用于往复锯的传动机构
2017-06-22 14:48:13授权公告号CN103372683B
电动工具 2017年3期
授权公告号:CN103372683B
授权公告日:2017.05.31
专利权人:博世电动工具(中国)有限公司
发明人:王彦超
发明解读
用于往复锯的传动机构
授权公告号:CN103372683B
授权公告日:2017.05.31
专利权人:博世电动工具(中国)有限公司
发明人:王彦超
在现有的由电机驱动的电动往复锯中,电机的转动通过“曲柄机构(SCOTCH YOKE)”被转换为往复杆的直线往复运动,该曲柄机构通常具有图1和图2所示的两种型式。
在图1所示的曲柄传动机构中,电机驱动锥齿轮3使其转动,锥齿轮3与伞齿轮2啮 合,从而使伞齿轮2绕着转动轴线4转动。偏心销5相对于伞齿轮2的转动轴线4偏心地安装在 伞齿轮2上,并可滑动地嵌装在往复杆1的一端处的滑槽7内。往复杆1受套装在其上的引导 机构约束而仅能产生直线运动。从而,当锥齿轮3带动伞齿轮2连续转动时,往复杆1在偏心 销5的作用下产生往复运动6,进而可带动安装在往复杆1的另一端上的锯条产生往复锯切 运动。在该曲柄传动机构中,锥齿轮3的转动轴线与伞齿轮2的转动轴线4正交。在图2所示的曲柄传动机构中,示意性示出的齿轮23的转动轴线与齿轮22的转动 轴线24平行,但其工作原理与图1示出的曲柄传动机构完全相同。根据实际经验,除了如上所述的直线往复运动以外,往复锯的锯片在锯切深度方 向B(锯切平面)上的摆动动作对锯切速度有着重要影响。
美国专利申请US5392519A公开了一种往复锯,其具有与伞齿轮32的转动轴线38平 行的摆动动作37,如图3所示。
该摆动动作37由伞齿轮32上的偏心圆柱体35产生,该偏心圆 柱体35的中心轴线与伞齿轮32的转动轴线38平行并间隔开一段距离。具体地讲,偏心圆柱 体35与杆36的第一端(图3中的下端)配合,杆36的另一端(图3中的上端)铰接到往复杆1的后端。当往复锯工作时,偏心圆柱体35会推动杆36的第一端,进而会促使往复杆1沿摆动方向37摆动。
欧洲专利申请EP0561473A1公开了另一种往复锯,如图4所示。
其具有与伞齿轮42 的转动轴线44垂直的摆动方向48。具体地讲,该往复锯包括设置在伞齿轮42上的偏心圆柱 体46,往复杆1具有滑槽结构47,偏心圆柱体46可滑动地嵌装在该滑槽结构47内。当伞齿轮 42绕着转动轴线44转动时,往复杆1的滑槽结构47被偏心圆柱体46推动而使往复杆1沿摆动 方向48摆动。
根据以上描述,可知现有的往复锯的摆动动作的上述实现方法具有以下不足:
1)摆动机构难以用于小型往复锯或便携式往复锯中。
