
介电弹性体驱动器柔性电极技术发展动态
2017-07-24 16:45曹建波任钰雪鄂世举夏文俊
电子元件与材料 2017年7期
曹建波,任钰雪,鄂世举,夏文俊,周 武
(浙江师范大学 工学院,浙江 金华 321000)
介电弹性体驱动器柔性电极技术发展动态
曹建波,任钰雪,鄂世举,夏文俊,周 武
(浙江师范大学 工学院,浙江 金华 321000)
对介电弹性体柔性电极相关研究进行了总结和分析。柔性电极是介电弹性体发电或驱动材料的重要组成部分,其性能直接影响介电弹性体发电机的发电效率以及驱动器的驱动性能。目前,对柔性电极的研究处于起步阶段。本文基于介电弹性体材料的不同用途,分析了碳基电极、碳纳米管电极等几种典型的柔性电极材料的性能、制备工艺及方法。并针对其应用条件的不同,分析了电极材料的应用领域。经过研究分析发现,柔性电极材料需要具备柔性大、导电性高这两点特性,但是目前柔性电极在柔性与导电性上不能兼具,存在贴合度不足、导电性差等问题,需要对柔性电极的材料以及制备工艺进行更加深入的研究。
介电弹性体;柔性电极;综述;发电机;驱动器;形变率
介电弹性体(Dielectric Elastomer,DE)是一种具有电活性的弹性体材料,能够在电场作用下改变形状,将电能转换为机械能;同样,它的逆过程也可以用于发电,将机械能转换为电能。早在20世纪90年代,很多国内外学者对其变形特性展开了研究,其中美国斯坦福大学是最早对介电弹性体材料进行研究的机构,斯坦福的Pelrine等[1]研制出了应变超过100%的介电弹性体材料,这种材料在《Science》上公布之后,引起了驱动领域学者的关注。
介电弹性体驱动器(Dielectric Elastomer Actuator,DEA)的结构类似于三明治,在DE薄膜的上下两表面涂覆一层柔性电极材料,例如碳油、石墨粉、碳纳米管等。这类电极材料要具备两种特性,一是要适应DEA的电致变形的特性,需要具备可伸缩性和低刚度的性能;二是DEA的本质是电能转换为机械能,电极材料的内阻会造成巨大的能量损耗[2],为提高能量转换效率,电极材料要有高导电性和低电阻的特性。
DE材料具有大的比能量、最大形变可达到380%等突出特点,国外学者认为这种材料也适用于低频、大变形的发电场合,并对其逆过程进行研究,设计制造介电弹性体发电机(Dielectric Elastomer Generator,DEG)。介电弹性体的应用研究主要在驱动与发电领域,也有学者将其应用于柔性电子、传感器、生物医学等方面[3-9]。
柔性电极是DEG材料必不可少的组成部分,电极材料研究的滞后严重影响了DEG材料在驱动器与发电机中的应用。因此,本文针对现存的主要电极材料:碳基材料、金属薄膜材料、碳纳米管、透明离子导体材料、互穿聚合物网络等进行对比研究,将其制备方法、性能、优缺点进行总结分析,希望找出最具有应用前景的电极材料,进行更深入的研究。
1 DE工作原理
两表面涂覆柔性电极的介电弹性体驱动器类似于一个平行板电容器,其工作原理是当在DE上下表面加电场后,两电极会加载电荷,加载的电荷相互吸引压缩介电弹性体,产生麦克斯韦应力,使其在厚度与平面方向发生变形,将电能转换为机械能[10];去掉电压,DE恢复到原来的形状。利用DE电致变形的特性,能够制作厚度位移驱动器与平面位移驱动器。
DEG的发电原理是驱动原理的逆过程,将机械能转化为电能。介电弹性体发电单元可看作一个可变电容器,在弹性体发电单元上下表面加电压,电极加载电荷。当外力拉伸 DE膜时,面积增大,由于体积不变,DE膜厚度变小,电容增大,两端电压减少;移除外力后,由于DE材料内部的弹性应力,使得 DE材料恢复到之前的状态,面积减小,厚度变大,电容减小,两端电压增大,外部施加外力的机械能转换为电能。且由发电能量公式可知:DEG的发电能量与 DE的形变面积正相关。发电能量的具体推导过程如下[11]:
电容C为:

