
基于线扫描的管路三维重建技术研究与实现
2017-06-22 14:25范生宏鲁利刚
无线电工程 2017年7期
张 杰,李 潘,范生宏,王 顺,鲁利刚
(1.北京卫星制造厂,北京 100094;2.北京普达迪泰科技有限公司,北京 100083)
基于线扫描的管路三维重建技术研究与实现
张 杰1,李 潘2,范生宏2,王 顺2,鲁利刚1
(1.北京卫星制造厂,北京 100094;2.北京普达迪泰科技有限公司,北京 100083)
针对航空发动机管路装配过程中,装配质量难以保证、检测效率低的问题,提出一种基于线结构光的管路三维重建测量方法。该方法通过线结构光扫描技术,获取管路表面三维轮廓数据,利用三维点云数据提取管路脊线和半径值。针对离散的脊线坐标值,采取NURBS算法对其拟合,利用管路脊线和半径值重建管路三维模型。通过线结构光扫描测量系统,获取管路轮廓点云数据,重构管路三维模型。实验结果证明,该方法和测量系统可以实现管路三维的快速重建,重建数据可用于管路间隙测量。
线结构光;亚像素;三维测量;管路重建
0 引言
航空发动机的管路系统[1]主要是指连接发动机各个部件、附件以及与飞机相连的管路,包括导管及连接件、密封件和卡箍等,用于液压、燃油和氧气等介质的输送。一台典型航空发动机上的导管多达100~250根,其形状、尺寸各异,由于布局空间限制严格,导管层叠交错,空间形态复杂。在航空发动机的装配过程中,管路的敷设、导管的固定、卡箍的安装都需要遵循相应的规则,其装配质量直接关系到成品的质量、可靠性和工作寿命。若出现漏检情况,会导致试车过程中出现导管碰撞损毁或介质泄露的情况。因此,为了提高装配质量和可靠性,提出一种管路数字化检测方法,实现对管路系统的外形轮廓及位置度的准确测量,减少装配误差,提高装配质量。
针对航空发动机管路系统检测方法[2]可分为接触式检测和非接触式检测。非接触式检测[3]目前比较成熟的是光学测量方法,在满足检测精度要求下,检测效率和自动化程度都有所提高。基于线激光的测量方法,采用结构光测量技术[4],拥有大量程、大视场、高精度以及控制简单的优势,可扩展应用于管路系统的三维测量。针对管状点云数据的三维重建处理,文献[5-7]已展开多项研究,西北工业大学的刘元朋博士[8]通过提取管路的截面特征和曲面特征,利用专家系统对其进行识别和规范化处理,最后利用提取的管路参数信息进行实体模型重建。