
Cessna-172P自动驾驶机翼水平调整器Ziegler-Nichols PID控制方法
2017-06-26 12:50赵鑫业梁海明孙光明杨帆
计算机与数字工程 2017年6期
赵鑫业梁海明孙光明杨帆
(1.海军大连舰艇学院大连116018)(2.海军航空工程学院烟台264001)
Cessna-172P自动驾驶机翼水平调整器Ziegler-Nichols PID控制方法
赵鑫业1,2梁海明1孙光明1杨帆2
(1.海军大连舰艇学院大连116018)(2.海军航空工程学院烟台264001)
针对Cessna-172P自动驾驶机翼水平调整器PID控制参数设计离线工作量大的问题,提出了Ziegler-Nichols PID控制方法。Ziegler-Nichols PID控制器的自适应过程不需要系统的任何先验知识,也不需要建立任何对象模型,可以保证控制回路始终运行在最佳状态。设计方法通过对Cessna-172P自动驾驶机翼水平调整器达到自适应控制,结合JSBSim飞行仿真系统对其进行初步仿真。仿真实验结果证明,所设计的驾驶机翼水平调整器在全局范围内具有良好的动态响应性能。
自动驾驶;机翼水平调整器;Ziegler-Nichols;PID控制;JSBSim
Class NumberTP13
1 引言
本文以Cessna 172P固定翼轻型教练机为研究背景,对该飞机进行动力学仿真,验证飞机的飞行特性,同时,对其他以飞机为对象的研究工作也具有参考价值。该飞机一般为低中空、低速飞行,并由升降舵、方向舵及副翼控制飞行姿态。Cessna 172P(如图1所示)被誉为世界上最著名的单发教练机,是Cessna公司的经典之作,因其杰出的安全记录和优秀的操作性能成为史上最安全通用航空飞机。在C172P飞行过程中使用自动驾驶,机翼水平调整器进行PID控制,主要是去除非零滚动角Φ,使机翼保持水平,这样的自动驾驶仪则要控制副翼。

图1 Cessna 172P飞机
