多传感器交叉提示技术在UCAV侦察任务中的应用研究
2017-06-22 14:05:34黄树彩刘锦昌韦道知夏训辉
传感技术学报 2017年6期
庞 策,黄树彩,刘锦昌,韦道知,夏训辉
(空军工程大学 防空反导学院,西安 710051)
多传感器交叉提示技术在UCAV侦察任务中的应用研究
庞 策,黄树彩*,刘锦昌,韦道知,夏训辉
(空军工程大学 防空反导学院,西安 710051)
多UCAV在协同执行对多目标的侦察任务过程中,若某一UCAV被摧毁,则该UCAV所承担的子任务将不能完成。为解决此问题,将多传感器交叉提示技术应用到多UCAV系统当中,以此顺利实现目标交接。首先引入多Agent技术,提出了基于多Agent技术的传感器分布式管理结构。其次,将采用多传感器交叉提示技术的多UCAV作战场景用数学语言描述,构建数学模型。然后,在考虑使航线相异度最小和长度最短的条件下,提出基于改进人工蜂群算法的UCAV飞行航线优化方法。最后,重点研究多传感器资源动态控制过程,为实现任务交接,提出基于拍卖理论的多传感器交叉提示算法。仿真结果表明,论文所提出的模型具有合理性,方法具有有效性。
多传感器交叉提示;多智能体;分布式算法;拍卖理论;人工蜂群算法
目前关于传感器管理的研究主要是关于多传感器多任务静态分配问题[1-2],而对任务分配后各个传感器在执行任务过程当中的动态协调问题研究较少,多传感器交叉提示技术就是针对这一情况提出并发展起来的。就多传感器交叉提示定义来说,就是多个传感器在执行任务过程当中,一个传感器提示另一个传感器,被提示传感器直接对目标获取关于目标的详细信息,属于为传感器管理的重要内容[3-6]。交叉提示发生在多传感器协同工作当中,能够发挥4个方面作用:①当传感器发生故障或超出其能力范围时,该传感器提示其他传感器进行目标交接,实现对目标的连续不间断探测;②多个传感器通过交叉提示实现信息共享以此获取关于目标的全面信息;③一个传感器通过被提示,能够获取该传感器探测不到的关于目标的额外信息;④传感器通过被提示,可以在目标进入其探测范围前进行小空域搜索,以此缩小目标搜索时间,增强传感器的探测能力[7]。
多传感器交叉提示直接发生在传感器与传感器之间,不受作战指挥控制中心控制,因此多传感器交叉提示算法是一种分布式算法[8]。分布式算法在近几年在传感器管理、传感器部署[9]等问题上应用较多。在以往的分布式算法中,大多采用基于市场机制的合同网[10]、拍卖算法[11]等算法,每个Agent首先在市场机制下确定协议,然后在相应情况中自行做出推理和选择。例如,文献[12]在寻找初始近优方案过程中,采用了扩展正向/逆向拍卖算法;文献[13]设计有限中央控制下的传感器管理结构,提出一种基于合同机制的多UCAV分布式协同任务控制模型;文献[14]改进并扩展了组合拍卖CABOB算法,提出一种基于组合拍卖的协同多目标攻击空战决策算法;文献[15]在考虑市场平衡的情况下,提出一种基于双边组合拍卖的传感器管理算法,达到比较好的效果;文献[16]采用合同网实现多架UCAV的分布式协同任务分配,提出基于协商的分布式任务分配方法。此外,在其他方法方面,文献[17-18]通过完美效用函数和强化学习的方法,将提高系统整体效能问题转化为提高单个传感器效能问题,提出基于群集智能的传感器管理方法,该算法优越性得到证实。
本文主要围绕多传感器交叉提示技术在任务交接中的应用问题进行讨论,每架UCAV视为一个具有侦察探测功能的传感器,研究在特定作战情形下,我方多UCAV在受到敌方武器系统威胁时对敌方多目标进行侦察的情况,探讨当某UCAV被敌方雷达锁定直至被武器系统摧毁的过程中,该UCAV如何通过交叉提示技术实现任务交接,顺利完成对多目标的侦察任务。
1 基于多Agent技术的传感器分布式管理结构
在传感器分布式管理结构当中,每个传感器视为一个具有自主计算、判断和决策功能的Agent[19]。Agent可以认为是一种可以感知外部世界状态信息并发送自身状态信息的,能够独立运行最终到达给定目标状态的计算实体或程序[20]。将多Agent代理技术应用到传感器管理当中,构建基于多Agent代理技术的传感器分布式管理结构如图1所示。