上海大学的孙亮等人[9]提出一种基于迭代的切片方法优化算法,根据管线方向变化自动寻找对应切片,获取管道截面轮廓线及中心线,进而重构出模型。Ulrich Bauer[10]针对单视图采集的管路点云,利用移动最小二乘法计算脊线,然后根据一种启发式的空间圆弧曲线逼近拟合算法,重构管道曲面。本文基于上述思想,提出了通过构建线结构光测量系统来实现三维信息获取,利用传动装置实现被测管路与光切面的相对平移运动,获取管路表面单视图三维轮廓数据,根据管路自身特性,采取拟合方法提取管路中心线和半径值,最终实现管路三维重建。
1 线扫描管路三维重建系统
1.1 系统框架
线扫描管路三维重建系统框架如图1所示。
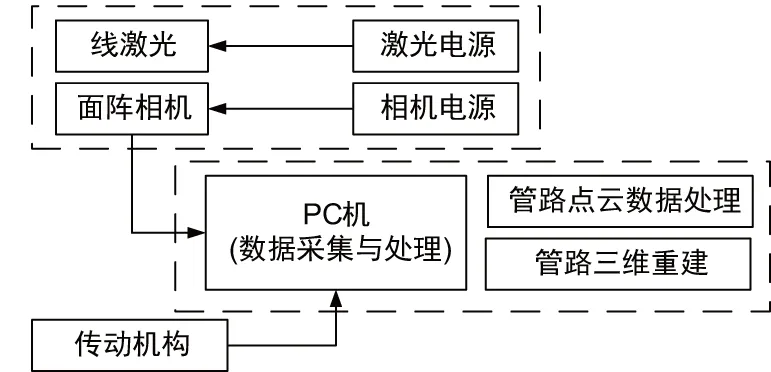
图1 线扫描管路三维重建系统框架
基于线扫描的管路三维重建系统由3部分组成:线结构光三维测量模块、传动机构模块和管路三维重建软件。三维测量模块是通过已标定相对位置关系的相机和线激光,获取管路三维切片数据;传动机构模块,通过驱动激光切片和管路相对平移运动,获取管路单视角三维轮廓数据[11];管路三维重建软件,通过对管路点云数据处理,提取管路脊线和半径特征,实现管路模型的三维重构。
1.2 测量流程
线扫描管路三维测量示意图如图2所示的,激光光源发出的线结构光投射到物体表面上,并在相机像面上成像。根据相机成像面上激光线的形变状态,利用标定出的相机内参数和相对位置关系参数,得到物体表面一帧的点云数据。通过单轴运动机构驱动传感器对物体表面进行扫描,从而获得被测物体表面的点云数据。
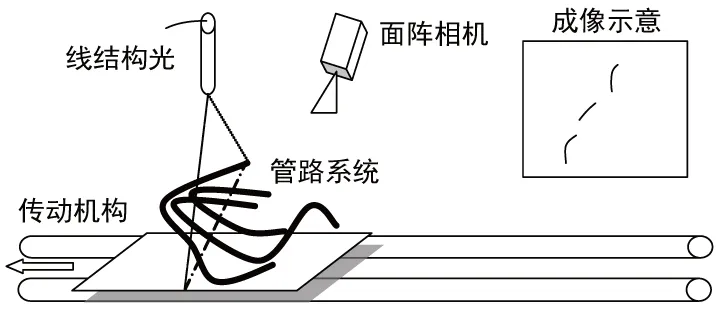
图2 线扫描管路三维测量示意
2 线结构光三维扫描技术
2.1 线结构光测量模型
结构光测量模型如图3所示,利用激光发射线光束,光平面与物体相交就会在物体表面形成一条轮廓光带,利用相机采集轮廓光带图像[12]。此时,相机、光带和光束发生器形成一个三角对应关系,通过计算模型即可得到被测物体光带轮廓的三维坐标。
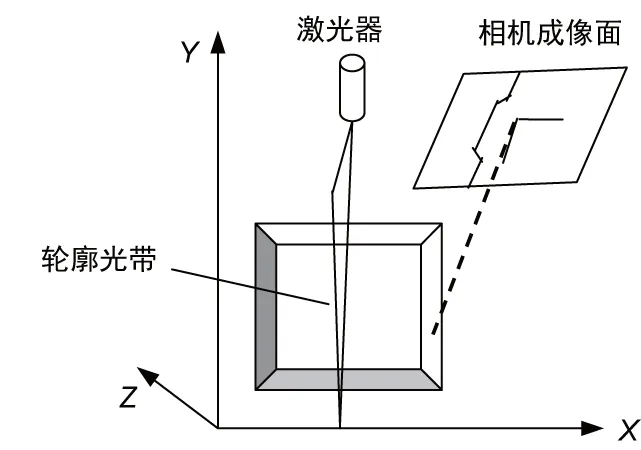
图3 结构光测量模型
2.2 结构光数学模型与镜头畸变校正
结构光映射模型如图4所示,其描述是结构光光平面与摄像机平面之间的映射关系。通过增加线结构光平面的约束方程,则可以获取摄像机二维图像点坐标唯一对应的三维实物点坐标[13]。
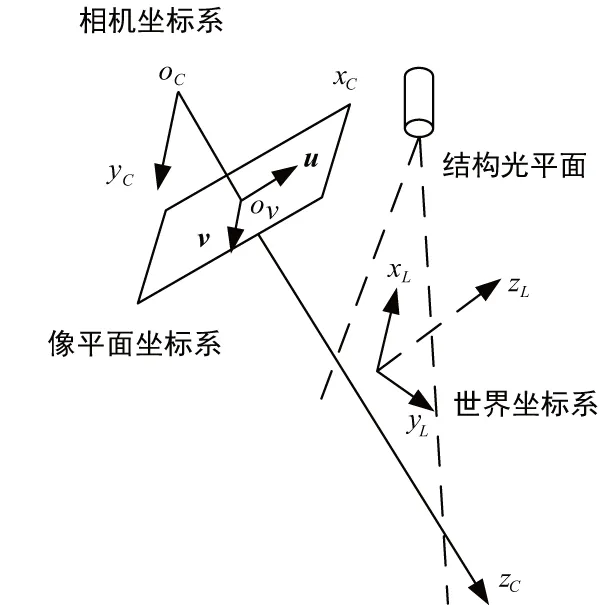
