
全地形铰接式履带车辆原地转向运动学与动力学建模
2017-07-21 05:09董超成凯胡文强姚禹高学亮
中南大学学报(自然科学版) 2017年6期
董超,成凯,胡文强,姚禹,高学亮
全地形铰接式履带车辆原地转向运动学与动力学建模
董超1,成凯1,胡文强1,姚禹1,高学亮2
(1. 吉林大学机械科学与工程学院,吉林长春,130022;2. 吉林大学汽车仿真与控制国家重点实验室,吉林长春,130022)
针对铰接式履带车辆原地转向过程中的运动学参数与动力学参数求解计算问题,在研究铰接式履带车原地转向工作机理及借鉴现有双履带车转向研究方法的基础上,采用数学建模的方法建立铰接式履带车原地转向运动学与动力学模型,从理论上推导用于分析计算铰接式履带车原地转向时的转向半径、转向角度、转向驱动力矩、履带受到的摩擦阻力及摩擦阻力矩、铰接点处受到的阻力及阻力矩等的计算公式,并结合某一具体车型进行数值求解,最后采用虚拟样机技术对所建立的理论模型进行验证。研究结果表明:该研究成果能为铰接式履带车辆的结构设计及评价整车机动性能等提供理论依据。
铰接式履带车辆;原地转向;转向半径;运动学模型;动力学模型
铰接式履带车通过铰接机构将多节车体串联在一起。在铰接机构的灵活作用下各个车体可以根据不同的地形条件实时地改变位姿,从而使得各条履带更好地与地面接触,有“全地形履带车”的美誉[1]。铰接式履带车因其具有较大的载重能力、良好的通过性、较强的机动性等特点广泛地应用于军事、农业、林业等工程领域,为国防安全建设及国民经济建设发挥着重要作用[2−3]。转向性能作为评价铰接式履带车机动性的重要指标已经引起人们的广泛关注,如:EDLUND等[4]采用虚拟样机技术对串联式铰接履带车的越障性能和转向性能进行了分析;成凯等[5−6]对铰接履带车转向与俯仰运动性能进行了研究;李力等[7]基于Lyapunov理论对铰接履带海底矿用车的行走轨迹进行了点镇定控制;谢基晨[8]采用协同仿真技术对铰接式履带车转向、行驶工况进行了仿真分析。但现阶段人们对铰接式履带车转向性能的研究主要集中于车辆行驶过程中牵引转向性能的研究,而对车辆原地转向性能的分析较少。而在一些特定条件下如极限或者较小弯道路况时,铰接式履带车只能通过原地转向才能正常工作,所以,从实际工程角度看,研究车辆原地转向性能对设计车辆整体结构及评价整车机动性能等具有重要的现实意义。同时,铰接式履带车原地转向所需要的原动力完全来自于铰接机构,不依赖于传动系统,因此,分析车辆原地转向性能的难度远大于分析牵引转向性能的难度,从理论层面来看研究铰接式履带车原地转向性能对促进履带车辆行驶力学的发展也具有重要意义。为了建立一套确实可行的用于分析研究铰接式履带车原地转向性能的方法,本文作者在研究铰接式履带车原地转向的特征及借鉴现有双履带车转向研究方法的基础上,采用数学建模的方法建立铰接式履带车原地转向运动学与动力学模型,推导出用于分析计算车辆原地转向半径、转向角、铰接机构所能提供的转向力矩、车体受到的转向阻力以及铰接机构受到的阻力等的理论计算公式,并以某一具体车型进行数值求解,最后通过虚拟样机技术对所建模型进行验证。
1 铰接式履带车辆原地转向运动学关系
1.1 铰接式履带车原地转向机理
全地形铰接式履带车的原地转向方式不同于传统单履带车。传统单履带车主要通过改变内外两侧履带的运转方向来现实原地转向运动,如:若左侧履带向前运转,右侧履带向后运转,则车辆向右侧原地转向;若左侧履带向后运转,右侧履带向前运转,则单履带车向左侧原地转向。车辆在原地转向过程中受到的转向阻力主要依靠履带主动轮输出来的驱动力来克服。而全地形铰接式履带车并不是通过控制内、外两侧履带的运转方向来现实原地转向运动,而是控制铰接机构中左、右转向液压缸的伸缩量来改变前后车体的位姿,从而实现原地转向运动,在此过程中,内、外两侧履带并不向外输出驱动力。若铰接机构中的左转向液压缸处于伸长状态,右转向液压缸处于缩短状态,则车辆沿着转向轨迹向右转向,此时,前、后车体相对于初始位置转过角度;若铰接机构中的左转向液压缸处于缩短状态,右转向液压缸处于伸长状态,则车辆沿着转向轨迹向左转向,此时前后车体相对于初始位置转过角度1(具体如图1所示),车辆在原地转向过程中受到的转向阻力主要由转向液压缸提供的驱动力矩来克服。图1中,-为全局坐标系,1-111为前车坐标系,2-222为后车坐标系。

