面向船舶动态监控的全球3D场景管理关键技术
2017-07-24 17:27:53李聪王胜正
上海海事大学学报 2017年1期
李聪, 王胜正
(上海海事大学 商船学院,上海 201306)
面向船舶动态监控的全球3D场景管理关键技术
李聪, 王胜正
(上海海事大学 商船学院,上海 201306)
为克服目前船舶动态监控系统的不足,提高监控平台的直观性,提出使用3D可视化技术实现船舶在3D海域空间的直观管理.根据电子海图数据自动建立3D海域地理环境;利用基于OsgEarth的全球场景管理平台无缝融合陆上地貌与3D海域地理环境;利用金字塔技术有效组织影像数据,构建全球3D船舶动态监控系统.通过实验定量和定性分析了该方法的有效性,为面向船舶动态监控的全球3D场景管理提供了新的思路.
船舶动态监控; 3D可视化; 场景管理; 数字地球
0 引 言
船舶动态监控是有效组织海上交通秩序,提供助航服务,保障海上交通安全的有效手段,因而船舶动态监控系统已成为海事主管部门和航运企业的重要信息化平台.目前的船舶动态监控系统都是利用2D电子海图显示船舶的通航地理环境的.[1-2]这些系统通过综合运用通信技术、数据处理技术、高精度差分GPS定位技术、电子海图显示技术和数据库管理技术,实现对在航船舶的动态跟踪、监控和管理,但在界面上显示的数据不够生动直观,需要人们通过训练学习建立大脑对事物的感知模型来理解其含义.如果理解有偏差,就有可能导致致命事故的发生.为此,FORD[3]提出三维电子海图显示与信息系统(3D Electronic Chart Display and Information System, 3D ECDIS)的构想,并通过研究发现3D ECDIS能够提高大脑建立感知模型的速度和理解其含义的速度.RAY等[4]通过参考三维地理信息系统(3D Geographic Information System, 3D GIS)[5]的构想,提出实现3D ECDIS的基本框架,但还无法用数据表达全球整体空间概念.1998年,GORE[6]提出“数字地球”的概念.2005年,以Google Earth为代表的数字地球系统开始利用互联网向全世界提供地球高分辨率的数字化图像呈现服务.十几年来,众多行业已经开展了大量的基于数字地球平台的应用研究[7-10],但将数字地球应用于船舶动态监控方面的研究仍处于空白状态.
在构建面向船舶动态监控的全球3D场景管理系统的过程中,需解决以下3个突出问题:如何构建海底地形;如何无缝融合陆上地貌与3D海域地理环境;如何高质量、快速绘制与显示地形表面的影像数据.
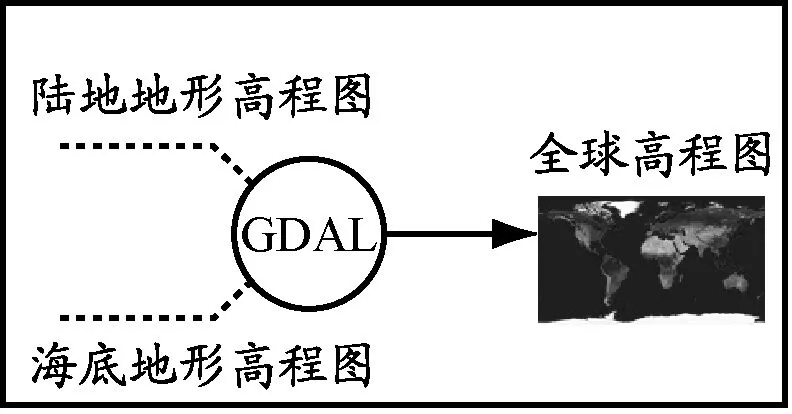
本文结合3D数字地球的属性特征与ECDIS水深点的特点,针对上述3个问题分别提出以下解决办法:基于电子海图数据自动建立3D海域地理环境,即先利用最小二乘法对散乱水深点进行曲面拟合,再利用高斯滤波法去除高程图上的噪声点,生成平滑的高程图;利用基于OsgEarth的全球场景管理平台无缝融合陆上地貌与3D海域地理环境,这里考虑到海底地形高程图与陆地地形高程图的数据源不同,提出根据两者岸线信息的一致性,利用地理空间数据抽象库(Geospatial Data Abstraction Library, GDAL)进行两者高程图之间的无缝拼接;利用金字塔技术组织影像数据,在保持影像显示效果的前提下,大量减少需加载的影像数据,从而实现地形表面影像数据的快速显示.
1 全球3D场景管理系统实现概述
图1为全球3D场景管理系统实现框架,主要包括4个阶段:(1)全球高程图的构建.先提取散乱水深点、等深线和岸线数据,利用最小二乘法和高斯滤波法生成平滑的海底地形高程图,再根据岸线信息的一致性,利用GDAL将海底地形高程图与陆地地形高程图进行拼接,最终生成具有海底地形和陆地地形的全球高程图.(2)地形显示速率的优化.针对全球地形表面影像数据量过大的问题,利用金字塔技术提高影像数据的显示速率.(3)全球地形的生成与渲染.先利用构建出的全球高程图通过OsgEarth 3D引擎生成陆地地形和海底地形,再将处理好的陆地地形影像和海底地形纹理映射到陆地地形和海底地形表面,并加载光照模型,对陆地地形和海底地形进行渲染,提升陆地地形和海底地形的真实感.(4)实现船舶动态监控.数字地球动态显示船舶在地球上的空间位置,通过拉近视点,以3D形式动态显示船舶周围的3D海域情况,并集成各种船舶监控功能,形成面向船舶动态监控的全球3D场景管理系统.
a)全球高程图的构建