式中:ε是介电常数;ε0是自由空间介电常数,且ε0=8.85×10-12F/m;A为介电弹性体面积;d为介电弹性体的厚度。
其体积B为:

面积A与厚度d随材料的变形而变化。将式(1)代入式(2),得:

则电压U可表示为:

式中:Q为总体电荷量。
则发电机能量E可表示为:
式中:Ci为弹性体在伸展时的总电容量;Cf是收缩时的总电容量;Emax是通过弹性体的最大电场;η是电能转换效率。
电极作为介电弹性体表面的核心部分,它需要具有两个基本特性:一是必须具有导电性,二是柔性,不同应用场合,对电极柔性的特性要求不同,DEA的电极拉伸率要求为10%~100%即可,DEG要求电极的拉伸率要达到100%以上。
2 常见电极的制备方法与性能分析
2.1 碳基电极
碳基电极是用碳黑作为基体进行制备的电极材料,根据制备方法的不同,可分为油脂类电极、固体粉末类电极、导电橡胶电极三类。油脂类电极是将炭黑材料与一些粘稠度高的油脂物体混合制作的油脂状电极;固体粉末类电极是将碳粉直接喷洒在DE薄膜上制作的电极;导电橡胶是指将炭黑与橡胶混合制成的电极。
(1)油脂类电极
油脂类电极[12]是将炭黑与聚二甲硅氧烷(Polydimethylsiloxane,PDMS)进行混合,或是将碳粉悬浮在硅胶硅油等润滑脂上,形成油脂状的电极。油脂类电极柔性大,伸缩性好,不会阻碍DE材料的形变。但是油脂类电极有两个缺点:一是油脂与碳粉颗粒不容易附着在介电弹性体膜上,在反复拉伸过程中容易脱离;二是使用时间长时,油脂类电极会失效,这是由于油脂物质会干涸或者消融[13]。油脂是绝缘物质,与碳粉混合后,大大降低了电极的导电性,其电阻率高达为50×103Ω/cm,Caroi等[14]使用这类电极制作的驱动器在电场强度为34 V/µm的条件下也仅能达到4.3%的形变率,使用的DE膜材料是丙烯酸弹性体材料(3M公司,VHB F9460PC),其薄膜厚度为50 μm,预应变为19%,预应变后薄膜厚度为46 μm。
(2)固体粉末类电极
固体粉末类主要是用炭黑与石墨粉采用涂刷或者石墨喷涂的方法直接附着在介电弹性体上。这种方法制备的电极其优点是不会干涸。
Pelrine等[15]用石墨喷涂的方式将碳粉喷洒在介电弹性体上,制作的DEA在300V电压下达到20%的形变率,其 DE膜材料使用的是硅树脂弹性体材料(Dow Corning公司,HS III),厚度为1 μm,预应变为 32%。具体制备过程是将碳粉溶解于以水为基体的溶液中,放置在一个压力容器中,通过喷雾的方式将碳粉溶液喷洒在介电弹性体上,溶液蒸发后,石墨粉附着在介电弹性体上。这种方法的优点是电极涂覆更为均匀。
Schlaak等[16]设计了一种由电脑控制自动叠层的多层DEA,也是采用石墨喷涂方法制作电极,将石墨粉装在一个压力容器中,经由容器喷嘴喷洒在介电弹性体上,如图1所示。另外,Schlaak等还将涂刷与石墨喷涂这两种制备碳粉电极的方法进行了对比,发现涂刷方式制备的碳粉电极比石墨喷涂方式制备的碳粉电极的导电率要更高,如图2所示,涂刷的碳粉电极电阻率明显低于喷涂的电阻率,但是涂刷的碳粉电极不易操作。对比实验中所使用的DE膜材料为硅树脂弹性体材料(Wacker公司,Elastosil P7670),其厚度为25 μm,无预应变。