(a)车辆向左原地转向;(b)车辆水平行驶;(c)车辆向右原地转向
1.2 铰接机构运动学分析
铰接机构作为铰接式履带车的关键组成部分,它是由4个液压缸(一对控制车辆左、右转向运动的液压缸;另一对控制前、后车体俯仰运动的液压缸)、传动轴轴套、支撑杆以及若干个连接点组成,如图2所示。通过控制铰接机构中的左、右转向液压缸可以使前车体相对于后车体作左、右摆动运动;通过控制铰接机构中的俯仰液压缸可以使前车体相对于后车体作上、下俯仰运动,同时后车体配有传动轴轴套可以实现前、后车体的相对扭转。这是由于这种特殊的铰接连接方式使得车辆可以根据地形条件不断地改变前后车体的位姿,从而保证了行驶的安全性。

图2 车辆原地转向时铰接机构的位姿
图3所示为铰接履带车原地转向时铰接机构运动原理简图。图3中:1和分别为铰接履带车向左转向和向右转向时车辆的转向角;Δ1和Δ1分别为铰接履带车向左转向和向右转向时后车铰接点3的横向、纵向移动的距离;Δ2和Δ2分别为铰接履带车向左转向和向右转向时后车铰接点4的横向、纵向移动的距离;1和2分别为左右转向液压缸的初始安装角;3为后车铰接点到铰接点的距离;4为前车铰接点之间的距离;7为后车铰接点之间的距离;8为前车铰接点到铰接点的距离;为前车铰接点到铰接点之间的距离;为后车铰接点到铰接点之间的距离;为前车铰接点到铰接点之间的距离;为后车铰接点到铰接点之间的距离;1为车辆向左转向时右转向液压缸的伸长量;2为车辆向右转向时右转向液压缸的收缩量;1为车辆向左转向时左转向液压缸的收缩量;2为车辆向右转向时左转向液压缸的伸长量;30为车辆向右转向时右转向液压缸安装角的减小量;40为车辆向右转向时左转向液压缸安装角的增加量;10为车辆向左转向时右转向液压缸安装角的增加量;20为车辆向左转向时左转向液压缸安装角的减小量。若左、右转向液压缸均没有收缩,则此时前后车体处于同一水平线上,车辆尚未进行原地转向运动,此时,铰接机构的位姿如图3(a)所示;若左转向液压缸伸长,则右转向液压缸缩短时车辆向右侧进行原地转向运动,此时,左、右转向液压缸分别以铰接点为圆心进行旋转,当前后车体同时转过角度时,前车铰接运动到1点处,前车铰接运动到1点处,后车铰接点运动到1点处,后车铰接点运动到1点处,如图3(b)所示;若左转向液压缸缩短,则右转向液压缸伸长时车辆向左侧进行原地转向运动,此时,左、右转向液压缸分别以铰接点为圆心进行旋转,当前后车体同时转过角度1时,前车铰接运动到2点处,前车铰接运动到2点处,后车铰接点运动到2点处,后车铰接点运动到2点处,具体如图3(c)所示。
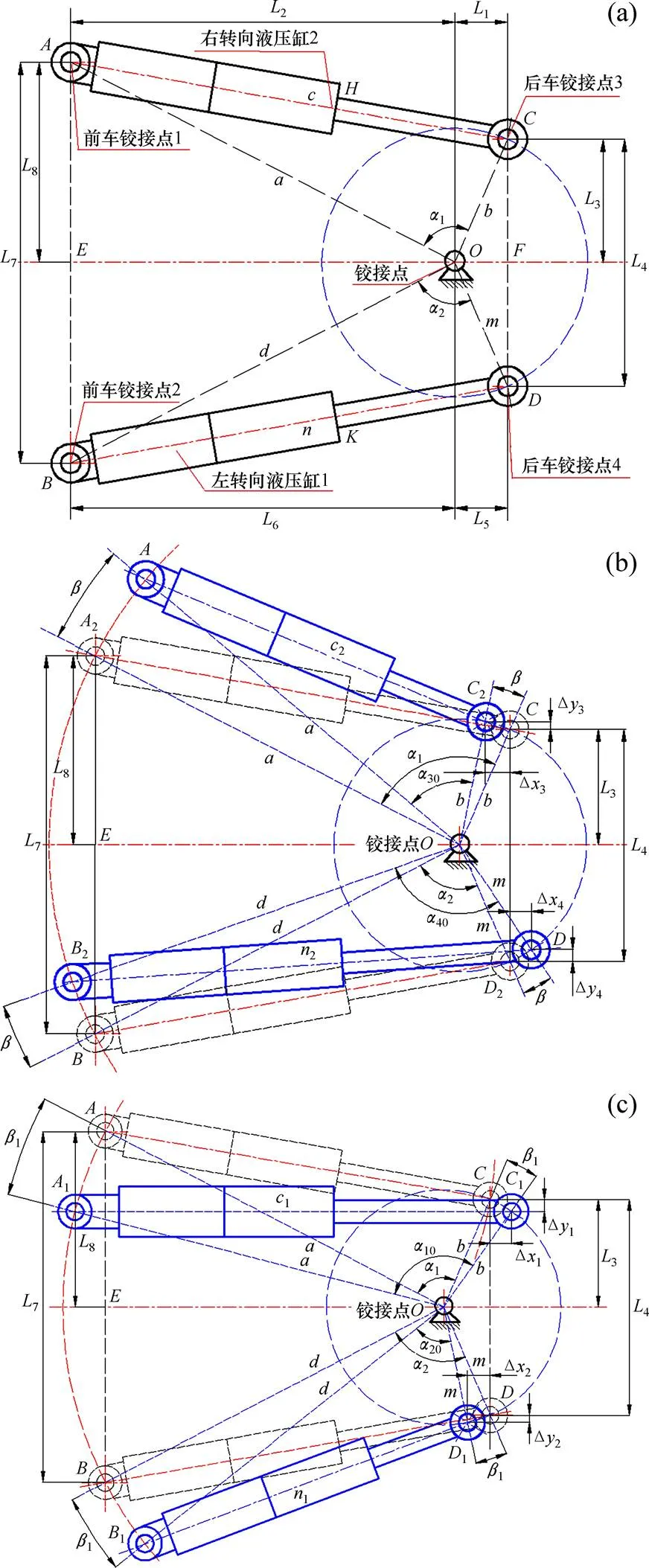
(a) 车辆初始位置时铰接机构位姿;(b) 车辆右转向时铰接机构位姿;(c) 车辆左转向时铰接机构位姿
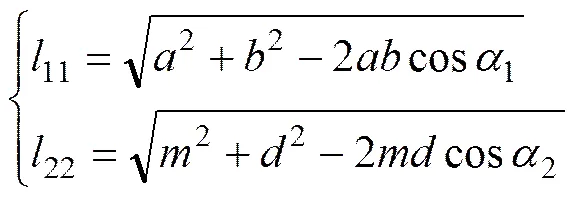
当铰接履带车向右原地转向时,根据图3(b)中的几何关系,有