图1 多UCAV分布式管理结构示意图
如图1所示结构,基于多Agent技术的传感器分布式管理结构的作战体系由作战指挥控制中心中的管理Agent和装载于各传感器中的Agent构成。作战指挥控制中心中的管理Agent通过集中式算法进行整体资源调度和任务协调,向各传感器中的Agent分配任务,实时监控传感器对任务的执行情况,接收来自各传感器Agent发送的信息并发送控制命令,是建立在各个传感器Agent自主规划和自行协商之上更高层次的管理,用来处理重大突发状况下全局任务的调整和整体传感器资源的调度;各传感器Agent通过分布式算法进行自主调整和局部规划,具有自主决策能力,接收来管理Agent下达的命令,当外部环境出现变化时,能够自主规划以适应新的作战形势,或是通过交叉提示算法与其他传感器Agent自行协商来适应新的环境,确保管理Agent下达的任务能够顺利完成。
采用此种由作战指挥控制中心有限控制下的传感器分布式管理结构,是集中控制和自主调整的充分结合,其优点为:既能够发挥作战指挥控制中心的决策领导作用,又能缓解作战指挥控制中心的计算压力,能够充分发挥各传感器Agent对局部环境信息掌握详细和及时的优点,减少了传感器和作战指挥控制中心之间的通信时间,更能适应作战态势紧急的情况。但也存在一定不足:单个传感器一味追求自身效能的提高,可能引起“公共悲剧”问题[21]。
2 采用多传感器交叉提示技术的多UCAV作战场景描述
作战环境下,我方要派遣分布在α个无人机基地中的m架UCAV对敌方的n个地面目标进行侦察,每个目标被侦察1次,双方作战态势示意图如图2所示。

