加入前馈补偿的时滞系统鲁棒性跟踪控制器
2017-06-27 08:14陆兴华郑昶宏吴焕彬彭意达
计算机技术与发展 2017年6期
陆兴华,郑昶宏,吴焕彬,姚 威,彭意达
(广东工业大学华立学院,广东 广州 511325)
加入前馈补偿的时滞系统鲁棒性跟踪控制器
陆兴华,郑昶宏,吴焕彬,姚 威,彭意达
(广东工业大学华立学院,广东 广州 511325)
时滞系统的优化跟踪控制在过程控制、飞行控制等领域应用广泛,传统的Smith控制对时变二自由度时滞系统控制效果不好,偏差较大时的控制鲁棒性不高。为了提高系统的稳定性和快速反应能力,在对时滞系统鲁棒性跟踪控制器进行改进设计的基础上,提出了一种加入前馈补偿的时滞系统鲁棒性跟踪控制器设计方法。应用该方法基于内模控制思想构建了二自由度的时滞控制系统,采用常规Smith控制器结构实现被控对象的输入输出描述,在经典的Smith控制器设计的基础上,加入前馈补偿算子自适应训练控制器神经元,采用最速下降法构建LMBP算法,避免了时滞系统的鲁棒性跟踪控制的最优值陷入局部收敛,实现了对时滞系统鲁棒性跟踪LM-Smith控制器的改进设计。仿真结果表明,采用该方法的时滞系统控制精度较高,鲁棒性较好,控制性能有明显改善。
时滞系统;鲁棒性;控制;前馈补偿
0 引 言
在人工智能控制和工业控制等领域中,由于输入信号的时间延迟和控制系统的灵敏度等问题,导致工业过程控制中出现时滞现象。由于控制过程的时间延迟,导致控制信号无法实时准确地作用在控制系统中,使得被控对象的鲁棒性和稳定性不好,特别是在被控对象受到不确定性摄动干扰和过程偏离时,控制系统不能及时反馈控制信息,导致控制系统的稳定性不好。需要研究时滞系统的鲁棒性跟踪控制问题,有效解决因为时滞现象导致的系统动态性能不好、快速反馈能力不高等问题,研究时滞系统的优化控制方法,将在过程控制、飞行控制和交通控制等领域都具有较好的应用价值[1]。
对时滞系统的控制方法主要采用的是BP神经网络控制、模糊免疫控制、滑膜积分控制和基于粗糙集理论前馈补偿控制等方法[2-4]。早期,Smith提出了针对时滞系统的预估控制,对时滞系统加入自适应反馈信号,通过幅相裕度的参数整定方法引出系统和模型的时滞环节,跟踪时滞系统的相移,使控制信号在作用时间上能够补偿系统的时间延迟,这种控制方法称为Smith控制[5]。该控制方法在工业控制等领域具有较好的应用价值,但是对时变二自由度系统的控制过程中,不能建立精确的数学模型,导致Smith控制方法对时变二自由度的时滞系统的控制效果不好,在模型偏差较大时控制的鲁棒性不高。对此,相关文献进行了算法改进设计,其中,文献[6]提出一种基于模糊Smith控制的闭环控制方法,在Smith控制器中加入模糊神经网络控制器进行参数自整定性调节,提高了控制器的响应能力和鲁棒性,但该方法存在计算开销较大、应用性不高的问题。