(1)
式中:11和22分别为和的初始距离即转向液压缸的初始安装距离;10和20分别为车辆向右转向时右转向液压缸的收缩量和左转向液压缸的伸长量;为长度;为长度;为长度;为长度;为铰接履带车转角;1和2分别为∠与∠的初始角即转向液压缸的安装角;为车辆的转向角。由式(1)可以推导出车辆向右原地转向时车辆的转角与铰接机构参数之间的关系为

(2)
式(2)中,11和22可以据图3(a)中几何关系求得
当车辆向右原地转向时,右转向液压缸的缩短量与左转向液压缸的伸长量为
(4)
根据图4中△与△的面积公式,可以求得左、右转向液压缸对铰接点的力臂为
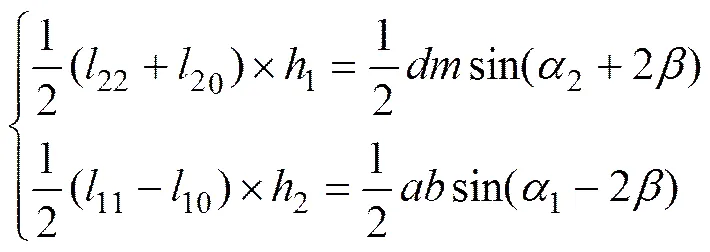
则左、右转向液压缸对铰接点的力臂1和2分别可表示为
(6)

图4 铰接机构中的转向液压缸力臂
铰接履带车向右原地转向时转向液压缸所能提供的转向力矩为

式中:为液压缸内输入油的压力;1和2分别为液压缸内径截面面积和液压杆截面面积,m2。同理,根据图3(c)中的几何关系可以得到铰接履带车向左原地转向1时车辆的转向角与铰接机构参数之间的关系为

式中:1为铰接履带车的转角;30和40分别为车辆向左转向时右转向液压缸的伸长量和左转向液压缸的缩短量,
(9)
铰接履带车向左原地转向时转向液压缸所能提供的转向力矩为

