
自动补苗装置精准定位自适应模糊PID控制
2017-06-27 01:31刘姣娣曹卫彬许洪振田东洋焦灏博欧阳异能
农业工程学报 2017年9期
刘姣娣,曹卫彬,许洪振,田东洋,焦灏博,欧阳异能
自动补苗装置精准定位自适应模糊PID控制
刘姣娣1,2,曹卫彬1※,许洪振3,田东洋1,焦灏博1,欧阳异能4
(1. 石河子大学机械电气工程学院,石河子 832000; 2. 重庆大学机械传动国家重点实验室,重庆 404100; 3. 新疆天业股份有限公司,石河子 832000; 4. 石河子大学理学院,石河子 832000)
为实现补苗装置精准定位控制,解决自动移栽作业过程中因穴盘缺苗和取苗投苗失败而导致的漏栽问题,采用自适应Fuzzy-PID 控制算法来实现钵苗输送的步进定位控制。构建了步进电机角速度控制传递函数的数学模型,设计了自适应 Fuzzy-PID控制器及其模糊规则,通过MATLAB的Simulink模块建立了基于模糊PID控制器的步进电机系统角速度控制模型,以阶跃信号作为激励信号,自适应模糊PID控制和PID控制的仿真试验表明:PID控制的响应时间为7 s,出现超调量为0.1的振荡,通过调整PID控制器参数增大比例系数,系统响应时间缩短为2.2 s,系统响应速度明显加快,且未出现振荡环节;自适应模糊 PID 的响应时间为 0.12 s,步进电机系统快速到达阶跃响应的稳态值,步进电机角速度控制稳定,角速度响应快,满足钵苗输送的定位要求。自动补苗试验结果表明:在植苗频率为40、50与60株/min时,补苗成功率分别为100%,100%、95.8%,且只要光纤传感器检测到漏苗信号,基于自适应Fuzzy-PID控制的步进电机系统快速响应,补苗控制系统都能准确及时地进行自动补苗。该研究可为解决自动移栽机田间作业的漏栽问题提供参考。
农业机械;试验;控制;自动补苗;定位控制
0 引 言
穴盘苗自动移栽机取苗方式主要有2种:一是通过取苗针从穴盘中夹取出钵苗,并投入到栽植器中;另一种是通过顶杆顶出钵苗,并将钵苗输送到栽植器中。这2种取苗方式都会存在移栽漏苗现象,主要是因为:1)育苗穴盘穴格本身缺苗造成空取苗现象;2)取苗过程中取苗夹片夹碎钵体,无法将钵苗成功夹取进行投苗,顶杆式取苗机构顶出位置错位,无法将钵苗从穴格中顶出;3)植苗机构与取苗机构运动配合不稳定,造成取苗机构投苗失败[1]。
目前研究集中在对穴盘缺苗进行识别,利用机器视觉系统检测穴孔中的钵苗是否存在和是否健康钵苗,计算出最佳的移栽路径来引导末端执行器移栽钵苗,以降低移栽漏栽率。Vol[2]利用机器视觉系统检测穴盘钵苗移钵作业质量;Tai等[3]开发了一种机器视觉移钵系统提高穴盘钵苗移栽的质量,对16种不同的作物进行试验,检测空穴孔的准确率可达95%;蒋焕煜等[4-5]开发了适用于穴盘钵苗健康状态信息检测和温室内钵苗移栽的软、硬件系统,利用机器视觉技术获取穴盘钵苗的健康信息;金鑫[6]开发了自动识别取苗系统对幼苗茎杆进行识别,判断穴盘穴格有无苗,指导供苗机构进行取苗动作;王侨等[7]基于Fuzzy-PID控制理论对苗盘的步进输送定位控制。国内研究基本是利用机器视觉技术来检测苗盘,对苗盘缺苗进行检测,解决因苗盘穴格本身缺苗造成空取苗的漏栽问题。但实际移栽作业中,漏栽还会因为取苗针夹持穴盘苗钵体失败和投苗失败而产生。
本文针对自动移栽机产生漏栽的原因,设计一套架构于自动移栽机的自动补苗装置[8],对自动移栽机补苗装置的补苗定位控制进行了系统分析和研究,对比于移栽机控制系统中常见的简单的闭环定位控制,提出自适应Fuzzy-PID控制算法,以达到精准补苗的目的。
1 自动补苗工作原理与控制要求
1.1 自动补苗装置组成及工作原理