图1 石墨喷涂Fig.1 Sprayed graphite
(3)橡胶电极
Kinoshita等[17]将科琴黑(Ketjen Black,KB)与橡胶混合起来制成柔性电极,其中KB是一种由特殊工艺制作而成的炭黑,比普通炭黑的导电性好。橡胶电极的制备方法是将KB利用超声波溶解在庚烷溶剂中,形成KB悬浮液,再将KB悬浮液与橡胶溶液进行混合,利用电磁搅拌器搅拌均匀之后制作完成。橡胶电极制作的 DEA在预应变为 200%以及电压为4 kV的条件下达到38%的形变率,如图3所示。
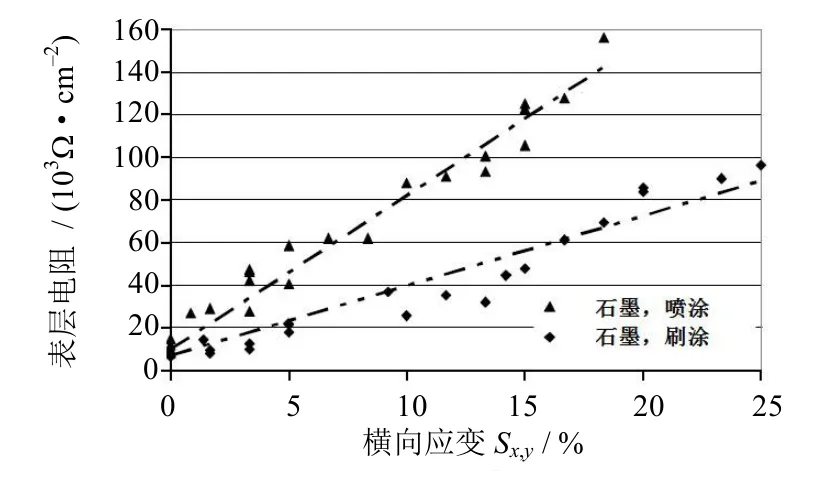
图2 喷涂与刷涂电阻率对比Fig.2 Comparison of sheet resistance of sprayed and brushed graphite electrodes

图3 导电橡胶DEA在4 kV下的变形Fig.3 Deformation of conductive rubber DEA with 4 kV
碳基电极是目前在介电弹性体上应用最广泛的电极材料,尽管它的拉伸率好,但是导电性不高,并且也无法机械化生产。另外,涂覆工艺也会对电极材料的性能产生影响,因此目前对碳基电极的研究主要集中在涂覆工艺与机械自动化生产上。
2.2 碳纳米管
碳纳米管具有较高的机械强度、较小的体积、良好的导电性等特点,使它能够应用在高强度复合材料、微机械、信息存储、纳米电子器件、平板场致发射显示器以及碳纳米管微操作等方面[18]。碳纳米管颗粒小且具有高导电性,使它能够很好地渗入DE膜内,这使得碳纳米管作为柔性电极材料在DE上广泛应用。
张冬至等[19]用静电自组装的方法制作碳纳米管电极,并与介电弹性体材料结合制成可穿戴发电机,其发电结构的厚度为28 μm。手套发电机如图4所示,手指弯曲90○能够输出最大电压为3.7 V。鞋垫发电机将DEG作为鞋垫放置于鞋底时,踏步压缩介电弹性体发电机能够输出最大电压为1 V,该膜相对介电常数为12,电容值为1.37 nF。

图4 手套发电机Fig.4 Glove generator
Yuan等[20]验证了碳纳米管电极的容错性。如图5所示,(a)、(b)为碳粉电极的容错性实验,(c)、(d)为碳纳米管电极的容错性实验,发现使用碳纳米管电极的DEA某一处被击穿后,不影响DEA的后续使用,而使用碳粉电极的DEA是不具有这一特性的,在实验中所使用的膜材料为丙烯酸弹性体(3M公司,VHB 4905)。这种具有容错性的碳纳米管电极是使用声波降解将碳纳米管粉末溶解于水溶液中,再用气枪喷洒在介电弹性体上制备而成的。

