基于ASIFT与RANSAC算法的岩体结构三维重建方法研究
2017-08-01 00:00熊自明王明洋张清华
隧道建设(中英文) 2017年7期
熊自明, 董 鑫, 王明洋, 张清华, 马 超
(1. 解放军理工大学爆炸冲击防灾减灾国家重点实验室, 江苏 南京 210007; 2. 南京理工大学机械工程学院, 江苏 南京 210094)
基于ASIFT与RANSAC算法的岩体结构三维重建方法研究
熊自明1, 2, 董 鑫1, 王明洋1, 2, 张清华1, 2, 马 超1
(1. 解放军理工大学爆炸冲击防灾减灾国家重点实验室, 江苏 南京 210007; 2. 南京理工大学机械工程学院, 江苏 南京 210094)
隧道开挖过程中岩体结构面信息获取的快慢和准确程度直接影响隧道施工的安全,针对三维重建算法效率低的问题,提出一种基于ASIFT与RANSAC算法的岩体结构三维重建方法和策略。首先采用普通数码相机快速获取一系列真实描述岩体结构的数字影像; 然后针对岩体影像比例尺与倾斜角变化大、纹理相对贫乏的特点,采用ASIFT匹配算法与RANSAC误匹配点剔除算法来保证立体影像之间稀疏匹配的效率和可靠性; 最后采用光束法联合平差方法对系列影像之间的相对位置与姿态进行求解,并综合利用核线几何约束、半全局匹配、多视最小二乘匹配等策略实现岩体影像的密集匹配,最终提取出岩体的三维信息。工程实践表明: 基于ASIFT与RANSAC算法的岩体结构三维重建方法可以方便地实现工程岩体结构面完全非接触式测量,有效提高测量效率, 避免测量人员暴露于未支护岩体下的危险。
岩体结构; 三维重建; 非接触测量; 掌子面影像; ASIFT算法; RANSAC算法
0 引言
隧道开挖掘进过程中岩体结构面的产状是最为基本的地质信息,对工程的开展与建设具有重要的指导意义[1]。采用传统的人工罗盘方法采集岩体结构面信息,不仅作业效率低、劳动强度大,而且受现场条件限制,只能获取有限的可接触的结构面信息,会影响岩体稳定性分析结果的准确性。为此,一些学者研究采用三维激光扫描技术和数字近景摄影测量技术来获取岩体结构的三维信息,并取得了一定的成果[2-5]。三维激光扫描设备价格相对昂贵,仅能获取结构面的三维坐标信息,缺乏表面纹理信息; 而采用数字近景摄影测量技术重建岩体结构的三维信息,具有成本低、容易实现的特点,且能够构建出完整的岩体结构模型,包含岩体的三维坐标、对应纹理等信息,更加有利于岩体稳定性的分析。在数字近景摄影测量技术研究方面: G. Roberts 等[6]研究了基于摄影测量的岩体结构面信息采集与处理系统; W. C. Haneberg[7]应用数字近景摄影测量对岩质坡度建立三维模型并进行结构面测图工作,探讨了获取的结构面产状与人工测量产状的差别,但并未进行精度统计; 奥地利Startup公司推出一套岩体几何参数三维非接触测量系统ShapeMetriX 3D,王述红研究团队[8-11]应用ShapeMetriX 3D系统采集岩体开挖结构面数据,并自主研制了岩土工程建模与分析系统GeoSMA-3D,进行数据处理与分析,实现了岩体内不稳定块体的快速识别与搜索。文献[12-13]基于数字摄影测量工作站获取岩体结构面几何信息的研究,采用VirtuoZo重建岩体结构面的三维信息,并对岩体结构进行分析与研究。上述研究取得了一定成果,但大部分采用专业的测量相机作为影像获取设备,测量前需要标定相机、测量控制点及设计控制网等,给非测量专业人员的工程测量实践带来难度。
为简化摄影测量的处理过程,提高三维重建的作业效率,本文提出一种基于ASIFT匹配算法和RANSAC误匹配点剔除算法的系列影像岩体结构三维重建方法和综合策略,并通过工程实例验证本方法的有效性。
1 岩体影像连接点的自动匹配
影像间同名连接点的自动提取与可靠匹配是各张影像位置、姿态估计的前提,也是利用二维影像重建岩体结构面三维信息的第1步。
1.1 ASIFT算法
岩体影像之间往往存在较大的倾角,使得影像之间的同名像点及其周围纹理难于匹配。与现有的稀疏匹配算法[14-15]相比,ASIFT匹配算法[16]具有较好的尺度不变和仿射不变特征,是对SIFT算法的改进,适用于岩体影像间连接点的自动提取与匹配。
影像间的位置与姿态关系见图1。假设μ是基准影像,ν是倾斜影像,φ是影像ν轴线相对基准影像μ的旋转角,θ是影像的倾斜角。