文献[7]提出一种基于混沌周期跟踪同态控制的时滞系统的鲁棒性控制方法,提高了时滞系统的同步控制能力。该控制器在迭代学习控制同步误差收敛容易陷入局部最优解,可能导致系统的不稳定。文献[8]提出一种基于Morris-Lecar(ML)模型的时滞系统控制设计方法。该控制器设计包括了对时滞系统的反馈控制、反演设计、非线性控制,控制器具有多参数、强耦合和非线性特性,但该方法在迭代学习控制过程中,在有限的时间区间内无法实现对误差的完全跟踪,在先验知识缺乏的情况下控制器的稳定性不能得到保证[9]。
针对上述问题,提出了一种基于前馈补偿的时滞系统鲁棒性跟踪控制器设计方法。首先分析了常规的Smith控制器,并进行控制对象的参量模型构建,实现对被控系统的参量整定性分析和描述,在Smith控制结构的基础上,引入前馈补偿设计,用Levenberg-Marquardt(LM)算法对神经元网络进行训练,设计一种改进的LM-Smith控制器,实现对时滞系统的鲁棒性跟踪控制。仿真实验进行了性能验证,展示了提出方法在提高时滞系统控制性能方面的优越性。该控制器能对时变对象进行跟踪和补偿,控制效果较好。
1 被控对象描述和LM-Smith神经网络控制器
1.1 常规的Smith控制器和控制对象的参数分析
为了实现对时滞系统的鲁棒性控制,首先分析时滞系统被控对象,进行控制参量分析,利用内模控制思想设计二自由度的时滞控制系统,采用常规Smith控制器的结构进行被控对象的输入输出描述[10-12],得到常规的Smith控制器结构,如图1所示。

图1 Smith控制结构框图
图1中,G0(s)e-τs是时滞二自由度控制系统的系统传递函数,Gc(s)是控制器,Y(s)与e-tms是建立的系统响应闭环特征函数。利用内模控制思想设计二自由度PID控制器,当时滞耦合系统传递函数确定时,Gm(s)=G0(s),tm=τ,系统的反馈信号为:
H(s)+Y(s)=Gm(s)U(s)
(1)
上述Smith控制系统形成了一种二自由度IMC-PID控制器,首先建立被控系统时滞耦合系统传递函数:
(2)
其中,控制器的输入向量相当于直接从Gm(s)的输出端引出了反馈信号,构建非线性耦合的时滞闭环系统,当系统受到干扰向量e-tms的影响,通过设计控制器使系统的闭环传递函数与系统惯性环节满足传递函数:
(3)
上述的传递函数的特征方程没有时滞项,延迟环节用预估模型实现时滞环节的误差跟踪补偿。延迟环节用泰勒近似得:
(4)
当模型不准确时,存在特征方程:
(5)