b)地形显示速率的优化
c)全球地形的生成与渲染
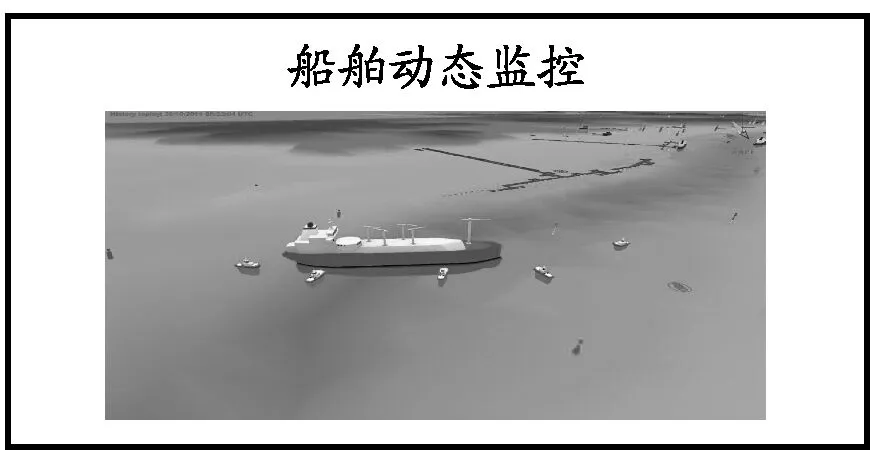
d)实现船舶动态监控
2 全球高程图的构建
2.1 海底地形高程图生成
数字高程模型(Digital Elevation Model, DEM)是描述地形表面的一个数字模型,通常用于3D地形建模,而基于三角形的建模方法[11-12]和基于格网的建模方法[13-15]是DEM建模最常用的方法.基于格网的建模方法一般适用于通过渐进采样方法和规则格网采样方法(特别是正方形格网采样方法)所获得的数据的建模.
在海底地形渲染过程中,生成的高程图的质量直接决定最终海底地形几何模型的拓扑结构,因此海底地形高程图的生成具有非常重要的作用,其计算的精度直接影响最终网格生成和绘制的效果.

a)初始

b)填充水深点后
c)剔除陆地上的点后
常用的曲面拟合和曲面插值算法有最小二乘法拟合、分形插值、Kriging插值和样条插值等.利用最小二乘法拟合高次曲面方程[16]的方法如下:
已知一组水深点(xk,yk,zk),k=1,2,…,K,求作m次多项式
(1)
使总误差
(2)

2.2 海底地形高程图优化
对因分块圈定范围过小从而矩形区域内的水深点数据过少所导致的高程图中出现凸点的问题可用图像平滑算法进行改进.平滑需使用滤波器,线性滤波器具有不改变图像相位信息的特点,其一般形式为