图2 敌我双方作战态势示意图
假定我方UCAV装载的侦察传感器为光学传感器,UCAV飞行到目标正上方时可瞬时对目标进行拍照完成侦察任务,侦察到的目标信息会马上传回我方作战指挥控制中心。在作战过程中,每个敌方目标处均部署雷达站,当UCAV进入到雷达探测范围时,雷达会对该UCAV进行探测,一旦锁定该UCAV,敌方武器系统将发射导弹摧毁该UCAV。当UCAV被锁定时,被锁定信息马上会被该UCAV获知,设UCAV从被锁定到被摧毁持续的时间为TΔ。若该被锁定的UCAV在被锁定时尚没有完成作战指挥控制中心下的侦察任务,则在时间TΔ内,该被锁定的UCAV将采用多传感器交叉提示技术将其未完成的侦察任务提示给其他未被敌方雷达锁定的UCAV或无人机基地中的UCAV,由其完成该被锁定的UCAV尚未完成的任务,直至多个UCAV在协同作用下,完成作战指挥控制中心下达的所有侦察任务。
将作战中的UCAV管理问题进行数学描述,具体如下:
假定α个UCAV基地集合为:
Base={b1,b2,…,bα}
(1)
假定共m架UCAV,每架UCAV装载1个光学传感器,并对应与一个传感器Agent,UCAV、传感器和Agent均用以下集合表示:
Sensor={s1,s2,…,sm}
(2)
假定敌方n个将要被侦察的目标集合为:
Target={t1,t2,…,tn}
(3)
假定每个目标的优先级集合为:
First={f1,f2,…,fn}
(4)
目标优先级的定义及计算方法见3.1节。
假定侦察任务开始时,我方管理Agent下达的侦察方案为:
Plan={plan1,plan2,…,plani,…,planm}
(5)
式中:plani为第i架UCAVsi应侦察的目标集合。
假定m个传感器Agent为m架UCAV规划确定的巡航路线集合为:
Line={l1,l2,…,li,…,lm}
(6)
式中:li为si对pi中的所有目标侦察完毕所飞行的路线。
目标函数:
①假定m架UCAV在空中巡航时间分别为:
Time={time1,time2,…,timem}
(7)
应使所有UCAV在空中飞行的巡航时间最短,则有目标函数:
(8)
若所有UCAV巡航速度相同且为定值V,由Time=Line/V可知,传感器Agent在规划巡航路线时,应使飞机的巡航路线最短,上述目标函数可转化为:
(9)
②UCAV在巡航过程中,应尽量对优先级较高的目标优先进行侦察,有目标函数:
(10)
式中:Δi为si的飞行路线li与si按照优先级从高到低的顺序遍历目标的巡航路线li优先级的相异度,相异度定义及计算方法见3.2节。
约束条件:
①假定每架UCAV在空中最大巡航时间均为T,实际飞行时间应小于最大巡航时间,有:
time1≤T,time2≤T,…,timem≤T
(11)
②假定在巡航过程中,被敌方摧毁的m*架UCAV集合为:
(12)
假定每架UCAV完成任务提示的时间为Time*。
假定每个被摧毁的UCAV从被锁定到被摧毁持续时间为TΔ。
UCAV应在被摧毁之前完成对其他UCAV的提示并实现任务交接,则有:
Time*≤TΔ
(13)
③UCAV应完成作战指挥控制中心最初下达的所有侦察任务,假定m架UCAV实际侦察方案集合为Plan*,则有:
Plan⊂Plan*
(14)
④假定UCAV起飞基地集合为:
Basestart={bstart1,bstart2,…,bstartm}
(15)
假定降落基地集合为:
Baseend={bend1,bend2,…,bendm}
(16)
每架执行任务的UCAV最终应回到起飞基地,则有:
bend1=bstart1,bstart2=bend2,…,bstartm=bendm
(17)
3 多传感器交叉提示模型
3.1 目标优先级模型
目标优先级表示目标对我方的威胁程度,优先级别越高的目标,对我方军事威胁越大,应考虑优先对其进行侦察并摧毁。影响目标t优先级别的因素主要有:目标距离威胁α1、目标角度威胁α2、目标军事价值威胁α3[14]。常用加权函数来确定目标的优先级别:
f=ϖ1α1+ϖ2α2+ϖ3α3
(18)
式中:f表示目标t的优先级;α1、α2、α3为影响目标优先级的因素,且0≤α1≤1、0≤α2≤1,0≤α3≤1;ϖ1、ϖ2、ϖ3为α1、α2、α3所占权重,其值由专家给出,且ϖ1+ϖ2+ϖ3=1,由以上可知,f∈[0,1]。
3.2 巡航路线相异度模型
假定作战指挥控制中心为某UCAV分配的侦察任务集合中包含k个目标,即plan={t1,t2,…,tk}。UCAV装载的传感器Agent对该UCAV的巡航路线进行规划,能够遍历k个目标的巡航路线集合为:

(19)
式中:K为可行航线总条数。

(20)


(21)

(22)

3.3UCAV巡航路线规划算法
UCAV中的Agent需针对作战指挥控制中心中的Agent分配的侦察任务集合plan={t1,t2,…,tN}进行巡航路线规划,寻找能够遍历plan中所有目标的最优巡航路线,并使该UCAV最终回到出发的基地,当N≥5时,采用基于改进人工蜂群算法的最优巡航路线计算[22]方法,当N<5时,由于可选巡航路线较少,采用穷举法即可。
①生成可行巡航路线
生成全部N种可行巡航路线,写成矩阵形式,有可行解集合为:
(23)
②构造适应度函数

(24)

