7)的时间响应序列为

令 x(1)(0)=x(0)(1),则还原值为

由此建立灰色模型。
1.3 灰色电池模型的验证
利用现有的电池实验平台给电池充电,记录相关数据进行计算预测,对模型精度进行校准。电池主要参数见表1。

表1 磷酸铁锂单体电池主要参数Tab.1 Main parameters of LiFePO4battery
按照参数对电池进行0.8C恒流充电,分别选取3 min、5 min、8 min的采样间隔,对动力电池电压进行灰色预测。图1为充电过程中电池电压的变化曲线,以及灰色预测值的分布点。

图1 0.8C充电时的电池端电压及GM(1,1)模型电压预测值Fig.1 Battery terminal voltage and predictive voltage value of GM(1,1)model at 0.8C charge rate
本文采用残差检验的方法对GM(1,1)模型进行精度检验,即对模型值和实际值的残差进行逐点检验。 首先按模型计算,原始序列 v(0)(i)与作差后得到绝对残差序列Δ(0)及相对残差序列φ,并计算平均相对残差。 给定 α,当,且φn<α成立时,称模型为残差合格模型。按照此残差模型对灰色模型进行检验,其电压的平均相对残差值分布如图2所示。由图可见,该模型整体误差小于0.35%;在充电初期与末期模型预测误差较大,这是电池端电压的快速变化引起的;对于不同的采样时间间隔的误差,3 min小于 5 min,5 min小于 8 min,说明采样间隔也影响电池灰色模型的精度。
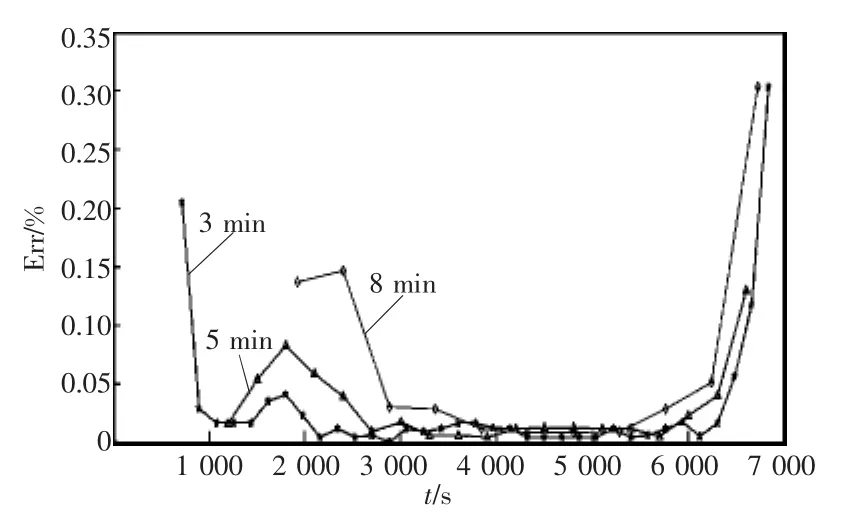
图2 不同采样间隔电池灰色模型误差分布Fig.2 Error profiles of grey battery model for different sampling time
2 基于灰色模型的电池充电技术
2.1 基于灰色模型的电池充电截止判断技术
在充电末期,由于内阻变化及电池极化等原因,电池电压迅速升高,在采集、传递和处理的过程中会有一定程度的滞后。传统的充电方法在检测到电池电压达到预设电压时才终止充电,对系统响应的滞后性考虑不足,此时电池可能已经过充,这将会损伤电池,影响寿命,尤其是大电流快速充电。基于灰色模型的电池充电截止判断技术正是在充分考虑了迟滞作用的影响后提出的应对策略。该技术是将下一时刻模型预测值替代当前时刻实际值,再与给定值进行比较,从而判断是否终止充电。该技术可以用于恒流充电、脉冲充电以及间歇充电等多种充电方法。
对于恒流充电,在充电过程中,将下一时刻模型预测值与设定值比较,若相等或超过,则停止充电;否则继续。图3为动力电池充电终止判断示意。预测模型的最后一个点超过充电终止电压3.65 V,则停止充电。对于脉冲充电、间歇充电等快速充电技术,由于充电电流大,欧姆极化电压较大,即开路电压和端电压相差较大。如果仍以电池端电压作为判断标准,则容易造成电池充电不足,因此可采用开路电压作为判断标准。通过建立电池开路电压的灰色模型,预测开路电压并与设定值进行比较,以判断是否终止充电,电池脉冲充电波形如图4所示。