时滞二自由度控制过程中功率增益K=ΔK·Km,其中ΔK>0,特征方程仍受时滞环节的影响,且灵敏度函数误差越大,控制性能越差。为了对被控时滞系统进行误差跟踪补偿和鲁棒性控制,需要将图1中的控制对象分解为确定性和不确定性的两个控制环节,分别为Gm(s)e-tms与Gm(s)。给这两个控制环节分别构造一组时滞二自由度控制自抗扰神经元网络,使用LM算法进行自适应训练和Smith控制器改进设计。
1.2 LM-Smith神经网络控制律
在上述传统Smith控制器设计的基础上,分析图1所示的时滞系统,以此为被控对象,进行时滞系统的鲁棒性控制算法改进。构建非线性耦合LM控制方程:
(6)
其中,λ1和λ2为滤波时间常数;Km为纯滞后环节的最大幅值;Lm为开环传递的增益系数;Tmi为滞后时间。
在惯性环节加纯滞后环节,得到传递函数为:
(7)
通过调节λ1和λ2获得最大灵敏度,确保控制系统的稳定性,同时利用一阶泰勒展开近似e-Lms=1-Lms,在系统的核空间矩阵中,引入前馈补偿设计,用LM算法对神经元网络进行训练[13],得到的鲁棒性控制预估模型看作是两个控制环并联,改进的LM-Smith时滞系统控制器结构如图2所示。

图2 改进的LM-Smith时滞系统控制器结构图

(8)
令Δxk=αpk,其中α为向量长度,利用PID算法进行时滞二自由度控制,得到时滞二自由度控制系统的模糊自适应耦合隶属度传递函数为:
(9)

2 LMBP算法与时滞系统鲁棒性跟踪控制算法改进实现
2.1 LMBP算法
在BP神经网络控制算法的基础上,设计LM-Smith神经网络控制律,而传统方法对时滞系统的控制采用Smith预估模型,当被控对象发生非线性变化和受到干扰时,控制误差的反馈调节性能不好。为了克服传统方法的弊端,提出一种加入前馈补偿的时滞系统鲁棒性跟踪控制器设计方法。在LM算法的基础上,以牛顿法为基础,引入前馈补偿进行时滞系统的鲁棒性跟踪控制。假设时滞系统的被控对象目标性能函数F(x)的LM级数展开为:

(10)
其中,xk是n维用二阶泰勒级数展开,x的第k次神经网络迭代输出;gk与Ak分别为神经元控制迭代优化梯度;F(x)为控制对象的二阶梯度2F(x)的第k次迭代值。
根据神经网络泛函,F(xk+1)在偏导数为零处取极小值,采用最小信息熵泛函,得到:
gk+AkΔxk=0
(11)
通过构造李雅普诺夫泛函,解得:
(12)
根据牛顿-莱布尼兹公式,基于双模鲁棒预测控制,设F(x)为输入状态稳定输出,即:
(13)
则持续扰动离散系统的一阶梯度第j个分量为:
(14)
计算时滞系统在持续扰动下的干扰输入,得到离散广义系统的矩阵测度为:
(15)
使用了凸多面体方法优化LM-Smith神经网络性能,通过被控对象和输入输出信号进行时滞跟踪,得到时滞系统的鲁棒性跟踪控制的雅可比矩阵J(x)为:
(16)