(3)
式中的h(s,t)为滤波器的核函数.不同的核函数代表不同的滤波器.
本文利用高斯滤波器去除凸点.高斯滤波器是最常用的滤波器,它将输入数组的每个像素点与高斯内核进行卷积,将卷积和当作输出像素值.高斯内核相当于对输出像素的邻域赋予不同的权值,输出像素点所在位置(对应高斯函数的均值位置)的权值最大.二维高斯滤波器的权函数为
(4)
幅度传输特性为
(5)
其中,λxc和λyc分别为X和Y方向上的截止波长.
2.3 海底地形高程图与陆地地形高程图的无缝拼接
实现海底地形高程图与陆地地形高程图的无缝拼接的具体步骤如下:
首先,将陆地地形高程图内对应海底地形岸线区域的经纬度坐标变为行列号坐标.一般使用仿射变换和地面控制点(Ground Control Point, GCP)点对来表示栅格行列号坐标与地理坐标之间的关系.本文利用最常用的仿射变换来表示,其关系式为
(6)
(7)
式中:X,Y为图像左上角的地理坐标;R1和R2分别为图像横向(东西方向)和纵向(南北方向)的分辨率;ω1为旋转系数(对于正北方向的图像,ω1=0);ω2为旋转角度(对于正北方向的图像,ω2=0).这6个参数构建了图像行列号坐标(P,L)与投影坐标(XP,YP)之间的转换关系.然后,将海底地形高程图进行相应的尺度变换,使海底地形高程图里的岸线与陆地地形高程图里对应的岸线相匹配(图3),即匹配陆地地形高程图对应岸线位置的行列号坐标(P,L).最后,利用GDAL将海底地形高程图里的高程值填入陆地地形高程图中对应的位置[17],形成具有陆地地形数据和海底地形数据的全球高程图.该拼接过程的平均误差在5 m左右.
由于本文使用的陆地地形高程图(图4)精度略低,为43 200×21 600像素,所以对应海底地形区域的像素较少(如对应的长江口区域仅154×81像素),无法形成高精度的海底地形.本文提出使用VPB工具命令(OsgDEM),先将海底地形高程图和纹理图生成海底地形块,然后将其叠加到全球高程图里对应的海底地形区域,从而得到精度高且具有真实感的海底地形.

图3 海底地形高程图与陆地地形高程图拼接示意图

图4 陆地地形高程图
3 地形显示速率的优化
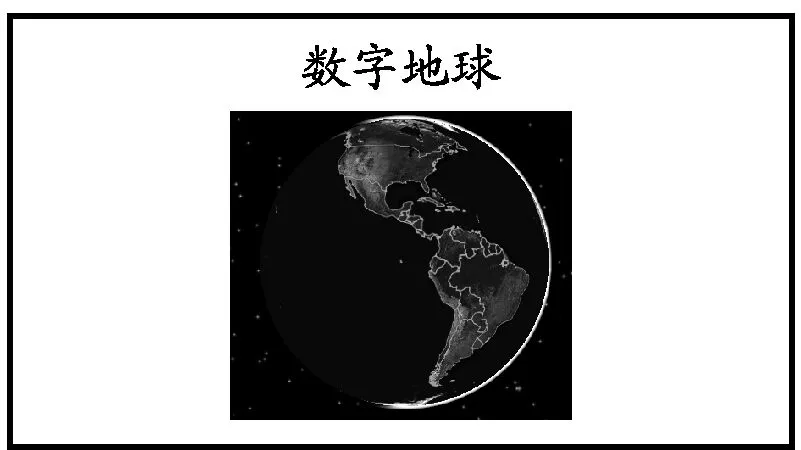
借鉴Google公司的Google Earth的实现思路,在数字地球上显示陆上地貌和3D海域地理环境,将生成的具有海底地形和陆地地形的全球高程图与影像信息集成到数字地球这一椭球面上.首先利用全球高程图,基于OsgEarth编写Earth文件,生成具有高程值的地球框架,然后将陆地地形卫星影像和海底地形纹理图映射到地球表面,再将其他相关数据集成到地球上,实现数字地球.搭建数字地球最关键的技术是组织卫星影像数据.
当对数字地球进行漫游时,随着将视点慢慢拉近地面,观察到的地形逐渐清晰.为实现清晰效果,通常需要被映射到地球表面的影像数据达到几百TB的量级,然而以如今的计算机内存和处理器的速度还无法实时渲染所有的数据.为降低计算机内存的消耗,加快计算机处理速度,需要找到一种合理的影像数据调度方法.
由于相机的视距范围总是有限的,借鉴3D数据检索与显示时用到的多层次细节(Levels Of Detail, LOD)技术,将卫星影像数据分成不同的分辨率,拉近视点时加载高分辨率影像数据,拉远视点时加载低分辨率影像数据.基于该方法对卫星影像数据采样并按其分辨率不同进行分级存放,这被称为金字塔技术.
金字塔技术是以多分辨率解释影像的一种结构,它通常使用典型的四叉树法对数据进行分层、分块组织(见图5).通过使用许多连续的LOD层次,建立一个多分辨率图像金字塔.第1层为原始影像图,第2层影像是通过对原始影像图采样获得的,其影像大小为原始影像图的1/4.这样逐层采样下去可完成全球卫星影像数据分级,它们之间是2的指数关系,所有的块被组织进一个四叉树.本文将影像分为6层(见表1).