图5 碳粉电极和碳纳米管电极容错性实验Fig.5 Fault-tolerance experiment of carbon nanotube electrode and carbon electrode
碳纳米管电极相对于碳基电极来说,有较低的拉伸率,另外还有容错性这一特点,是一种发展前景较好的电极材料。目前,碳纳米管主要还是集中在碳纳米管电极的制备工艺研究上。
2.3 金属薄膜
应用在介电弹性体上的柔性电极需要具备拉伸率大、导电性强等特点。对于金属来说,具有很强的导电性,但是刚度大,为了解决这一问题,Pelrine等[15]首先提出将金属镀到介电弹性体膜上的电极制作方法。金属镀膜方法主要有高温溅射与化学镀两种。
化学镀是一种新型的金属处理技术,依据氧化还原的化学原理,利用强还原剂将溶液中的金属离子还原沉积在物体表面形成镀层。
Low等[21]基于化学镀技术制作了一种褶皱金属银薄膜电极,在预拉伸2.5倍、电压1.8 kV的条件下达到 128%的形变率,其中使用的 DE膜材料为VHB F9473PC,膜材料厚度为250 μm,银电极厚度为150 nm±30 nm。这种基于化学镀的褶皱银薄膜电极的制备方法是:首先将DE拉伸2.5倍,然后利用强还原剂与催化剂将溶液中的银离子置换在 DE膜表面,镀膜之后 DE恢复为无压力状态,银薄膜受到挤压成为褶皱银薄膜电极,如图6所示,是压缩应变为40%的褶皱银薄膜。

图6 预拉伸2.5倍的DEA与褶皱银薄膜Fig.6 Prestretching 2.5 times of DEA with crumpled silver films
高温溅射是一种在真空中利用高温将金属离子沉积在物体表面的金属镀层技术。Low等[22]利用这种金属镀层技术制作了银薄膜电极,并且将高温溅射与化学镀这两种镀膜方式进行了对比,如图7所示,使用的膜材料也是VHB F9473PC,其厚度也如上所示。化学镀制作的金属薄膜电极性能远远高于高温溅射制作的金属薄膜电极。与高温溅射镀膜相比,化学镀膜方法操作简单、不需要真空与高温、镀膜的导电性更好。因此,化学镀的镀膜方式更加具有优势。

图7 不同镀膜方式性能对比Fig.7 Performance comparison of different coating film methods
金属薄膜电极虽然具有高导电性,但是不能完全满足 DE材料的大变形要求,在拉伸率或者形变率大的时候,会发生破裂。因此,只适用于驱动器这种形变较小的器件,发电机这种需要 DE材料大变形的器件是不适用的。目前,金属薄膜电极的研究还是集中在离子附着技术研究,即怎样更好地使金属离子附着在 DE膜上,达到导电性与拉伸性共同兼容的目的。
2.4 透明离子导体
离子导体是一种通过大量的可动离子的移动来产生电流的离子固体。美国哈佛大学Keplinger等[23]宣布在实验室制造出了透明可拉伸的离子导体,能够在一万赫兹以上频率和一万伏以上电压下工作,其拉伸率在五倍以上。这种透明离子导体是由盐水与高分子聚合物相结合制成的水凝胶。水凝胶[24]是一种高分子网络,能够将水分子包含在网状内部,如图8所示,常见的有果冻、凉粉等,但是这一类水凝胶力学性能较差。Keplinger等所研制出的透明离子导体具有高透明度、大拉伸率和稳定电导率等特性。但是这种离子导体高电压下容易造成电化学反应,Keplinger等通过在透明离子导体之间加入一层介电弹性体,形成特有的三明治结构解决了这个问题,并基于此结构设计了柔性扬声器,这种柔性扬声器能在10 kV的电压下达到167%的形变率,其使用的DE膜材料为VHB 4910(3M公司),厚度为1 mm,使用的水凝胶电极厚度为100 μm。
Chen等[25]使用聚丙烯酰胺水凝胶制作了如图9所示的等双轴驱动器,能在4 kV的电压下达到140%的形变率,并且还发现离子导体的厚度会限制DEA的应变,Chen等用厚度为0.3,0.5,1.0 mm的离子导体作为电极材料进行DEA性能的比较,DEA在离子导体为0.3 mm厚度时达到了最大变形,实验使用的DE膜为VHB 4910。