基于苗钵力学特性试验和取苗植苗机构理论与参数仿真优化分析的基础上[1,9],设计自动补苗系统,该系统不仅要实现对取苗机构是否成功取苗、投苗进行自动准确检测,同时能够实现补苗装置精准定位控制,解决自动移栽作业过程中因取苗、投苗失败而导致的漏栽问题。
本文基于石河子大学研制的2ZXM-2全自动膜上移栽机[10],在移栽机上架构的自动补苗装置如图1所示,主要由移栽机机架1、补苗系统2、斜置隔板3、钵苗输送带4、取苗机构5、苗盘输送装置6、取苗检测系统7、栽植机构8组成。钵苗输送带的斜置隔板上有预先放置好的健康钵苗。取苗检测系统的光纤传感器选择信号稳定、受干扰小的日本OMRON公司生产的欧姆龙E3X-DAC11-S 2M与E32-ZD200 2M组合,调整光纤传感器的安装位置,使其对准取苗机械手松开投苗的位置点,确保能准确检测到取苗机械手是否成功取苗和投苗。移栽作业过程中,取苗检测系统对取苗机械手的取苗、投苗状况进行检测。当检测到取苗机械手取投苗失败时,与该取苗机械手对应的步进电机驱动器控制步进电机转动,供苗输送带向前运动一定的距离,斜置隔板向前移动一格,当取苗机械手进行放苗这个动作时,同时放置于斜置隔板上的健康苗进行滑落,并落入植苗鸭嘴,代替取苗机械手完成投苗。当连续多次检测到取苗机械手取投苗失败,补苗装置也执行连续多次补苗,实现取苗、投苗适时检测并及时准确补苗的功能[8,11-12]。
1.2 补苗装置定位控制要求
补苗装置步进电机位置控制精度直接影响补苗装置工作效果,补苗装置架构直接由传动带带动。每当检测到漏苗时,步进电机旋转指定角度,传送带上秧苗向前运动指定距离,最后秧苗植入土壤中,实现适时补苗功能。为保证补苗时间和正常栽苗时间一致,则需要在检测到有漏苗情况时,补苗装置立刻开始进行补苗。
在正常栽苗时,设栽植鸭嘴从接苗到完成植苗的总耗时为,秧苗落入栽植嘴到完成栽植的正常输送时间1=0.38 s,秧苗从投苗点落入鸭嘴的时间,其中为取苗机械手投苗位置点到鸭嘴的高度且=90 mm,即可得,故总耗时=1+2=0.51 s。
补苗装置补苗耗时包括以下4部分:1)为防止移栽作业中钵苗落入栽植鸭嘴外,钵苗输送带上的隔板设计成槽形,使其具有将钵苗向栽植鸭嘴导入的作用,且通过试验确定钵苗输送带运行时,隔板间放置的钵苗能准确落入栽植鸭嘴的落苗点位置。钵苗从输送带的落苗点落入鸭嘴的时间1b,钵苗输送带落苗点到鸭嘴的高度1=400 mm,即可得;2)光纤传感器检测到漏苗并反馈信息所用时间2b=0.01 s;3)各元件反馈时间及滞后时间3b=0.01 s;4)钵苗输送带传送秧苗时间,即钵苗输送带运动1个隔板间距所用时间4b=−1b−2b−3b=0.21 s,输送带2个隔板之间间距为80 mm,可求得输送带平均速度b=0.38 m/s;由于步进电机和输送带之间采用联轴器直联进行传动,其中输送带滚筒直径为80 mm,故可得步进电机平均角速度b=4.75 rad/s,单纯通过控制步进电机转动,以控制传送带运动路程,并不能保证每次都与取苗机械手投苗及栽植鸭嘴送苗植苗的总耗时0.51 s一致,即在0.51 s内完成补苗,可能会存在时间偏差,因为单纯控制步进电机运动圈数(对应传送带运动路程)无法控制时间;但如果以步进电机运动角速度作为控制量,以步进电机平均角速度b为步进电机角速度控制的预期值,即可保证步进电机在指定时间内运动指定角位移。
2 钵苗输送的步进定位控制算法
2.1 两相混合式步进电机建模
本文采用步进电机型号为86BYG250-H,为两相混合式,混合式步进电机结合了永磁式和反应式步进电机优点,转矩可调范围大、噪音小,广泛应用于高精度伺服控制系统中,是目前应用及其广泛的电机[13]。为构建步进电机控制系统模型,在建立步进电机数学模型时忽略涡流损耗和磁滞效应,端部漏磁的情况忽略不计,得到步进电机电压平衡方程如式(1)所示[14]。