图5 四叉树结构
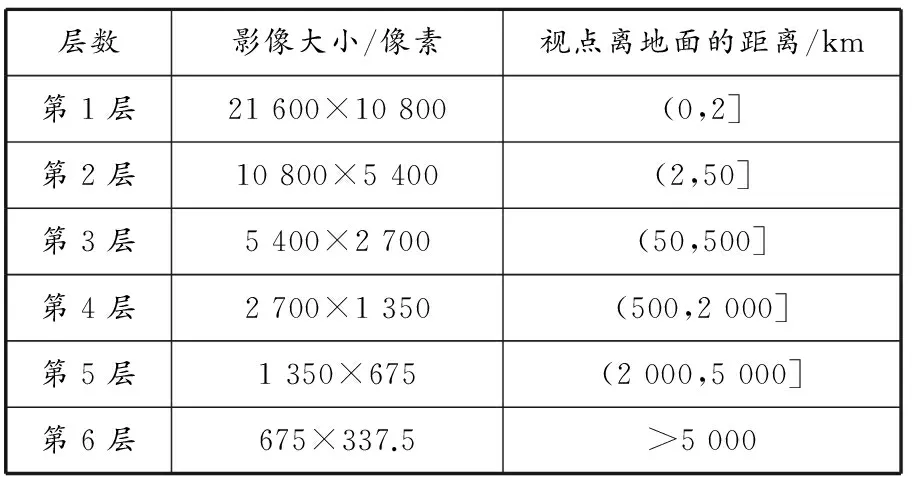
表1 全球卫星影像图分层
4 实验结果
为验证方法的有效性,在Visual C++ 2012开发环境下运用OsgEarth实现面向船舶动态监控的全球3D场景管理系统的陆地地形与海底地形的渲染,同时对采用的算法进行定量与定性分析.实验环境:Intel® CoreTMi7-4710HQ CPU @ 2.50 GHz四核的处理器,16 GB内存,NVIDIA GeForce GTX 970M的显卡,显存1 GB.
4.1 海底地形高程图生成及优化
图6a)为经最小二乘法拟合某块海图数据所得的高程图,图6b)为经高斯滤波优化后所得的高程图.从图中可以看出,经高斯滤波后噪声点明显减少,说明所采用的方法合理有效.

a)经最小二乘法拟合所得高程图b)经高斯滤波优化后所得高程图
图6 海底地形高程图生成及优化
4.2 将优化后的海底地形高程图与陆地地形高程图进行无缝拼接
图7为海底地形高程图与陆地地形高程图进行无缝拼接后的立体图和平面图展示.从图中可以看出,根据两者岸线信息的一致性,通过GDAL实现了两者高程图之间的无缝拼接.

a)立体图

b)平面图
4.3 卫星影像数据的组织
图8为全球卫星影像数据分层示意图.从图8a)到8d)(即依次为第6,5,2,1层影像数据),视点离地面的高度分别为5 000 km以上,5 000 km,50 km和20 km.由图可以看出,当拉近视点时,影像的网格逐渐变密,数据量逐渐增大,实现了数据的分层组织.