③确定最优巡航路线
该Agent确定的该UCAV最优巡航路线为:
l=(min{z1,z2,…,zi,…,zN})-1
(25)
在基本人工蜂群算法中,跟随蜂采用轮盘赌的方式按照式(26)求得的蜜源概率值选择蜜源,蜜源为可行巡航路线。
(26)
式中:zk为蜜源适应度,qk为按照正向轮盘赌方式该蜜源被选择的概率。
由式(26)可知,概率值越大的蜜源得到的跟随蜂数目越多,但随着计算次数增加,种群多样性下降,算法的全局搜索能力降低。
针对上述问题,对基本人工蜂群算法进行改进。跟随蜂采用双向轮盘赌的策略选择蜜源,除N个跟随蜂按照正向轮盘赌方式选择蜜源外,另外有N个跟随蜂根据式(2)采用反向轮盘赌的方式选择蜜源。
(27)
式中:zk为蜜源适应度,ok为按照反向轮盘赌方式该蜜源被选择的概率。
采用改进人工蜂群算法,求解最优巡航路线,其算法流程图如图3所示。

图3 敌我双方作战态势示意图
3.4 基于拍卖理论的多传感器交叉提示算法
当巡航中的UCAV被敌方雷达锁定后,若该UCAV尚未完成对plan*中目标的侦察,则与该UCAV对应的传感器Agent需通过交叉提示算法提示其他尚未被锁定的巡航中的UCAV或是我方基地中尚未起飞的UCAV,由被提示的UCAV侦察plan*中尚未被侦察到的目标。
本文在被锁定的UCAV选择提示对象进行任务交接时,采用基于拍卖算法的多传感器交叉提示算法。
拍卖算法本质上为搜索树算法,是一种具有较快速度和较高操作性的多智能体协调协商机制。基本拍卖算法包含两种Agent:拍卖Agent和竞拍Agent。拍卖Agent宣布拍卖任务开始,并广播拍卖信息,负责对任务进行拍卖;竞拍Agent根据自身情况对拍卖的任务出价竞拍。当所有竞拍Agent出价完毕后,拍卖Agent选择出价最高的竞拍Agent,宣布其中标。
在多传感器交叉提示过程中,拍卖算法的任务交接模型可描述如下[23]:
Auction=
(28)
式中:T*需被拍卖的目标集合,A*为发起拍卖的拍卖Agent集合,B*为参加拍卖的竞拍Agent集合,C*为竞拍Agent投标价格集合。
假定在巡航过程中时刻β时,被敌方雷达锁定的UCAV集合为Sensora,Sensora⊂A*,假定Sensora尚未进行巡航的目标集合为:
(29)

假定竞拍Agent集合为Sensorb,Sensorb=Sensor-Sensora且Sensorb⊂B*。
Sensora作为拍卖Agent需在时间timeΔ内对尚未完成的plan*中的所有目标进行拍卖。在拍卖过程中,Sensora视为一个整体,按照优先级从高到低的顺序依次对集合plan*中的目标进行拍卖。
竞拍Agent集合Sensorb的竞拍价格计算方法见3.5节。
基于拍卖算法的多传感器交叉提示流程为:
步骤1 确定同一时刻被锁定需要提示其他传感器接替来完成巡航任务的拍卖Agent集合Sensora,并确定需要拍卖的任务集合plan*;
步骤2 确定竞拍Agent集合Sensorb={Sensor-Sensora}且Sensorb⊂B*;
步骤3 拍卖Agent把需要拍卖的任务广播给投标方,同时宣布拍卖开始,按照plan*集合中优先级从高到低的顺序依次对集合中的目标进行拍卖;
步骤4 每个竞拍Agent计算各自竞拍价格,若在巡航能力范围内能够完成包括对该目标和自身尚未巡航的目标的巡航任务,则向拍卖Agent投标,发送竞拍价格,否则,放弃竞拍;
步骤5 拍卖Agent接收每个竞拍Agent发送的竞拍价格,出价最小的Agent作为被提示对象,宣布其在本轮拍卖中胜出,该Agent对应的UCAV接受对拍卖目标的侦察任务,优化并更新巡航路线,按照新的巡航路线开始巡航。
步骤6 若plan*所有任务均拍卖完毕,则结束此次拍卖,否则,回到步骤4。
3.5 竞拍价格计算方法