2)在图4示出的这种往复锯中,当偏心地安装在伞齿轮42上的偏心销45带动往复 杆1直线往复运动时,可产生大的摩擦,甚至会使机构卡死。如果由于磨损而产生较大的间 隙时,则会降低摆动幅度。
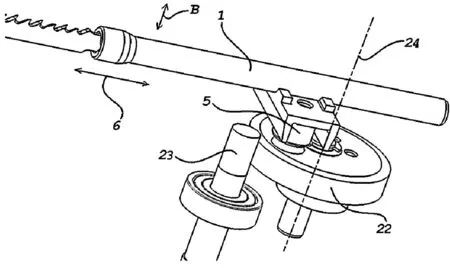
图2
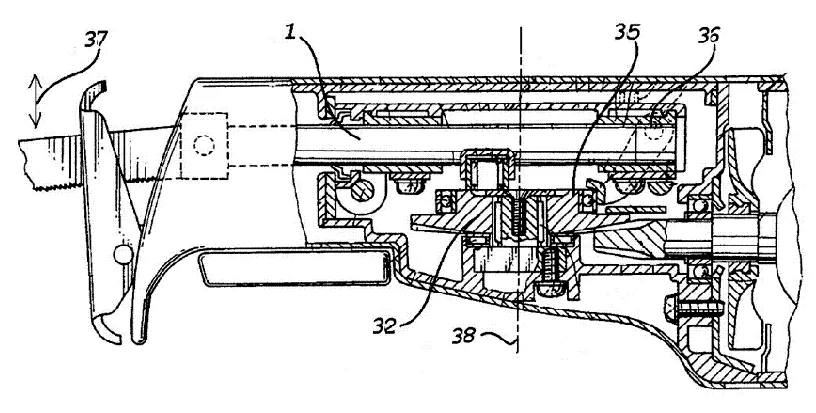
图3
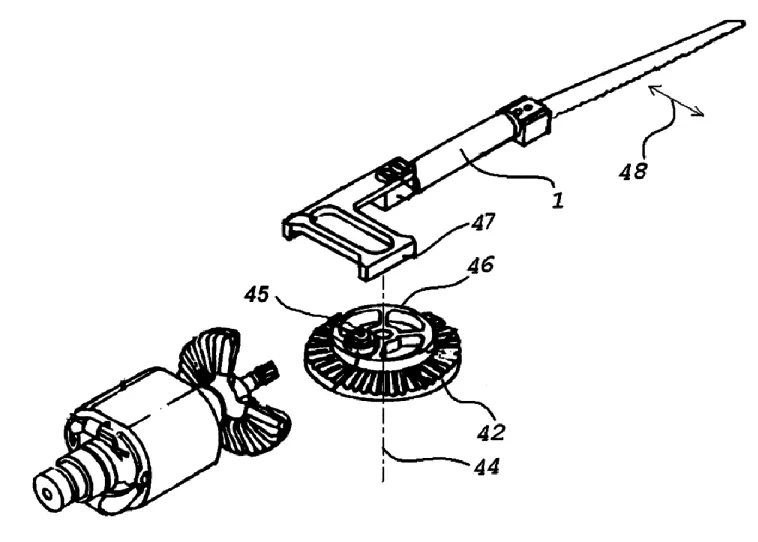
图4
发明内容:
该发明的目的是提供一种能够克服上述缺点的用于往复锯的传动机构。包括:驱动机构;被驱动机构驱动而转动的偏心轮;被偏心轮驱动产生线性往复运动的往复杆;其特征在于,传动机构还包括一能被上述偏心轮驱动的摆动部件,摆动部件在被偏心轮驱动时,能驱动上述往复杆沿与直线往复运动相交的方向运动。摆动部件具有第一臂和第二臂,第二臂与偏心轮相互作用,而使摆动部件偏转,从而带动第一臂与往复杆相互作用,使往复杆沿与上述线性往复运动相交的方向运动。这使得可使摆动部件具有更为简单的结构形式。
往复锯包括用于罩盖驱动机构和偏心轮的壳罩,摆动部件可转动地设置在壳罩上。这样,可以使得摆动部件布置得更为紧凑、可靠,且便于装配。往复锯包括用于罩盖驱动机构和偏心轮的壳罩,壳罩上设有槽,摆动部件至少部分可转动地嵌装在所述槽内。这可进一步简化摆动部件的安装。往复杆的一端设有滑槽,滑槽沿与上述线性方向垂直的方向延伸,偏心轮可滑动地嵌装在滑槽内。在偏心轮的转动过程中,偏心轮的一部分能够从滑槽内伸出。通过这种方式,可使摆动部件更容易地与偏心轮相互作用。
第二臂具有伸到滑槽的侧面的用于与偏心轮相互作用的触动部分。这进一步简化了摆动部件的结构。第二臂的用于与偏心轮相互作用的触动部分具有渐变切向接触部,以减小偏心轮与触动部分接触时的冲击作用。通过这种方式,可使第二臂与偏心轮的接触更为平稳,避免剧烈接触,从而提高了摆动动作的可靠性。偏心轮设有用于减小摩擦的滚动件;和/或所述摆动部件的与往复杆相互作用的部位设有用于减小摩擦的滚动件。这可将滑动摩擦转换为滚动摩擦,从而降低接触摩擦。滑槽的顶部设有用于与摆动部件相互作用的凸出部,且第一臂设置在滑槽上方。通过这种布置方式,可使摆动动作的实施方式更为简单、可靠。
往复锯还具有用于摆动部件的复位机构,复位机构使摆动部件在未与偏心轮相互作用时保持在预定位置处。从而可使得摆动部件始终平稳、可靠地与偏心轮接触。引导往复杆使其直线往复运动的衬套能够使往复杆沿与直线往复运动相交的方向运动。提供了一种可靠的摆动动作实现方式。
该发明的有益的技术效果是:
1)摆动部件足够紧凑而能够实施在高度紧凑的小型往复锯中。