a)第6层影像数据
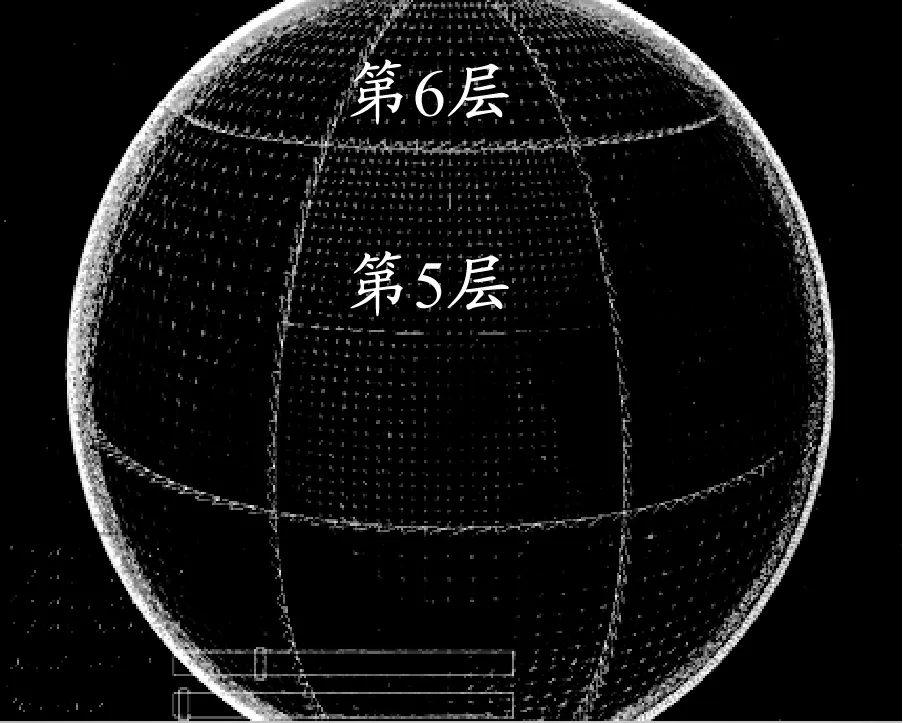
b)第5层影像数据
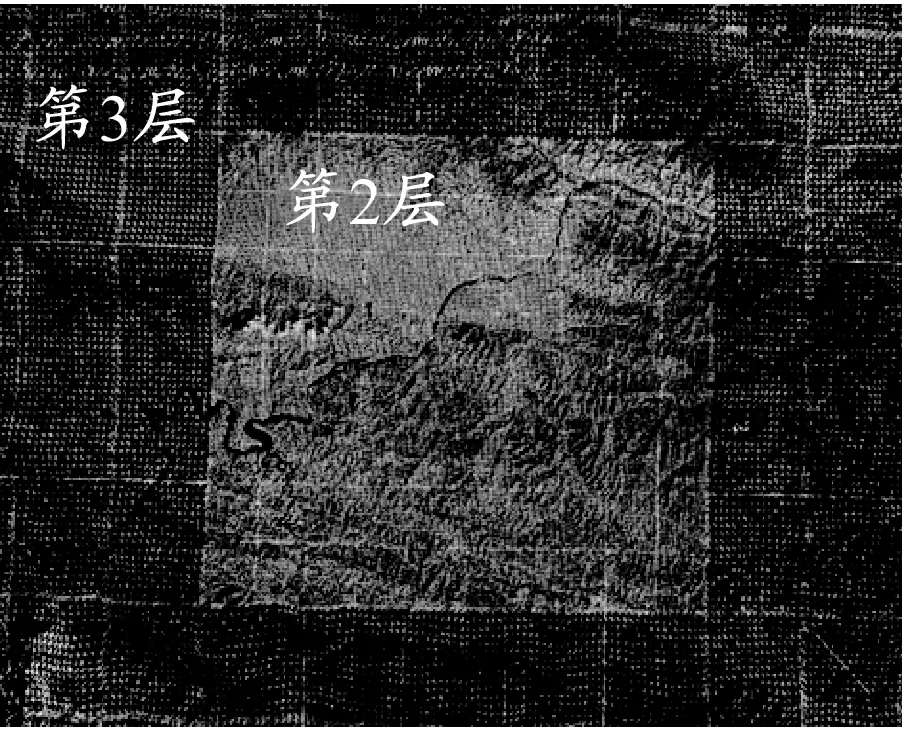
c)第2层影像数据