图1 影像间的位置与姿态关系
以影像μ为基准,对不同视角拍摄的影像ν进行变换,分别由倾斜角和旋转角生成1组模拟影像ν′(φ,θ),其公式为:

(1)
式中:λ为影像间的比例系数;t为影像倾斜角产生的投影系数。
ASIFT算法的主要过程: 1)模拟所有可能的仿射影像。通过设置不同的旋转角φ和倾斜角θ,对倾斜影像ν进行变换与重采样,可以生成一系列仿射影像。2)确定出仿射影像中效果最佳的模拟影像。选择仿射影像中与基准影像上同名点的方向一致,且倾斜方向上2幅影像的比例尺相接近的模拟影像。3)用SIFT算法进行匹配。利用SIFT算法对最佳模拟影像与基准影像进行特征提取与匹配,获取影像中稀疏同名像点。
1.2 RANSAC误匹配点剔除
岩体影像中纹理信息相对较少、灰度变化不明显,往往存在一些误匹配点,对后续的影像间位置与姿态求解很不利。为能够有效剔除误匹配点,本文采用随机抽样一致性算法[17-18](random sample consensus,简称RANSAC)来检测这些点。
RANSAC算法的基本思想是,先选择任意2个特征点并确定1条直线,将该直线两侧一定范围内的特征点称为该直线的支撑; 再重复进行上述步骤,将其中最大支撑特征集的直线称为样本点集的拟合,而在拟合的误差距离范围内的点称为内点,在拟合的误差距离范围外的点称为外点。由于随机选择的包含外点的初始点集所确定的直线一般不会获得多数特征点支持,因此该算法会将这些直线所对应的匹配点当作外点并剔除掉,如图2所示,其中点a被认为是外点并剔除。上述直线拟合只是一种简单的变换模型,对于岩体或者隧洞而言,采用仿射拟合模型更加合适且其基本原理与直线拟合是一样的。因此,本文在使用RANSAC算法剔除误匹配点时使用仿射变换作为其拟合模型。

图2 RANSAC剔除误匹配点示意图
采用索尼相机拍摄2幅金瓶岩隧洞掌子面影像(见图3),分辨率为4 928×3 264。由图可见: 掌子面影像信息量相对贫乏,不同视角拍摄的影像存在明显的比例尺差异和倾斜效应等。因此,以这2幅掌子面影像为例,验证上述稀疏匹配算法的有效性。先用ASIFT算法提取、匹配2幅影像的同名像点; 再用基于仿射拟合模型的RANSAC算法剔除匹配结果中存在的误匹配点,其结果见图4。