图8 水凝胶Fig.8 Hydrogel

图9 等双轴驱动器Fig.9 Equal-biaxially DEA
Yang等[26]制备了一种含有氯化锂的合成聚丙烯酰胺水凝胶,将这种合成凝胶作为 DE材料的电极,用做导线,可以点亮LED,使用时,需要在上下两层都加入铜片,如图10所示。使用DE膜(3M公司,VHB4905)以及这种材料做成的 DE导线在面积为 2.0×10-4m2、厚度为 5.0×10-4m时,有 16.8 pF的电容。

图10 DE导线Fig.10 DE conductor
Yang等[27]还利用这种电极的透明性,制作了一个发光装置,主要是将电致发光的硫化锌粉末铺在DE薄膜(3M公司,VHB 4910)中,在VHB 4910的外层用含氯化锂的水凝胶作为柔性电极。如图11所示,这种柔性发光器件的面积应变能够到达1500%。尽管Yang等没有将其用于主流的驱动器或者发电机装置上,但是由于其优异的形变特性,未来的应用前景较好。

图11 DE发光器件Fig.11 DE luminescent device
2.5 互穿聚合物网络
Ha等[29-30]研制了一种基于互穿聚合物网络的碳油脂电极,制作的DEA能在预拉伸为275%以及电场强度为300 MV/m的条件下达到233%的形变率,其DEA的厚度为40 mm,使用DE膜材料为VHB 4910。互穿聚合物网络[28](Interpenetrating Polymer Network,IPN)是两种或两种以上的共混聚合物,分子链相互贯穿,并至少有一种聚合物分子链以化学键的方式交链而形成的网络结构。这种基于 IPN的炭黑电极的优点是 DE膜被拉伸后,撤销外力,DE膜不会回缩。这样在DE膜需要预拉伸的情况下,是不需要支撑机构的。电极的制备方法是:将 1,6-己二醇二丙烯酸酯作为交联添加剂,过氧化苯甲酰作为引发剂一起加入真空炉中加热至85℃制成互传聚合物网络,然后再在DE膜表面涂抹碳油脂电极。图 12所示为使用基于 IPN的碳油脂电极所制作的DEA。
瑞士联邦材料测试与开发试验室[31]设计了一种堆叠式的驱动器,将IPN与科琴黑结合制成电极,制备方法是将DE材料用IPN处理后,将科琴黑石墨粉电极涂覆到介电弹性体上以形成电极。使用这种电极材料制作的堆叠式驱动器的性能在无预拉伸及电压为4.2 kV的条件下达到30%的形变率,其DEA厚度为18.3 mm,使用的DE膜材料是VHB 4910。