Zieglcr-Nichols的PID整定方法具有很深的影响力,它的频率响应方法是通过比例控制器的临界振荡试验获得过程对象重要的临界频率响应特性,并给出了相应的PID参数整定规则。Ziegler-Nichols整定方法不需要建立任何对象模型、简单实用,所以目前在控制领域中仍然被广泛采用[1~4]。
本文介绍了一种基于Ziegler-Nichols参数整定方法的自校正PID控制器,应用在C172P自动驾驶机翼水平调整器仿真设计中。该仿真以JSBSim为平台,利用JSBSim的强大计算功能,采用系统辨识技术和改进的闭环Ziegler-Nichols参数整定方法,实时估计系统参数和整定控制器参数。
2 JSBSim飞行动力学模型框架
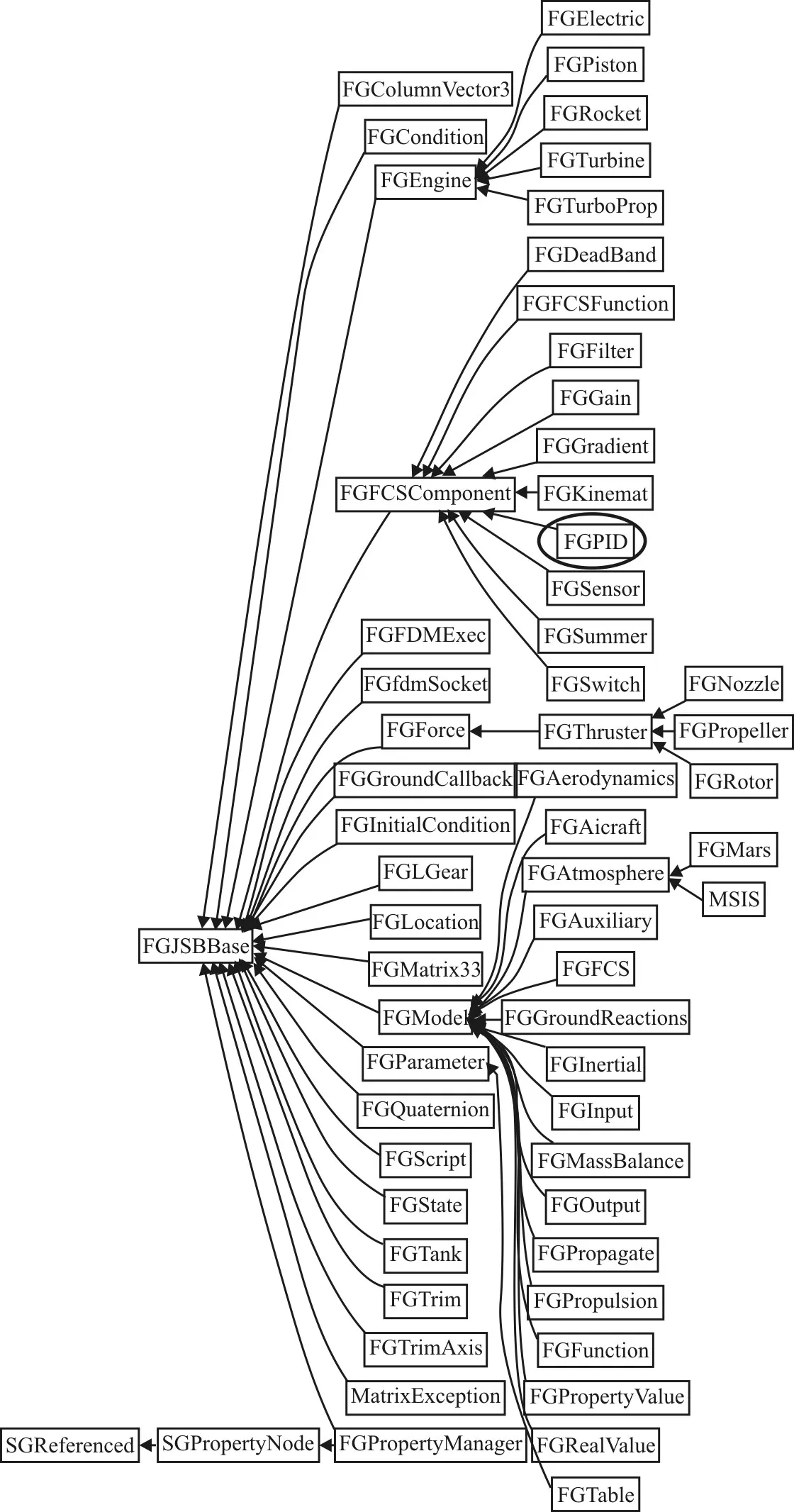
图2 JSBSim类继承关系[6]
飞行仿真是飞行器型号设计与飞行试验的重要辅助手段,一般包括视景仿真、动力学模型与飞控仿真、仪表显示及操纵控制台等子系统。飞行动力学模型与飞控系统为飞行仿真的核心部分,负责根据操纵输入与环境参数更新飞行器状态。JSBSim飞行动力学模型是一个开源的、多平台支持、由数据驱动的通用飞行动力学模型[5~6],已经成功应用于多个飞行仿真及飞行器设计工程项目中[7~9]。该模型主要功能是根据飞行控制模块输入的数据对飞行器的空气动力特性进行计算,解算飞行器的六自由度运动方程以及对因大气环境变化、飞行器起落架、襟翼收放等。
使用JSBSim建模时,无需修改主程序、无需重新编译和连接程序代码,只需重新配置XML格式的模型规格文件,就可以实现对不同机型的仿真。JSBSim所采用的面向对象的C++,语言界面友好、使用批处理模式、代码效率高,具有更高的实时性[5]。因此,JSBSim模型更符合自动驾驶机翼水平调整器仿真需要,更符合实时的飞行动力学建模,更符合本文的研究目的。JSBSim模型的飞行控制子模块能够实现放大器、积分器、累加器、限幅器、PID控制器等,具体子模块继承分类关系如图2所示。