(a) 原始影像1

(b) 原始影像2
根据统计分析,经典SIFT算法粗匹配、ASIFT算法粗匹配、常规RANSAC-ASIFT算法与本文基于仿射拟合模型的RANSAC算法剔除误匹配点的对比结果见表1。由表1可知: 采用ASIFT算法对隧洞掌子面影像进行匹配处理,匹配正确率比采用经典SIFT算法提高了10.9%,但仍然存在较高的误匹配率,必须检测出其中的误匹配点并进行剔除。采用本文基于仿射拟合模型的RANSAC算法剔除误匹配点,匹配正确率比采用常规RANSAC-ASIFT算法提高了3.5%,2幅影像中的同名像点的匹配率得到了明显的提高,为下一步影像间位置与姿态估计提供了更可靠的同名像点。
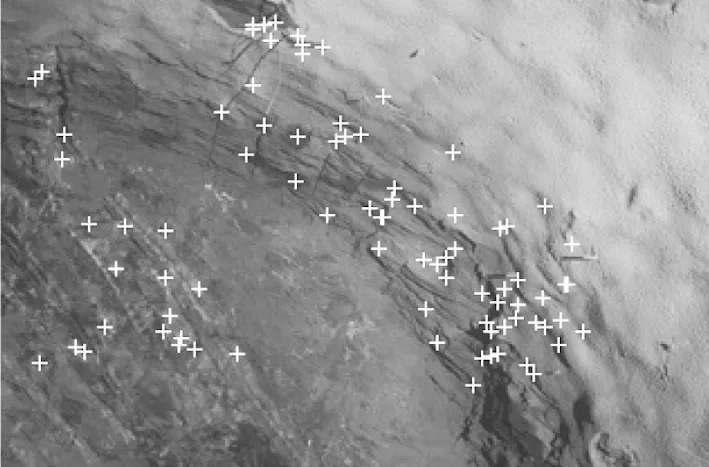
(a) 匹配影像1的同名像点

(b) 匹配影像2的同名像点
图4 RANSAC-ASIFT算法获取掌子面影像的同名像点结果
Fig. 4 Homonymous points of tunnel face images by RANSAC-ASIFT algorithm

表1 粗匹配与误差剔除效果
2 稀疏光束法平差的相机位置与姿态求解
解算影像获取时各摄站的位置与姿态信息,是岩体结构三维重建过程中的关键一步[19-21]。稀疏光束法平差[22-23](sparse bundle adjustment)是在光束法平差的基础上发展而来的一种利用Levenberg-Marquardt算法最佳地求解相机参数和三维点坐标的方法,本文采用该方法来求解各摄站的位置与姿态信息。
2.1 算法原理
假设相机在成像过程中处于理想状态,分别从不同视角获取目标岩体的影像,如图5所示。其中:O1、O2为摄站位置;I1、I2分别表示摄站对应的影像。在固定坐标系中,相机的位置与姿态可以用7个参数来描述,即旋转参数Θ=(θ1,θ2,θ3),平移参数t=(t1,t2,t3)和相机焦距f。

图5 目标三维点与影像中同名像点之间的关系
Fig. 5 Relationship between three-dimensional target points and homonymous image points
在图5中,每1对匹配点都对应着一个目标三维点,而其三维坐标可用稀疏光束法平差的方法计算得到。经推导可知,稀疏光束法平差的误差方程就是所有三维点在对应影像上的像点误差的平方和,即

(2)
式中:I为参与平差的所有影像;χ(i)为影像i所对应的三维点列表。

(3)
采用Levenberg-Marquardt算法求解的迭代方程为:
(4)
通过分析,矩阵JTJ的结构为:
(5)

根据式(5),可将式(4)写为
(6)