求解LM-Smith神经网络泛函,接着计算时滞系统的二阶梯度2F(x)为:
(17)
由此,通过前馈补偿,得到LM控制下的BP控制律为:
(18)
当μk极大时,时滞系统鲁棒性跟踪控制还原为最速下降法,控制系统具有稳定性。
2.2 时滞系统鲁棒性跟踪控制算法改进实现
将LM算法应用于BP神经网络训练中,加入前馈补偿积分项目,利用时滞系统误差向后传播的特点,进行时滞系统鲁棒性跟踪控制设计。设神经网络训练样本的容量为Q,得到时滞系统鲁棒性跟踪控制的性能指标函数为:

(19)


(20)
分析滑模切换函数的未扰运动参量,在存在干扰的n阶线性不确定离散系统中,当S(x)很小时,2F(x)可以近似表示为:

(21)
确定神经网络结构,将样本输入网络,将LM算法应用于BP神经网络训练,得W和Z的迭代公式为:
(22)
(23)
使用训练样本训练神经网络,得到时滞系统鲁棒性控制的多层网络训练的雅可比矩阵为:
(24)
计算出雅可比矩阵后,将样本输入网络,得到时滞系统鲁棒性跟踪控制的一般项为:
(25)
(26)
通过在控制器中加入前馈补偿,进行时滞系统的误差跟踪补偿,第k次跟踪误差为:
ek(t)=yd(t)-yk(t)
(27)
通过上述设计,使用最速下降法构建LMBP算法,当性能指标函数小于给定值时,算法收敛,通过设计控制器使系统的闭环传递函数收敛到最优值,避免了时滞系统的鲁棒性跟踪控制的最优值陷入局部收敛。
3 仿真实验与性能分析
为了测试所设计的控制算法在实现时滞系统鲁棒性跟踪控制中的性能,对其进行仿真实验。实验建立在Matlab 7.0环境上,硬件环境如下:Dell 3410b,处理器为Intel Core2 Duo1.56 GHz,1 G内存,主频为DER2 667的PC机。
(28)
在上述常规Smith控制器的基础上,引入LM算法进行神经网络自适应训练,构建LM-Smith控制器。为了展示所设计的LM-Smith控制器对时滞系统鲁棒性跟踪控制中的鲁棒性能,采用LMBP算法确定神经网络结构,计算输出值、误差向量。选择μ=1,θ=0.5,选取了方波、线性调频波、正弦波等三种信号进行LMNN1与LMNN2的预训练,设采样时间为12 s,得到控制对象分解的确定性和不确定性的两个控制环节Gm(s)e-tms与Gm(s)的离散预估模型为:
y(k)=0.579 6y(k-1)+0.399u(k-5)+ 0.021 46u(k-6)
(29)
y(k)=0.472 4y(k-1)+0.633 2u(k-1)
(30)
在控制器中,用测试样本测试神经网络,使用LMNN1跟踪Gm(s)e-tms,LMNN2跟踪Gm(s),得到LM-Smith控制器对Gm(s)e-tms和Gm(s)的训练输出,如图3所示。
