马丁代克深度轮误差校正系统设计
2017-06-22 14:05:34朱普茂丁频一
传感技术学报 2017年6期
朱普茂,章 鹏*,丁频一,黄 静
(1.重庆大学光电技术及系统教育部重点实验室,重庆 400044;2.公安部交通管理科学研究所,江苏 无锡 214000 3.北京天擎丽都科技有限公司,北京 101102)
马丁代克深度轮误差校正系统设计
朱普茂1,章 鹏1*,丁频一2,黄 静3
(1.重庆大学光电技术及系统教育部重点实验室,重庆 400044;2.公安部交通管理科学研究所,江苏 无锡 214000 3.北京天擎丽都科技有限公司,北京 101102)
为了修正测井过程中因马丁代克深度轮磨损而造成的深度信息误差,设计了一套马丁代克深度轮误差校正系统,通过分析误差产生原因以及误差校正原理,选择线性光栅尺作为长度测量基准,比较光栅尺和深度轮旋转编码器的测量结果,实现误差校正。最后,采用已经在标准井中使用套管节箍信号法校正的2530型马丁代克深度轮对系统进行测试实验,实验结果表明该系统的设计精度符合设计要求,具有速度快、时间短、精度高等优点。
马丁代克;误差校正;虚拟仪器;编码器
在石油测井行业中,根据测量信号的传输方式不同,可以将其可以分为电缆测井,随钻测井和井下存储式测井。电缆测井因其具有测井项目比较多样化、施工条件相对简单、获得测井数据资料质量高、可靠性好等优点,是目前使用最普遍的测井方式[1]。
马丁代克测深系统是目前电缆测井中运用较为广泛的深度测量设备,其核心组件是深度轮。测井时,通过将电缆的长度转化为深度轮的旋转圈数,从而可以实时得到井下测量设备的所在深度。不同的深度对应着不同测井信息(如电阻率、孔隙度等),因此深度信息的准确性、可靠性对后期获取高质量地测井资料至关重要[2-3]。
在测井过程中,深度轮长期与电缆接触,导致其表面受到磨损,周长发生改变,使得深度轮上的光电编码器输出的脉冲对应的电缆运动距离也发生了改变,从而导致深度信息的积累性误差。实际使用中,深度轮的使用周期一般为6个月,之后应该对其进行校正,否则会导致深度数据偏差,影响后期测井数据分析。当深度轮使用频率更高时,校正周期也将更短。
目前常用的校正方法有电缆地面磁标定法[4-5]、套管节箍信号法[6]。然而,电缆地面磁标定法耗时长、并且没有考虑电缆拉伸后的变化情况;套管节箍信号法虽然精度高,但是成本高、耗时长,并且受到标准井位置的限制。因此,急需一种能够快速对深度轮进行校正的系统。
通过分析电缆测井原理、误差产生原因和误差校正原理,本文提出了一套马丁代克测深系统深度轮的误差校正方案,并搭建了测试系统。系统采用了高精度的线性光栅尺作为长度测量基准,得到误差校正系数,并与采用套管节箍信号法在标准井中得到误差校正系数进行对比,验证系统的可靠性、稳定性。系统软件采用虚拟仪器技术、模块化编程设计,使得系统具有扩展性强优点,为后期系统升级维护提供便利。
1 深度轮误差校正系统设计原理
1.1 马丁代克测深系统工作原理
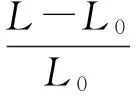
电缆测井原理示意图如1所示,马丁代克测深系统的深度轮在井下仪器的重力作用下不断转动,深度轮上的旋转光电编码器开始输出正交编码脉冲,通过对输出脉冲进行计数,经后期分析计算,就可求得电缆运动距离,从而求得测井仪器的下放深度。深度H计算公式为