(7)
2.2 平差策略
为保证稀疏光束法平差的精度,考虑到岩体影像的特点,具体的平差处理过程如下。
1)步骤1。选择连接点较多的影像对作为平差初始影像,以影像对中左影像的空间坐标系为岩体模型的局部坐标系,先利用相对定向、空间前方交会可得到初始影像对之间的位置与姿态关系以及连接点坐标的初始值,再利用稀疏光束法平差方法来优化结果。
2)步骤2。添加1幅新影像,结合已求解的三维点坐标和影像之间的匹配点,利用空间后方交会方法估计新影像的位置与姿态信息,用空间前方交会方法计算出对应特征点的坐标,并再次通过稀疏光束法平差方法来优化结果。
3)步骤3。依次添加所有影像,若某影像与其他任一幅影像的匹配点太少,即小于4对同名像点,那么该影像不处理; 否则,按照步骤2方法循环处理,直至所有影像全部处理完毕。
3 多视密集匹配重建岩体结构三维信息
在已知相机位置与姿态的前提下,通过对系列影像上同名像点进行多片前方交会,可计算出对应点的物方坐标。实现自动重建的关键在于系列影像上同名像点的匹配,考虑到岩体影像的特点,本文将半全局匹配算法[24-25](semi-global matching,简称SGM)引入到岩体影像的密集匹配过程中,并综合采用核线几何约束方法、金字塔分层匹配策略等增强匹配的稳健性,提高匹配的效率。密集匹配重建岩体结构三维流程见图6。
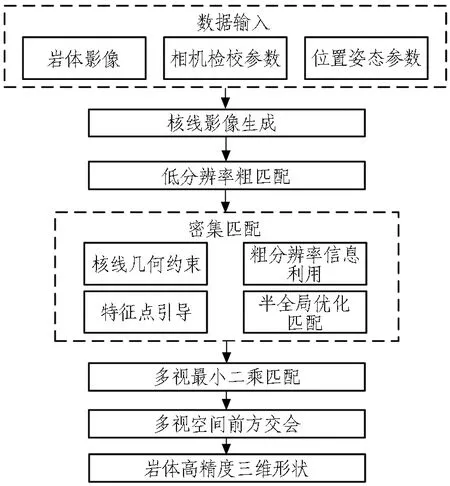
图6 密集匹配重建岩体结构流程
Fig. 6 Flowchart of 3D rock mass structure reconstruction by intensive image matching
SGM算法的基本思想是: 先基于互信息执行逐像素代价计算,再用多个一维的平滑约束来近似1个二维的平滑约束。假设参考影像像素点p灰度为Ibp,对应待匹配影像的同名点q灰度为Imq。函数q=ebm(p,d)表示匹配影像上对应于参考影像像素点p的核线,核线参数是d。那么,基于MI的匹配代价函数为:
CMI(p,d)=hIb, fD(Im)(Ibp,Imq)-hIb(Ibp)-hfD(Im)(Imq)。
(8)
式中:hIb(Ibp)、hfD(Im)(Imq)分别为以像素点p、q为中心的块图像的熵;hIb,fD(Im)(Ibp,Imq)为2个块图像的联合熵。
沿着路径r方向,像素点p的代价Lr(p,d)由递归方式定义为:Lr(p,d)=C(p,d)+min{Lr(p-r,d),Lr(p-r,d-1)+


(9)
式中P1、P2为惩罚系数。
将各方向的代价相加,可以得到总的匹配代价

(10)
对于每一个像素点p,深度dp=mindS(p,d)。最后还需要进行一致性检查,即比较匹配点对的深度值,进而生成相对连续的岩体结构三维信息。利用上述密集匹配算法和处理策略对摄取的4幅影像进行密集匹配,生成1组隧洞掌子面局部区域的三维信息,结果见图7。可见: 在已知相机位置与姿态的情况下,利用本文所提方法可以恢复出重叠区域的三维信息,且掌子面上的裂痕和皱褶特征显示清晰,说明该方法与策略是正确可行的。

图7 密集匹配重建掌子面局部三维结果
Fig. 7 Partial 3D result of intensive matching reconstruction of tunnel face
4 工程应用与结果分析
4.1 工程概况
成兰铁路地处青藏高原东部边缘高山峡谷区,相对高程差达1 km,斜坡坡度一般为30°~50°,地形切割强烈,岩体受挤压破碎严重,易发生局部掉块、洞口失稳或整体坍落等危险。隧道掌子面数据采集是在井下爆破并完成排险出渣工序后进行的,由于后续的注浆喷护及锚杆支护工作需立刻进行,因此数据采集时间非常有限,一般须在10 min内完成所有数据的采集工作。以金瓶岩隧道D1K191+938里程掌子面为例,在施工过程中利用索尼数码相机在5 min内获取了14张影像。对得到的系列影像数据进行分析,可知: 相机摄取掌子面影像时倾角变化较大,比例尺也是随机的; 影像纹理相对贫乏,受光照影响较大; 所有影像都处于无序状态。
4.2 岩体影像三维重建过程与结果
应用ASIFT匹配算法与RANSAC误匹配点剔除算法对上述影像进行匹配处理,共获取3 168个匹配点,经过稀疏光束法平差可解算出对应点的三维坐标,归化至同一坐标系中,结果见图8。同时,还原相机的相对位置与姿态,其平差精度小于0.4个像素。