式(10)中的左、右转向液压缸对铰接点的力臂3和4分别可表示为
(11)
取=20°,将油缸参数=18 MPa,油缸缸筒内径=180 mm,活塞杆直径1=65 mm,=512.4 mm,=185.3 mm,=472.6 mm,=132.5 mm,1=128°,2=92°,代入式(1)~(11)可以求得左、右转向液压缸的初始安装距离22=477.2 mm,11=616.36 mm,前、后车体原地向右转向20°时左转向液压缸伸长量20=110.84 mm,右转向液压缸收缩量10=110.03 mm,1=79.11 mm,2=187.41 mm,1=π2/4=0.025 4 m2,2=π12/4=0.003 3 m2,则车辆向右原地转向时铰接机构所能提供的转向力矩为1=117.15 kN·m。
1.3 铰接式履带车辆原地转向运动学模型
铰接式履带车辆原地转向通过控制左、右转向液压缸的收缩与伸长来实现车体转向,假设铰接履带车转向过程中车辆始终保持匀速稳态转向且前后车体的转向角度始终保持相等,图5所示为充分考虑履带滑移/滑转时车辆原地转向运动学模型。由于履带的滑移/滑转使得前车与后车履带速度瞬心产生横向与纵向偏移量A和D(=1,2,3,4),使得履带速度瞬心由O位置偏移到O(=1,2,3,4)[9]。图5中,O为车辆理想状态下的转向中心,O1为车辆实际的转向中心,为履带宽度,为车体宽度,1为铰接点到前车重心1的距离,2为铰接点到前车重心2的距离,为车辆的转向角,1为车辆理想转向半径,2为车辆实际转向半径。此时,车辆实际转向半径2为

式中:1为铰接点到前车体质心1点的距离;1为履带速度瞬心纵向偏移量。当铰接机构绕铰接点转过角度时,车辆的转向角为,根据图5中的几何关系可得
(13)
由式(13)中的关系可得
∠=2∠(14)
(15)
将式(2)与式(15)代入式(12)可得铰接履带车向右原地转向时的转向半径为

将1=4.5 m,1=0.25 m及铰接机构尺寸参数代入式(16),可以求得前后车体转向角为20°时履带车辆实际转向半径2=11.68 m。
图5 铰接式履带车辆原地转向运动学关系
Fig. 5 Kinematic relationship when vehicle pivot turns
2 铰接式履带车辆原地转向动力学关系
铰接式履带车辆原地转向时受到的外力主要来自于地面和自身。由于铰接式履带车辆行驶路况极其恶劣,因此,车辆受力情况较为复杂多变。为了便于研究铰接式履带车辆原地转向时的动力学特性,进行如下假设:
1) 履带车辆作稳态转向且车辆行驶力系数在整个转向过程中不发生变化。
2) 履带接地段压力分布呈连续线性分布,不考虑履带的张紧力对接地压力的影响。
3) 由于履带车原地转向时车速较低,故不考虑离心力对转向性能的影响。
4) 原地转向过程中车体质心始终与车体几何中心重合。
2.1 履带转向摩擦阻力
车辆转向时履带受到的阻力主要来自于地面摩擦阻力[10]。为了计算履带所受的摩擦阻力,建立局部坐标系,以履带速度瞬心为原点,以履带横向为轴正方向,纵向为轴正方向,如图6所示。图7所示为铰接式履带车原地转向过程中前后车体受到的转向阻力情况。图7中:F为地面对履带产生的摩擦阻力在轴上的分量;F为地面对履带产生的摩擦阻力在轴上的分量;O为履带的几何中心;=1,2,3,4。

图6 单一履带接地段受到的摩擦阻力
履带上任意选取1个微小单元,则转向时地面对该微小单元产生的摩擦阻力在轴、轴上的分量为
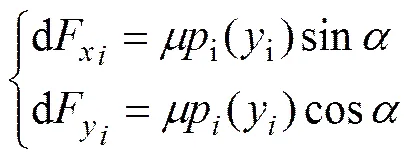
式(17)中三角函数关系可以表示为
(18)
将式(18)代入式(17)并对其积分便可得到地面对履带产生的摩擦阻力在轴、轴上的分量(如图7所示)为:

地面摩擦对履带产生的转向阻力矩为

式中:为地面摩擦因数,=0.9;P(y)为履带接地压力,p(y)=j/(2bl);m为前后车质量;b和l分别为履带的长度、宽度;=1,2;=1,2,3,4;为微小单元与履带瞬心间的夹角;A为内、外侧履带速度瞬心横向偏移量;D为内、外侧履带速度瞬心纵向偏 移量。
图7 履带车原地转向时接地段受到的摩擦阻力
Fig. 7 Tracked vehicle steering friction
表1所示为铰接式履带车辆相关的结构尺寸参数。将表1中数据代入式(19)与(20),求得各条履带所受到的摩擦阻力和摩擦阻力矩如表2所示。
2.2 履带沉陷阻力
履带行驶在弹塑性土壤上,土壤因受到垂直载荷发生形变,根据Bekker土壤承载理论[11−12],土壤的变形量可以表示为:

(21)
履带车在转向过程中需要克服土壤沉陷阻力作功。履带克服土壤沉陷阻力作功可以表示为[13−14]:

通过积分可以求得,履带车转向过程中履带克服土壤沉陷阻力所作的功为
(23)
根据功能原理W=Fl,则车辆转向时履带所受到的沉陷阻力为

式中:P(y)为履带接地压力;0为履带的沉陷量;c为土壤内聚力模量;为土壤内摩擦力模量;为土壤变形指数;l为履带长度。设定铰接式履带车行驶路面为黏性土壤,黏性土壤的物理参数如表3所示[15]。
将土壤参数及车辆几何参数代入式(21)与(24)求得:0=0.49 m;F=5.55 N。