图4 结构光映射模型
映射关系和约束方程为:
式中,f、r、T等参数组成由相机内参、外参共同决定的投影矩阵;a,b,c,d组成线结构光平面方程。由于理想的成像模型是不存在的,在实际应用中还需要考虑镜头畸变问题,其畸变模型可用下列公式所描述。
系统畸变:

径向畸变:

偏心畸变:
像平面畸变:

内方位元素畸变:
2.3 条纹亚像素中心线坐标提取
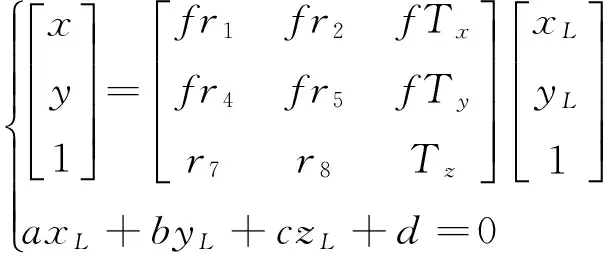
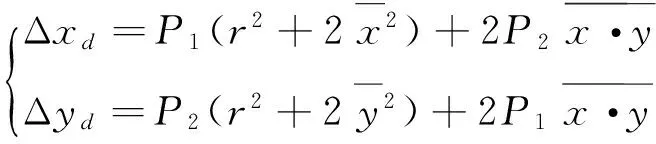
相机获取的结构光条纹图像是具有一定宽度,存在噪声干扰的光带。针对光带条纹中心提取方法有多种[14],如中心法、极值法、重心法和拟合法等。本文通过分析结构光带图像特点:噪声干扰、灰度不对称非正态分布和散斑效应等。采取先利用低通平滑滤波算法进行预处理,降低噪声和散斑影响,设If(i,j)为低通滤波后的图像数据,滤波系数分别为k0=0.370 286,k1=0.271 843,k2=0.095 016。
If(i,j)=k0×I(i,j)+k1×[I(i,j-1)+I(i,j+1)]+
k2×[I(i,j-2)+If(i,j+2)]。
再利用梯度中心法提取条纹中心亚像素坐标。提取结果如图5和图6所示。

图5 结构光条纹灰度图分布
图6 条纹亚像素中心线提取
2.4 管路三维点云数据获取
搭建完线扫描模块和标定出传动机构运动方向后[15],即可用于物体表面轮廓三维数据获取。物体沿扫描运动方向的点云坐标由运动参数与扫描间隔决定,扫描运动的间隔大小,直接影响点云坐标值。本文所设计的结构光扫描系统的图像采集装置由运动控制系统的触发控制。系统运行时,通过IO控制卡输出触发信号,驱动传统机构前进,同时触发相机采集图像,获取稳定可靠的管路三维点云数据,如图7所示。
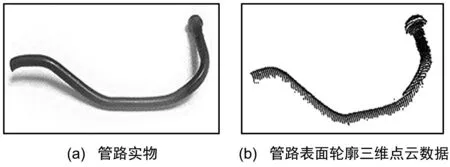
图7 管路表面轮廓点云数据获取
3 管路点云数据处理重构
针对管路表面轮廓点云数据,根据管路自身几何特性等先验知识[16],采用数据分割方法将点云分割成多个基元模块,利用拟合方法提取管路中心轴线坐标和半径值,对离散中心轴坐标点拟合曲线,利用脊线和半径值实现管路三维重建[17]。
3.1 点云数据分割
在管路点云数据处理过程中,管路半径值是一个关键参数。本文采取先提取管路半径值,再利用半径值对数据进行分块的方法[18]。管路半径值计算步骤如下:
① 首先对管路点云数据进行聚类分块,对分块点云数据投影到XY平面;
② 在XY平面通过拟合方法提取数据方向特征;
③ 对符合直线特征的点云块,按空间圆柱面拟合方法计算半径值。最后利用提取的管路半径值参数,采取最小包围盒法对管路进行分块。
空间圆柱面数学表达式为:
r2= (x-a)2+(y-b)2+(z-c)2-
式中,(a,b,c)为圆柱面中心轴一点;(d,e,f)为圆柱面中心轴方向向量;(x,y,z)为拟合圆柱面点云上一点,拟合圆柱面半径为r。利用点云拟合求解圆柱面参数步骤:先利用泰勒展开式将表达式线性化,整体平差,然后利用点云块每个数据点到圆柱面距离平方和最小的条件,利用最小二乘方法,求取圆柱面参数,局部圆柱面拟合如图8所示。
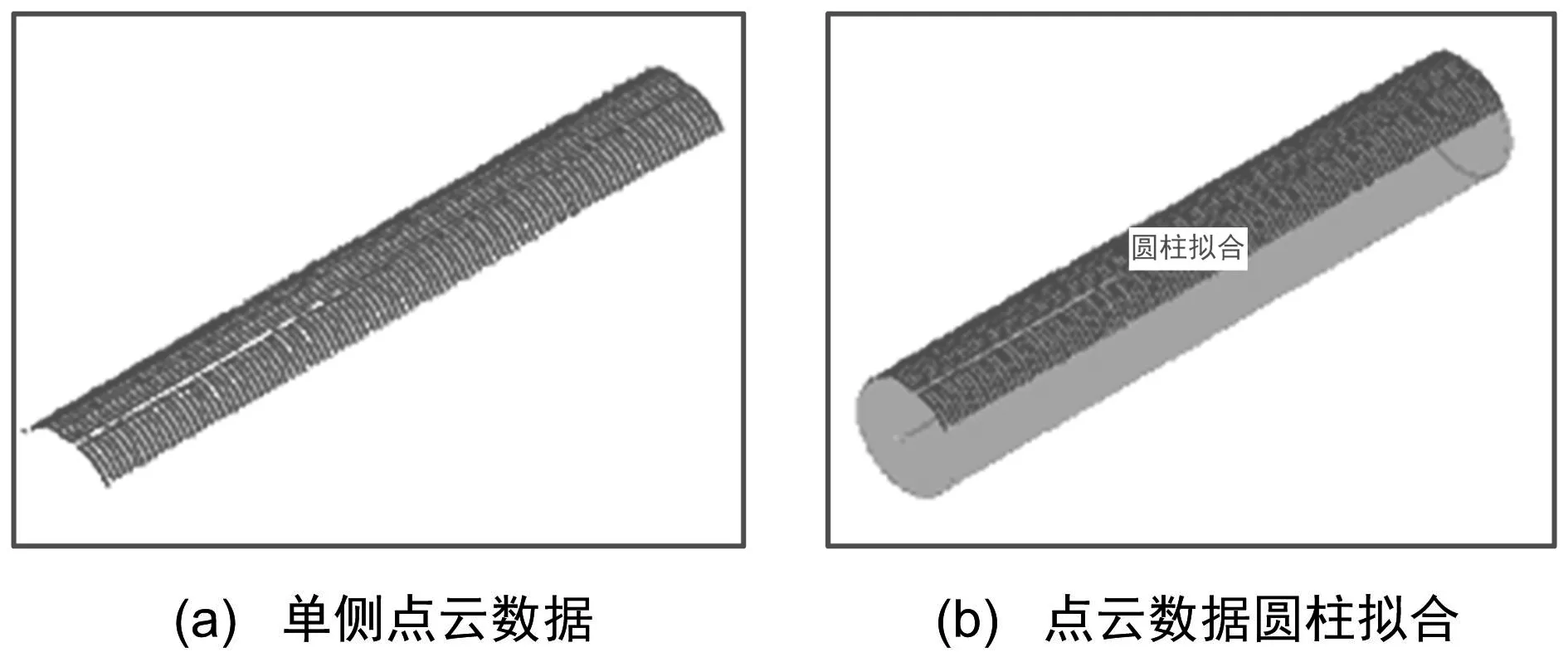
图8 局部圆柱面拟合
3.2 管路中心轴线提取
对每个点云数据块,利用其微分性质,拟合一个密切抛物曲面,将点云数据投影到曲面的中心轴线上,得到中心轴线上若干散乱点。具体步骤[19]如下:
① 以包围盒中心点作为参考点;
② 根据长方体点云密度计算适当邻域值;
③ 根据邻域点集拟合密切抛物曲面;
④ 将参考点投影到目标曲面上得到标记点,计算标记点在曲面上的微分性质;
⑤ 最后将标记点沿法向量方向移动到中心轴上,位移距离为最大主曲率的倒数。最终得到管路中心轴线上目标点。

当点集Pi中所有点到密切抛物曲面的距离和最短,则为所求密切抛物曲面,求和公式如下:

式中,OX为标记点;‖Pi-Ox‖为领域点集中点Pi到标记点距离;θ为加权函数;ui,vi,hi表示点集P在以{OX:u(n),v(n),n}坐标系下的参数化点。对求和公式进行优化求解,即可得到抛物曲面参数表示。管路中心轴线提取如图9所示。

图9 管路中心轴线提取
3.3 脊线拟合与管路重构
提取的中心轴坐标点列是存在噪声的散乱点列,在对其进行曲线拟合之前,需要进行平滑滤波处理。本文针对散乱点列中存在的突起异常值,通过计算相邻点之间角度和梯度,对超出设定阈值的点剔除处理,然后采取拟合方法提取管路脊线。
NURBS曲线拟合方法通过权因子和非均匀节点矢量能够对曲线的形状进行有效控制,不仅可以拟合标准二次曲线,也适用于自由曲线[20]。本文利用NURBS对平滑滤波后的中心轴点列进行拟合获得管路脊线。利用获取的管路半径值和管路脊线,导入三维重建软件,最终得到管路三维重建模型,如图10所示。