图12 DEAFig.12 DEA
于江成[32]将 IPN与碳纳米管结合制成了基于IPN的碳纳米管电极,并用这种电极制作了一种堆叠式的DEA。该DEA在无预拉伸以及电压为4 kV的条件下,能达到18.2%的形变率,其DEA厚度为5.5 mm,并且选用的DE膜材料是VHB 4910。电极制备方法为:将水和异丙醇按1:5的体积比混合成的溶液,将碳纳米管粉末加入溶剂中制成碳纳米管溶液。以三羟甲基丙烷三甲基丙烯酸酯作为添加剂、过氧化苯甲酰作为引发剂加入85 ℃的真空炉中,制成IPN,再将IPN加入碳纳米管溶液中,利用超声探头搅拌均匀,制成基于IPN的碳纳米管电极。
2.6 不同电极比较分析
上述五种典型的电极材料,都具有不同的特性、各自都有着不同的优缺点,为此对这五种电极材料做了对比分析,其总结对比如表1所示,其应用场合是依据各种材料在文献中介绍的应用。
2.7 电极材料应用分析
电极材料由于自身特性的不同,其应用场合也有所分别。针对其各个应用场合所需特性的不同,对各种电极材料做了应用分析,其分析结果如下。
首先,应用在驱动器领域,主要是被作为人工肌肉,传统的驱动器能量密度小、体积大、输出力小,无法满足生物肌肉的柔韧性以及能量密度大的特点,因此应用在驱动器方面的 DE驱动单元应该有着体积小、能量密度大、柔韧性大等特点。
其次,应用在发电领域,由上文可知,发电机的能量是与其面积的形变量直接相关的,因此,发电机要求 DE材料具有高的能量密度与大的变形量等特点。然而,碳基电极中固体粉末类与金属薄膜电极在拉伸倍数过高的条件下容易开裂,是不适用于发电机的。
最后,在一些其他的应用领域中,对其要求也各有不同,柔性电子是利用了 DE材料的柔韧性,只要 DE单元是柔性的就能够用作柔性电子;发光器件则需要 DE单元是透明的,其中只有透明离子导体适用于发光器件。