3 Zigler-Nichols PID控制器设计
滚动角速率反馈的俯仰角控制系统原理如图3,线框内为PID控制器。外回路控制设计目的是使滚转角Φ(机翼保持水平)能快速跟踪参考输入,并尽量消除静态误差。

图3 具有滚动角速率反馈的滚动角PID控制系统
本节利用连续Zieglcr-Nichols方法用于整定设计PID控制器,达到系统满意的要求。在对C172P自动驾驶机翼水平调整器(WingLeveler)进行运动学和动力学分析后,得到系统的非线性物理模型,线性化后得到系统的状态方程,利用Zigler-Nichols法则[10~12],设计PID控制器为

得到单位负反馈系统闭环传递函数为

表1为Ziegler-Nichols整定规则,控制类型分别为P,PI,PID。
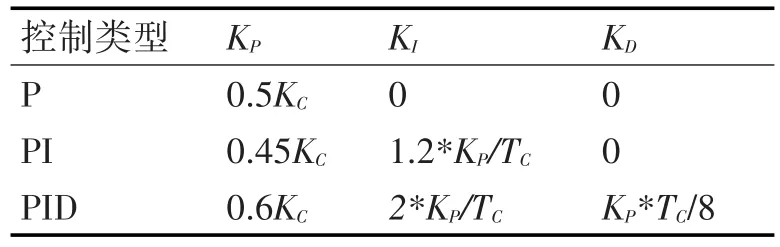
表1 Ziegler-Nichols整定规则
Zigler-Nichols方法是基于稳定性分析的PID整定方法,该方法整定比例系数KP、积分系数KI、微分系数KD的思路是:
1)置KI=KD=0,然后增加KP直至系统开始振荡(即闭环系统极点在jω轴上),此时KC=KP,KC即关键(critical)增益,或被称为最终增益,震荡波峰到波峰的周期被称为关键震荡周期TC。
2)得到KC,TC后,根据具体需要确定采用P,PI,PID类型,设置规则如表1所示。
3)根据不同的控制类型P,PI,PID计算出控制器参数,最后得到PID控制器输出对被控对象进行控制。
4 仿真实验
在JSBSim飞行仿真系统中运行C172P飞机的飞行脚本,仿真时间为0s~30s,脚本概述如下:飞机初始高度为3000m,偏航角ψ为200°;由于风力影响,滚转角Φ在时间0s时有阶跃响应输入,飞机在飞行0.25s后启动引擎,在0.5s后启动配平,在3s后开启滚动轴自动驾驶——启动机翼水平调整器(fcs/wing-leveler-ap-on-off为机翼水平调整器开关控制变量,如图4所示)。