图8 连接点的三维结果
图8示出的连接点三维坐标精度相对较好,已经基本构成了岩体结构的框架,但是这些连接点相对稀疏,局部区域还存在空洞现象。因此,需要对系列影像进行密集匹配,获取更加稠密的同名像点,并通过多视密集匹配所获取的同名像点计算出对应的三维坐标,最终得到更为细致的岩体结构信息,三维重建结果见图9。共获取岩体表面三维点数约230万个。由图9可知: 掌子面的细节得以正确恢复,很好地重建了隧洞掌子面的三维形状。图10示出纹理映射结果。

图9 隧洞掌子面的三维重建结果

图10 隧洞掌子面的纹理映射结果
局部区域的三维重建结果见图11,可见掌子面的中央区域存在数条倾斜的裂隙,进一步说明了岩体表面三维信息恢复较好。

图11 局部区域三维重建结果
4.3 三维重建结果岩体结构分析
将金瓶岩隧道D1K191+938里程掌子面影像的重建结果导入岩体结构分析软件Sirovision V6.0中,人机交互地进行结构面划分、产状信息提取、不稳定结构指示、岩性识别和超欠挖对比等分析,结果见图12—16。可知: 采用本文方法得到的三维重建结果可以高度还原真实的岩体结构特征,便于后期工作人员进行岩体结构分析。
5 结论与讨论
5.1 结论
1)针对岩体影像倾角大、比例尺不统一、纹理贫乏的特点,在特征匹配过程中利用ASFIT匹配算法与RANSAC误匹配点剔除算法可获取影像间较为可靠的同名像点。
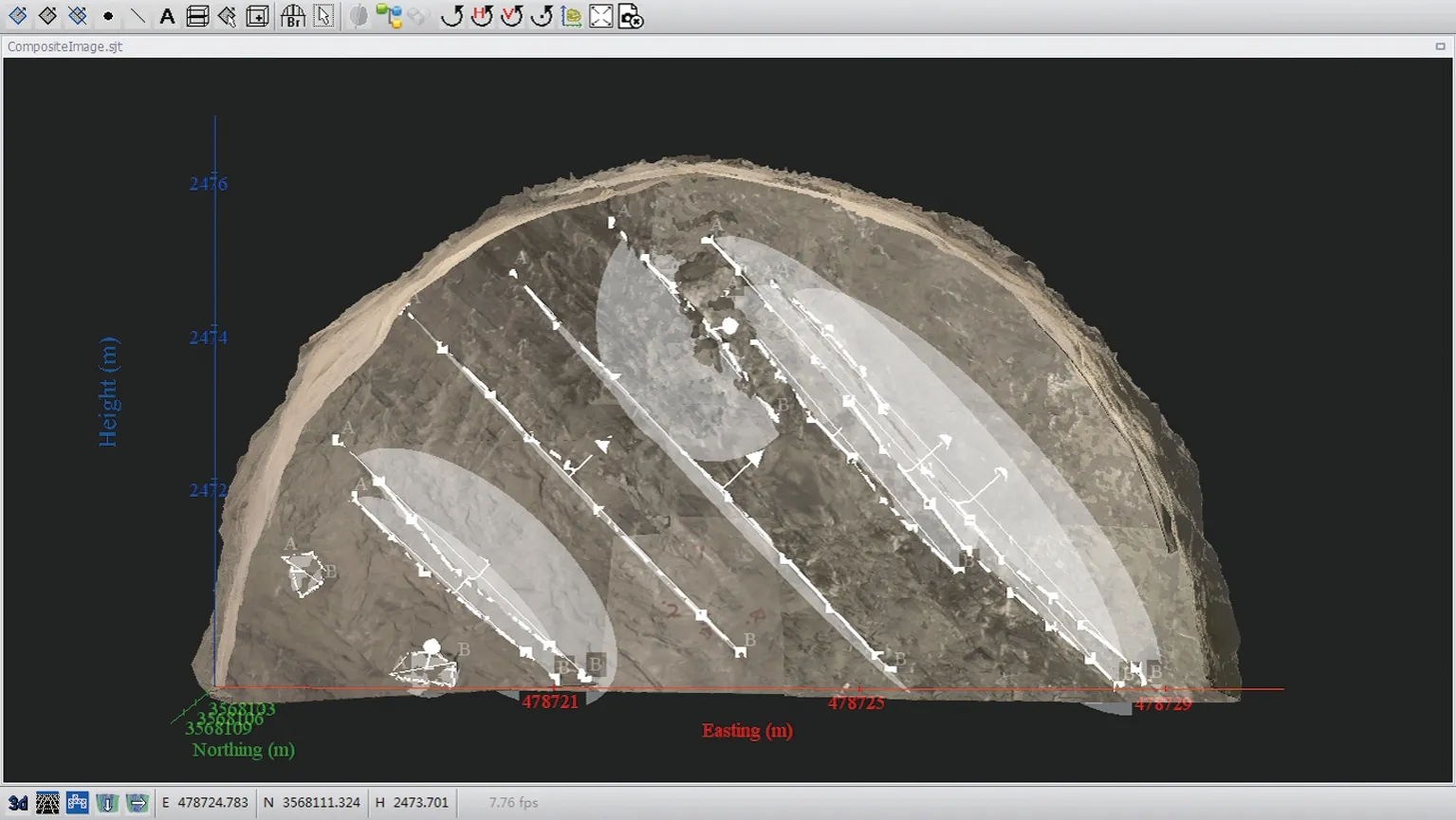
图12 岩体结构面划分
Fig. 12 Division of rock mass discontinuities