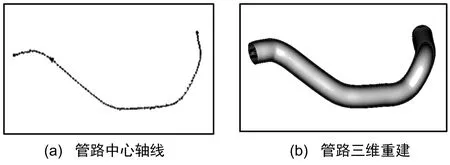
图10 管路中心轴拟合与三维重建
4 管路三维重建实验验证
本文利用上述方法,对模拟的管路系统进行三维重构实验验证,验证步骤如下:
① 利用线结构光扫描系统和传动机构,获取单视角下的管路表面三维点云数据。点云数据如图11(a)所示。
② 通过对点云数据进行分块,利用局部抛物面拟合方法,提取管路半径值和中心轴坐标点列,对离散点列进行曲线拟合,获取管路脊线数据。管路脊线如图11(b)所示。
③ 利用管路半径值和管路脊线,实现管路三维重建。重建结果如图11(c)所示。
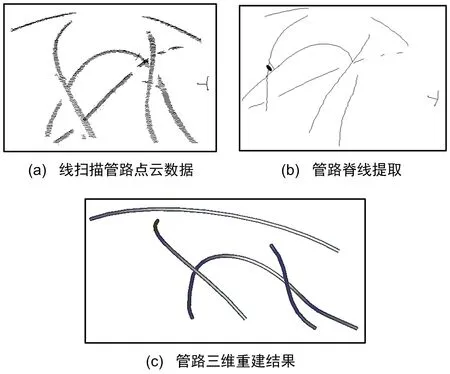
图11 三维重构实验结果
利用重建的管路三维模型,通过计算所得管路半径值、管路最小间隙值与实际值进行比较,误差小于0.1 mm。结果表面,利用线结构光测量系统重建的管路数据与实物有很好一致性,该方法满足现场管路重建和间隙测量需求。
5 结束语
本文将线扫描三维测量技术运用到管路系统的装配质量检测,通过三维线扫描测量系统和水平传动机构获取管路表面三维轮廓数据。针对管路点云数据,利用数据分割和局部抛物面拟合方法提取管路中心轴坐标点列和管路半径值,然后通过点列平滑和NURBS曲线拟合算法提取管路脊线,最终实现了管路三维重建。实验结果证明了该方法满足现场管路系统装配质量检测要求。
[1] 樊江.航空发动机外部管路多代理协同设计系统研究[D].北京:北京航空航天大学,2003.
[2] 刘检华,刘少丽,宁汝新,等.管路数字化布局设计与制造及检测集成技术[J].计算机集成制造系统,2015,21(4):941-954.
[3] 马骊群,曹铁泽,王继虎,等.便携式坐标测量系统在航空发动机关键部件检测中的应用[J].计测技术,2008,28(6):9-12.
[4] 宋大虎,李忠科,程春霞.基于线结构光的三维坐标测量技术研究[J].计算机工程,2012,38(22):291-292.
[5] 赵玉芹.基于多幅标定图像的管件三维重建[D].南京航空航天大学,2008.
[6] 张天,唐承统,刘检华.基于多目视觉的弯管空间参数测量方法[J].仪器仪表学报,2013,34(2):260-267.
[7] 牛平月,郑联语,杨启龙.基于双目视觉的管路快速检测技术研究与实现[J].航空精密制造技术,2014(2):16-19.