2)摆动动作的驱使者是偏心轮,而该偏心轮同时还驱动往复杆往复运动,从而,相 应的机械机构与现有技术相比更为简单。
3)摆动部件的接触部位可均为滚动摩擦,因此使得摆动部件、进而使得往复锯可靠耐用。
4)通过调整或更换摆动部件,可方便地调节摆动动作的幅度和持续时间,从而可实现不同的摆动特性。
实施方式:
图5和图6详细地描述该发明的一个示例性实施例,以便能够更好地理解该发明的基本原理。
图5为小型往复锯100的示意性剖视图。该小型往复锯100包括由电机驱动的锥齿轮103,该锥齿轮103与伞齿轮102相啮合而可带动伞 齿轮102旋转。偏心销111与伞齿轮102的转动轴线平行地设置在伞齿轮102上。该小型往复锯100还具有往复杆101,该往复杆101的一端用于与锯片(未示出)连接,以使锯片产生相应的直线往复运动。往复杆101的另一端设有滑槽结构117。该滑槽结构117具有用于与伞齿轮 102上的偏心销111配合的滑槽118。往复杆101设置在衬套107中,并受衬套107的引导而仅 能在衬套107中直线往复运动。因此,当电机通过锥齿轮103使伞齿轮102沿顺时针方向转动 (如图5所示)时,偏心销111也会随之转动,进而通过滑槽结构117使往复杆101产生直线往复运动115。如上所述,往复锯100的锯片除了直线往复运动以外,在切割的深度方向(即切割平面)上产生一定的摆动动作116(参看图5)也是非常意义的,例如可以明显提高切割速度。 该摆动动作116通过使往复杆101连同衬套107一起相对于往复锯100的壳体摆动而产生。
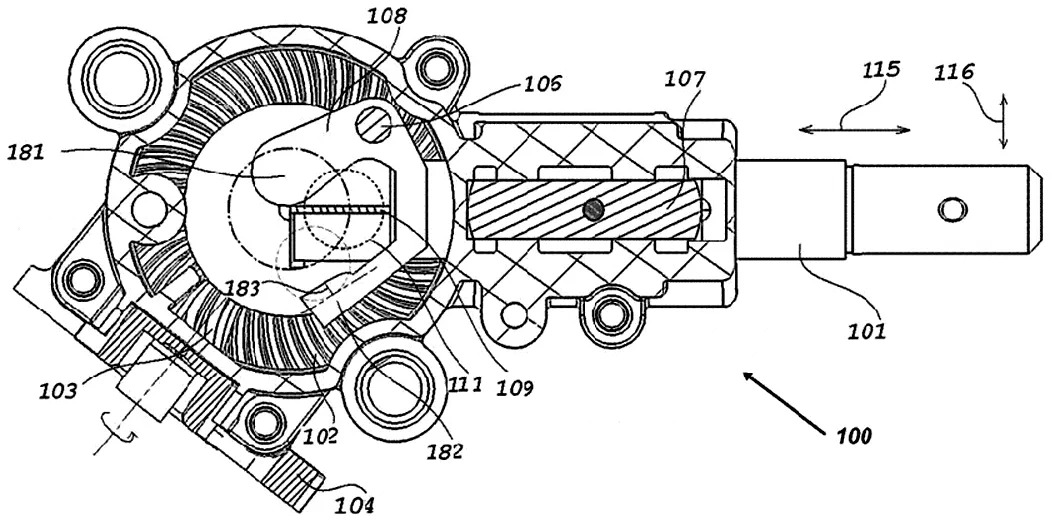
图5
在图6的示例性实施例中,为了产生摆动动作116,往复锯100还包括摆动部件108。在一个示例性实施例中,该摆动部件108通过销106可转动地装配在面向偏心销111的第一齿轮罩部分105上。摆动部件108具有分别位于销106的两侧的第一臂181和第二臂182。在偏心销111随伞齿轮102一同转动的过程中,在设定区间,偏心销111的外周部分可部分露 出滑槽118,即,滑槽118的长度使得偏心销111的外周部分在转动过程中会部分露出。由于衬套107的约束引导作用,在转动过程中,偏心销111只是从滑槽118的两敞口端露出一部 分,而不会完全脱离滑槽118。如图5所示,当偏心销111随伞齿轮102一起转动(在图5中,沿顺时针方向转动)时,偏心销111会在转动过程中部分露出而切向地接触摆动部件108的第二臂182的向下延伸的触动部分183。在这种作用下,会使得摆动部件108绕着销106产生逆 时针转动。从而,摆动部件108的第一臂181推动设置在滑槽结构117的顶部的凸出部109,以 使往复杆101摆动小的角度而产生摆动动作116。