(1)
式中:L0为理论上深度轮转动一圈对应电缆经过的距离,可以认为是深度轮的理论周长。k为光电编码器输出脉冲数,k0为编码器线数(旋转一周输出的脉冲数)。
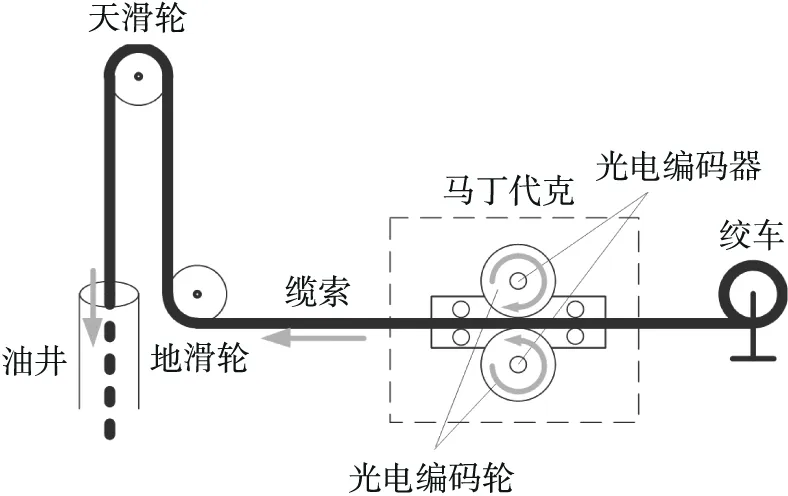
图1 电缆测井原理图
马丁代克测深系统长期使用后,其工作时由于深度轮与电缆外层的铠甲钢丝层一直保持接触,深度轮表面不可避免地会发生磨损,导致其周长由L0变成L,当电缆经过同样的距离时,k变大,造成计算出的H偏大,从而引起深度测量的积累性误差。考虑到深度轮磨损的不均匀性,实际工作环境等因素,不能简单的通过测量其直径,再通过公式求出周长。
1.2 校正系统设计原理
测井过程中,由于测井设备自身重量达数百公斤,加上在井内受浮力、摩擦力、泥浆压力及温度变化等其他因素的影响,导致电缆发生拉伸变形,直径变小,和马丁代克深度轮的接触状态会产生微小的变化[7]。实际生产中发现,这些变化将会导致深度测量读数产生变化。
综合考虑到以上几点因素,结合测深系统实际工作条件,本文采用直接测量深度轮形变后的周长,其原理示意图如图2所示,使用电缆带动深度轮转动一周,深度轮在没有磨损情况下,其运动一周对应的电缆长度为L0(深度轮与电缆的接触点从A0点到B0点)。依据深度轮同轴的旋转光电编码器判断其转动情况,以这两点为测量点,在磨损的情况下,使用高精度的光栅尺测得这段运动经过的距离[8]。即深度轮转动一周对应电缆经过的实际长度L,最后将其和理论长度L0对比,按式(2)计算就可得到误差校正系数C。
(2)

图2 深度轮测深原理
得到误差校正系数后,今后使用该深度轮进行测井作业时,将测得深度除以1+C,即可得到排除深度轮磨损因素后的准确测井深度。
2 系统设计
2.1 设计要求
根据标准井校验数据经验,使用时间不同的测深系统,考虑到制造误差与磨损,其深度轮误差校正系数C通常在-0.8‰~+0.2‰范围内。
2.2 系统总体结构
系统由4个模块组成:运动模块、数据采集模块、供电模块、数据处理模块。运动模块主要包括步进电机、伺服电机、丝杆、电缆、绞盘等部件;数据采集模块包括光栅尺、旋转编码器、拉力计、PCI采集卡;供电模块将220 V交流电转换为相应的直流电压,为各个模块供电;数据处理模块主要负责对采集的数据进行后期处理。系统各个模块的总体机械架构图如图3所示。其具体工作方式为:步进电机的运动带动丝杆转动,丝杆的转动使得测深系统和光栅尺头的移动;光栅尺和编码器产生的脉冲通过数据采集卡输入到计算机中,计算机对采集的数据进行后期处理。

图3 系统总体结构框图
系统功能框图如图4所示,运动控制卡发出脉冲控制信号同时控制步进电机与伺服电机;计数采集卡读取旋转编码器与光栅尺输出的正交编码信号经过采集卡传输到计算机进行处理。拉力计的输出作为反馈信号,经过放大,输入到控制卡的AC/DC转换模块,控制电缆的拉力大小。
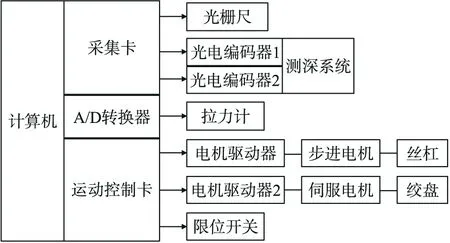
图4 系统功能示意图
2.3 硬件设计
系统的硬件分3个模块:运动控制模块、数据采集模块、供电模块。
运动控制模块核心部件主要是步进电机、伺服电机、控制卡。为提高系统测量精度,采用NI公司的ST34-1混合式步进电机控制丝杆的移动,其细分步数为20 000,步距角可达0.018°,可靠性强[9];从而能够精确的控制丝杆转动距离。伺服电机采用MOTEC公司的SEM120E1510交流伺服电机,其控制信号如图5所示。只需改变方向控制信号,就能控制电机的运动方向。运动控制模块的核心是控制卡,控制卡必须能够同时控制步进电机和伺服电机。因此必须保证控制卡拥有2路轴;所以采用了NI公司的PCI-7332型控制卡。其与计算机的通信方式采用PCI总线。并且LabVIEW拥有丰富的该型号控制卡的接口函数[10],方便后期软件开发。

