
多机电力系统非线性鲁棒STATCOM控制器设计
2017-07-07 14:47:21孙丽颖
辽宁工业大学学报(自然科学版) 2017年3期
赵 岩,孙丽颖
多机电力系统非线性鲁棒STATCOM控制器设计
赵 岩,孙丽颖
(辽宁工业大学 电气工程学院,辽宁 锦州 121001)
在系统受到内、外部干扰的条件下,针对含静止同步补偿器(STATCOM)的多机电力系统模型,采用改进backstepping方法、自适应控制以及滑模控制,设计一种非线性鲁棒控制器。在设计过程中,加入类函数对backstepping方法进行改进,加快了曲线的收敛速度。针对未知的干扰上界,应用自适应控制对其进行实时估计,并引入连续滑模项对其进行抑制。最后,通过两区域四机电力系统进行仿真研究。仿真结果表明,所设计的STATCOM控制器可以提高跨区域互联电力系统的稳定性能。
改进backstepping方法;滑模控制;自适应控制;STATCOM;多机电力系统
目前,我国电力系统已发展到大型乃至超大型跨区互联阶段,其优势在于使资源在最大程度上优化配置,与此同时,也伴随着电力系统的稳定性问题[1]。然而,静止同步补偿器(static synch ronous compensator, STATCOM)作为一种并联型FACTS装置,可以显著地提高电力系统的稳定性[2]。因此,选择一种合理且有效的控制策略,设计一种含STATCOM的多机电力系统稳定控制器,以使互联电网在故障时能够快速恢复,应该成为研究的重心。
电力系统是一个强非线性系统,采用非线性控制策略可以更好地发挥STATCOM控制器的性能。Backstepping方法是一种递归式的非线性设计方法,该方法只需要逐步设计虚拟控制量,控制器的设计过程十分简单且规范[3]。但是,实际运行的电力系统会受到许多不确定的因素影响,例如某些参数不能精确测量以及各种外部干扰等。若仅采用backstepping方法,控制器将不能发挥应有的效果。因此,文献[4]将backstepping方法和自适应控制相结合,并采用非线性2增益干扰抑制理论对外部干扰进行处理。文献[5]在文献[4]基础上,综合考虑暂态响应和控制器增益,通过引入类函数对backstepping方法进行改进,加快了系统收敛速度。文献[6]采用改进动态面控制和浸入和不变自适应控制,设计了一种非线性自适应鲁棒STATCOM控制器。但是,文献[4-6]只是将庞大的电力系统等效为单机无穷大系统进行研究,在模型的考虑上存在一定的不足。另外,滑模控制作为一种不连续控制方法,对含有外部干扰的电力系统可以发挥较强的鲁棒性[7]。近些年来,已经有许多学者开始应用自适应滑模控制处理含有外部干扰的系统,例如发电机励磁控制[8]、飞行器姿态控制[9]、永磁同步电机伺服系统控制[10]、燃料电池气体供应系统控制[11]、SVC暂态稳定性控制[12]等。但是,文献[8-12]都是设计一种含有符号函数的滑模项来抑制外部干扰,其缺陷是存在抖振现象。针对此问题,通过查找文献发现,文献[13]采用了一种范数型连续滑模项,可有效地避免符号函数引起的抖振问题。因此,本文将改进backste-pping方法[5]和自适应滑模控制[13]相结合,研究含有STATCOM的多机电力系统的稳定性控制问题。
综上所述,针对含STATCOM的多机电力系统,考虑阻尼系数的不确定性和系统受到的外部干扰,采用改进backstepping方法结合自适应控制和滑模控制,设计了一种含STATCOM的非线性鲁棒控制器。最后,选取两区域四机电力系统[14]进行仿真研究,仿真结果说明,STATCOM控制器对电力系统受到的大、小扰动都具有很好的暂态性能。
1 系统模型
研究装有STATCOM的两区域互联电力系统,如图1所示。将STATCOM装在互联输电线路的中间位置,这样可以更好地提高传输容量[15]。根据文献[15],把Area1和Area2分别等值为发电机G1和G2,则等值两机系统如图2所示。
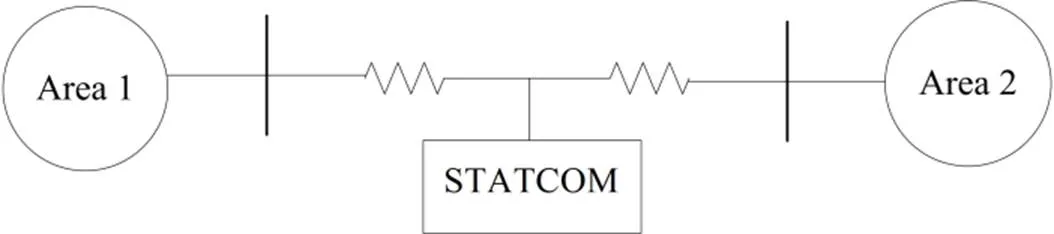
图1 装有STATCOM的两区域互联系统
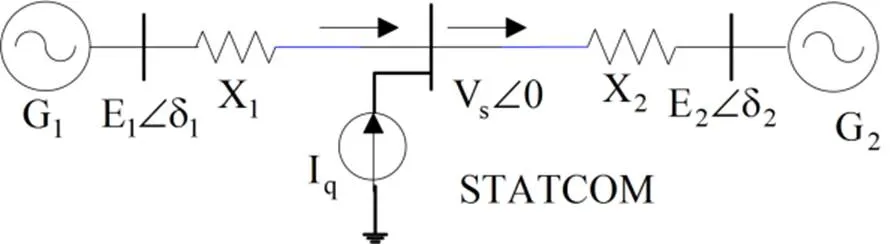
图2 装有STATCOM的等值两机系统
发电机选用隐极机,假设暂态电势E及输入机械功率P都是常数,其中=1,2。则,等值发电机的数学模型为[15]:

式中,δ为等值发电机的转子运行角,rad;ω为等值发电机的转子角速度,rad/s;H为等值发电机的转动惯量,s;D为等值发电机的阻尼系数;P为原动机输入机械功率;P为等值发电机的电磁功率;ω0为等值发电机的额定转子角速度,rad/s;其他无特殊说明的单位均为标幺值。
将STATCOM等效为可控电流源,则其一阶惯性环节为[15]:
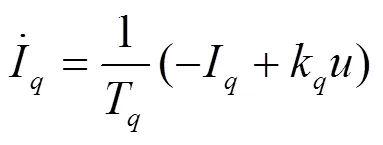
式中:T为时间常数;k为比例系数。
等值发电机的电磁功率为:
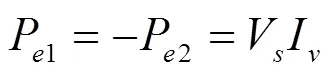
其中:


假设系统阻尼是均匀的[16],令,则系统(4)中的不确定部分转化为:
其中,1和2是系统受到的外部干扰。

控制目标:综合考虑阻尼系数的不确定性和不确定未知外部干扰,设计STATCOM的非线性鲁棒控制规律,无论系统受到大扰动还是小扰动,控制器都能使发电机的相对功角和相对转速恢复稳定。
2 控制器设计

(7)
令系统(5)的第一阶的Lyapunov函数为:

则1对于时间的导数为:
(9)







(14)


取反馈控制律为:
(17)
其中:

对2增广,得到系统(5)的Lyapunov函数为:
则,3对于时间的导数为:


(21)

在反馈控制律(17)的作用下,闭环系统的误差动态为:
由LaSalle’s定理[17]可知:对于系统(5),在反馈控制律(17)作用下,闭环系统(23)在平衡点附近是渐近稳定的,即。当时,,,,。并且,由,,的定义可知,,也是有界的。
3 仿真结果
为了检验所设计控制器的效果,对图3所示的含STATCOM的两区域四机电力系统[14]进行仿真。发电机的参数见文献[14],系统参数如下:
130=10°,10=30=314.159rad/s,1=2=3= 2,1= 1,1= 1,2= 15,1=2=2,1=2= 0.05。
近年来,随着社会的进步和人民生活水平的普遍提高,众多家庭都选择尽早让儿童接受音乐素养的培养。钢琴乃“乐器之王”,许多家长都为儿童选择学习钢琴来培养音乐素养,这确实对儿童身心发展起着良好的促进作用。但由于盲目的跟风和一味追求考级,导致儿童的钢琴学习走向了功利性的另一极端。儿童钢琴的学习不应以考级为目的,也不应单纯地追求技术,而应以获取审美体验、愉悦身心为其学习目标。
在图4~图7中,分别采用以下3种控制策略进行仿真研究:(1)考虑类函数的改进自适应backstepping滑模控制,简称为IAbSM;(2)本文采用的自适应backstepping滑模控制,简称为AbSM-Ⅰ;(3)含有符号函数的自适应backstepping滑模控制,简称为AbSM-Ⅱ。