d)第1层影像数据
用长江口和舟山海域水深点和等深线数据绘制海底地形,表2为绘制海底地形的参数统计.为验证所提方法的有效性,对绘制的海底地形的几何精度误差和帧速率进行测试,并与文献[12]的基于区域层次细节(Area LOD,ALOD)绘制的海底地形进行对比,见表3.从表2和3可以看出,随着水深点个数的增加,矩形分块拟合多项式的阶数上升,几何精度误差减小.与文献[12]的方法相比,本文所提方法在几何精度和帧速率上具有非常明显的优势,对船舶动态监控具有非常重要的意义.
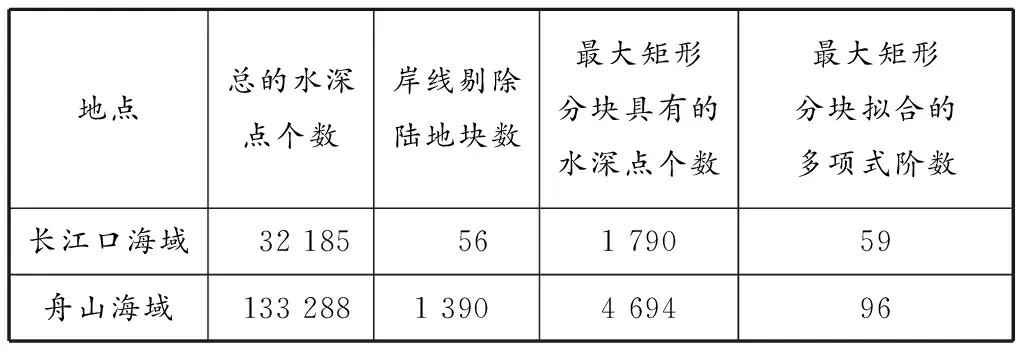
表2 绘制海底地形的参数统计
表3 本文方法的几何精度误差和帧速率评估以及与文献[12]的对比