[8] 刘元朋,陈良骥,冯宪章,等.基于特征的航空发动机管路反求建模方法研究[J].机床与液压,2008(5):22-25.
[9] 孙亮,赵翠莲,施晓磊,等.基于切片法的管道重构算法及其应用[J].机械设计与研究,2010,26(4):15-18.
[10] BAUER U,POLTHIER K.Generating Parametric Models of Tubes from Laser Scans[J].Computer-Aided Design,2009,41(10):719-729.
[11] 张剑清,郑莉.基于结构光的不规则工业钣金件三维曲面重建[J].地理空间信息,2004,2(6):9-10.
[12] 范生宏,刘昌儒,亓晓彤,等.结构光三维测量系统精度分析及验证[J].光电工程,2014(5):52-56.
[13] 张维光,赵宏,张琦,等.线结构光三维轮廓测量系统的标定方法[J].中国激光,2009,36(1):182-188.
[14] 吴家勇,王平江,陈吉红,等.基于梯度重心法的线结构光中心亚像素提取方法[J].中国图象图形学报,2009,14(7):1354-1360.
[15] 陈新禹,马孜,陈天飞,等.线结构光视觉测量系统运动轴线的简易标定方法[J].中国激光,2012,39(11):168-173.[16] 刘元朋.基于特征的航空发动机管路反求建模系统关键技术研究[D].西安:西北工业大学,2006.
[17] 马符讯,那地曼-艾尼瓦尔,林欢.散乱点云数据的分割方法探究[J].测绘与空间地理信息,2014(10):148-151.
[18] 刘元朋,陈良骥,李明,等.航空发动机管路测量数据分割方法[J].航空学报,2008,29(2):285-291.
[19] 刘焕彬.点云管道曲面重构[D].杭州:杭州电子科技大学,2011.
[20] 韩明,孔亚洲,董炀斌,等.圆弧曲线的二次NURBS表示方法研究[J].华中科技大学学报(自然科学版),2001,29(12):37-39.
Research and Application of 3D Reconstruction Techniques of Pipeline Based on Line Scanning
ZHANG Jie1,LI Pan2,FAN Sheng-hong2,WANG Shun2,LU Li-gang1
(1.BeijingSpacecrafts,Beijing100194,China;2.BeijingProdetecTechnologyCo.,Ltd,Beijing100083,China)
This paper proposes a method of Pipeline 3D reconstruction based on line structured light in view of low detection efficiency and the assembly quality not guaranteed in the process of pipeline assembly.The method can be used to obtain the 3D profile data of the pipeline surfaces based on line structured light scanning technique,and extract the ridge line and the radius of the pipeline by using the 3D point cloud data.According to the discrete ridge coordinates,the NURBS algorithm is adopted to fit it,and the 3D model is reconstructed by using the line ridge and radius.The structured light scanning system is used to obtain point cloud data of Pipeline contour and reconstruct pipeline 3D model.The experimental results show that the proposed method and the measuring system can realize the rapid reconstruction of three-dimensional reconstruction of the pipeline,and the reconstruction data can be used to measure the gap.
line structured light;sub-pixel;3D measurement;pipe reconstruction
10.3969/j.issn.1003-3106.2017.07.16
张杰,李潘,范生宏,等.基于线扫描的管路三维重建技术研究与实现[J].无线电工程,2017,47(7):66-70.[ZHANG Jie,LI Pan,FAN Shenghong,et al.Research and Application of 3D Reconstruction Techniques of Pipeline Based on Line Scanning[J].Radio Engineering,2017,47(7):66-70.]
2017-03-27
国防基础科研计划基金资助项目。
TP391
A
1003-3106(2017)07-0066-05
张 杰 男,( 1979—) ,高级工程师。主要研究方向:精密测量技术的应用与研究。
李 潘 男,( 1988—) ,硕士研究生。主要研究方向:机器视觉和图像处理。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
民用飞机设计与研究(2020年1期)2020-05-21
软件(2020年3期)2020-04-20
土木建筑工程信息技术(2019年6期)2019-12-26
山西冶金(2019年2期)2019-05-31
腹腔镜外科杂志(2016年12期)2016-06-01
转化医学电子杂志(2015年4期)2015-12-27
中国医疗美容(2015年1期)2015-07-12
太空探索(2014年4期)2014-07-19
中国测试(2013年3期)2013-07-12