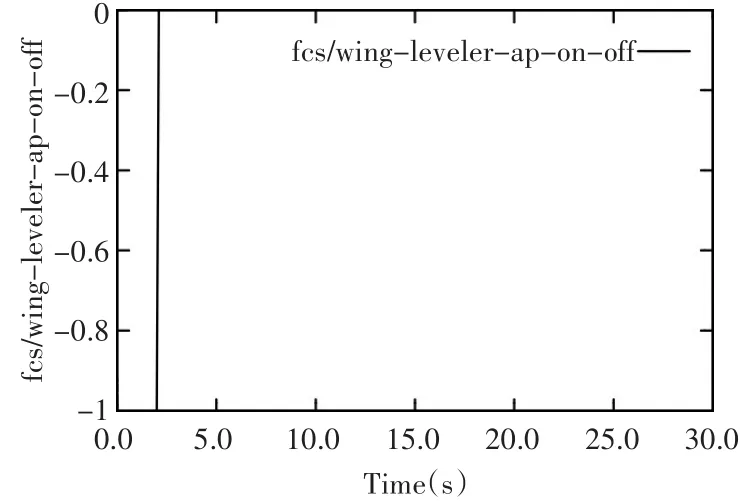
图4 fcs/wing-leveler-ap-on-off变化曲线
在JSBSim中运行该脚本,使用Ziegler-Nichols方法整定PID控制器系数如下:
1)增加比例增益KP重复运行直至引起震荡输出,KP选择7、8、9、10,输出控制如图5所示,可见当KP=9时系统开始振荡,故KC=KP=9,TC=1.25s。
2)如果仅需要比例控制,KP=0.5*KC=4.5,此时的输出控制如图6所示,滚动角被校正了,但是超调比较大并且有一定的稳态误差。
3)因此使用PI控制用于消除稳态误差,再次参照表1,KP=0.45*KC=4.05,KI=1.2*KP/TC=3.888,此时的输出控制如图7所示,此时稳态误差几乎为0,但超调过大。
故引入微分控制实现PID控制器,参照表1,KP= 0.6*KC=5.4,KI=2*KP/TC=8.64,KD=KP*TC/8=0.84375,此时的输出控制如图8所示,此时超调已消除,震荡也已消失,左副翼执行器、右副翼执行器位置响应曲线、有效副翼位置响应曲线分别如图9~图12所示,由此可以看出,拟合得到的控制器能够很好地保证工作点处的系统性能。
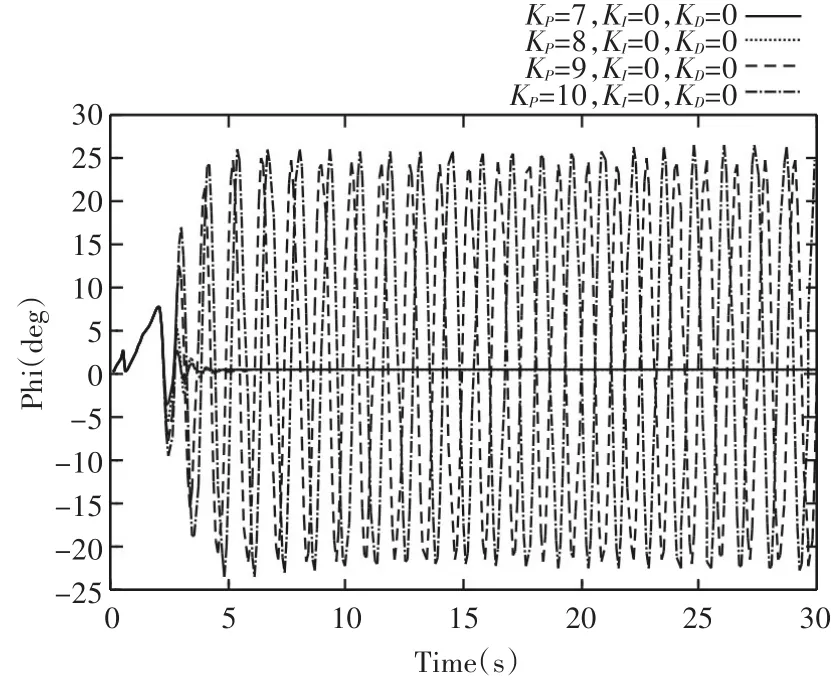
图5 控制规则为P时不同KP下滚动角阶跃响应曲线
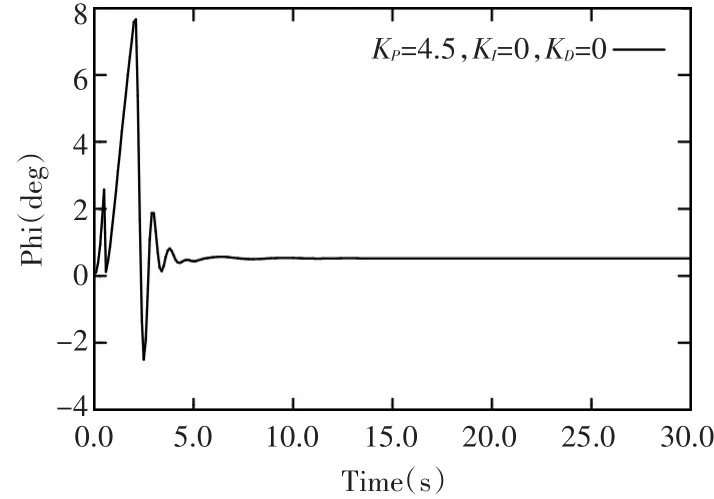
图6 控制规则为P时KP=4.5下滚动角阶跃响应曲线
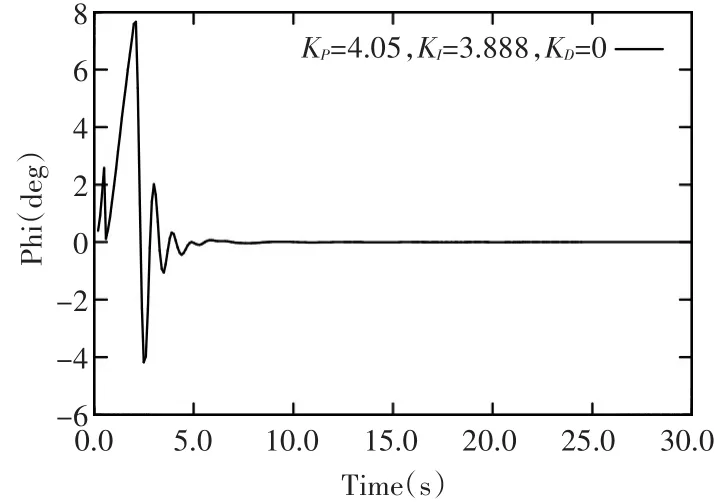
图7 控制规则为PI时KP=4.05,KI=3.888下滚动角阶跃响应曲线

图8 控制规则为PID时KP=5.4,KI=8.64,KD=0.84375下滚动角阶跃响应曲线
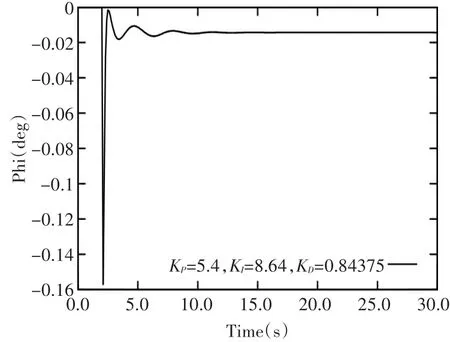