式中a、b、a、b分别对应步进电机的A、B相电压和实时工作电流;a、b为电机的内部A、B相线圈绕组电阻,Ω;aa、ab、bb、ba对应电机两相A、B的自感和互感值;N为电机转子齿数;为极距角,(°);T为反电势系数;为电机转速,r/min;为旋转角度,(°);为时间,s。同时根据步进电机内部结构运动,可得电机运动平衡方程如(2)所示[15]。
(2)

式中为电机转轴转动惯量,kg/cm2;e为电机电磁转矩,N·m;为电机的粘滞摩擦系数;L为负载转矩,N·m。与传统的直流电机相比较,步进电机内部工作过程较为复杂,假设在实际控制中,以步进电机角位移为控制量,0为目标值,1为控制量,且有角度偏差Δ=1−0,角度偏差值为0时,则控制结果最优,此时步进电机转子达到一个平衡位置。设电机两相A、B初始预期工作电流为0,也就是两相中心λ/2处,以下将按照以上假设条件和方程推导步进电机数学模型[16],则有
(4)
根据式(2)~式(4),可得出

假设负载转矩L=0,且有极距角=0,则上式可简化为
(6)
对式(6)两边求一阶倒数,可得到式(7)

(8)

可得到步进电机角速度控制传递函数()。
(10)
将步进电机参数代入式(10),可得步进电机角速度控制传递函数如式(11)所示。
2.2 模糊PID控制系统组成与定参数PID控制
步进电机反馈控制中,角速度采用编码器采集,其反馈控制系统框图如图2所示。控制系统输入为步进电机预期角速度b,输出为实际角速度s,控制器为模糊PID控制器,为预期角速度与实际角速度之差值,为差值变化率。为了提高模糊控制器的实时性,故采用二维模糊控制器,以和为模糊控制器输出,以PID 3个系数调整量为输出,即ΔK,ΔK和ΔK,考虑常规离散PID控制器如式(12)所示;其中()为离散的角速度偏差值,K、K和K分别为常规的PID控制器的3个系数,即比例系数,积分系数和微分系数。常规PID以步进电机角速度偏差作为输入,在微分环节中对偏差做了微分运算,考虑了步进电机控制偏差变化率,即对步进电机角速度变化做了一定的预测,但由于PID控制器参数固定,当系统出现较大扰动时可能出现长时间的振荡,而自适应模糊PID控制器可根据被控量及环境变化适时调整PID参数,实现对PID控制参数的在线自整定,进而提高控制系统的定位精度以及稳定性[17-20],设计其控制律如式(13)所示。

(13)
式中pus、ius、dus分别为PID控制器系数初值,模糊控制器根据二维输入信号,实时输出PID控制器系数调整值ΔK,ΔK和ΔK,动态调整的PID控制器系数可使系统快速达到稳态值附近,且减小响应的振荡[21]。
2.3 输入输出量模糊分布
模糊控制器的核心为制定合理有效的模糊规则,经大量试验得到模糊控制器的输入量和的论域为:1)步进电机角速度偏差∈[−0.75,0.75],cm,由于输送带负载较小,步进电机角速度波动幅值较小;2)步进电机角速度偏差变化率∈[−1,1],单位cm/s,同时由于输送带负载为秧苗,负载力较小,步进电机速度偏差较小。
用7个模糊子集涵盖角速度偏差:正大(PB)、正中(PM)、正小(PS)、零(O)、负小(NS)、负中(NM)和负大(NB);量化因子1=4。用3个模糊子集涵盖步进电机角速度偏差变化率:正(PS)、零(O)、负(NS);量化因子2=1。用5个模糊子集涵盖系数调整值ΔK:正大(PB)、正小(PS)、零(O)、负小(NS)和负大(NB);用于涵盖输入量ΔK的论域[−3,3]。用5个模糊子集涵盖系数调整值ΔK:正大(PB)、正小(PS)、零(O)、负小(NS)和负大(NB);用于涵盖输入量ΔK的论域[−2,2]。用5个模糊子集涵盖系数调整值ΔK:正大(PB)、正小(PS)、零(O)、负小(NS)和负大(NB);用于涵盖输入量ΔK的论域[−3,3]。可得模糊控制器输出量的比例因子Δ、Δ和Δ分别为1.5、1和1.5。