需要指出的是,在图6示出的示例性实施例中,往复杆101上设有贯通的细长槽119,往复锯100的第二齿轮罩部分104上设有与该细长槽119配合的销120,且衬套107上设有贯穿整个衬套107的通孔121。在组装状态下,衬套107套装在往复杆101上,并使销120穿 过通孔121和细长槽19,从而仅允许往复杆101在衬套107中直线往复运动。而且,衬套107又被第一、第二齿轮罩部分105和104包围着。在上述摆动部件108的驱动下,往复杆101连同衬套107能一起在第一、第二齿轮罩部分105和104内产生一定幅度的摆动动作。当伞齿轮102连续转动时,每转动一圈,摆动部件108会被偏心销111推动一次,从而,在一个往复行程内会使往复杆101产生一次摆动动作。摆动动作的幅度和持续时间可通过摆动部件108的第一臂181和/或第二臂182(其触动部分183)的形状和结构控制。根据需要,也可在结构空间允许的情况下设置多个触动部分183或设置多个 摆动部件108,从而可在一个往复行程内使往复杆101产生多次摆动动作。根据一个示例性实施例,如图5所示,可使第二臂182的触动部分183具有用于偏心 销111的切向渐变结构,以使偏心销111能够平稳地接触触动部分183,目的是降低偏心销 111在与触动部分183开始接触时可能产生的冲击,从而防止损坏结构和产生噪声。 为了降低摩擦,可在偏心销111上套装一个滚动件、例如轴承,如图6所示,以将滑 动摩擦变换为滚动摩擦。在这种情况下,偏心销111实际上包括滚动件,滚动件的外周与滑 槽118的壁滚动接触。类似地,也可在第一臂181上的与凸出部109接触的部位处设置一个滚动件,以将摆动部件108的第一臂181与凸出部109之间的滑动摩擦转换为滚动摩擦,从而,可提高机械 机构的耐用性。
图5和6详细描述了该发明的一个示例性实施例。相关技术人员通过该描述应知,该发明的基本原理是:通过设置一个摆动部件108,使偏心销111的转动不仅可以转换为往复杆101的直线往复运动,而且还可转换为往复杆101的摆动动作。显然,在这一基本原理下,该发明可以多种实施方式实施,而不局限于上述实施例。下面,就对可能的其他实施方式进行描述。对于凸出部109,其并不是必须设置在滑槽结构117上,而是也可以设置在往复杆 101的其他任何合适位置处,这是因为只要凸出部109设置在往复杆101上就可使摆动部件 108带动往复杆101摆动。显然,尽管凸出部109在此为板状,但也可以采用其他任何形式,只要它能与摆动部件108正确地相互作用即可。