图5 脉冲+方向控制模式波形
数据采集模块包含光电编码器、光栅尺、采集卡、拉力计。光栅尺选择了FAGOR公司的GW-940-3型封闭式增量光栅尺,其最大测量长度为940 mm,拥有0.1 μm的高精度分辨率,可以满足精度设计要求;并且其输出信号为正交编码信号。采集卡使用的是 PCI-6602型计数卡,它能够读取多路TTL正交编码,抗干扰能力强,并且可以对输入信号进行滤波,去除抖动与毛刺,非常适合本系统中深度轮编码器与光栅尺输出的正交编码脉冲的采集与计数。拉力计的数据通过A/D转换后输入到采集卡,得到电缆当前所受拉力。系统由3个限位开关信号,分别为正向限位、起始点HOME、反向限位信号,它们作为反馈信号控制电机的停止、反转以及采集卡开始、停止计数信号。
供电模块包含直流电源、空气开关、EMI滤波器。直流电源主要给编码器、光栅尺、拉力计、电机等供电,不同设备需要提供不同电压,系统使用了PS-15、PS-13等型号电源,可以分别提供24 V、48 V等大小的电压;空气开关可以在工作电流超过额定电流、短路、失压等情况下为系统提供保护。为了防止外部电源信号的干扰,采用EMI滤波器为系统提供屏蔽,屏蔽开关电源产生的干扰信号[11],提高系统的抗干扰能力。
由于系统信号的采集都是使用数据采集卡,输入信号频率不同,并且采集卡输入引脚密集,因此为了防止系统信号间的相互干扰,系统采用了电磁兼容性良好的双绞线作为信号传输线[12]。
2.4 软件设计
虚拟仪器可以将测量仪器和计算机相结合,利用计算机强大的数据处理和控制能力,从而控制测量仪器,分析数据。具有扩展性强、高度模块化设计、成本低等优点[13-14]。
因此,本系统软件设计采用了基于LabVIEW[15]的虚拟仪器,软件设计主要包括运动控制模块、数据采集模块、数据处理模块。其程序模块主要功能示意图如图6所示。
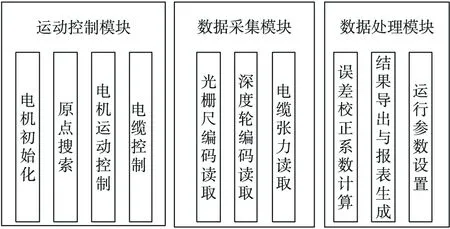
图6 系统软件模块示意图
运动控制模块程序主要控制步进电机和伺服电机的转动以及电缆拉力控制,包含设置电机速度、加速度、控制模式等初始化操作。结合拉力计和限位开关的反馈信号,调整电机运行状态。每次测量都需要确定此次测量的起点和结束点,主要采用限位开关来实现这一功能。HOME限位信号控制测量计数的开始,反向限位信号控制计数的停止。电机控制程序主要控制电机运动状态,如电机运动的加速度,步长等;电缆控制采用主要控制电缆张力大小,通过张力计大小反馈控制电缆所受拉力大小。
采集模块程序模块主要采集光栅尺、旋转编码器、拉力计的输出信号。为了使程序能够对数据进行同步处理,程序采用了生产者/消费者结构[16]。生产者将数据放入消息处理队列,消费者从消息队列中取出数据进行处理。
数据处理程序对输入的数据进行分析并保存,并结合式(1)、式(2),得到误差校正系数。
3 实验验证
为了验证该系统的可靠性,对一台已经通过标准井进行标定的2530型马丁代克测深系统进行误差校正系数测量,得到其深度轮理论周长609.6 mm。实验设备及环境如图7所示。