2.4 模糊规则设计
模糊控制器的规则一般可通过专家经验归纳总结得出或通过对系统进行测试输入输出得到[22-23],根据专家经验和大量试验得到角速度偏差、偏差变化率与ΔK,ΔK和ΔK之间存在下列最优调整关系:
1)基本规则1:当角速度偏差较大时,角速度偏差变化率较大时,增大K以加快响应速度;减小K以防止超范围控制;同时可减小K以减小超调。
2)基本规则2:当角速度偏差中等大小时,角速度偏差变化率中等大小时,取较小K以减小超调;适当增加ΔK,但是不能增加过多;此情况下K作用最明显,可适当增大,以放大K的调整作用。
3)基本规则3:当角速度偏差较小时,角速度偏差变化率较小时,增大K、K以保证系统稳定性;适当减小K以减小系统在稳态值附近振荡。
根据上述3个基本规则,每组输入变量分别有7个、5个模糊子集,得到对应模糊规则,即可得ΔK,ΔK和ΔK模糊控制规则表如表1所示。模糊控制器解模糊采用重心法,将模糊控制移植到补苗系统处理器时,需通过MATLAB产生对应输出量的模糊规则表,即将模糊规则转化成处理器可直接理解并处理的数字量,处理器按照查表形式获取模糊输出,以此进行PID参数的在线调整[24-26]。
取模糊控制参数初值为pus、ius、dus,故有模糊控制参数pfuzzy、ifuzzy与dfuzzy如式(14)。


表1 PID调整参数ΔKP、ΔKi及ΔKd模糊控制规则表
3 基于Simulink的模糊PID控制器仿真
3.1 PID Simulink仿真模型建立
通过MATLAB的Simulink仿真模块可以离线有效的整定适用于被控对象的PID参数,能有效提高控制系统控制器设计效率[27-28]。针对建立的步进电机系统模型,在Simulink仿真中建立钵苗输送带步进电机的PID控制仿真模型如图3所示,以幅值为1的阶跃信号输入系统,采用PID控制器实现步进电机角速度的反馈控制,此时PID控制器3个参数分别为比例系数K=6,微分系数、K=5,积分系数K=3。在实际控制中,比例系数越大,则系统越灵敏,但当补苗系统负载突然变化,即出现干扰时,较大的比例系数可使系统快速调整回稳态值,而积分系数影响系统稳定性。
由于积分环节累积控制系统的误差,该环节可有效的减小被控系统稳态误差,但该系数越大,系统的振荡次数越多;微分环节可有效的对系统误差做简单预测,调整超调量,微分系数越大,则超调量越小[29-30]。当PID控制器系数K、K、K分别为6、5、3时,步进电机控制系统输出如图4a所示,系统通过阶跃信号激励时,系统响应较慢,并且出现超调量为0.1的振荡,响应时间为7 s。调整PID控制器参数且设置其参数K、K、K分别为20、5、3,得到系统输出如图4b所示,增大比例系数之后,系统响应速度明显加快,且未出现振荡环节,但由于PID控制器参数是离线调整的,当系统负载突变,且补苗系统工作环境较为复杂,容易出现各种干扰,当干扰出现时可能导致系统无法快速的调整到稳态值,按照图4b中PID系数时,系统响应时间为2.2 s,相比于图4a中PID控制器,该系数调整提高了系统响应速度。
3.2 Fuzzy-PID Simulink仿真分析
