
基于Matlab的汽车ABS系统设计
2017-08-07 06:20:08李孟
舰船电子工程 2017年7期
李孟
(南阳理工学院南阳473000)
基于Matlab的汽车ABS系统设计
李孟
(南阳理工学院南阳473000)
介绍了一种基于Matlab中的Simulink工具箱对汽车的ABS防抱死系统进行建模的方法,首先由汽车ABS系统的制动原理对参与制动过程的各部件进行建模实现,主要模块包括如车轮模型、轮胎模型与逻辑门限控制模块等。根据实际情况设置所建模型的具体参数和进行仿真实验的参数,最后分别以相同的30m/s的初速在三种不同附着系数的路面上对其进行仿真验证,主要针对制动距离、制动时间及车速与轮速这几个对制动效果起决定作用的量进行研究,通过对仿真曲线的对比分析,证明该系统在不同的路面情况下都能够达到良好的制动效果。
Matlab;ABS防抱死系统;逻辑控制
Class NumberTP311
1 引言
随着电子技术的发展,在汽车的研发和生产中对电子设备的要求也越来越高,为满足汽车行业研发与设计的需要,越来越多的汽车工业技术中用到了建模仿真技术。作为Matlab中重要的功能组件Simulink,免去了用户自己编写代码的繁琐,能够实现对动态系统的建模与仿真[1],在此工具箱的编译环境中,可以使用简单的直观的工具箱添加功能来实现复杂的仿真,在控制理论与数字信号处理过程中的复杂仿真与设计都能够使用。本文介绍了应用Matlab中的Simulink工具箱进行建模仿真的系统,其主要功能是对ABS防抱死系统进行仿真验证[2],验证其控制策略与算法的可靠性。用于辅助和改进汽车ABS防抱死系统的设计,减少实车试验的工作量,提高工作效率。
2 ABS系统建模设计思路
使用Simulink工具箱进行建模仿真时,一般要分为两步来进行,首先要对仿真模型进行搭建,其次是对仿真过程中的参数进行设置,设置的参数要符合实际应用的要求,能够真实反映模型在实际中的具体应用。完成之后就可模拟所建模型在设置参数下的具体行为,从而对系统的性能来进行评估与改进。
在本系统中,根据汽车制动过程的工作原理,要分别对轮胎、液压制动系统、制动器等部位进行建模实现;考虑到汽车在制动过程中是否启动ABS防抱死制动由逻辑门限控制模块决定,而逻辑门限模块又与车轮滑移率和路面附着系数等参数密切相关,相应要建立对应参数模型;结合汽车正常行驶过程中受到的空气阻力与运动阻力,建立汽车动力学模型。
如图1所示为在MATLAB中使用Simulink工具箱搭建的ABS防抱死系统模型。
仿真模型建立后,根据实际情况对模型进行参数设置,由于本系统所建模型是参照家用小型轿车,仿真模型中的参数可参照家用小型轿车的参数值。
在仿真模型中的参数设定如表1所示。

表1 仿真模型中参数设定
3 主要模块介绍
3.1 车轮模型
在仿真建模的过程中,为了简化模型,只考虑车辆在做纵向直线运动时的动态过程制动情况,对其横摆与侧向运动情况不做考虑[4]。
水平运动方程为
车轮转动运动方程:
车轮纵向摩擦力:
垂直方向平衡方程:
滑移率:
式中,M为1 4车辆总质量(kg),Fx为地面制动力(N),J为车轮转动惯量(kg/m2),R为车轮半径(m),Tb为制动力矩(Nm),μ为地面附着系数,Fz为法向压力(N),v为车身速度(m/s),vw为车轮轮速,S为滑移率。
式中c1、c2和c3为待定系数。
由式(6)可得最佳滑移率与最大附着系数为
3.2 轮胎模型
轮胎的纵向附着系数μ与滑移率S之间的函数关系为
μg是滑移率为100%时的附着系数,路面状况不同,参数c1、c2、c3和Sk、μmax、μg值不相同,典型路面参考值如表2所示。
由于汽车制动过程中,其纵向附着系数和滑移率之间并不是简单的线性关系,为了使建模更加符合实际制动过程中的情况,在这里采用双线性模型来对制动过程中的轮胎模型进行简化处理,可得如式(9)所示
3.3 逻辑门限控制模块
车辆的制动过程中,为达到最佳制动效果一般将滑移率控制在最佳滑移率附近一段小区间。若超出此区间,将相应指令发送给中央处理单元,对制动进行调整。在本系统采用将车轮加速度与滑移率两个门限值相结合的制动策略,在制动过程中需要计算出此时的车轮加速度,结合同时刻的滑移率,选择合适制动模式。本系统的逻辑门限控制模块如图4所示。
4 仿真结果分析
在对ABS防抱死系统的各个子模块进行Simulink仿真系统建模后,按照实际制动过程设置参数来进行仿真实现[8]。设置车辆的制动过程初始阶段的速度为30m/s,由于制动过程中对前轮与后轮的制动效果不同,需要对主动轮与从动轮设置不同的逻辑门限值。为了能够分析在不同的路面情况下本系统都具有较为良好的制动效果,分别设置不同的附着系数路面为例,以制动距离、车速和轮速为评价标准来进行研究。具体参数设置如表3所示。
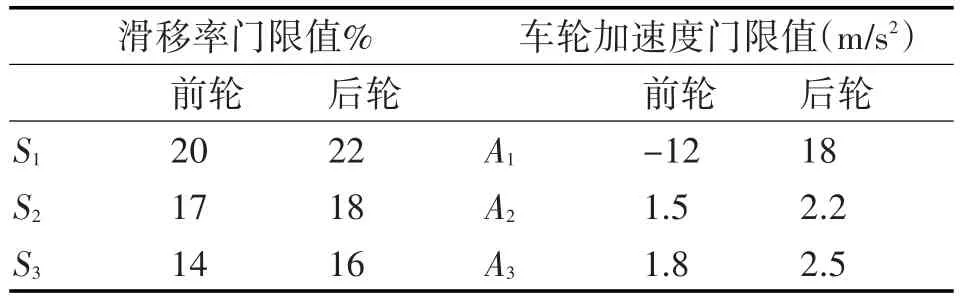
表3 控制参数
1)在高附着系数(μ=0.95)的路面上
高附着系数路面上在制动距离仿真曲线如图5所示。初速为30m/s的情况下,汽车的制动距离约为42m,与之对应的制动时间约为3.1s。
2)在中附着系数(μ=0.55)的路面上
中附着系数路面上在制动距离仿真曲线如图7所示。初速为30m/s的情况下,汽车的制动距离约为52m,与之对应的制动时间约为4.7s。
3)低附着系数(μ=0.16)的路面上
低附着系数路面上在制动距离仿真曲线如图9所示。初速为30m/s的情况下,汽车的制动距离约为87m,与之对应的制动时间约为8.8s。