表3 黏性土壤参数[15]
2.3 侧面土壤对履带产生的推土效应
根据Bekker土壤承压理论,软质土壤受到垂直载荷时往往发生弹性形变,所以,铰接履带车行驶在软质土壤上时履带接地处往往会下陷一定深度0,当车辆原地转向时内外两侧履带会剪切侧面土壤;反之,侧面土壤会对履带产生推土阻力,从而影响着车辆的转向性能,如图8所示。图8中:N为楔形土壤下面土壤对其的作用力;θ为单位面积上的土壤内聚力;为土壤内摩擦角;R为单位面积上的推土阻力;0为土壤沉陷量;为土壤楔形角度;φ履带板壁的摩擦角;为剪切面上方的楔形土壤的重力,=s02cot/2;为土壤的剪切面,剪切面上方的楔形土壤在重力的作用下有向下滑动的趋势,为了阻止其滑动剪切面下方的楔形土壤对上方的楔形土壤产生1个反作用力N。
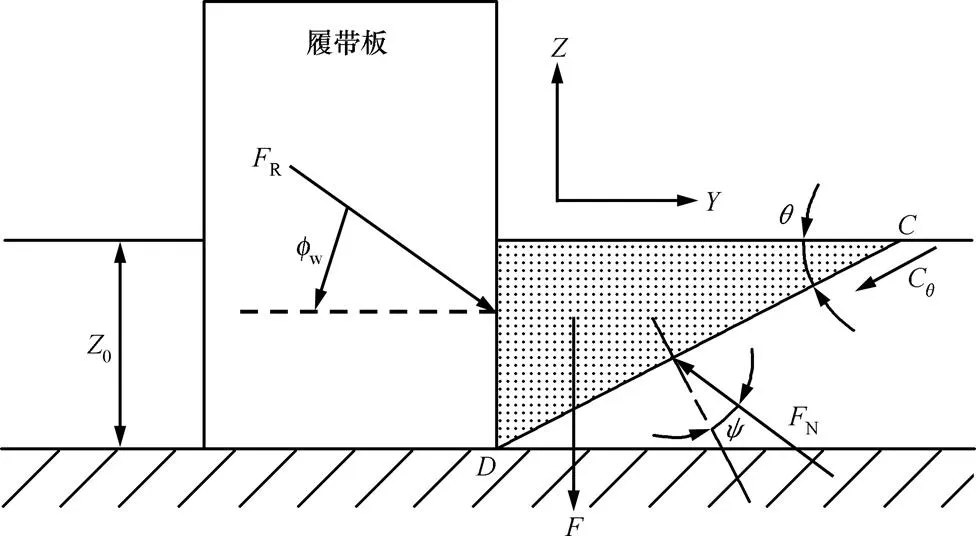
图8 侧面土壤对履带产生的推土效应
根据上述假设,由于车辆始终处于稳态原地转向,因此任意时刻时履带受力是平衡的,即有[16]:

根据上式可得单位面积上的推土阻力F为
(26)
对式(26)进行积分可得侧面土壤对履带产生的推土阻力及阻力矩为

式中:F为土壤对履带板产生的推土阻力,式(26)与式(27)中F的方向相同,其方向与水平面呈角度(见图8);为土壤楔形角度;w为履带板壁的摩擦角;s为土壤容重;Z0为土壤沉陷量,据式(21)求得;为土壤内摩擦角;N为楔形土壤下面土壤对其的作用力;θ为单位面积上的土壤内聚力,由公式θ=0/sin求得;为土壤内聚力系数。式(27)是1个关于的函数,当R取最小值Rmin时,可以求得1个对应的,该值为楔形土壤发生破坏的临界值,此时,履带受到的推土阻力及阻力矩达到最大。
将土壤的相关参数代入式(27),所得结果如表4所示。
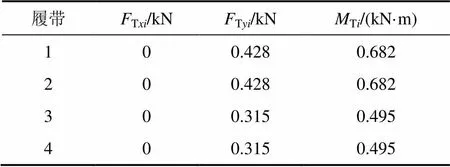
表4 各履带受到的摩擦阻力和摩擦阻力矩计算结果
2.4 铰接式履带车辆原地转向动力学模型
基于上述分析,铰接式履带车辆原地转向时整车受力如图9所示。图9中:F为地面对履带产生的摩擦阻力在轴上的分量;F为地面对履带产生的摩擦阻力在轴上的分量;M为地面摩擦对履带产生的转向阻力矩;F为侧面土壤对履带产生的推土阻力;M为侧面土壤对履带产生的推土阻力矩;F为车辆转向时履带所受到的沉陷阻力;f为履带受到的内部阻力;=1,2,3,4;F1和F2为车辆原地转向时铰接点处受到的阻力在轴上的分量;F1和F2为车辆原地转向时铰接点处受到的阻力在轴上的 分量。
以顺时针为正方向,图9中的各种阻力对铰接点取力矩得:



(29)
式中:f=uG/2;u=0.08;=1,2,3,4;G=mg,= 9.8 m/s2;=1,2;1为前车体的宽度;2为后车体的宽度;1为铰接点到前车体重心的距离;2为铰接点到后车体重心的距离;b为各条履带的宽度;D为车辆原地转向时各条履带速度瞬心产生的纵向偏移量。涉及的铰接式履带车辆尺寸参数如表5所示。

图9 铰接式履带车辆原地转向时整车动力学关系
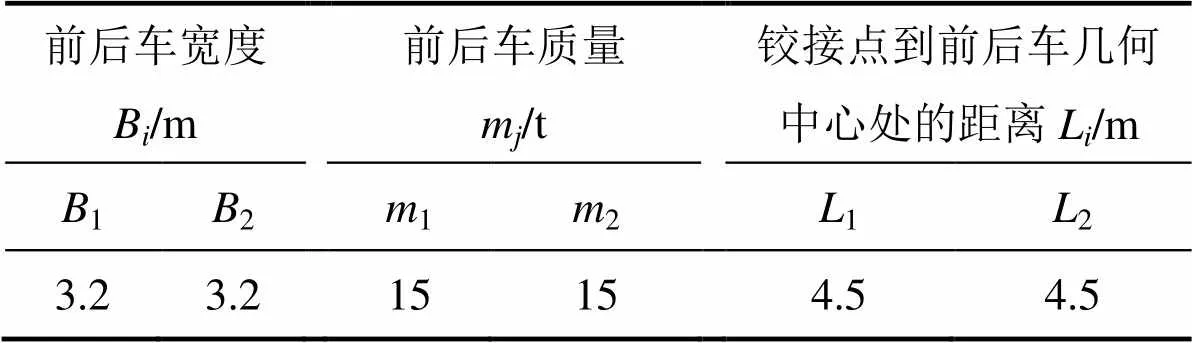
表5 铰接式履带车辆结构参数
将相关参数代入式(28)与(29)求得:

则铰接点处所受到的总阻力矩为
上式计算结果表明:铰接式履带前后车体原地转向200时铰接机构所能提供的转向力矩为=117.15 kN·m,大于101.324 kN·m,满足设计要求。
铰接点处受到的外力可以根据以下式求得:

将上述计算得到的参数代入式(30)求得:
根据作用力与反作用力相等的原则,铰接点处的外力为

3 虚拟样机仿真分析
为了验证所建立的铰接式履带车原地转向数学模型的正确性,采用Recurdyn软件建立虚拟样机进行验证。该仿真模型包括前车体、后车体、铰接机构、4条履带系统以及行驶路面,如图10所示。设定前、后车体的质量分别为15 000 kg,在全局坐系中设定重力方向垂直于地面,路面条件为黏性土壤,其相关参数按照表3中数据进行标定。为了有效地模拟车辆实际转向过程中履带与土壤之间的相互作用机理,履带板与土壤之间添加Bush力,其值设定为履带与土壤之间的摩擦力。由于车辆原地转向运动所需要的动力全部来自于铰接机构,因此,仅在铰接机构转向液压缸处添加驱动力,各个交接点处添加转动副,左转向液压缸添加平动副,如图11所示,此处位移驱动函数采用Recurdyn中的“step函数”,其函数格式为:step(time,起始时间,位移的变化量,终止时间,位移的变化量)。根据上述计算可知左转向液压缸伸长量为110.84 mm,因此,左转向液压缸上的平动副添加位移驱动函数为:step(time,2,0,3,0.110 84)+ step(time,5,0,8,−0.110 84),即:在0~2 s时左转向液压缸的位移为0 m,在3~5 s时左转向液压缸的伸长量为0.110 84 m,在5~8 s时左转向液压缸的收缩量为0.110 84 m。同理,依据右转向液压缸缩短量为110.03 mm,因此,右转向液压缸上的平动副添加位移驱动函数:step(time,2,0,3,−0.110 3)+step(time,5,0,8,0.110 3),即在0~2 s时右转向液压缸的位移为0 m,在3~5 s时右转向液压缸的收缩量为0.110 3 m,在5~8 s时左转向液压缸的伸长量为0.110 3 m。并设定仿真时间为8 s。

图10 铰接式履带车原地转向时的位姿

图11 铰接机构处的运动副及驱动力
图12所示为铰接式履带车虚拟样机仿真模型得到的车辆原地转向过程中的前、后车体质心的运动轨迹及其拟合圆。从图12可以看出:虚拟样机仿真模型得到的前、后车体质心的运动轨迹半径为12.5 m,该值与理论计算值11.68 m较接近,两者之间的相对误差为7.02%。该误差范围在工程实践中可以被接受,说明上述所建立的运动学模型是有效的。
图13所示为左转向液压缸伸长量为110.84 mm,右转向液压缸缩短量为110.03 mm,前后车体转向角为20°时虚拟样机仿真得到的铰接履带车铰接点处的力矩变化曲线。从图13可以看出:0~2 s时铰接点处的力矩变化为0 kN∙m;当=2 s时,铰接点处的力矩急剧增加;当=3 s时,铰接点处的力矩趋于平稳状态,在150 kN·m范围内波动,其波动值与上述理论计算值117.15 kN·m较接近,且大于理论上的阻力矩101.324 kN·m,证明了上述计算的有效性;当=5 s时,铰接点处的力矩逐渐减少到0 kN∙m。