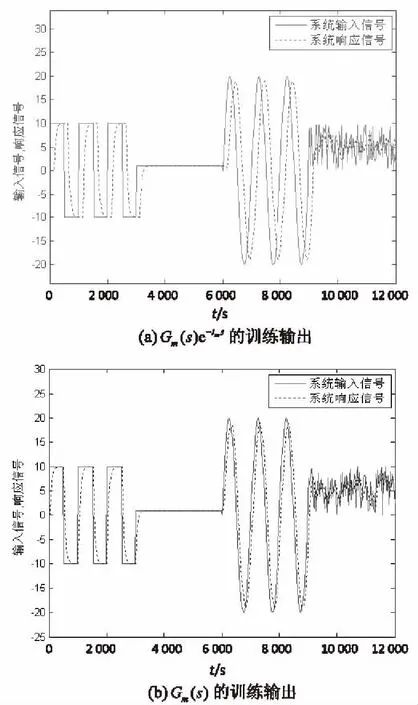
图3 LM-Smith控制器对时滞系统两部分的预训练结果
从图中可见,采用所设计的控制器,对时滞系统进行预训练,能使得控制测试误差在理想的范围之内,保证测试结果的真实有效,控制对象离散化后都是线性函数,有效保证了控制器的稳定性和收敛性。以此为基础,在LM-Smith控制器中引入神经元模型和前馈补偿,进行时滞系统被控对象的鲁棒性跟踪仿真,分别对时滞系统在存在时滞现象和无时滞现象时进行跟踪控制,控制仿真共采样2 024次。
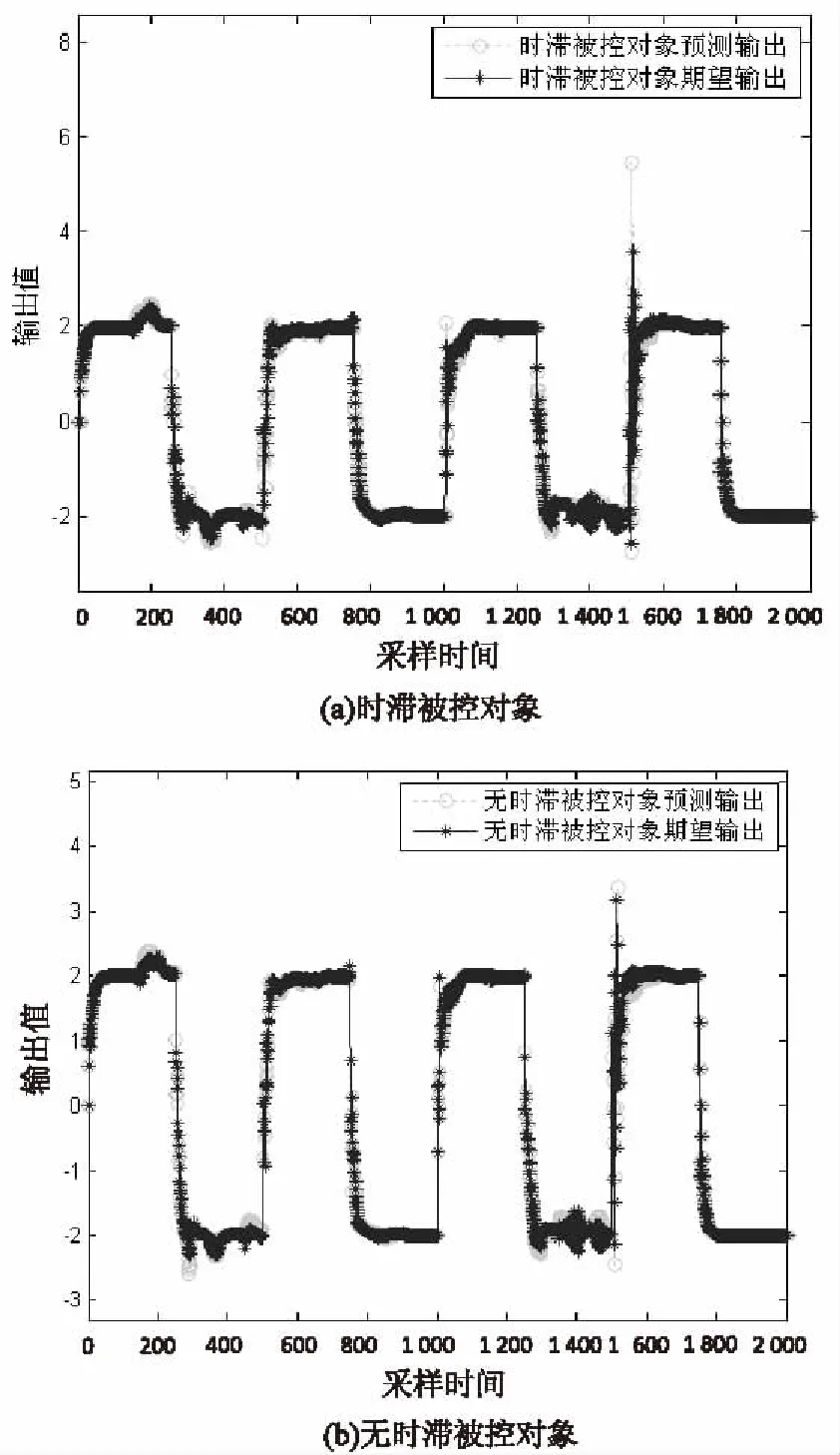
图4 被控对象的期望输出和预测输出结果
从图4可见,采用所提出的算法,通过加入前馈补偿算子自适应训练控制器的神经元,在时滞系统中,无论被控对象存在或不存在时滞现象,在被控对象变化不大的条件下,时滞系统的小扰动得到有效补偿,误差跟踪补偿性能较好,保证了LM-Smith控制器对被控对象的实时跟踪控制,预测输出与期望输出具有较好的一致性,控制精度较高,鲁棒性较好。为了定量对比算法性能,采用传统方法和提出算法,以控制误差分布为测试指标,对比结果如图5所示。


图5 控制误差分布对比
从图5可见,采用提出算法的误差分布较传统方法较小,控制性能得到有效改善。
4 结束语
当前的时滞系统的控制采用Smith预估模型,当被控对象发生非线性变化和受到干扰时,控制误差的反馈调节性能变差。为此,提出一种加入前馈补偿的时滞系统鲁棒性跟踪控制器设计方法。实验结果表明,采用该方法设计的时滞系统鲁棒性跟踪控制器,构造简单,准确性好,控制性能优越,在工业过程控制等领域具有较好的应用价值。
[1] 董文瀚,马振强,解武杰,等.非匹配不确定离散系统的无抖振积分滑模控制[J].控制与决策,2015,30(12):2181-2186.
[2] 章 俊,张冬梅,王辛刚.一类参数不确定连续正系统受限控制[J].信息与控制,2015,44(5):592-597.
[3] Zhang J F,Han Z Z,Wu H.Robust finite-time stability and stabilization of switched positive systems[J].IET Control Theory and Applications,2014,8(1):67-75.
[4] Ngoc P H A.Stability of positive differential systems with delay[J].IEEE Transactions on Automatic Control,2013,58(1):203-209.