表1 五种电极材料对比Tab.1 Comparison of five kinds of electrode materials
3 结语
介电弹性体作为一种新型的功能材料,在驱动、传感、发电等方面都有广阔应用前景,但是柔性电极材料研究的滞后限制了介电弹性体的进一步研究与应用。因此,本文专门对介电弹性体柔性电极的相关技术进行了研究分析,总结分析如下。
(1)电极材料中,碳基材料是目前研究中使用最为广泛的,利用介电弹性体制作的电子器件大多使用的碳基材料,主要分为固体粉末类电极、油脂类电极以及导电橡胶三类,各有优缺点。固体粉末类具有高导电性,但是在拉伸过大的情况下,容易开裂。油脂类与导电橡胶具有大的灵活度,能够适应介电弹性体的大变形,但导电性差。
(2)碳纳米管近几年才被用于柔性电极材料,制备工艺还不够成熟,但优势明显,应继续研究,提高其性能。
(3)金属薄膜电极具有高导电性,但是与介电弹性体膜的贴合度不够,只适用于小变形量的场合,不适用于大变形场合,制作出柔性与导电性兼具的金属电极材料是研究的努力方向。
(4)透明离子导体电极相对比其他电极来说,透明度是其独有特点,使 DE材料可用于诸如透明发光器件等特殊场合。
(5)IPN是一种新型聚合物,导电性高,还需继续相关研究。
电极材料的性能是影响 DE器件性能的关键,但是 DE材料的厚度、预应变以及电极材料的涂覆面积等都会对电极材料的性能产生影响,针对以上电极材料,其性能好坏尚无统一的评价标准,应尽快建立柔性电极材料及性能数据库是推动 DE材料应用的关键问题之一。
参考文献:
[1] PELRINE R, KORNBLUH R, PEI Q, et al. High-speed electrically actuated elastomers with strain greater than 100% [J]. Science, 2000, 287(5454): 836-839.
[2] LO H C, CALIUS E, ANDERSON I. Understanding efficiency limits of dielectric elastomer driver circuitry[C]//SPIE Smart Structures and Materials+Nondestructive Evaluation and Health Monitoring.International Society for Optics and Photonics. NY, USA:IEEE, 2013: 86870E-86870E-6.
[3] KOFOD G. Dielectric elastomer actuators [J]. J Phys D Appl Phys, 2008, 41(2): 1-11.
[4] HUANG J, SHIAN S, SUO Z, et al. Maximizing the energy density of dielectric elastomer generators using equi-biaxial loading [J]. Adv Funct Mater, 2013, 23(40): 5056-5061.
[5] ANDERSON I A, GISBY T A, MCKAY T G, et al.Multi-function dielectric elastomer artificial muscles for soft and smart machines [J]. J Appl Phys, 2012, 112(4):041101.
[6] NI N, WANG Y, LIU F, et al. A New dielectric elastomer sensor based on cantilever beam structure with constant strength [J]. Appl Mech Mater, 2014, 664: 279-283.
[7] MCKAY T, O’BRIEN B, CALIUS E, et al. An integrated,self-priming dielectric elastomer generator [J]. Appl Phys Lett, 2010, 97(6): 062911.
[8] KOH A S J, ZHAO X, SUO Z. Maximal energy that can be converted by a dielectric elastomer generator [J]. Appl Phys Lett, 2009, 94(26): 262902.
[9] KORNBLUH R D, PEI Q, ROSENTHAL M A. Dielectric elastomer artificial muscle actuators: toward biomimetic motion [C]//SPIE's 9th Annual International Symposium on Smart Structures and Mater. International Society for Optics and Photonics. NY, USA: IEEE, 2002: 126-137.
[10] ZHAO X, SUO Z. Theory of dielectric elastomers capable of giant deformation of actuation [J]. Phys Rev Lett , 2010,104(17): 39-87.
[11] 鄂世举, 朱喜林, 高春甫. 介电弹性体发电的基本原理及在分布式发电中的应用 [J]. 现代制造工程, 2009 (9):141-145.
[12] TAKAMATSU K, TUCHITANI S, KIKUCHI K.Formation of flexible for dielectric elastoer actuator[C]//Proc. JSME Kansai. NY, USA: IEEE, 2010: 9-15.
[13] ROSSET S, SHEA H R. Flexible and stretchable electrodes for dielectric elastomer actuators [J]. Appl Phys A Mater Sci Proc, 2013, 110(2): 281-307.
[14] CAROI F, CHIARELLI P, MAZZOLDI A, et al.Electromechanical characterisation of dielectric elastomer planar actuators: comparative evaluation of different electrode materials and different counter loads [J]. Sens Actuators A Phys, 2003, 107(1): 85-95.
[15] PELRINE R E, KORNBLUH R D, JOSEPH J P.Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation [J]. Sens Actuators A Phys, 1998, 64(1): 77-85.
[16] SCHLAAK H F, JUNGMANN M, MATYSEK M, et al.Novel multilayer electrostatic solid state actuators with elastic dielectric [C]//Smart Structures and Mater.International Society for Optics and Photonics. NY, USA:IEEE, 2005: 121-133.
[17] KINOSHITA Y, TSUCHITANI S, KIKUCHI K.Development of flexible rubber electrode for dielectric elastomer actuator [C]//System Integration (SII), 2010 IEEE/SICE International Symposium on. NY, USA: IEEE,2010: 282-286.
[18] 朱长纯, 袁寿财, 李玉魁.碳纳米管及其应用 [J]. 微纳电子技术, 2002(8): 1-6.
[19] 张冬至, 童俊, 刘哲, 等. 基于电活性聚合物薄膜柔性器件的触觉传感特性 [J]. 光学精密工程, 2014, 22(8):2151-2158.
[20] YUAN W, HU L, YU Z, et al. Fault-tolerant dielectric elastomer actuators using single-walled carbon nanotube electrodes [J]. Adv Mater, 2008, 20(3): 621-625.