图13 产状信息提取

图14 不稳定结构指示

图15 岩性识别

图16 D1K191+938里程掌子面超欠挖对比
Fig. 16 Comparison between overbreak and underbreak of tunnel face at D1K191+938 section
2)利用稀疏光束法平差方法求解系列影像间的相对位置与姿态,并综合利用核线几何约束、半全局匹配、多视最小二乘匹配等策略实现岩体影像的密集匹配,最终提取出岩体结构的三维信息。
3)结合实拍的金瓶岩隧道掌子面系列影像,重建该掌子面的三维信息,较好地验证了本文所提方法的作业效率,能够方便地实现工程岩体结构面完全非接触式测量。
5.2 讨论
1)如何从岩体结构三维信息中自动提取裂隙、角、边等形状特征,得到岩体的相关属性或者物理参量,从而进行岩性识别、稳定性分析是后续研究的重点。
2)本文的方法是根据岩体图像像素匹配结果生成三维点云,重构精度与图像解析度及成像清晰程度直接相关; 而如何在光照条件较差、空气中粉尘含量较高的环境中获取清晰的岩体影像也是一个值得关注的问题。
[1] 张倬元, 王士天, 王兰生, 等. 工程地质分析原理[M]. 2版. 北京: 地质出版社, 1994. ZHANG Zhuoyuan, WANG Shitian, WANG Lansheng, et al. Engineering geological analysis principle[M]. 2nd ed. Beijing: Geological Publishing House, 1994.
[2] 徐青, 吴寿龙, 朱述龙, 等. 近代摄影测量[M]. 北京: 解放军出版社, 2000. XU Qing, WU Shoulong, ZHU Shulong, et al. Modern photogrammetry[M]. Beijing: PLA Press, 2000.
[3] 王栋. 嵌入式数字近景摄影测量系统的研究[D]. 郑州: 解放军信息工程大学, 2012. WANG Dong. Study of the embedded digital close-range photogrammetry system[D]. Zhengzhou: PLA Information Engineering University, 2012.
[4] 张文. 基于三维激光扫描技术的岩体结构信息化处理方法及工程应用[D]. 成都: 成都理工大学, 2011. ZHANG Wen. Information processing method on rock mass structure and its application in geological engineering based on three-dimensional laser scanning technique[D]. Chengdu: Chengdu University of Technology, 2011.
[5] 叶英, 穆千祥, 张成平. 隧道施工多元信息预警与安全管理系统研究[J]. 岩石力学与工程学报, 2009, 28(5): 900-907. YE Ying,MU Qianxiang,ZHANG Chengping.Tunnel construction multivariate information forewarning and safety management system research[J].Chinese Journal of Rock Mechanics and Engineering, 2009, 28(5): 900-907.
[6] ROBERTS G, POROPAT G V. High wall joint mapping in 3D at the Moura Mine using Sirojoint[R].Pullenvale: CSIRO Exploration and Mining Technology Court, 2003.
[7]HANEBERG W C. Using close range terrestrial digital photogrammetry for 3-D rock slope modeling and discontinuity mapping in the United States[J]. Bull Eng Geol Environ, 2008, 67: 457-469.
[8]WANG Shuhong,NI Pengpeng.Application of block theory modeling on spatial block topological identification to rock slope stability analysis[J]. International Journal of Computational Methods, 2014, 11(1): 903-914.
[9]NI Pengpeng, WANG Shuhong, WANG Cungen, et al. Estimation of REV size for fractured rock mass based on damage coefficient [J]. Rock Mechanics and Rock Engineering, 2016(11): 44-67.
[10] 王述红, 杨勇, 王洋, 等. 基于数字摄像测量的开挖空间模型及不稳块体的快速识别[J]. 岩石力学与工程学报, 2010, 29(增刊1): 3432-3438. WANG Shuhong, YANG Yong, WANG Yang, et al. Spatial modeling and quick identification of unstable rock blocks based on a digital photogrammetry[J]. Chinese Journal of Rock Mechanics and Engineering, 2010, 29(S1): 3432-3438.