图12 虚拟样机仿真得到的前后车体质心运动轨迹以及拟合圆

图13 左右转向液压缸在铰接点处的力矩变化曲线
图14与图15所示分别为铰接式履带车原地转向过程中铰接点处和方向上受力变化曲线。从图14和图15可以看出:1)在0~2 s阶段,铰接处和方向上受力近似为0 kN∙m;2)在2~3 s阶段,铰接处和方向上受力激剧增加;3)在3~5 s阶段,铰接处和方向上受力情况趋于平稳状态,此时,铰接处方向上受到的力在20~40 kN内波动,其波动区间与理论计算值22.734 kN较接近;铰接处方向上受到的力在10~20 kN内波动,其波动区间与理论计算值11.02 kN也较接近,验证了上述理论计算值的正确性;4)在5~8 s阶段阶段,铰接处和方向上受力逐渐减少。

图14 铰接点处X方向上的受力变化曲线

图15 铰接点处Y方向上的受力变化曲线
4 结论
1) 在研究铰接式履带车原地转向机理及铰接机构的工作原理基础之上,采用数学建模的思想建立了铰接式履带车原地转向运动学模型,从理论上推导出车辆原地转向时铰接机构转角、转向角度、转向半径等的理论计算公式,为求解分析铰接式履带车原地转向过程中的运动学相关参数提供了理论依据。
2) 在研究履带与地面相互作用机理的前提下,对铰接式履带车原地转向过程中整车的受力情况进行了分析,建立了车辆原地转向动力学模型,从理论上推导出各条履带转向阻力、转向阻力矩以及车辆原地转向时转向液压缸所要克服的阻力等的计算公式,为铰接机构的结构设计、液压系统的相关参数设计、液压缸的选型等提供了理论依据。
3) 履带的速度瞬心偏移量影响着车辆原地转向性能,尤其车辆行驶在黏性较大的土壤上此现象更明显。因此,在研究履带车行驶力学相关问题时,不可以忽略履带的滑移与滑转现象。
4) 采用虚拟样机技术验证了所建数学模型的有效性,说明该方法适用于分析铰接式履带车原地转向运动学和动力学相关问题。虚拟样机对分析铰接式履带车转向动力学是有效性的,因此,在工程实际误差允许范围内,采用虚拟样机技术对铰接式履带车行驶动力学分析也是一种快捷、有效的方法。
[1] JANARTHANAN B, PADMANABHAN C, SUJATHA C. Longitudinal dynamics of a tracked vehicle: simulation and experiment[J]. Journal of Terramechanics, 2012, 49(2): 63−72.
[2] 郑鑫, 姚寿文. 全地形履带车橡胶扭力轴套扭转刚度特性研究[J]. 汽车工程学报, 2013, 3(2): 125−132. ZHENG Xin, YAO Shouwen. Research on torsional stiffness of rubber torsion bushing for all-terrain tracked vechicle[J]. Chinese Journal of Automotive Engineering, 2013, 3(2): 125−132.
[3] WANG J Y. Development of high-mobility tracked vechicle for over snow operations[J]. Journal of Terramechanics, 2009, 46: 141−155.
[4] EDLUND J, KERAMATI E, SERVIN M. A long-tracked bogie design for forestry machines on soft and rough terrain[J]. Journal of Terramechanics, 2013, 50(2): 73−83.
[5] 成凯, 张俊, 曲振东. 铰接履带车转向及俯仰性能研究[J]. 兵工学报, 2012, 33(2): 134−141.CHENG Kai, ZHANG Jun, QU Zhendong. Research on the turning and pitching performances of articulated tracked vehicle[J]. Acta Armamentarii, 2012, 33(2): 134−141.
[6] 董超, 成凯, 胡文强,等. 考虑土壤剪切变形的铰接式履带车辆转向性能[J]. 吉林大学学报(工学版), 2016, 46(6): 1922−1932.DONG Chao, CHENG Kai, HU Wenqiang, et al. Steering performance analysis of articulated tracked vehicle considering soil shear deformation[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(6): 1922−1932.
[7] 李力, 张正, 陈铭, 等. 基于Lyapunov理论的海底采矿车点镇定控制[J]. 中南大学学报(自然科学版), 2014, 45(8): 2624−2628.LI Li, ZHANG Zheng, CHEN Ming, et al. Point stabilization of seabed mining vehicle based on Lyapunov theory[J]. Journal of Central South University (Science and Technology), 2014, 45(8): 2624−2628.
[8] 谢基晨. 车厢铰接式履带车协同仿真技术研究[D]. 大连: 大连理工大学机械工程学院, 2012: 1−51. XIE Jichen. The Co-simulation research of wagon articulated tracked vehicle[D]. Dalian: Dalian University of Technology. School of Mechanical Engineering, 2012: 1−51.
[9] 王红岩, 王钦龙, 芮强, 等. 高速履带车辆转向过程分析与试验验证[J]. 机械工程学报, 2014, 50(16): 162−171.WANG Hongyan, WANG Qinlong, RUI Qiang, et al. Analyzing and testing verification the performance about high-speed tracked vehicles in steering process[J]. Chinese Journal of Mechanical Engineering, 2014, 50(16): 162−171.
[10] 李勇, 姚宗伟, 王国强. 四履带车辆转向性能仿真研究[J]. 农业机械学报, 2011, 42(2): 34−38.LI Yong, YAO Zongwei, WANG Guoqiang. Steering performance simulation of four-tracked vehicle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(2): 34−38.