基于设计的模糊PID控制器,在MATLAB的Simulink仿真中建立仿真模型,实现PID参数自动调整。基于Fuzzy-PID的Simulink仿真如图5所示,FIS系统需要在Fuzzy Toolbox中预先建立好,同时根据PID Simulink仿真分析结果建立PID控制器系数K、K、K分别为20、5、3,根据模糊推理系统得到PID控制器参数的调整值,以阶跃信号为输入信号激励系统,步进电机控制系统输出如图6所示,系统响应时间为0.12 s,且不出现振荡,迅速达到稳态值。与传统PID控制器相比较,采用模糊PID控制有效提高了系统响应速度,当补苗装置负载突变或者步进电机预期速度值变化时,步进电机可快速响应以满足补苗时间与正常栽苗时间一致的需求。
4 补苗试验
穴盘自动补苗试验于2016年7月年5日至8日进行(图7)。试验用苗选择新疆142团育苗公司培育的辣椒穴盘苗,为提高移栽机取苗、植苗成功率,试验选取“红线8号”辣椒穴盘苗,育苗基质体积配方比例为泥炭∶蛭石=2∶1,育苗时间为60 d,幼苗平均株高为161 mm[1]。预先选出3盘穴盘苗,穴盘苗出苗率大于95%,为了检测漏苗补苗系统的工作性能,对每盘苗进行预先处理,使每盘苗在行列随机位置上缺苗,并且缺苗株数也随机。通过手动调整变频器,模拟田间作业速度变化,测试补苗作业效果如表2,其中漏苗检测成功率如式(15),补苗成功率如式(16)。
(16)
式中为补苗数,株;为漏苗数,株;=穴盘缺苗株数+取苗投苗失败株数,J为检测到的漏苗数,株。
试验使用的2ZXM-2全自动膜上移栽机实际植苗频率在40~60 株/min,钵苗移栽田间试验表明,当植苗频率超过60 株/min时,存在取苗机械手与栽植鸭嘴配合误差,加大了漏苗率,当栽植频率低于40 株/min时,栽植效率低且同时会使移栽钵苗的株距过大。因此,在补苗试验中,控制移栽机的栽植频率在40~60 株/min,选择3种栽植频率(40、50、60 株/min)的补苗试验结果分析如表2,当栽植频率为40和50株/min,漏苗检测成功率与补苗成功率都高达100%,而当栽植频率提高到60株/min时,由于取苗针的取苗速度变快,存在光纤传感器漏苗检测失败现象,48 株漏苗,有2株未检测到,造成了漏苗检测成功率与补苗成功率都是95.8%,但是只要是光纤传感器检测到漏苗信号,补苗控制系统都能准确及时地进行自动补苗。
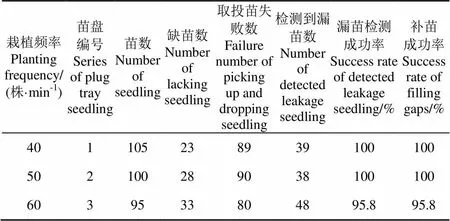
表2 补苗试验结果
5 结 论
1)为保证补苗时间和正常植苗时间一致,实现自动补苗装置适时准确补苗,考虑到自动补苗的定位精度要求高以及补苗系统负载变化,且补苗系统工作环境较为复杂,干扰因素多且存在不确定性,论文采用自适应Fuzzy-PID 控制实现自动补苗系统精准定位控制。
2)设计了自适应Fuzzy-PID控制器,建立了基于模糊PID控制器的步进电机系统角速度控制模型,以阶跃信号作为激励信号,仿真试验表明,PID控制的响应时间为7 s,出现超调量为0.1的震荡,通过调整PID控制器参数增大比例系数,系统响应时间缩短为2.2 s,系统响应速度明显加快,且未出现振荡环节;自适应模糊 PID 的响应时间为0.12 s,步进电机系统快速到达阶跃响应的稳态值,步进电机角速度控制稳定,角速度响应快,满足钵苗输送的定位要求。
3)自动补苗试验结果表明:在栽植频率为40、50、60株/min时,补苗成功率分别为100%,100%、95.8%,均达到较高的补苗成功率,且只要是光纤传感器检测到漏苗信号,基于自适应Fuzzy-PID控制的步进电机系统快速响应,补苗控制系统都能准确及时地进行自动补苗。本文采用自适应Fuzzy-PID控制算法来实现钵苗输送的步进定位控制,为解决自动移栽机田间作业的漏栽问题提供了参考。
[1] 刘姣娣,曹卫彬,田东洋,等. 基于苗钵力学特性的自动移栽机执行机构参数优化试验[J]. 农业工程学报,2016,32(16):32-39.