[11] 王述红, 张靖杰, 李云龙, 等. 工程岩体开挖过程全空间块体搜索及其系统研制[J]. 东北大学学报(自然科学版), 2010, 31(7): 1026-1029. WANG Shuhong, ZHANG Jingjie, LI Yunlong, et al. Quickly spatial identification process of blocks during rock excavation and its system modeling[J]. Journal of Northeastern University (Natural Science), 2010, 31(7): 1026-1029.
[12] 王凤艳, 陈剑平, 杨国东, 等. 基于数字近景摄影测量的岩体结构面几何信息解算模型[J]. 吉林大学学报(地球科学版), 2012, 42(6): 1839-1846. WANG Fengyan, CHEN Jianping, YANG Guodong, et al. Solution models of geometrical information of rock mass discontinuities based on digital close range photogrammetry[J]. Journal of Jilin University(Earth Science Edition), 2012, 42(6): 1839-1846.
[13] 王凤艳, 陈剑平, 付学慧, 等. 基于VirtuoZo 的岩体结构面几何信息获取研究[J]. 岩石力学与工程学报, 2008, 27(1): 169-175. WANG Fengyan, CHEN Jianping, FU Xuehui, et al. Study of geometrical information of obtaining rock mass discontinuities based on VirtuoZo [J]. Chinese Journal of Rock Mechanics and Engineering, 2008, 27(1): 169-175.
[14]DAVID G Lowe. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91-110.
[15] HERBERT Bay, TINNE Tuytelaars, LUC Van Gool. Surf: Speeded up robust features[C]//European Conference on Computer Vision. Graz: [s.n.], 2006.
[16] MOREL J M, YU G S. ASIFT: A new framework for fully affine invariant image comparison[J]. SIAM Journal on Imaging Sciences, 2009, 2(2): 438-469.
[17] 何周灿, 王庆, 杨恒. 图像特征匹配中一种高效的鲁棒估计算法[J]. 中国图象图形学报, 2011, 16(1): 84-89. HE Zhoucan, WANG Qing, YANG Heng. An efficient robust estimation algorithm for image feature matching[J]. Journal of Image and Graphics, 2011,16(1): 84-89.
[18] 郭红玉, 王鉴. 一种基于RANSAC基本矩阵估计的图像匹配方法[J]. 红外, 2008, 29(2): 5-8. GUO Hongyu, WANG Jian. An image matching method based on RANSAC algorithm for estimation of fundamental matrix[J]. Infrared, 2008, 29(2): 5-8.
[19] TRIGGS B,MCLAUCHLAN P, HARTLEY R, et al. Bundle adjustment: A modern synthesis[J]. Lecture Notes in Computer Science, 2000, 1883: 298-372.
[20] LOURAKIS M I A, ARGYROS A A. SBA: A software package for generic sparse bundle adjustment[J]. ACM Transactions on Mathematical Software, 2009, 36(1): 1-30.
[21] NISTER D. An efficient solution to the five-point relative pose problem[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2004, 26(6): 756-770.
[22] HARTLEY R, ZISSERMAN A. Multiple view geometry in computer vision[M]. Cambridge: Cambridge University Press, 2000.
[23]MARC Pollefeys, LUC Van Gool, Maarten Vergauwen, et al. Visual modeling with a hand-held camera[J]. International Journal of Computer Vision, 2004, 59(3): 207-232.
[24] 侯一凡, 王栋, 邢帅, 等. 基于立体视觉的在线实时测量系统设计与实现[J]. 计算机应用, 2016, 36(5): 1450-1454. HOU Yifan, WANG Dong, XING Shuai, et al. Design and implementation of online real-time mapping system based on image stereo vision[J]. Journal of Computer Applications, 2016, 36(5): 1450-1454.