图9 控制规则为PID时KP=5.4,KI=8.64,KD=0.84375下左副翼执行器偏移距离阶跃响应曲线
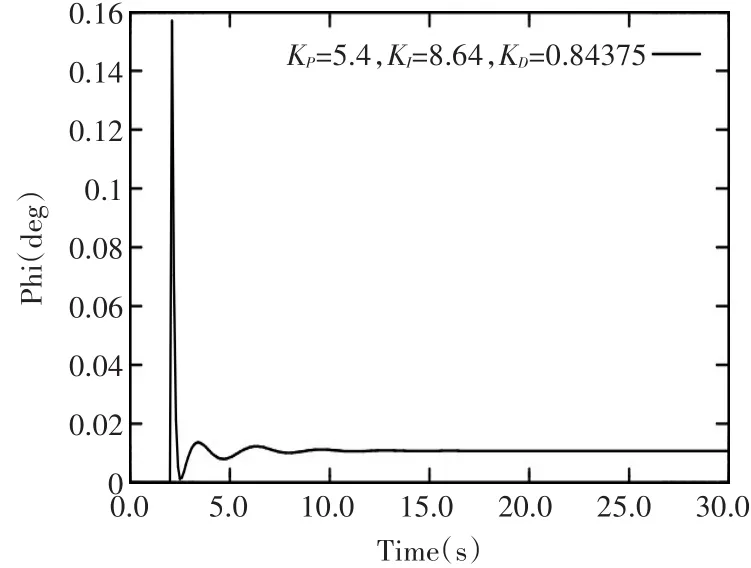
图10 控制规则为PID时KP=5.4,KI=8.64,KD=0.84375下右副翼执行器偏移距离阶跃响应曲线

图11 控制规则为PID时KP=5.4,KI=8.64,KD=0.84375下有效副翼偏移距离阶跃响应曲线

图12 控制规则为PID时KP=5.4,KI=8.64,KD=0.84375下滚转角速度阶跃响应曲线
此机翼水平调整器只有一个单一的环,被处理的位置误差和副翼命令被输出,转换为滚动角速率。然而,在这种情况下,滚动角速率并没有收到限制。更好的解决方案可能涉及限制滚动角速率。滚动角误差能够被处理用于控制和限制滚动角速率,此时比较滚动角速率与真实滚动角速率,差值用于计算副翼命令,最终驱动滚动角速率为0,这是下一步的工作方向。
5 结语
本文另以C172P为研究背景,对该飞机飞行过程中机翼水平进行动力学仿真,验证飞机的飞行特性,同时,对其他以飞机为对象的研究工作也具有参考价值。通过研究固定翼飞机自动驾驶机翼水平调整器PID控制参数调整问题,对于摸索飞行动力学的控制方法,解决控制过程中系统的鲁棒性、稳定性问题都有重要的意义。PID控制器的自适应过程不需要系统的任何先验知识,也不需要建立任何对象模型,可以保证控制回路始终运行在最佳状态。仿真实验表明了自适应PID控制的有效性和可行性性,为相关领域的研究提供了有益的参考。
[1]Modeling and simulation of interleaved Buck-boost converter with PID controller[C]//Intelligent Systems and Control(ISCO),2015 IEEE 9th International Conference on.IEEE,2015:1-6.