cb=timeb2-(timeb-timeb1)
(30)
3.6 算法复杂度分析
在最优巡航路线规划中,若采用改进人工蜂群算法,算法复杂度为O1。
定理1 设用M表示粒子的空间维度,S表示种群规模,α表示最大迭代次数,处理时间规模为β,则算法的计算复杂度为O1(M×S×α×β)[24]。
在竞拍价格计算中,算法复杂度为O2。
设竞拍传感器个数为K,则拍卖算法执行1次,其复杂度为O=O1+O2+1。
4 仿真实验与结果分析
假设作战环境下我方有3个UCAV基地,每个基地均配备2架UCAV,巡航飞行速度为200 km/h,最长巡航时间为7 h,雷达从锁定UCAV到武器系统发射导弹摧毁UCAV经历的时间为0.1 h,我方3个基地的6架UCAV要对敌方10个目标进行侦察,UCAV基地和目标位置分布如图4所示。
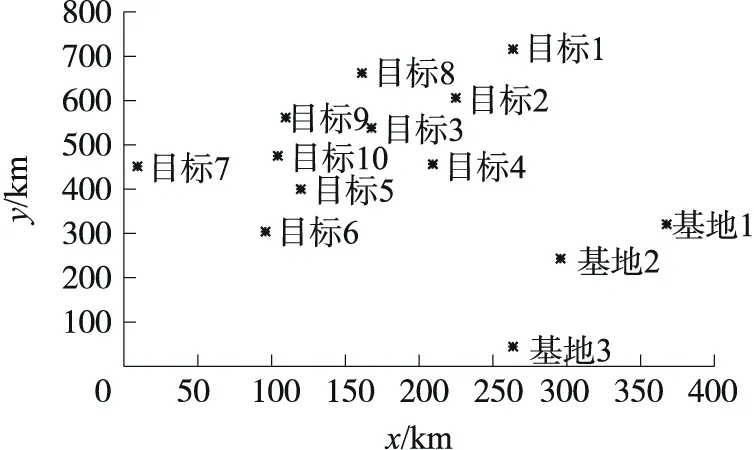
图4 敌我双方作战态势示意图
UCAV基地相关信息和侦察目标分配情况如表1所示。

表1 基地信息表
各目标相关信息如表2所示。

表2 目标信息表
4.1 UCAV路线规划
若对于s1,不考虑其最长巡航时间限制,侦察目标为t1、t2、t3、t4、t5、t6。采用粒子群算法、基本人工蜂群算法、改进人工蜂群算法3种算法计算得到最优巡航路线,其迭代曲线如图5所示。
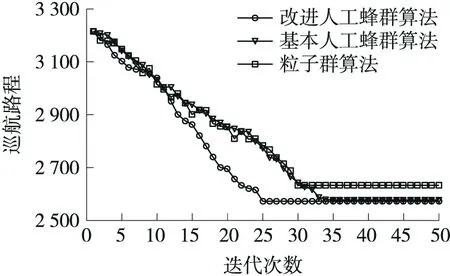
图5 算法迭代曲线
由图5可知,用改进人工蜂群算法计算最优巡航路线,其收敛速度最高,寻优能力最强,其计算的巡航路线为3-1-2-4-6-5,其巡航路程为1 863.24 km,飞行时间为9.31 h。
4.2 任务交接情形仿真
接受侦察任务的UCAV规划计算的各UCAV的巡航路线信息如表3所示。
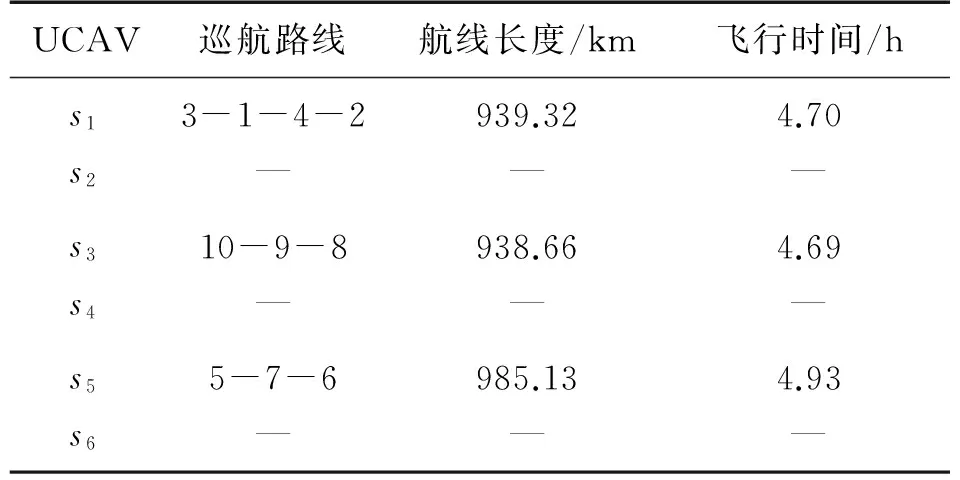
表3 飞行航线信息表
各传感器Agent规划得到的巡航路线如图6所示。
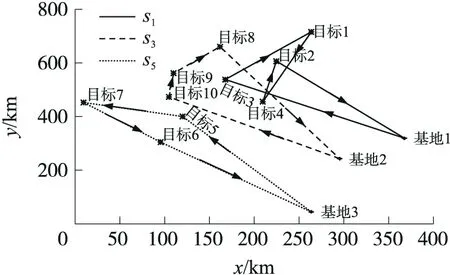
图6 飞行航线示意图
t=0时,s1坐标为(368,319),s3坐标为(264,44),s5坐标为(296,242),假定三架UCAV在t=0时同时起飞,3架UCAV坐标位置随时间变化曲线如图7所示。