[25]HIRSCHMULLER H. Stereo processing by semi-global matching and mutual information[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2008, 30(2): 328-341.
Research on 3D Reconstruction Technology for Rock Mass Structure Based on ASIFT Algorithm and RANSAC Algorithm
XIONG Ziming1, 2, DONG Xin1, WANG Mingyang1, 2, ZHANG Qinghua1, 2, MA Chao1
(1.StateKeyLaboratoryforDisasterPrevention&MitigationofExplosion&Impact,PLAUniversityofScienceandTechnology,Nanjing210007,Jiangsu,China; 2.SchoolofMechanicalEngineering,NanjingUniversityofScienceandTechnology,Nanjing210094,Jiangsu,China)
The acquisition and accuracy of information of rock mass discontinuities structural plane are the key to the safe tunnel excavation. A new 3D reconstruction method for rock mass structure based on ASIFT algorithm and RANSAC algorithm is proposed so as to improve the efficiency of 3D reconstruction algorithm. The ordinary digital camera is used to gain a series of digital images of real rock mass structure quickly. And then, according to the characteristics, i. e. large variation of rock mass image scale and angle of inclination, and poverty of texture of rock mass, the ASIFT matching algorithm and RANSAC mismatching point elimination algorithm are adopted to guarantee the efficiency and reliability of the sparse matching between stereo images. Finally, the bundle adjustment method in conjunction with adjustment method is used to solve the relative position and attitude between image sequences. Meanwhile, the methods of epipolar line geometric constraint, local-full matching and least square matching are comprehensively adopted to achieve the intensive matching of rock mass images; and then 3D information of rock mass structure is finally extracted. The engineering practice shows that the non-contact measurement of rock mass structural planes can be completed conveniently by the above-mentioned method; meanwhile, the efficiency can be improved and the risk of survey crew exposing under rock mass can be avoided.
rock mass structure; 3D reconstruction; non-contact measurement; image of tunnel face; ASIFT algorithm; RANSAC algorithm
2017-01-03;
2017-06-15
国家重点基础研究发展规划“973”项目(2013CB036005); 博士后基金(2017M611816); 国家自然科学基金青年项目(51608529)
熊自明(1980—),男,江西南昌人,2013年毕业于解放军信息工程大学,作战环境学专业,博士,讲师,现主要从事不良地质条件下工程安全风险评估方面的教学与研究工作。E-mail: xzm992311@163.com。
10.3973/j.issn.1672-741X.2017.07.005
U 45
A
1672-741X(2017)07-0808-08
猜你喜欢
西江月(2021年3期)2021-12-21
铁道科学与工程学报(2020年10期)2020-11-19
软件(2020年3期)2020-04-20
铁道建筑(2019年7期)2019-08-08
福建交通科技(2019年2期)2019-05-18
中国铁道科学(2019年1期)2019-02-18
星海音乐学院学报(2017年3期)2017-08-24
连环画报(2016年10期)2016-12-16
光学精密工程(2016年6期)2016-11-07
腹腔镜外科杂志(2016年12期)2016-06-01