不同附着系数路面上的制动距离与制动时间仿真曲线图,车速与轮速仿真曲线对比,可得本系统在不同路面情况的制动距离和制动时间,满足系统的制动要求,得到合适的制动控制效果[10]。本系统在建模过程中利用子模块的功能实现对车速变化曲线与轮速变化曲线,得其在不同制动情况下的吻合效果都较为良好,也能够证明在本系统中使用的轮速与车速算法的实用性与准确性。
5 结语
本文采用Matlab的Simulink工具箱对ABS防抱死系统进行建模,介绍单轮子模块、轮胎子模块及逻辑门限控制子模块,对仿真模型中的参数进行设置,最后进行实验验证,设置不同的附着系数以相同的制动初速度进行仿真验证,对制动过程中的制动距离、制动时间的仿真曲线分析,证明本系统对不同附着率的路面均能实现较好的制动性能,对车速与轮速的变化曲线进行对比,得出其在不同制动情况下的吻合效果都较良好。
[1]周景润,张丽娜,基于MATLAB与fuzzyTECH的模糊与神经网络设计[M].北京:电子工业出版社,2010:47-93.
[2]Jeon Y S,Mok H S,Choe G H,et al.A New Simulation Model of BLDC Motor with Real Back EMF Waveform[J]. Poceeding form Computers in Power Electronics,2011,18(2):17-20.
[3]Cheng Jun,Vehicle Control System Design by Use of MATLAB/SIMULINK[J].Automotive Research and Development,2009(3):7-10.
[4]李彬等.模糊逻辑控制的改进与仿真[J].机械工程与自动化,2012(4):23-25.
[5]雷敬川.对汽车ABS系统的浅析[J].科技信息,2014(7):35-40.
[6]张集乐.ABS轮速传感器及其信号处理[J].机械与电子,2013(12):12-15.
[7]丁守福.基于Matlab计算机仿真在液压系统中的应用[J].煤矿机械,2014(9):46-51.
[8]张亮,郭仕剑,王宝顺.MATLAB7.X系统建模与仿真[M].人民邮电出版社,2006:8-12.
[9]王琦,徐式藴,赵睿涛.MATLAB基础与应用实例集粹[M].北京:人民邮电出版社,2007:99-102.
[10]张集乐.ABS轮速传感器及其信号处理[J].机械与电子,2014(12):12-15.
[11]齐志权,刘昭度,马岳峰,崔海峰.汽车防抱系统参考车速确定方法[J].农业机械学报,2014(9):27-29.
Design of Anti-lock Braking System of Automobile Based on Matlab
LI Meng
(Nanyang Insitute of Technology,Nanyang473000)
This dissertation introduces a method based on Matlab Simulink in the car ABS anti-lock system,which describes the main modules,such as a wheel model,the tire model with the logic threshold control module.And then specific model parameters and simulation parameters are set to built the module,and finally in the 30m/s velocity were carried out on the simulation in the different road,According to analisis the braking distance,braking time and the speed of the wheel,proves that the system for a variety of road has relatively good braking effect.
Matlab,ABS anti-lock braking system,logic control
TP311
10.3969/j.issn.1672-9730.2017.07.021
2017年1月17日,
2017年2月20日
李孟,男,硕士研究生,讲师,研究方向:电子信息信号处理。
猜你喜欢
汽车安全与节能学报(2022年2期)2022-07-17 07:42:50
汽车实用技术(2022年10期)2022-06-09 11:33:44
汽车实用技术(2020年24期)2021-01-05 08:22:04
小读者(2019年24期)2020-01-19 01:51:36
疯狂英语·新悦读(2019年11期)2019-12-18 05:14:16
汽车观察(2019年2期)2019-03-15 06:00:34
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:30
发明与创新·中学生(2016年7期)2016-05-14 04:08:26
专用汽车(2015年4期)2015-03-01 04:10:02
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:31