图7 UCAV坐标位置变化曲线图
4.2.1 完成单个任务交接的情形
当t=2.4 h时,s3坐标为(152.8,642.4),被敌方雷达锁定,尚未完成对目标{t8}的侦察,此时,s1坐标为(255.7,699.7),尚未完成对{t1,t2,t4}的侦察任务,s5坐标为(32.91,440.4),尚未完成对{t6,t7}的侦察。
经基于拍卖理论的多传感器交叉提示算法计算,调整后的UCAV巡航路线信息如表4所示。

表4 飞行航线信息表
调整后的s1、s3、s5巡航路线如图8所示。

图8 飞行航线示意图
调整后的s1、s3、s5坐标变化曲线如图9所示。
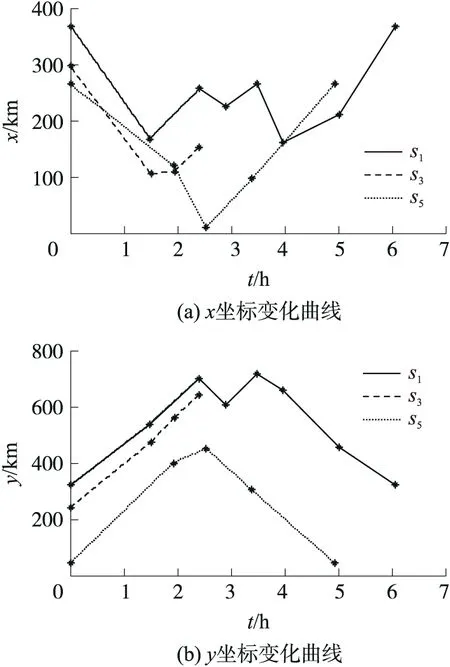
图9 UCAV坐标位置变化曲线图
此次多传感器交叉提示过程,拍卖算法运行0.058 h,小于0.1 h,故s3能在被摧毁前完成对其他传感器的提示,顺利完成任务交接。
4.2.2 完成多个任务交接的情形
当t=3.4 h时,s1坐标为(262.2,700.1),已完成对目标t2的侦察,被敌方导弹击毁,尚未完成对{t1,t4,t8}的侦察任务,此时,s5坐标为(98.17,300.6),完成所有分配的任务。
经基于拍卖理论的多传感器交叉提示算法计算,调整后的UCAV巡航路线信息如表5所示。