图3 动力电池充电终止判断示意Fig.3 Charging termination determination of power battery

图4 电池脉冲充电波形Fig.4 Charging voltage profile of pulse current
2.2 灰色PID控制技术
由于动力电池系统难以建立精确的数学模型,而且存在非线性、迟滞等特点,传统的PID控制技术控制精度不高。灰色PID控制技术是在传统PID的基础上,通过电池的灰色模型预测下一时刻输出值,并将其与下一刻的给定值比较,进行补偿校正,从而降低非线性、迟滞等因素对系统的影响,提高控制精度。其控制框图见图5。具体步骤如下:
步骤1采样电池充电电流,建立电流时间序列I[n]。
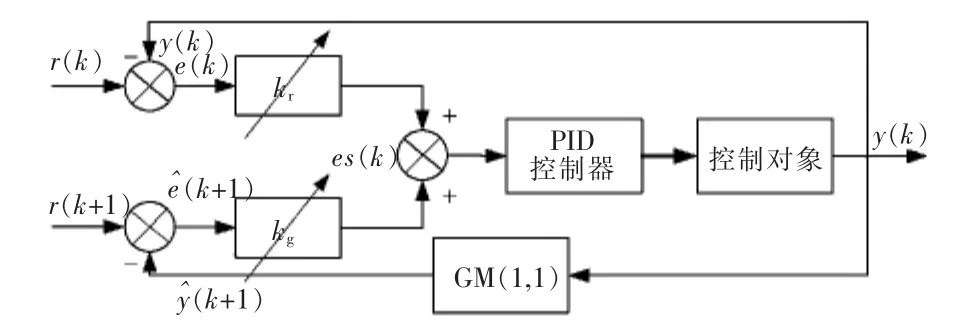
图5 灰色PID控制框图Fig.5 Control block of grey PID
步骤2 根据GM(1,1)灰度模型,预测下一时刻充电电流,并与下一时刻给定电流比较作差,得到预测误差。
步骤3 利用预测误差e(k+1)和实际误差e(k),
添加比例因子构成当前时刻的输入值,即

式中,kr、kg为比例因子。
步骤4根据校正后的误差信号进行PID控制。
3 实验结果对比与分析

图6 充放电电路硬件主电路拓扑Fig.6 Topology of the hard ware main circuit
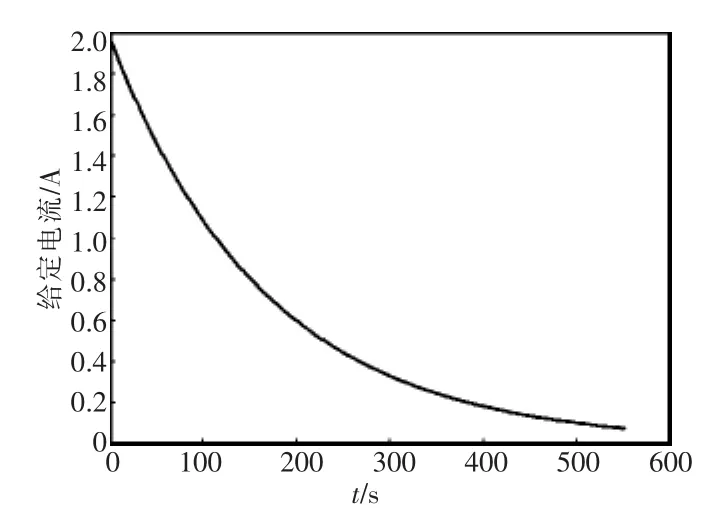
图7 给定的指数充电曲线Fig.7 Specified exponential current profile