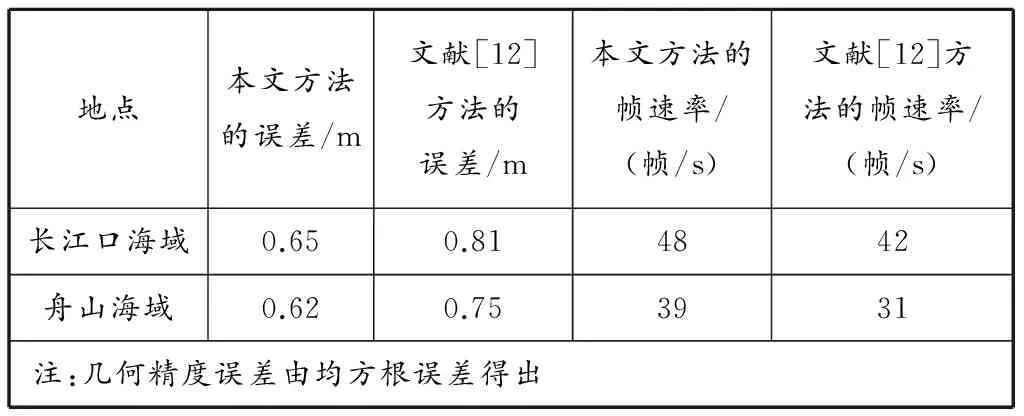
地点本文方法的误差/m文献[12]方法的误差/m本文方法的帧速率/(帧/s)文献[12]方法的帧速率/(帧/s)长江口海域0.650.814842舟山海域0.620.753931注:几何精度误差由均方根误差得出
图9为长江口和舟山海域海底地形显示的帧速率,图10为某次系统运行时长江口和舟山海域的渲染状态.从图中可以看出随着视点在长江口和舟山海域漫游时,帧速率分别保持为40~60帧/s和30~60帧/s,渲染效率良好.
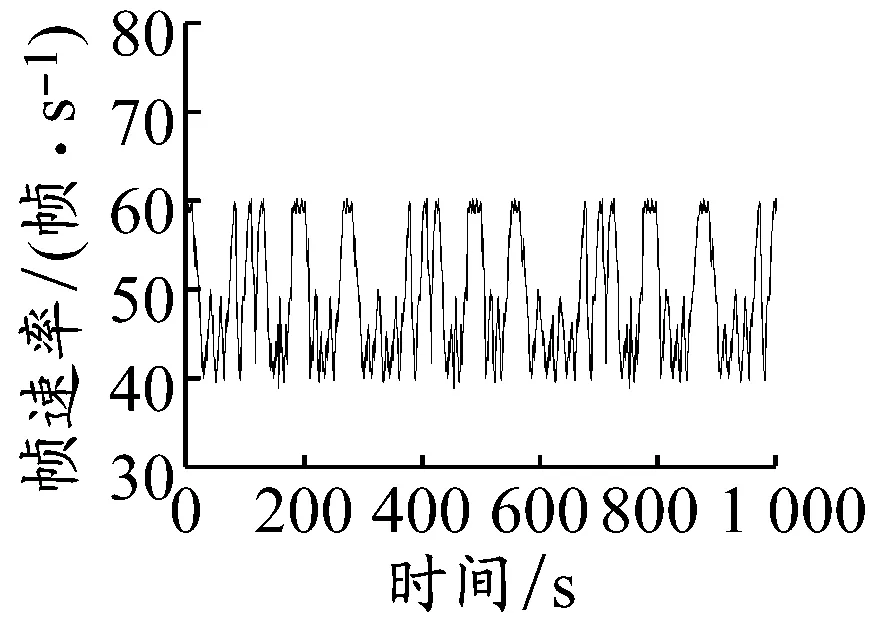
a)长江口海域
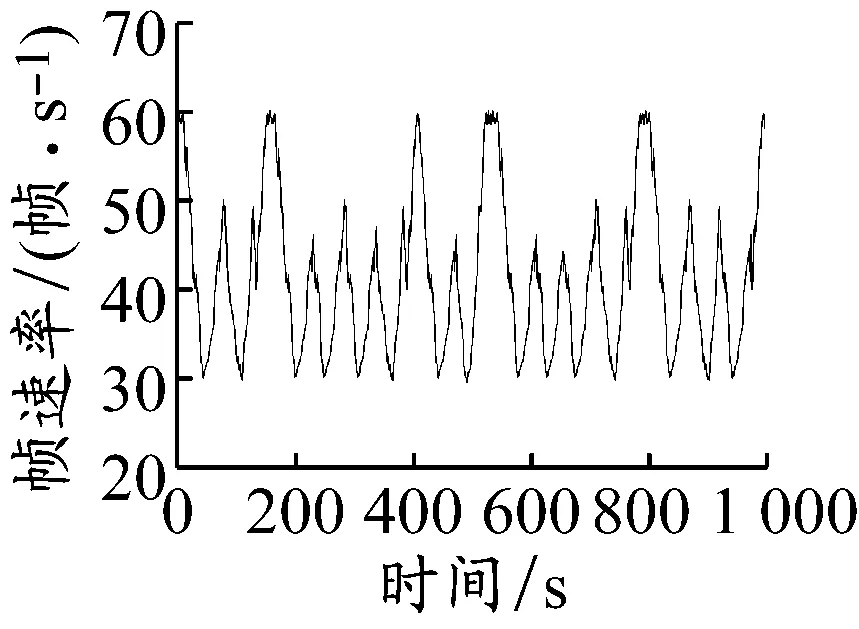
b)舟山海域
a)长江口海域
b)舟山海域

