基于北斗的桥梁转体施工倾覆安全预警阈值研究(一)
2017-07-07 13:17马福民陈正林孙军柱舒万华程广杰
四川建筑 2017年3期
马福民, 陈 钒, 陈正林, 孙军柱, 舒万华, 高 伟, 程广杰, 罗 琦
(中电建路桥集团有限公司, 北京 100048)
基于北斗的桥梁转体施工倾覆安全预警阈值研究(一)
马福民, 陈 钒, 陈正林, 孙军柱, 舒万华, 高 伟, 程广杰, 罗 琦
(中电建路桥集团有限公司, 北京 100048)
为了保证桥梁转体施工过程中不发生倾覆,基于北斗卫星导航系统对转体结构的四个控制角点位置进行实时监测,根据转动体系的构造,以重力合力不超出墩底截面核心为临界条件,确定最大允许偏角,继而确定转体发生倾覆的安全预警阈值,通过准确设置该值达到保障转体施工安全的目的。未来该方法可望广泛用于高效转体施工控制和桥梁健康监控。
桥梁工程; 转体; 北斗; 抗倾覆
在交通事业高速发展的今天,我国交通网络越来越趋于密集化和立体交叉化,跨越既有线修建桥梁将越来越多,转体施工由于其独特的优势被广泛应用。大型桥梁转体施工基本是围绕一个球铰转动,倾覆力矩通过球铰周边的滚动支撑平衡。转体过程中结构是不允许发生无组织运动的,甚至连微小侧向转动也需要受到严格控制。特别是对于高墩桥,即使一个很小的偏角,也可能使自重合力超出墩底截面核心,危及大桥安全。因此,控制偏角是保障桥梁安全不倾覆的有效方法[1-2]。
以往的研究,大多采用解析法或者结合有限元建模,比如马朝旭[3]采用弹性力学解析法和规范近似法计算了跨铁路连续梁平转施工时的球铰节点受力,并进行了Ansys有限元建模;车晓军等[4-5]研究了T型刚构桥转体过程抗倾覆性能,基于接触面竖向压力分布形态和球铰应力差提出了球铰失稳临界力矩近似公式和不平衡力矩理论计算公式;宋刚[6]在称重试验中提出了新的测试水平位移的方法,相比竖向位移可以消除黄油层竖向变形的影响,使临界力判断更准确。学者们对转体法施工的桥梁力学性能进行了理论和试验研究,但是并没有将其与现场施工监控相结合,提出倾覆发生的预警阈值。
北斗卫星导航系统作为桥梁监测的手段,可以得到监测点的空间三维坐标,目前主要运用于桥梁健康监测中水平变形量和垂直变形量的监测[7-10]。本文以实际工程项目为依托,在待转体梁段四个控制角点放置北斗信号接收器,根据其竖向坐标变化换算出桥墩偏角。在此基础上建立预警系统,实时发出安全预警,从而保证转体过程安全,也为同类桥梁的施工监控提供参考。
1 利用北斗信息换算偏角的原理
转体系统如图1所示分上下两部分,上转盘包括上部球铰和撑脚,下转盘包括下部球铰、环形滑道、千斤顶反力座和牵引反力座、承台等,通过钢销轴的连接定位两部分结合成一个完整的转体系统。实际转体过程中,由于球铰的制作误差、转体质量刚度不均匀、预应力偏差等不利的情况,结构重心会偏离球铰中心,倾斜一侧的撑脚与滑道接触发挥支撑作用,此时转体结构发生刚体位移,撑脚为倾覆支点。

图1 转体系统立面示意
通过在转体上部结构的四个控制角点布置GPS设备(图2中G1~G4所示)实现对桥梁转体空间状态实时监控,根据控制角点的空间三维坐标计算出桥体所在的真实位置和水平高度,由此反算出上部结构在转体过程中的倾角。然后通过设置相应的阈值,判断转体T构是否发生倾覆并实时预警。

图2 GPS设备布置示意
1.1 纵向倾覆
转体T构处于最大双悬臂状态,在转动过程中,由于两个臂展重量不均匀、两边牵引力不协调,或者其他原因造成的沿臂展方向受力不均衡,不均衡力将导致处于转动状态中的T构重心沿着悬臂伸长方向(纵向)漂移,一旦超出限值,将导致转体T构沿纵向发生倾覆(图3)。四个控制角点的坐标分别设为G1(X1,Y1,Z1)、G2(X2,Y2,Z2)、G3(X3,Y3,Z3)、G4(X4,Y4,Z4),由图3可知:

图3 纵向倾覆示意
(1)
式中:L1为纵桥向的臂展长度。由几何关系可知,倾覆角α′=α,即

(2)
式(2)表征了纵向倾覆时倾覆角与四个控制角点坐标值之间的换算关系。
1.2 侧向倾覆
在转动过程中,由于横向风作用,或者其他原因导致的横向受力不均衡,不均衡力将实时反馈给转体T构,直接影响是致使转体T构重心沿着横向漂移,一旦超出限值,将导致转体T构沿横向倾覆,由图4可知:

图4 横向倾覆示意
(3)
式中:L2为横桥向宽度。由几何关系可知,倾覆角α′=α,即

(4)
式(4)表征了横向倾覆时倾覆角与四个控制角点坐标值之间的换算关系。
2 预警阈值的确定
2.1 安全系数的确定
在实际施工过程中,考虑各种因素的不利影响后,为了保证安全,可适当设置一定的安全系数K,它是抗倾覆力矩与倾覆力矩的比值。为了简化计算,可假设重力合力作用点超出(球铰处)桥墩截面(准确地讲是桥墩与球铰接触面在水平面上的投影)核心即发生倾覆,因为此时截面内的力将重新分布,急剧向倾覆方向发展。倾覆发生时,桥墩紧贴着球面滑动,瞬心即球心,因此倾覆力矩即桥重G与偏心距e的乘积(图5)。
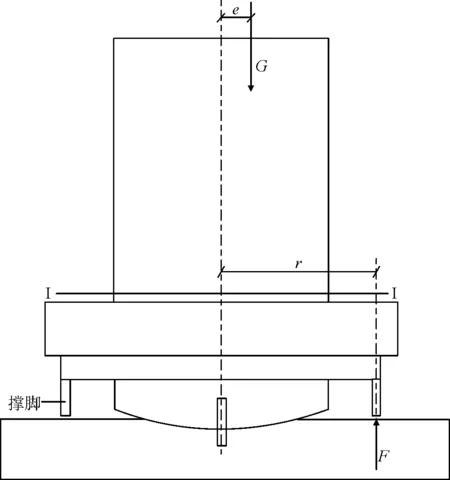
图5 转体结构受力示意
倾覆力矩:Me=G·e
抗倾覆力矩:MF=F·r
安全系数:

(5)

2.2 圆形接触面
转体结构上下球铰接触面一般选为圆形(图6)。

图6 圆形接触面示意
由于截面对于圆心是极对称的,因而截面核心边界对于圆心也应该是极对称的,所以圆形截面核心边界是一个半径为d/8的圆,即:


(6)
式中:d为上下球铰接触面的直径。

(7)
预警阈值即两边北斗垂直坐标读数差允许值,即:

(8)
式中:H是桥总重作用点高度,可近似取梁体重心到球铰顶点的高度,亦可近似取桥墩高度。
2.3 矩形控制面
在一些场合,比如截面较小的矩形墩身,需考虑墩身与上转盘交界面可能发生的破坏,并由此导致倾覆(图7)。

图7 矩形控制截面示意
(1)发生纵向(绕y轴)倾覆时,截面几何特性:



(9)
(10)
式中H含义同前。
(2)发生横向(绕x轴)倾覆时,可类似得出:
(11)
(12)
(3)预警阈值即两边北斗坐标读数差允许值,即:
(13)
式中:L为北斗信号接收器之间的距离,可近似取桥长L1或者桥宽L2。
3 工程实例分析
G108国道青白江段改扩建工程上跨北环达成铁路转体桥,与北环达成铁路线交角73.85°。其孔跨布置为2×45 m T构单幅桥,桥面纵坡2.55 %,桥面横坡为双向坡,最大坡度2 %,桥梁全长90 m。梁体采用变截面预应力混凝土箱梁,单箱四室截面,梁体根部梁高5.2 m,边支点处梁高为2.5 m,梁顶宽23 m,梁底宽18.5 m。转体重量为8 513 t,转体角度为76°,转体时间为50 min,转体角速度为0.025 rad/min。转体牵引设备采用2台200 t连续牵拉油缸,梁体连续千斤顶分别按水平、平行、对称的要求布置于转盘两侧,其中测试转体铰摩擦系数μs=0.007 73,动摩擦系数μd=0.005 69,每端的牵引力大小为71.65 kN。