表5 飞行航线信息表

图10 飞行航线示意图
调整后的s1、s2、s3、s5巡航路线如图10所示。
调整后的s1、s2、s3、s5坐标变化曲线如图11所示。
此次多传感器交叉提示过程,拍卖算法运行0.072 h,小于0.1 h,故s3能在被摧毁前完成对其他传感器的提示,顺利完成任务交接。
8架UCAV对10个目标的侦察过程共持续8.11 h。在侦察过程中,共有s1、s2、s3、s5共4架UCAV参与到任务当中,其中,s3和s1在执行任务时,被敌方雷达锁定并被武器系统摧毁,导致对目标的侦察任务出现中断,但通过多传感器交叉提示技术,顺利实现任务交接,确保对10个目标的侦察任务能够顺利完成。
在整个侦察探测过程中,传感器—目标对应关系变化如图12所示。
从图11可知,传感器—目标配对并不是一成不变的,而是随着作战态势的变化而进行及时调整,当某UCAV被击落后,传感器之间通过互相提示,对未侦察到的目标进行重新分配,得到新任务的传感器重新进行巡航路线规划。在0~6.2 h时间段内,完成了对传感器的一个动态控制过程,顺利完成了对所有目标的侦察探测任务。
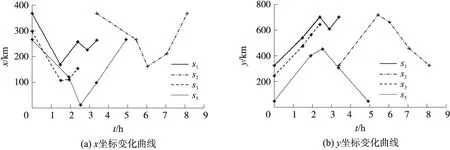
图11 UCAV坐标位置变化曲线图

图12 传感器-目标配对随时间变化情况
5 结论
当多个UCAV协同执行对多目标的侦察任务时,若某一传感器突然不能正常工作,将严重影响作战任务的完成进度和质量,针对此问题,本文建立了基于多Agent的分布式多传感器管理结构,提出了基于拍卖理论的多传感器交叉提示算法,以此实现任务交接,从而确保整体作战任务顺利完成。仿真实验证明了本文所提出模型具有可行性,算法具有有效性。特别说明的是,本文在以往论文对多传感器多目标静态分配算法的基础上,重点研究的是决策方案的动态执行过程,研究的是一个作战时间段,而不再是一个时间点,更适合复杂多变的战场环境。
[1] Barbato G. Uninhabited Combat Air Vehicle Controls and Displays for Suppression of Enemy Air Defenses[J]. CSERIAC Gateway,2000,11(1):1-4.
[2] 高晓光,杨有龙. 基于不同威胁体的无人作战飞机初始路径规划[J]. 航空学报,2003,24(9):435-438.
[3] Ng G W,Ng K H,Wong L T. Sensor Management-Control and Cue[C]//The 3rd International Conference on Information Fusion,Singapore,July 10-13,2000.
[4] 何友,关欣,王国宏. 多传感器信息融合研究进展与展望[J]. 宇航学报,2005,26(4):524-529.
[5] 樊浩,龙治国,黄树彩,等. 多传感器交叉提示技术发展现状与研究[J]. 飞航导弹,2012(2):79-84.
[6] 樊浩,黄树彩,韦道知,等. 多传感器交叉提示技术若干问题[J]. 电光与控制,2012,19(11):47-53.
[7] 樊浩. 多传感器交叉提示技术及其在目标探测中的应用研究[D]. 空军工程大学,2011:20-21.
[8] 段沛博,张长胜,等. 分布式约束优化方法研究进展[J]. 软件学报,2016,27(2):264-279.
[9] 秦宁宁,余颖华,吴德恩. 移动异构传感器网络分布式部署算法[J]. 传感技术学报,2016,29(1):95-102.
[10] Smith R G. The Contract Net Protocol:High Level Communication and Control in Distributed Problem Solver[J]. IEEE Transactions on Computers,1980,29(12):1104-1113.
[11] Shohamy Y,Leyton Brown K. Multi-Agent Systems:Algorithmic,Game Theoretic and Logical Foundations[M]. Cambridge:Cambridge University Press,2009.
[12] Ahmed A,Patel A,Brown T,et al. Task Assignment for a Physical Agent Team Via a Dynamic Forward/Reverse Auction Mechanism[C]∥2005 International Conference on Integration of Knowledge Intensive Multi-agent Systems. 2005:311-317.
[13] 龙涛,陈岩,沈林成. 基于合同机制的多UCAV分布式协同任务控制[J]. 航空学报,2007,28(2):352-357.
[14] 刘波,张选平,王瑞,等. 基于组合拍卖的协同多目标攻击空战决策算法[J]. 航空学报,2010,31(7):1433-1444.
[15] 吴巍,王国宏,李朝霞,等. 基于双边组合拍卖的传感器管理算法[J]. 系统工程与电子技术,2014,36(10):1960-1965.
[16] 龙涛,朱华勇,沈林成. 多UCAV协同中基于协商的分布式任务分配研究[J]. 宇航学报,2006,27(3):457-462.
[17] 刘波,覃征,邵利平,等. 基于群集智能的协同多目标攻击空战决策[J]. 航空学报,2009,30(9):1727-1739.
[18] 杨博,王向华,邵利平,等. 基于群集智能的传感器管理方法研究[J]. 兵工学报,2012,33(2):155-162.
[19] Ahmed A,Patel A,Brown T,et al. Task Assignment for a Physical Agent Team Via a Dynamic Forward/Reverse Auction Mechanism[C]∥2005 International Conference on Integration of Knowledge Intensive Multi-Agent Systems. 2005:311-317.
[20] 刘荣. 多Agent协作机制的研究与应用[D]. 南京:南京航空航天大学,2012:7-10.
[21] Hardin G. The Tragedy of the Common[J]. Journal of Natural Resources Policy Research,2009,1(3):243-253.
[22] 班祥东. 蜂群算法理论研究综述[J]. 软件导刊,2012,11(10):36-38.
[23] 费爱国,张陆游,丁前军. 基于拍卖算法的多机协同火力分配[J]. 系统工程与电子技术,2012,34(9):1829-1833.
[24] 陈国龙,郭文忠,陈羽中. 无线传感器网络任务分配动态联盟模型与算法研究[J]. 通信学报,2009,30(11):48-54.
The Study on the Imply of Multi-Sensor Cross-Cueing Technology on the Reconnaissance Task of Multi-UCAV
PANG Ce,HUANG Shucai*,LIU Jinchang,WEI Daozhi,XIA Xunhui
(Air and Missile Defense College,Air Force Engineering University,Xi’an 710051,China)
When UCAVs are on the synergy reconnaissance task,once one of them is destroyed,the subtask which it undertakes will not be completed. In order to solve this problem,multi-sensor cross-cueing technology is implied on the system of multi-UCAV to handoff targets. Firstly,the technology of multi-agent is introduced,and the distributed management structure of sensors is built basing on the technology of multi-agent. Secondly,the combat scene where multi-sensor cross-cueing technology is implied is described using mathematical language,and the mathematical model is built. What’s more,with making the diversity of courses less and the length shortest taken into consideration,the optimizing method of UCAV’ courses basing on improved bee colony algorithm is raised. Finally,the emphasis is placed on the dynamic control of sensors,in order to handoff targets,the multi-sensor cross-cueing method basing on auction theory is raised. The simulation result indicates that models in this paper are rational and the methods are effective.
multi-sensor cross-cueing;multi-agent;distributed algorithm;auction theory;bee colony algorithm