对于摆动部件108,其除了可以如上所述地通过销106可转动地安装在第一齿轮罩 部分105上以外,还可在第一齿轮罩部分105中构造出一个槽,将摆动部件108嵌装在所述槽中,当摆动部件108的一个部位、例如第二臂182被偏心销111推动时,摆动部件108的另一部位、例如第一臂181在槽的引导作用下可对往复杆101上的合适部位、例如凸出部109产 生推动作用,以使往复杆101产生摆动动作。对于电动工具领域的技术人员来说,显然只要摆动部件108能够将偏心销111的转动至少部分转换为往复杆101的摆动动作即可。在这一原则下, 也可将摆动部件108装配在其他任何合适的部件上,而非仅限制于安装在第一齿轮罩部分 105上。如上所述,摆动部件108的第二臂182的触动部分183从滑槽118的侧面接触从滑槽 118部分露出的偏心销111,这需要偏心销111在转动过程中能够从滑槽118部分露出,然而,也可使偏心销111在安装状态下其上部分位于滑槽118内,而其邻近伞齿轮102的下半部分始终位于滑槽118外,在这种情况下,可使摆动部件108的第二臂182接触偏心销111的下半部分。在某种情况下,甚至可使触动部分183伸入滑槽118内与偏心销111接触。即,只要能使偏心销111在转动过程中与摆动部件108的第二臂182相互作用即可。还可考虑为摆动部件108配置一个复位机构(未示出),该复位机构可使摆动部件108的第二臂182与偏心销111相互作用结束时使摆动部件108回到一个合适的初始位 置,在该初始位置,偏心销111可在下一圈转动过程中正确地且平稳地与第二臂182产生接 触。通过设置这样一个复位机构,可使摆动部件108在与即将到来的偏心销111相互作用之 前保持在合适位置处,从而能够确保偏心销111与摆动部件108始终可靠地相互作用。作为一个例子,该复位机构可以为弹簧。
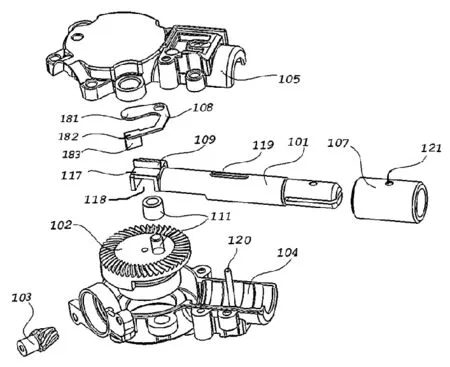
图6
猜你喜欢
轴承(2022年1期)2022-06-07 10:25:56
科技与创新(2021年15期)2021-11-28 02:42:43
中学生数理化·八年级物理人教版(2021年6期)2021-11-22 07:49:50
内燃机与配件(2021年17期)2021-09-14 02:42:26
演艺科技(2021年7期)2021-09-01 08:32:34
物流技术与应用(2021年1期)2021-03-22 09:25:38
橡塑技术与装备(2021年2期)2021-02-01 03:36:18
装备制造技术(2020年9期)2021-01-26 00:15:14
科学导报·学术(2020年55期)2020-02-22 00:47:16
中国金属通报(2019年4期)2019-07-29 02:00:50