表1 倾覆力矩验算

表2 最大允许偏角和Z坐标读数差允许值
通过表1和表2说明,在实际工程中,按式(5)、式(8)计算的安全系数,尚有很大的富余。本文假设重力合力作用点超出桥墩截面核心即发生倾覆也是偏于安全考虑,而对应的预警阈值也较大,实际测量精度很容易满足要求,可操作空间很大,可在此基础上以保证转体就位精度为严格限制条件,减小预警阈值的设定。
实际上,北斗民用信号竖向分辨率将是厘米级,由此可以算出表1中的安全系数分别是251和70,安全系数提高十倍乃至几十倍。对于大型工程,这一点尤为重要。
4 结论
(1)北斗民用信号开放是可以预期的,其精度将达到厘米乃至毫米级。考虑到大型T构桥梁的长度一般都较大,几十米到上百米,因此,可分辨的桥墩纵向倾角可达分(北斗精度厘米级)及秒(北斗精度毫米级)。这一点对高墩尤其重要,因为桥墩越高,重力作用点越容易超出截面核心。
假设桥长50 m,北斗精度1 cm,那么可分辨的偏角是:
(0.01/50)×(180/3.14)=0.011°=0.69′
假设桥长100 m,北斗精度1 mm,那么可分辨的偏角是:
(0.001/100)×(180/3.14)=0.00057°=2.06″
(2)在横向,可根据桥宽适当选择伸臂,增加接收器之间的距离,提高分辨率。
(3)北斗在桥梁监测中的应用相对于其他位移监测方法来说有自己的优势,首先是数字化传输,能够对超出桥梁允许的变形值进行报警,保障桥梁的安全运行。其次监测终端没有量程限制,可以长时间永久连续监测,不受各种天气影响。还有就是各个监测点之间不需要通视,这是一些常规监测手段譬如全站仪做不到的。
[1] 姚德新. 曲线桥梁测设中桥梁偏角计算方法的研究[J]. 兰州交通大学学报, 1997(1):16-19.
[2] 彭华. 几种控制薄壁空心墩偏位的方法[J]. 科技传播, 2013(14).
[3] 马朝旭. 客运专线跨铁路连续梁平转法施工力学特性分析研究[D]. 兰州交通大学, 2014.
[4] 车晓军, 张谢东. 大吨位T形刚构桥转体过程抗倾覆性能[J]. 中国公路学报, 2014, 27(8):66-72.
[5] 车晓军, 张谢东, 朱海清. 基于球铰应力差法的T构转体桥不平衡力矩预估[J]. 桥梁建设, 2014, 44(4):57-61.
[6] 宋刚. T形刚构桥水平转体施工控制及施工风险评估研究[D]. 长安大学, 2011.
[7] 席恩伟. 基于北斗/GPS与GIS的桥梁变形监测系统研究[D]. 云南大学, 2015.
[8] 程朋根, 李大军, 史文中,等. 基于GPS、GIS技术的桥梁结构健康监测与管理信息系统[J]. 公路交通科技, 2004, 21(2):48-52.
[9] 李宇航. 基于GIS的桥梁实时动态监测与分析系统[D]. 山东科技大学, 2014.
[10] 朱明非, 翁信文, 汪维,等. 基于GIS/GPS集成的变形监测预警系统设计[J]. 科技创新与生产力, 2016(4):109-110.
[11] 韩林海, 杨有福. 现代钢管混凝土结构技术[M]. 北京: 中国建筑工业出版社, 2007.
马福民(1966~),男,本科,高级工程师。
U445.465
B
[定稿日期]2017-02-19
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
电子技术与软件工程(2018年10期)2018-07-16
物理教学探讨(2018年1期)2018-02-13
电子科技(2016年12期)2016-12-26
系统工程与电子技术(2016年4期)2016-08-24
城市道桥与防洪(2015年3期)2015-03-20
现代企业(2015年2期)2015-02-28
电子设计工程(2014年17期)2014-02-27
都市快轨交通(2014年1期)2014-02-27