图3 含STATCOM的两区域四机系统
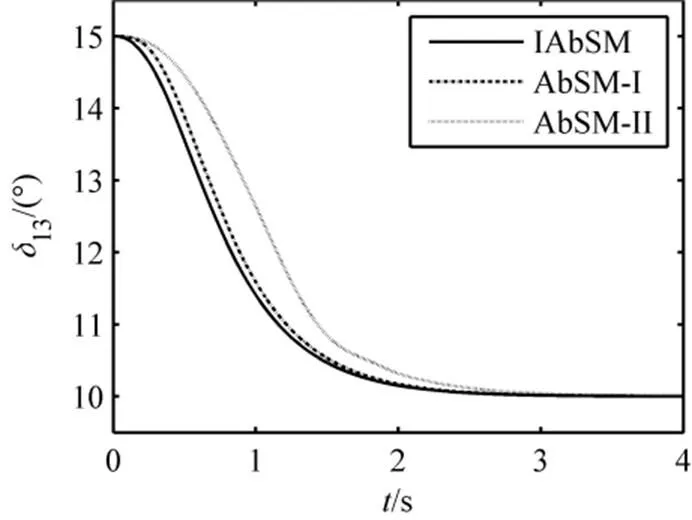
图4 G1相对于G3功角响应曲线
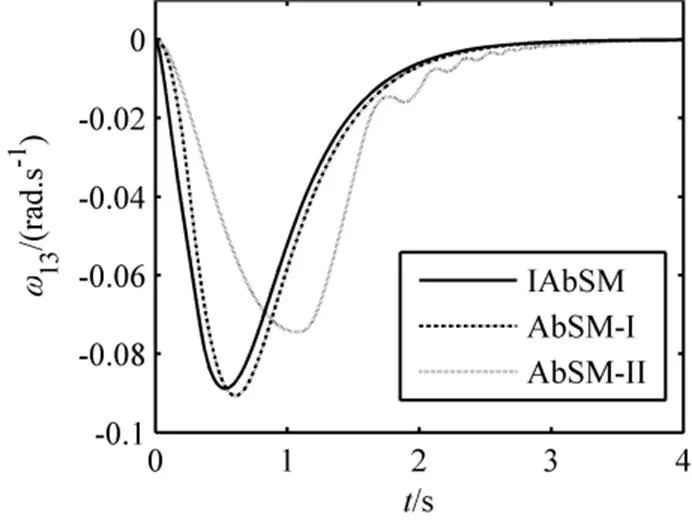
图5 G1相对于G3转速响应曲线