[21] LOW S H, LAU G K. Bi-axially crumpled silver thin-film electrodes for dielectric elastomer actuators [J]. Smart Mater Struct, 2014, 23(12): 125021.
[22] LOW S H, SHIAU L S, LAU G K. Large actuation and high dielectric strength in metallized dielectric elastomer actuators [J]. Appl Phys Lett, 2012, 100(18): 182901.
[23] KEPLINGER C, SUN J Y, FOO C C, et al. Stretchable,transparent, ionic conductors [J]. Science, 2013, 341(6149):984-987.
[24] ONO T, SUGIMOTO T, SHINKAI S, et al. Lipophilic polyelectrolyte gels as super-absorbent polymers for nonpolar organic solvents [J]. Nat Mater, 2007, 6(6):429-433.
[25] CHEN B, BAI Y, XIANG F, et al. Stretchable and transparent hydrogels as soft conductors for dielectric elastomer actuators [J]. J Polym Sci Part B Polym Phys,2014, 52(16): 1055-1060.
[26] YANG C H, CHEN B, LU J J, et al. Ionic cable [J].Extreme Mech Lett, 2015, 3: 59-65.
[27] YANG C H, CHEN B, ZHOU J, et al. Electroluminescence of giant stretchability [J]. Adv Mater, 2015, 28: 1-5.
[28] 张敏, 李碧婵, 陈良壁. 互穿网络聚合物水凝胶的制备及其吸附研究进展 [J]. 化工进展, 2015, 34(4):1043-1049.
[29] HA S, YUAN W, PEI Q, et al. Interpenetrating polymer networks for high-performance electroelastomer artificial muscles [J]. Adv Mater, 2006, 18(18): 887-891.
[30] HA S M, YUAN W, PEI Q, et al. Interpenetrating networks of elastomers exhibiting 300% electrically-induced area strain [J]. Smart Mater Struct, 2007, 16(2): S280-S287.
[31] KOVACS G. Contractive tension force stack actuator based on soft dielectric EAP [C]//SPIE Smart Structures and Mater Nondestructive Evaluation and Health Monitoring.International Society for Optics and Photonics. NY, USA:IEEE, 2009: 72870A-72870A-15.
[32] 于江成. 基于碳纳米管电极的介电弹性体堆叠型驱动器研究 [D]. 哈尔滨: 哈尔滨工业大学, 2014.
(编辑:陈渝生)
Development trends of flexible electrode technology for dielectric elastomer actuator
CAO Jianbo, REN Yuxue, E Shiju, XIA Wenjun, ZHOU Wu
(College of Engineering, Zhejiang Normal University, Jinhua 321000, Zhejiang Province, China)
The related researches about flexible electrode are summarized and analyzed. Flexible electrode is an important part of dielectric elastomer generator and actuator, and its performance directly affects the efficiency of dielectric elastomer generators and the driving performance of actuators. At present, the research of flexible electrode is in the initial stage. On the base of the different applications of the dielectric elastomer, the properties, preparation processes and methods of several typical materials such as carbon electrode, carbon nanotube electrode are analyzed. According to the different application conditions, the using field of the electrode materials is analyzed. It is found that flexible electrode materials require large flexibility and good electrical conductivity property. However, flexibility and conductivity of the electrode material is contradictory, at present. There are still several problems such as lack of fit, poor conductivity of the flexible electrode materials. Further study of the flexible electrode material and its preparation process are needed.
dielectric elastomers; flexible electrode; review; generator; actuator; deformation rate
10.14106/j.cnki.1001-2028.2017.07.002
TM201.4
A
1001-2028(2017)07-0009-08
2017-04-22
鄂世举
国家自然科学基金资助项目(No. 51377146; No. 51407162; No.51405450);浙江省自然科学基金资助项目(No. LY17E070001)
曹建波(1980-),男,山东潍坊人,副教授,主要从事介电弹性体发电技术的研究,E-mail: caojianbo2008@163.com;
任钰雪(1994-),女,山西晋城人,研究生,主要从事介电弹性体方面的研究,E-mail: 465034792@qq.com;
鄂世举(1970-),男,吉林长春人,教授,主要从事新型功能材料驱动与发电方面的研究,E-mail: 276828373@qq.com 。
时间:2017-06-29 10:22
http://kns.cnki.net/kcms/detail/51.1241.TN.20170629.1022.002.html
猜你喜欢
纺织科学研究(2021年7期)2021-08-14
水电与抽水蓄能(2021年2期)2021-05-14
弹性体(2021年6期)2021-02-14
商品与质量(2021年4期)2021-01-25
材料科学与工程学报(2016年1期)2017-01-15
河南冶金(2016年4期)2016-11-14
中国塑料(2016年3期)2016-06-15
浙江大学学报(工学版)(2016年9期)2016-06-05
电源技术(2015年5期)2015-08-22
橡胶工业(2015年3期)2015-07-29