图7 实验环境与设备
实验过程中,为了模拟马丁代克的实际工作环境,对电缆施加1 000磅的拉力来模拟实际工作中电缆受到井下仪器的拉力,测试并记录测量结果,并计算出校正系数。结果如表1所示。

表1 误差系数计算结果

当选取显著度0.01,测量次数为10次时,t分布的检验系数K(10,0.01)为3.54,根据罗曼诺夫斯基准则:

(3)
因此可以认为第2次测量结果不是粗大误差。
为了判断测量序列有无系统误差,将测量序列的残余误差作图进行观察,x轴为测量序列号,y轴为残余误差,结果如图8所示。由于残余误差大体上是正负相间,且无显著变化规律,因此可以认为没有系统误差。
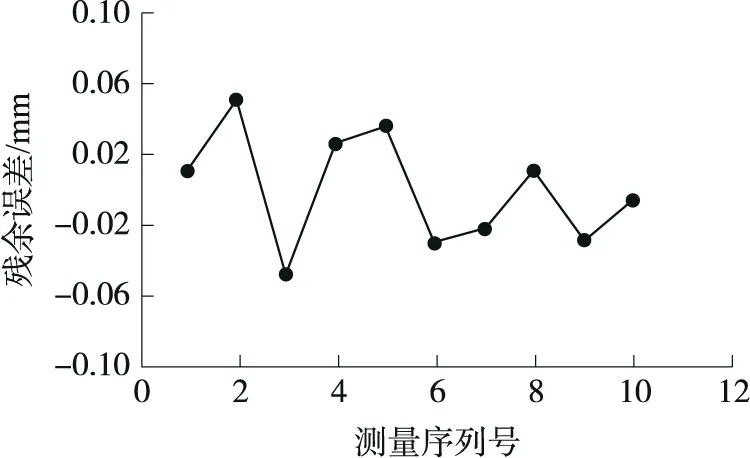
图8 残余误差
综上所述,本次测量没有粗大误差和系统误差,并且校正系数C都处于-0.8‰~+0.2‰范围内,达到了设计精度要求。
深度轮采用本系统测量的周长是609.585 3 mm,其实际周长为609.6 mm。可以确定该型马丁代克深度轮的修正值为-0.014 7 mm。校正系数为-0.024‰。以后该型马丁代克测深系统在实际使用过程中,可以使用该值加以修正。
4 结论
本文结合马丁代克测深系统测量的原理,针对因深度轮的磨损以及电缆的受拉变形带来的误差,介绍了其误差校正的理论,提出了一种快速有效的解决方案,并给出了系统总体设计方案。搭建了校正系统并进行了实验论证,可以得出结论:该设计系统能够对马丁代克深度轮进行校正;和现有的校正仪器相比具有时间短、操作简单、成本低等优点。
由于实验条件限制,只对2530型号的马丁代克深度轮进行了校正实验,今后任务将是对更多型号进行测试,并进行误差分析,改进系统,提高测量精度。
[1] 申本科,赵红兵,宋相辉,等. 电缆测井、随钻测井和过套管测井研究[J]. 国外测井技术,2011,31(1):10-14.
[2] 李军,蔡风波,唐振欢. 马丁代克编码器深度系统改造[J]. 石油仪器,2007,21(6):92-94.
[3] 杨云杰,徐翠,宋佳,等. 马丁代克深度报警校正装置的设计[J]. 石油仪器,2012,26(6):18-19.
[4] 王一民,于晓红,边艳玉,等. 测井电缆地面自动磁标定系统设计[J]. 自动化与仪器仪表,2014,0(6):86-87.
[5] Seoktae Kim,Cam Nguyen.A Displacement Measurement Technique Using Millimeter-Wave[J]. Interferometry IEEE Transactions on Microwave Theory and Techniques,2003,51(6):1724-1728.
[6] 刘江伟,李建华,叶文军,等. 测井电缆深度记号标定新方法实现的研究与应用[J]. 测井技术,2007,31(6):580-582.
[7] 刘永宏. 测井电缆长度误差剖析和处理[J]. 西部探矿工程,2006,18(11):182-183.
[8] 曹敬春,樊玉芳,毕世锋,等. 测井深度误差原因及自动化校深方法研究[J]. 国外测井技术,2014,(3):54-55.
[9] Bodson M,Chiasson J N,Novotnak R T. High-Performance Nonlinear Feedback Control of a Permanent Magnet Stepper Motor[J]. IEEE Transactions on Control Systems Technology,1993,1(1):5-14.
[10] 王峰,刘兴智,李国荣. 基于PCI-6232和LabVIEW的发动机防喘振性能试验数据采集系统设计[J]. 航空维修与工程,2016,0(2):74-77.
[11] 郑宪龙,和军平,唐志. DC/DC开关电源有源共模EMI滤波器的研制[J]. 电力电子技术,2007,41(12):45-47.
[12] 赵乾,钱建平,郭恩全,等. 双绞线电磁干扰防护研究[J]. 电子测量与仪器学报,2010,24(3):279-282.
[13] 马进,赵洪亮,卫永琴,等. 虚拟仪器在电子技术实验中的应用研究[J]. 中国仪器仪表,2016,0(7):43-46.
[14] 宁涛. 虚拟仪器技术及其新进展[J]. 仪器仪表学报,2007(S1):252-254.
[15] 周国全,孙东振,彭获然. 基于LabVIEW平台的新型二维微位移传感器设计[J]. 传感技术学报,2015,28(4):607-612.
[16] 雷晏瑶,李智. 基于生产者/消费者的数据采集系统设计[J]. 机械,2011,38(9):39-43.
[17] 刘渊. 误差理论与数据处理[D]. 辽宁:大连理工大学,2009.
The Calibration System of Martin Decker Depth Wheel
ZHU Pumao1,ZHANG Peng1*,DING Pinyi2,HUANG Jing3
(1.Key Lab for Opto-Electronic Technology and System of Ministry of Education,Chongqing University,Chongqing 400044,China; 2.Traffic Management Research Institute of the Ministry of Public Security,Wuxi Jiangsu 214000,China;3.Beijing Tianqing Lido Technology Co.,Ltd,Beijing 101149,China)
In order to correct the depth information error caused by the abrasion of the Martin Decker deep wheel in well-logging,the paper introducea Martin Decker depth wheel calibration system.It presents the error causes and rectification theory. Grating-rule sensor is used to measure length. Martin Decker depth wheel calibration is realized by comparing the measurement results of the grating-rule sensor and the depth wheel rotary encoder.Finally,experiments have been carried out by 2530 Martin Decker depth wheel system,which has been calibrated using the casing collar logging(CCL)method in a standard well.The result shows that the design accuracy of the system is in accordance with the design requirements,and it has the advantages of high speed,fast and high precision.
Martin Decker;error correction;virtual instrument;encoder