Liu Jiaodi, Cao Weibin, Tian Dongyang, et al. Optimization experiment of transplanting actuator parameters based on mechanical property of seedling pot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(16): 32-39. (in Chinese with English abstract)
[2] Vol N. Machine vision assisted robotic seedling transplanting[J]. Transactions of the Asae, 1994, 37(2):661-667.
[3] Tai Y W, Ling P P, Ting K C. Machine vision assisted robotic seedling transplanting[J]. Transactions of the Asae, 1994, 37(2): 661-667.
[4] 蒋焕煜,施经挥,任烨,等. 机器视觉在幼苗自动移钵作业中的应用[J]. 农业工程学报,2009,25(5):127-131.
Jiang Huanyu, Shi Jinghui, Ren Ye, et al. Application of machine vision on automatic seedling transplanting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(5): 127-131. (in Chinese with English abstract)
[5] 童俊华,蒋焕煜,武传宇. 基于贪心算法的温室钵苗稀植移栽路径优化[J]. 农业机械学报,2016,47(3):8-13.
Tong Junhua, Jiang Huanyu, Wu Chuanyu. Optimization of transplanting path based on greedy algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 8-13. (in Chinese with English abstract)
[6] 金鑫. 蔬菜穴盘苗自动移栽技术与装置的研究[D]. 北京:中国农业大学,2014.
Jin Xin. Research on Automatic Transplanting Technology and Device for Vegetable Plug Seedling[D]. Beijing: China Agricultural University, 2014. (in Chinese with English abstract)
[7] 王侨,曹卫彬,张振国,等. 穴盘苗自动取苗机构的自适应模糊PID定位控制[J]. 农业工程学报,2013,29(12):32-39.
Wang Qiao, Cao Weibin, Zhang Zhenguo, et al. Location control of automatic pick-up plug seedlings mechanism based on adaptive fuzzy-PID[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(12): 32-39. (in Chinese with English abstract)
[8] 刘姣娣,田东洋,曹卫彬,等. 一种自动移栽机的补苗装置:CN105794373A[P].2016-07-27.
[9] 赵匀. 农业机械分析与综合[M]. 北京:机械工业出版社,2008.
[10] 曹卫彬,李树峰,赵宏政,等. 一种全自动铺膜覆土移栽机:CN105027775A[P]. 2015-11-11.
[11] Liu Jiaodi, Cao Weibin, Tian Dongyang, et al. Kinematic analysis and experiment of planetary five-bar planting mechanism for zero-speed transplanting on mulch film[J]. Int J Agric & Biol Eng, 2016, 9(4): 84-91.
[12] 李华,曹卫彬,李树峰,等. 辣椒穴盘苗自动取苗机构运动学分析与试验[J]. 农业工程学报,2015,31(23):20-27.
Li Hua, Cao Weibin, Li Shufeng, et al. Kinematic analysis and test on automatic pick-up mechanism for chili plug seedling[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(23): 20-27. (in Chinese with English abstract)
[13] 宋受俊,刘景林,韩英桃,等. 二相混合式步进电机驱动器的优化设计[J]. 电气传动,2006,36(2):59-64.
Song Shoujun, Liu Jinglin, Han Yingtao, et al. Design of 2-phase hybrid stepping motor driver[J]. Electric Drive, 2006, 36(2): 59-64. (in Chinese with English abstract)
[14] 刘川,刘景林. 基于Simulink仿真的步进电机闭环控制系统分析[J]. 测控技术,2009,28(1):44-49.
Liu Chuan, Liu Jinglin. Analysis of stepper motor close-loop control based on simulink[J]. Measurement & Control Technology, 2009, 28(1): 44-49. (in Chinese with English abstract)
[15] Tanaka K, Wang H O. Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality Approach[M]. John Wiley &Sons Inc., 2001.
[16] Tanaka K, Hori T, Wang H O. A multiple Lyapunov function approach to stabilization of fuzzy control systems[J]. IEEE Transactions on Fuzzy Systems, 2003, 11(4): 582-589.
[17] Feng G. A survey on analysis and design of model-based fuzzy control systems[J]. IEEE Transactions on Fuzzy Systems, 2006, 14(5): 676-697.
[18] Gang L, Mcginnity T M, Prasad G. An approach for on-line extraction of fuzzy rules using a self-organising fuzzy neural network[J]. Fuzzy Sets & Systems, 2005,150(2): 211-243.