[5] Smith S M,White K,Xu M.Fuzzy logic flight and bottom following controllers for the ocean voyager II AUV[C]//Proceedings of the joint conference on information sciences.Pinehurst:Association for Intelligent Machinery,1994:56-59.
[6] 程 帅,孙俊喜,曹永刚,等.多示例深度学习目标跟踪[J].电子与信息学报,2015,37(12):2906-2912.
[7] Zhong W, Lu H C, Yang M H. Robust object tracking via sparse collaborative appearance model[J].IEEE Transactions on Image Processing,2014,23(5):2356-2368.
[8] Vincent P,Larochellel H,Lajoie I,et al.Stacked denoising autoencoders:learning useful representations in a deep network with a local denoising criterion[J].Journal of Machine Learning Research,2010,11(12):3371-3408.
[9] 李天成,孙树栋.采用双重采样的移动机器人Monte Carlo定位方法[J].自动化学报,2010,36(9):1279-1286.
[10] 穆施瑶,朱 琦.双层网络中一种新的接入控制机制[J].电子学报,2015,43(6):1231-1235.
[11] 万 磊,张英浩,孙玉山,等.基于自抗扰的自主水下航行器地形跟踪控制[J].兵工学报,2015,36(10):1943-1948.
[12] 韩京清.自抗扰控制技术-估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2009:243-261.
[13] Xiang M,Xiang Z R,Karimi H R.Stabilization of positive switched systems with time-varying delays under asynchronous switching[J].International Journal of Control,Automation and Systems,2014,12(5):939-947.
[14] 张丽香,陈凤兰.自适应Smith预估补偿的过热汽温控制系统[J].信息与控制,2015,44(5):513-518.
Robust Tracking Controller of Time Delay System with Feedforward Compensation
LU Xing-hua,ZHENG Chang-hong,WU Huan-bin,YAO Wei,PENG Yi-da
(Huali College of Guangdong University of Technology,Guangzhou 511325,China)
Optimal tracking control for time delay systems are widely used in process control and flight control.The effect of traditional Smith control in time-delay system with time-varying two degrees freedom is not so good that the control robustness is not satisfied with big deviation.In order to improve the stability and fast response ability of the system,design method for robust tracking control of time delay systems has been presented on the basis of improvements on robust tracking controllers of time-delay systems with feedforward compensation and thus two-freedom-degree time-delay systems has been established with internal model control structure to describe the input and output of controlled objects with conventional Smith controller’s structures.Based on the design of Smith controller,the feed forward compensation controller training operator adaptive neuron has been introduced into the time-delay systems and the LMBP algorithm has been constructed with steepest descent method.Therefore the local convergence of optimal robust tracking control value in time-delay systems has been avoided with the implementation of improvements on robust LM-Smith controller design of time-delay system.The simulation results show that the robustness of this proposed method is better than other methods and its control accuracy is higher with less error and that the performances of the established time-delay systems have been promoted significantly.
time delay systems;robustness;control;feedforward compensation
2016-04-06
2016-08-10 网络出版时间:2017-03-13
2015年广东省重点平台及科研项目青年创新人才类项目(自然科学类)(2015KQNCX218);2016年广东省大学生科技创新培育项目(pdjh2016b0933);2012广东省质量工程项目“机电综合技能实训中心”(粤教高函[2012]204号)
陆兴华(1981-),男,硕士,讲师,研究方向为计算机控制算法、人工智能。
http://kns.cnki.net/kcms/detail/61.1450.TP.20170313.1545.004.html
TP302
A
1673-629X(2017)06-0136-06
10.3969/j.issn.1673-629X.2017.06.028
猜你喜欢
科技研究·理论版(2021年22期)2021-04-18
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
北京航空航天大学学报(2020年10期)2020-11-14
环球时报(2020-08-11)2020-08-11
农业机械学报(2020年2期)2020-03-09
北方工业大学学报(2019年5期)2019-03-30
上海师范大学学报·自然科学版(2018年3期)2018-05-14
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年16期)2016-06-29