图11 全球地形整体概览图
图11为采用本文方法绘制的全球地形整体概览图.该图不仅取得了良好的视觉效果,而且能集成全球所有海域的海底地形(即只要有水深点数据,就能生成海底地形并集成到该数字地球框架内).图12为长江口海域海底地形绘制效果图,其中图12a)和12b)为文献[12]绘制的效果图,图12c)和12d)为本文绘制的铺上海水的效果图.通过对比发现,本文绘制的海底地形图在视觉效果上取得了进一步的提升.

a)文献[12]的大范围海域b)文献[12]的航道局部海域c)本文的大范围海域d)本文的航道局部海域
图12 本文与文献[12]的长江口海域海底地形绘制效果对比
5 结 论
为有效解决目前面向船舶动态监控的全球3D场景管理系统实现过程中的一些关键问题,提出先利用最小二乘法生成海底地形高程图,再利用高斯滤波器对高程图进行平滑处理,解决由于过拟合或欠拟合所产生的噪声点.再根据陆地地形高程图与海底地形高程图之间岸线信息的一致性对两者进行无缝拼接,生成全球高程图.利用金字塔技术解决由于加载全球影像数据产生的庞大数据量而使帧速率降低的问题.这些问题的解决为面向船舶动态监控的全球3D场景管理系统的实现提供了一种具有可操作性的解决方案,同时也为全球3D场景中海底地形的几何保持提供了保障,对面向船舶动态监控的全球3D场景管理关键技术的发展具有非常重要的促进作用.
[1]贾传荧, 史国友, 贾银山, 等. 基于电子海图的船舶动态监控系统设计与实现[J]. 大连海事大学学报, 2002, 28(3): 20-22. DOI: 10.3969/j.issn.1006-7736.2002.03.006.
[2]王艳军, 王晓峰. AIS和北斗终端组合在船舶动态监控中的应用[J]. 上海海事大学学报, 2011, 32(4): 17-21.
[3]FORD S F. The first three-dimensional nautical chart[M]//WRIGHT D. Undersea with GIS. Redlands, CA: ESRI Press, 2002: 117-138.
[4]RAY C, GORALSKI R, CLARAMUNT C,etal. Real-time 3D monitoring of marine navigation[M]//Information Fusion and Geographic Information Systems. Berlin Heidelberg: Springer, 2011: 161-175.
[5]ZLATANOVA S, RAHMAN A A, PILOUK M. 3D GIS: current status and perspectives[J]. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2002, 34(4): 66-71.
[6]GORE A. The digital Earth: understanding our planet in the 21st century[J]. Photogrammetric Engineering & Remote Sensing, 1998, 43(6): 5-5.[7]GOODCHILD M F. The use cases of digital Earth[J]. International Journal of Digital Earth, 2008, 1(1): 31-42. DOI: 10.1080/17538940701782528.
[8]李德仁, 龚健雅, 邵振峰. 从数字地球到智慧地球[J]. 武汉大学学报(信息科学版), 2010, 7(2): 127-132. DOI: 10.13203/j.whugis2010.02.018.
[9]郭华东. 数字地球: 10年发展与前瞻[J]. 地球科学进展, 2009, 24(9): 955-962.
[10]郭达志, 杜培军, 盛业华. 数字地球与3维地理信息系统研究[J]. 测绘学报, 2000, 29(3): 250-256. DOI: 10.3321/j.issn:1001-1595.2000.03.012.
[11]CHI Mingwen, LIU Zhifeng, WEI Zhenhua. An improved method for 3D modeling of complex terrain[J]. Environmental Science and Information Application Technology, 2010(2): 234-237. DOI: 10.1109/ESIAT.2010.5567338.
[12]王胜正, 黄玉贵, 施朝健. 基于区域层次细节绘制的3D ECDIS实现方法[J]. 中国造船, 2014, 55(3): 175-185. DOI: 10.3969/j.issn.1000-4882.2014.03.020.
[13]LIANG Zhongxing, LIU Dan, ZHOU Ming. Research on large scale 3D terrain generation[C]//2014 IEEE Conference on Computational Science and Engineering. IEEE, 2014: 1827-1832. DOI: 10.1109/CSE.2014.335.
[14]LIU Liang, YU Xiaoqing, WAN Wanggen,etal. Rendering of large-scale 3D terrain point cloud based on out-of-core[C]//2012 International Conference on Audio, Language and Image Processing. IEEE, 2012: 740-744. DOI: 10.1109/ICALIP.2012.6376712.
[15]LIVNY Y, KOGAN Z, EL-SANA J. Seamless patches for GPU-based terrain rendering[J]. The Visual Computer, 2009, 25(3): 197-208. DOI: 10.1007/s00371-008-0214-3.
[16]霍晓程, 李小平. 用最小二乘法拟合曲面方程[J]. 赤峰学院学报(自然科学版), 2009, 25(6): 11-13. DOI: 10.3969/j.issn.1673-260X.2009.06.006.
[17]WARMERDAM F. The geospatial data abstraction library[M]//Advances in Geographic Information Science. Berlin Heidelberg: Springer, 2008: 87-104.
(编辑 赵勉)
Key technique of global 3D scene management for ship dynamic surveillance
LI Cong, WANG Shengzheng
(Merchant Marine College, Shanghai Maritime University, Shanghai 201306, China)
To overcome the disadvantages of current ship dynamic surveillance systems so as to improve the intuition of the surveillance flatform, the 3D visualization technology is employed to intuitively manage the ships in 3D sea space. The 3D sea geographic environment is automatically created based on electronic chart data. The land topography is seamlessly integrated with the 3D sea geographic environment by the OsgEarth-based global scene management platform. The pyramid technology is used to effectively organize image data so as to build the global 3D ship dynamic surveillance system. The effectiveness of the proposed method is analyzed quantitatively and qualitatively through experiments. The proposed method provides a new idea for the global 3D scene management of ship dynamic surveillance.
ship dynamic surveillance; 3D visualization; scene management; digital Earth
10.13340/j.jsmu.2017.01.001
1672-9498(2017)01-0001-06
2016-04-16
2016-07-13
国家自然科学基金(51379121,61304230);上海市曙光计划(15SG44);上海市船舶工程重点实验室基金(K2015-12)
李聪(1991—),男,重庆万州人,硕士研究生,研究方向为海上交通系统的优化方法与智能化,(E-mail)162208241@qq.com; 王胜正(1976—),男,湖南双峰人,教授,博士,研究方向为航海仿真、船舶智能航行和大数据机器学习,(E-mail)szwang@shmtu.edu.cn
U675.79
A
猜你喜欢
大科技·百科新说(2022年4期)2022-05-30 10:48:04
中国信息化(2022年4期)2022-05-06 21:24:05
中国宝玉石(2021年5期)2021-11-18 07:42:32
石油化工建设(2020年1期)2020-08-24 07:02:02
小哥白尼(军事科学)(2019年7期)2019-11-16 09:03:38
海洋信息技术与应用(2017年2期)2017-06-21 19:51:29
小哥白尼·趣味科学画报(2016年1期)2016-05-30 18:19:16
河北遥感(2014年3期)2014-07-10 13:16:48
小星星·阅读100分(低年级)(2014年1期)2014-02-19 17:46:37
中华海洋法学评论(2013年2期)2013-03-11 20:02:49