[11] 张克健. 车辆地面力学[M]. 北京: 国防工业出版社, 2001: 52−63. ZHANG Kejian. Vehicle-terramechanics[M]. Beijing: National Defense Industry Press, 2001: 52−63.
[12] BEKKER M G. Introduction to terrain-vehicle systems[M].Michigan, USA: University of Michigan Press, 1969: 39−48.
[13] 黄祖永. 地面车辆原理[M]. 北京: 机械工业出版社, 1983: 89−104.HUANG Zuyong. Heory of ground vehicle[M]. Beijing: China Machine Press, 1983: 89−104.
[14] 左鹏. 全地形铰接履带车行走系统研究[D]. 长春: 吉林大学机械科学与工程学院, 2012: 14−21.ZUO Peng. Research on travel system of all terrain articulated tracked vehicle[D]. Changchun: Jilin University. School of Mechanical Science and Engineering, 2012: 14−21.
[15] LE VAN QUYNH, 张建润, 刘晓波, 等. 振动压路机用于不同土壤地面的平顺性评价[J]. 农业工程学报, 2013, 29(9): 39−47. LE VAN QUYNH, ZHANG Jianrun, LIU Xiaobo, et al. Ride comfort evaluation of vibratory roller under different soil grounds[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(9): 39−47.
[16] 胡际勇. 重型履带车辆软地面行驶性能研究[D]. 长春: 吉林大学机械科学与工程学院, 2012: 20−22.HU Jiyong. Research about the travelling performance of heavy crawler vehicle on soft ground[D]. Changchun: Jilin University. School of Mechanical Science and Engineering, 2012: 20−22.
(编辑 陈灿华)
Kinematic and dynamic modeling of all terrain articulated tracked vehicle in process of spin steering
DONG Chao1, CHENG Kai1, HU Wenqiang1, YAO Yu1, GAO Xueliang2
(1. School of Mechanical Science and Engineering, Jilin University, Changchun 130022, China;2. State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130022, China)
For solving computational problems of the articulated tracked vehicle’s kinematic parameters and kinetic parameters during articulated tracked vehicle pivot turns, the articulated tracked vehicle pivot turning mechanism was studied and the basis of existing double-tracked vehicles steering research methods was drawn, the mathematical modeling approach was adopted to establish the articulated tracked vehicle kinematics and dynamics model during articulated tracked vehicle pivot turns, the turning radius formula, steering angle formula, steering drive torque formula, steering friction formula and resistance formula were theoretically deduced at the hinge point combined with a specific model. Finally, the virtual prototype was adopted to validate the established theoretical model. The results can provide a theoretical basis for the articulated tracked vehicle design and evaluation of vehicle’s motor performance.
articulated tracked vehicles; pivot turning; steering radius; kinematic model; kinetic model
10.11817/j.issn.1672−7207.2017.06.010
TH113
A
1672−7207(2017)06−1481−11
2016−07−10;
2016−08−21
国家自然科学基金资助项目(51375202);国家科技部国际科技合作项目(2009DFR80010)(Project(51375202) supported by the National Natural Science Foundation of China; Project(2009DFR80010) supported by the International Science and Technology Cooperation Program of National Science and Technology Department)
成凯,教授,博士生导师,从事工程车辆运动学与动力学研究;E-mail:kaicheng62@163.com
猜你喜欢
学校教育研究(2021年11期)2021-07-22
航空发动机(2021年1期)2021-05-22
兵器装备工程学报(2021年3期)2021-04-09
今日农业(2020年15期)2020-09-25
中国水运(2017年6期)2017-06-13
红领巾·成长(2015年9期)2015-09-10
科技视界(2014年6期)2014-12-24
科技与创新(2014年16期)2014-10-20
体育师友(2011年1期)2011-03-20
汽车零部件(2011年2期)2011-03-05