[19] Harb A M, Smadi I A. An approach to fuzzy control for a class of nonlinear systems: Stability and design issues[J]. International Journal of Modelling & Simulation, 2005, 25(2): 106-111.
[20] Sugeno M. Industrial Applications of Fuzzy Control[M]. Sole Distributors for the USA and Canada, Elsevier Science Pub.Co, 1985.
[21] 李庆春,沈德耀. 一种PID模糊控制器(fuzzy PI+fuzzy ID型)[J]. 控制与决策,2009,24(7):1038-1042.
Li Qingchun, Shen Deyao. Brand-new PID fuzzy controller ( fuzzy PI+fuzzy ID)[J].Control and Decision, 2009, 24(7): 1038-1042. (in Chinese with English abstract)
[22] Park D, Kandel A, Langholz G. Genetic-based new fuzzy reasoning models with application to fuzzy control[J]. IEEE Transactions on Systems Man & Cybernetics, 1994, 24(1): 39-47.
[23] Tanaka K, Sugeno M. Stability analysis and design of fuzzy control systems[J]. Fuzzy Sets & Systems, 1992,45(2): 135-156.
[24] Rubaai A, Castro-Sitiriche M J, Ofoli A R. Design and implementation of parallel fuzzy PID controller for high- performance brushless motor drives an integrated environment for rapid control prototyping[J]. IEEE Transactions on Industry Applications, 2008, 44(4): 1090-1098.
[25] Wang L X. Stable adaptive fuzzy control of nonlinear systems[J]. IEEE Transactions on Fuzzy Systems, 1992, 1(2): 146-155.
[26] Xie X, Su B, Chu X, et al. Stable adaptive fuzzy control of nonlinear systems[J]. Journal of Qufu Normal University, 1998(4): 14-20.
[27] 董全成,冯显英. 基于自适应模糊免疫PID的轧花自动控制系统[J]. 农业工程学报,2013,29(23):30-37.
Dong Quancheng, Feng Xianying. Cotton-gin automation by using adaptive fuzzy immune PID controller[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(23): 30-37. (in Chinese with English abstract)
[28] 王素青,姜维福. 基于MATLAB/Simulink的PID参数整定[J]. 工程控制与应用,2009,28(3):24-26.
Wang Suqing, Jiang Weifu. PID tuning based on MATLAB/Simulink[J]. Industry Control and Applications, 2009, 28(3): 24-26. (in Chinese with English abstract)
[29] 何芝强. PID 控制器参数整定方法及其应用研究[D]. 杭州:浙江大学,2005.
He Zhiqiang. Parameters Tuning Methods and Its Application Research of PID Controller[D]. Hangzhou: Zhejiang Universuty, 2005. (in Chinese with English abstract)
[30] 宋乐鹏,董志明,向李娟,等. 变量喷雾流量阀的变论域自适应模糊PID控制[J]. 农业工程学报,2010,26(11):114-118.
Song Lepeng, Dong Zhiming, Xiang Lijuan, et al. Variable universe adaptive fuzzy PID control of spray flow valve[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(11): 114-118. (in Chinese with English abstract)
Adaptive fuzzy-PID control of accurate orientation for auto-detect seedling supply device
Liu Jiaodi1,2, Cao Weibin1※, Xu Hongzhen3, Tian Dongyang1, Jiao Haobo1, Ouyang Yineng4
(1.,,832000,; 2.,,404100,; 38320004832000,)
There is more serious seedling leakage phenomenon for duckbill-type automatic transplanter. When the seedlings in plug tray are lacked or the picking seedling machinery fails to pick seedling or the trajectory is inaccurate, throwing seedling to duckbill planter will cause cavity phenomenon on the surface of soil. Current research has focused on seedlings detection out of plug tray, aiming to provide guidelines in picking seedling mechanism’s work regularity. However, it cannot resolve the problems that picking seedling needle clamp fails to grip seedlings into duckbill planter, which leads to seedling trajectory deviation. In this paper, a new auto-detect seedlings device suitable for automatic transplanting machine was designed in order to solve the problems above. Seedling positioning detection control system was analyzed and studied systematically. Different from general control system of transplanting machine, which was commonly simple closed-loop control, a method was developed, which adopted the self-adaptation fuzzy-PID (proportion, integral, derivative) control algorithm. It could control stepping motor angle speed firmly, improve response speed to angle speed, and control seedlings positioning accurately on automatic detection system. The mathematical model of the stepping motor velocity control