图8 充电过程中电流误差百分比Fig.8 Tracking error during charging
实验平台的充放电电路硬件主电路如图6所示。采用给定充电曲线的方法对电池进行充电,分别采用传统PID控制技术和灰色PID技术进行控制,然后对二者的跟踪误差进行对比。根据马斯快速无损充电理论拟定给定充电曲线I=1.8e-2t,式(14)中的比例因子各取0.5。图7为给定的电池充电曲线,图8为传统的PID控制与灰色PID控制的电流误差百分比。
观察两条误差曲线随时间的变化趋势可知,在充电开始的阶段,误差波动较大,随着充电进行,波动不断减小。这主要与充电电流的变化趋势有关,充电初期电流大且变化快,而充电后期充电电流小且平缓,跟踪难度逐渐降低,因此误差波动逐渐减小,趋于稳定。对比两条曲线可知,灰色PID控制误差百分比整体上小于传统PID控制技术,控制精度较高,但优势并不突出,仍有较大的提升空间。
4 结语
通过建立、验证灰色模型,并将基于该模型的充电方法的实验结果与传统方法进行对比,可以得出如下结论:相较于传统电池模型,本文使用的灰色模型建立过程简单,只需处理部分历史数据即可预测下一时刻的数据,且恒流充电过程中预测值和实际值的对比说明该模型的预测精度高,误差较小,适合在线实时运行;此外,由于提前预测了参数的变化并做出校正,基于灰色模型的PID控制技术相较于传统PID控制技术跟踪误差更低。
[1]陈全世.先进电动汽车技术[M].北京:化学工业出版社,2007.
[2]Gould C,Wang Jiabin,Stone D,et al.EV/HEV Li-ion battery modelling and state-of-function determination[C]//Power Electronics,Electrical Drives,Automation and Motion(SPEEDAM),2012 International Symposium on.IEEE,2012:353-358.
[3]Tsang K M,Chan W L,Wong Y K,et al.Lithium-ion battery models for computer simulation[C]//2010 IEEE International Conference on Automation and Logistics,2010:98-102.
[4]贾玉健,解大,顾羽洁,等.电动汽车电池等效电路模型的分类和特点[J].电力与能源,2011,32(6):516-521.
Jia Yujian,Xie Da,Gu Yujie,et al.Classification and characteristics of equivalent circuit models for EV’s battery[J].Power&Energy,2011,32(6):516-521(in Chinese).
[5]陈全世,林成涛.电动汽车用电池性能模型研究综述[J].汽车技术,2005(3):1-5.
Chen Quanshi,Lin Chengtao.Summarization of studies on performance models of batteries for electric vehicle[J].Automobile Technology,2005(3):1-5(in Chinese).
[6]Klein R,Chaturvedi N A,Christensen J,et al.Electrochemical model based observer design for a lithium-ion battery[J].IEEE Transactions on Control Systems Technology,2013,21(2):289-301.
[7]Hussein A A,Batarseh I.An overview of generic battery models[C]//Power and Energy Society General Meeting,2011 IEEE.IEEE,2011:1-6.
[8]Dannier A,Ferraro L,Miceli R,et al.Numerical and experimental validation of a LiFePO4battery model at steady state and transient operations[C]//Ecological Vehicles and Renewable Energies(EVER),2013 8th International Conference and Exhibition on.IEEE,2013:1-6.
[9]翟燕飞,何志超,杨耕,等.采用阶跃电流辨识电池参数时电流幅值的确定方法[J].电源学报,2017,15(2):135-141.
Zhai Yanfei,He Zhichao,Yang Geng,et al.A method of determining current amplitude for battery parameter identification using step-change current[J].Journal of Power Supply,2017,15(2):135-141(in Chinese).
[10]梁奇,于春梅,王顺利,等.基于PNGV电路模型的航空钴酸锂电池内阻研究[J].电源学报,2017,15(2):153-158.
Liang Qi,Yu Chunmei,Wang Shunli,et al.Research on internal resistance of aviation battery based on PNGV circuit model[J].Journal of Power Supply,2017,15(2):153-158(in Chinese).
[11]Charkhgard M,Farrokhi M.State-of-charge estimation for lithium-ion batteries using neural networks and EKF[J].IEEE Transactions on Industrial Electronics,2010,57(12):4178-4187.
[12]Deng Julong.Control problems of grey systems[J].Systems&Control Letters,1982,1(5):288-294.
[13]Luo R C,Chen T M.Autonomous mobile target tracking system based on grey-fuzzy control algorithm[J].IEEE Transactions on Industrial Electronics,2000,47(4):920-931.
[14]Wai R J,Tu C H.Adaptive grey control for hybrid resonant driving linear piezoelectric ceramic motor[J].IEEE Transactions on Industrial Electronics,2006,53(2):640-656.
Lithium Battery Charging Technology Research Based on Grey Model
WANG Feng1,SHI Yongchao1,2,CUI Naxin1,LI Chaoqun1
(1.School of Control Science and Engineering,Shandong University,Jinan 250061,China;2.Huawei Technologies Co.,Ltd.,Shenzhen 518129,China)
It's difficult to balance the accuracy and practicality of a battery model because of the nonlinearity and hysteresis of a battery.To solve this problem,a grey model for lithium-ion battery based on grey system theory was established,and validated.Applied for lithium-ion battery fast charging technology research,the charging termination determination technology based on grey model was proposed to eliminate the negative impact of hysteresis,and the grey PID control technology was used to lighten the effect of nonlinearity when tracking the charging profile.Experimental results show that the grey PID control technology has higher precision compared with the conventional PID control technology.
grey model;grey PID;lithium battery;charging

王枫
王枫(1992-),男,硕士研究生,研究方向:充电机设计及充电方法,E-mail:fen gwangsdu@hotmail.com。
史永超(1989-),男,硕士,研究方向:充电机设计及充电方法,E-mail:chinashiyc@sina.com。
崔纳新(1968-),女,通信作者,博士,教授,研究方向:变频节能、电动汽车、电池管理系统,E-mail:cuinx@sdu.edu.cn。
李超群(1991-),男,硕士研究生,研究方向:电动汽车无线充电技术研究,E-mail:dgdaqun@sina.com。
10.13234/j.issn.2095-2805.2017.4.79
TM912
A
2015-12-10
国家自然科学基金资助项目(61633015,615278 09);山东省重点研发计划资助项目(2016ZDJS03A02)
Project Supported by National Natural Science Foundation of China(61633015,61527809);Key Research and Development Program of Shandong Province(2016ZDJS03A02)
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
汽车维修与保养(2021年8期)2021-02-16
北京航空航天大学学报(2020年10期)2020-11-14
小学生学习指导(低年级)(2020年3期)2020-06-02
自动化学报(2019年6期)2019-07-23
动漫星空(兴趣百科)(2019年3期)2019-03-07
Coco薇(2017年2期)2017-04-25
Coco薇(2017年2期)2017-04-25
海外星云(2016年17期)2016-12-01
为了孩子(3~7岁)(2016年8期)2016-05-14