图6 G1相对于G3功角响应曲线

图7 G1相对于G3转速响应曲线
从图4~图7可以看出,采用如上3种控制策略都能使受扰动系统恢复原来的稳定状态。对比AbSM-Ⅰ算法和AbSM-Ⅱ算法可以发现,当采用AbSM-Ⅰ算法时,得到的曲线更平滑,没有抖振现象,并且收敛速度更快,超调量也小。另外,当采用IAbSM算法时,由于类函数的引入,曲线的收敛速度将进一步加快。从图6和图7还可以看出,采用IAbSM算法时,曲线的幅值将缩小50%左右。因此,如果IAbSM算法设计控制器,可以缩短故障时间,减少财产和能源损失,具有一定的工程实际应用意义。
4 总结
针对含STATCOM的多机电力系统,将其等值为两机系统建立数学模型,并且考虑阻尼系数的不确定性和外部干扰,采用改进backstepping方法、自适应控制以及滑模控制,设计一种非线性鲁棒STATCOM稳定控制器。在设计过程中,加入类函数对backstepping方法进行改进,加快了曲线的收敛速度。针对干扰上界未知的情况,应用自适应控制对其实时估计,并引入连续滑模项对其进行抑制。仿真结果表明,所设计的STATCOM控制器可以改善跨区域互联电力系统的稳定性。
[1] 周双喜, 苏小林. 电力系统小干扰稳定性研究的新进展[J]. 电力系统及其自动化学报, 2007, 19(2): 1-8, 34.
[2] 李世芳, 王杰. 含STATCOM装置的凸极式发电机励磁稳定控制设计[J]. 电工技术学报, 2011, 26(7): 173-180.
[3] 蔡建平. 基于Backstepping方法的不确定非线性系统鲁棒自适应控制[D]. 杭州: 浙江大学, 2014.
[4] 李文磊, 井元伟, 刘晓平, 等. 基于自适应逆推设计的STATCOM非线性鲁棒控制[J]. 东北大学学报: 自然科学版, 2003, 24(3): 221-224.
[5] 孙丽颖, 冯佳昕, 赵军. STATCOM的非线性鲁棒控制器设计[J]. 东北大学学报: 自然科学版, 2009, 30(4): 466-470.
[6] Li Wen-Lei, Li Ming-Ming. Nonlinear Adaptive Robust Control Design for Static Synchronous Compensator Based on Improved Dynamic Surface Method[J]. Interna--tional Journal of Automation and Computing, 2014, 11(3): 334-339.
[7] 邹德虎, 王宝华. 多机电力系统自适应鲁棒Terminal滑模励磁控制[J]. 电力自动化设备, 2010, 30(12): 79-82.
[8] 余向阳, 南海鹏, 余娟, 等. 自适应积分逆推滑模励磁控制研究[J]. 中国电机工程学报, 2009, 29(10): 74-77.
[9] 丛炳龙, 刘向东, 陈振. 一种改进的自适应滑模控制及其在航天器姿态控制中的应用[J]. 控制与决策, 2012,27(10): 1471-1476.
[10] 付培华, 陈振, 丛炳龙, 等. 基于反步自适应滑模控制的永磁同步电机位置伺服系统[J]. 电工技术学报, 2013, 28(9): 288-293, 301.
[11] 佃松宜, 吴璋, 蒲明. 固体氧化物燃料电池气体供应系统的自适应滑模控制[J]. 四川大学学报: 工程科学版, 2014, 46(5): 148-155.
[12] 王曦, 王渝红, 李兴源, 等. 考虑模型不确定性和时延的静止无功补偿器自适应滑膜控制器设计[J]. 物理学报, 2014, 63(23): 428-435.
[13] 朱凯, 齐乃明, 秦昌茂. BTT导弹的自适应滑模反演控制设计[J]. 宇航学报, 2010, 31(3): 769-773.
[14] Kunder P. Power system stability and control[M]. New York: McGraw-Hill , 1994.
[15] 王文聪, 梅生伟, 刘锋. 区域间联络线上的STATCOM的鲁棒控制器设计[J]. 清华大学学报: 自然科学版, 2004, 44(4): 433-437.
[16] 倪以信, 陈寿孙, 张宝霖. 动态电力系统的理论和分析[M]. 北京: 清华大学出版社, 2002.
[17] 朱义胜,董辉,李作洲. 非线性系统[M]. 3版. 北京: 电子工业出版社, 2011.
责任编校:孙 林
Design of Nonlinear Robust Controller for Multi-Machine Power System with STATCOM
ZHAO Yan, SUN Li-ying
(Electrical Engineering College, Liaoning University of Technology, Jinzhou 121001, China)
For the Multi-Machine power system with STATCOM, under the condition of internal and external disturbance, a nonlinear robust controller is designed by using the improved backstepping method, adaptive control and sliding mode control. In the design process, the-class function is added to improve the backstepping method, which accelerates the convergence speed of the curve. For the case that the upper bound of the disturbance is unknown, the adaptive control is used to estimate the adaptive law, and the continuous sliding mode term is introduced to suppress the interference. At last, simulation research was carried out through the two-area four-machine power system. The simulation results show that the designed STATCOM controller can improve the stability of the interconnected power system.
improved backstepping method; sliding mode control; adaptive control; STATCOM; multi-machine power system
10.15916/j.issn1674-3261.2017.03.001
TP273
A
1674-3261(2017)03-0141-05
2016-08-29
辽宁省自然科学基金项目(2015020076)
赵 岩(1992-),男,河北迁安人,硕士生。孙丽颖(1972-),女,辽宁抚顺人,教授,博士。
猜你喜欢
防爆电机(2020年5期)2020-12-14 07:03:50
自动化学报(2019年6期)2019-07-23 01:18:22
电子测试(2018年15期)2018-09-26 06:01:04
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
自动化学报(2016年8期)2016-04-16 03:38:51
电测与仪表(2016年14期)2016-04-11 12:33:08
西北工业大学学报(2015年1期)2016-01-19 03:29:56
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:35