[2]Jafar A,Ahmad S M,Ahmed N.Mathematical modeling and control law design for 1DOF Quadcopter flight dynamics[C]//2016 International Conference on Computing,Electronic and Electrical Engineering(ICE Cube).IEEE,2016:79-84.
[3]Meshram P M,Kanojiya R G.Tuning of PID controller using Ziegler-Nichols method for speed control of DC motor[C]//Advances in Engineering,Science and Management(ICAESM),2012 International Conference on.IEEE,2012:117-122.
[4]王亚刚,许晓鸣,邵惠鹤.基于Ziegler-Nichols频率响应方法的自适应PID控制[J].控制工程,2012,19(4):607-609,613.
WANG Yagang,XU Xiaoming,SHAO Huihe.Adaptive PID Controller Based on Ziegler-Nichols Frequency Method[J].Control Engineering of China,2012,19(4):607-609,613.
[5]马骏,孙秀霞,董文瀚.基于JSBSim的运输机重装空投飞行仿真系统[J].计算机应用与软件,2012,29(10):65-68.
MA Jun,SUN Xiuxia,DONG Wenhai.Flight Simulation System For Transport Aircraft Heavyweight Airdrop Based On JSBSim[J].Computer Applications and Software,2012,29(10):65-68.
[6]Berndt J S.JSBSim:An open source flight dynamics model[J].C++Aiaa,2004:204-4923.
[7]Berndt J S,De Marco A.Progress on and usage of the open source flight dynamics model software library,JSBSim[C]//AIAA modeling and simulation technologies conference,Chicago,Illinois,USA.2009:10-12.
[8]Fortis A E,Balint S,Fortis T F.The dependence of the period and range of the oscillations on the elevator deflection for the ADMIRE simplified model[C]//P2P,Parallel,Grid,Cloud and Internet Computing(3PGCIC),2013 EighthInternationalConferenceon.IEEE,2013:665-670.
[9]Gomez F J,Miikkulainen R.Active guidance for a finless rocket using neuroevolution[C]//Genetic and Evolutionary Computation Conference.Springer Berlin Heidelberg,2003:2084-2095.
[10]Åström K J,Hägglund T.Advanced PID control[C]// ISA-The Instrumentation,Systems and Automation Society,2006.
[11]Åström K J,Hägglund T.Revisiting the Ziegler-Nichols step response method for PID control[J].Journal of process control,2004,14(6):635-650.
[12]Visioli A.Practical PID control[M].London:Springer Science&Business Media,2006.
Cessna-172P Autopilot Wing Leveler Ziegler-Nichols PID Control Method
ZHAO Xinye1,2LIANG Haiming1SUN Guangming1YANG Fan2
(1.Dalian Naval Academy,Dalian116018)(2.Naval Aeronautical and Astronautical University,Yantai264001)
In order to solve the chosen problem of Cessna-172P autopilot wing leveler PID control parameters,Ziegler-Nichols method is proposed.Ziegler-Nichols PID controller the adaptive PID controller doesn't need any prior knowledge of the process and build any process model,and can keep the control loop operating efficiently.The method can control Cessna-172P autopilot wing leveler adaptively,which is implemented in JSBSim flight simulation system.Simulation experiments display the controller has a better dynamic respond performance in overall situation.
autopilot,wing leveler,Ziegler-Nichols,PID Control,JSBSim
TP13
10.3969/j.issn.1672-9722.2017.06.015
2016年12月11日,
2017年1月24日
赵鑫业,男,博士,讲师,研究方向:作战仿真,飞行仿真。梁海明,男,硕士研究生,研究方向:雷达仿真。孙光明,男,助理研究员,研究方向:作战软件开发。杨帆,男,讲师,研究方向:深度学习、聚类分析。
猜你喜欢
化工自动化及仪表(2021年6期)2021-11-26
智能制造(2021年4期)2021-11-04
北京航空航天大学学报(2020年10期)2020-11-14
民用飞机设计与研究(2020年1期)2020-05-21
天津教育·下(2018年9期)2018-07-13
北京航空航天大学学报(2017年3期)2017-11-23
教练机(2017年3期)2017-11-09
自动化仪表(2017年8期)2017-08-30
航空学报(2015年4期)2015-05-07
振动、测试与诊断(2014年5期)2014-03-01