朱普茂(1991-),男,2014年于重庆大学获得学士学位,2014年在重庆大学光电学院攻读硕士学位,主要研究方向为仪器科学与技术,15123339336@163.com;

章 鹏(1970-),男,2002年于重庆大学获得硕士学位,2005年于重庆大学获得博士学位,现为重庆大学副教授、硕士生导师,主要研究方向为传感器技术、信号处理、智能结构健康状态监测,zhangpeng@cqu.edu.cn;

丁频一(1991-),男,2013年于重庆大学获得学士学位,2016年于重庆大学获得硕士学位。现为公安部交通管理科学研究所的研究实习员,主要研究方向为交通产品的标准化,539836621@qq.com;

黄 静(1982-),女,2004年于河南工业大学获得学士学位,2007年于北京工业大学获得硕士学位。现为北京天擎丽都科技有限公司机械工程师,主要研究方向为机械结构设计,2693849831@qq.com。
2016-11-24 修改日期:2017-02-08
TP273.5;TH711
A
1004-1699(2017)06-0867-05
C:7230
10.3969/j.issn.1004-1699.2017.06.011
猜你喜欢
测井技术(2022年3期)2022-11-25 21:41:51
工程与试验(2022年2期)2022-08-08 12:37:30
中国煤层气(2021年5期)2021-03-02 05:53:12
商品与质量(2020年53期)2020-11-27 03:07:42
国学(2020年1期)2020-06-29 15:15:30
精密制造与自动化(2018年1期)2018-04-12 07:42:52
数学物理学报(2017年6期)2018-01-22 02:26:53
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
中国煤层气(2015年4期)2015-08-22 03:28:01
中国质量与标准导报(2015年2期)2015-02-28 22:27:15