transfer function was developed, and the adaptive fuzzy-PID controller and the fuzzy rules were designed. The mathematical model of angular speed control of stepping motor was established through MATLAB Simulink module based on fuzzy-PID controller of stepper motor system. The control model took step signal as excitation signal, and the adaptive fuzzy-PID control and PID control simulation experiments showed that when the system exerted incentive through step signal, the response time of PID control was 7 s, the system response was slow, and the shock with a super adjustable volume of 0.1 appeared. Through adjusting PID controller parameter and increasing proportion coefficient, the system response time was shortened to 2.2 s, the system response speed obviously sped up, and the shock did not appear. But, PID controller parameter adjustment was offline, and the system load mutation or tough working environment for seedlings detection system would be prone to all kinds of interference. And it may not quickly be adjusted to the steady state values to fill the gaps with seedlings detection system. Response time of adapted fuzzy-PID was 0.12 s and the stepping motor system quickly reached the steady-state value of the step response. It showed that the angular velocity control of stepping motor was stable and the angle change was fast, which could meet the positioning requirements of seedlings conveying. When the auto-detect seedlings device load mutated or the expected value of stepping motor speed changed, the stepping motor could fast response, and the seedlings could fill the gaps timely and be planted normally, at the same time the seedling which will fill the gap will be conveyed to the required position. The experiment result of automatically filling the gaps with seedlings showed that the actual seeding frequency of 2ZXM-2 automatic membrane transplanting machine was 40-60 seedlings/min. When seeding frequency was more than 60 seedlings/min, there existed matching error between seedlings manipulator and plant duckbill. It could increase the leakage rate of seedlings. When the frequency was lower than 40 seedlings/min, the planting efficiency was low and at the same time it could make planting distance of transplanting seedling larger. The seeding frequency was 40, 50 and 60 seedlings/min in test, and the success rate of filling the gaps with seedlings was 100%, 100%, and 95.8%, respectively. As long as the optical fiber sensor detected slight signal, the stepping motor responded quickly based on adaptive fuzzy-PID control system, and the control system of filling the gaps with seedlings could automatically fill the gaps with seedlings accurately and timely. This provides a new method to solve the problem of seedlings leakage of automatic transplanting machine in field.
agricultural machinery; experiments; control; automatic filling seedlings; positioning control
10.11975/j.issn.1002-6819.2017.09.005
TP273
A
1002-6819(2017)-09-0037-08
2016-10-08
2017-03-23
国家自然科学基金资助项目(51565048);重庆大学国家机械传动重点实验室开放课题(SKLMT-KFKT-201516);
刘姣娣,女,湖南邵阳人,副教授,博士,主要从事旱地移栽机械的研究。石河子 石河子大学机械电气工程学院,832000。 Email:shzdxljd@163.com
曹卫彬,湖北襄阳,教授,博士生导师,主要从事农业机械教学与科学研究。石河子 石河子大学机械电气工程学院,832000。 Email:wbc828 @163.com
刘姣娣,曹卫彬,许洪振,田东洋,焦灏博,欧阳异能. 自动补苗装置精准定位自适应模糊PID控制[J]. 农业工程学报,2017,33(9):37-44. doi:10.11975/j.issn.1002-6819.2017.09.005 http://www.tcsae.org
Liu Jiaodi, Cao Weibin, Xu Hongzhen, Tian Dongyang, Jiao Haobo, Ouyang Yineng. Adaptive fuzzy-PID control of accurate orientation for auto-detect seedling supply device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(9): 37-44. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.09.005 http://www.tcsae.org
猜你喜欢
四川党的建设(2022年13期)2022-07-07
当代水产(2021年4期)2021-07-20
农业工程技术·温室园艺(2021年3期)2021-07-08
农业工程技术(2021年7期)2021-05-31
农业工程学报(2021年3期)2021-04-15
林业科技(2020年3期)2021-01-21
当代水产(2020年4期)2020-06-16
当代水产(2020年4期)2020-06-16
当代水产(2019年9期)2019-10-08
农机化研究(2019年7期)2019-05-24