庞 策(1993-),男,河北衡水人,硕士研究生,主要研究方向为多传感器交叉提示技术,hsc67118@126.com;

黄树彩(1967-),男,湖北黄梅人.教授博士生导师。2005年在空军工程大学防空反导学院获工学博士学位,现为空军工程大学防空反导学院教授,主要研究方向为空天协同目标探测与跟踪,18392447996@163.com。
项目来源:国家自然科学基金项目(61573374)
2016-10-12 修改日期:2017-02-04
TN215
A
1004-1699(2017)06-0968-09
C:7230
10.3969/j.issn.1004-1699.2017.06.027
猜你喜欢
数学小灵通·3-4年级(2020年11期)2020-12-14 07:05:40
数学小灵通·3-4年级(2020年3期)2020-06-24 05:50:50
初中生世界·八年级(2019年6期)2019-08-13 18:41:18
能源(2017年10期)2017-12-20 05:54:07
小学生导刊(2017年31期)2017-08-15 00:53:14
能源(2017年5期)2017-07-06 09:25:54
小学生导刊(低年级)(2016年8期)2016-09-24 23:55:21
小学生导刊(低年级)(2016年6期)2016-07-02 22:17:33
雷达与对抗(2015年3期)2015-12-09 02:38:50
计算机工程(2015年8期)2015-07-03 12:19:54