基于总能量控制的下滑波束导引系统设计仿真
2017-06-22 14:07:40张子健龚喜盈
指挥控制与仿真 2017年3期
张 琳,张子健,龚喜盈
(西安爱生技术集团公司,陕西 西安 710065)
基于总能量控制的下滑波束导引系统设计仿真
张 琳,张子健,龚喜盈
(西安爱生技术集团公司,陕西 西安 710065)
基于总能量控制的下滑波束导引系统可以在无人机自动着陆时实现飞行速度与飞行航迹的解耦控制,从而控制无人机沿下滑线精准下滑。在研究下滑波束导引系统与总能量控制理论基础上,搭建控制系统结构及选取合适控制参数,并在Matlab/Simulink中建立无人机仿真平台,对此控制系统进行仿真研究。仿真结果表明:在整个下滑着陆过程中,基于总能量控制的下滑波束导引系统可以在实现油门与升降舵联合控制速度与下滑航迹,控制无人机快速、准确地跟踪下滑线,完成精确定点着陆。
无人机;总能量控制;下滑波束导引;解耦控制
下滑波束导引系统是飞机自动着陆时采用的一种重要无线电波束导引系统[1]。飞机在着陆前作定高飞行,当截获下滑波束线后,即按一定下滑坡度下滑,当飞机偏离波束中心线飞行时,出现波束偏差角,则下滑耦合器输出形成指令信号控制飞机产生俯仰角,迫使飞机回到下滑波束线。设计控制系统时需要关注,在下滑过程中速度控制是实现航迹控制的必要条件。飞机通过控制俯仰角运动来控制航迹,前提是假定速度基本不变。若没有速度控制系统,只通过操纵俯仰角来控制航迹是非常困难的。若单纯通过调节油门来控制速度,可能会出现油门降到最低时,下滑过程中速度仍在增加。
总能量控制(Total Energy Control-TEC)理论是Boeing公司提出的一种飞机综合飞行/推力控制系统。总能量控制的核心算法从控制飞机的能量变化率与分配率出发,从而实现对飞机飞行速度/航迹的解耦控制。L.F.Faleiro和A.A.Lambregts将飞机作为一个能量系统进行分析,对飞机速度/航迹进行解耦控制[2]。其核心算法为航迹角和加速度,控制精度及解耦性不高。张庆振等在此基础上将偏差控制引入到基于总能量控制的飞行航迹/速度解耦控制中,提高了控制精度[3]。本文在此基础上考虑与风速相关总能量变化率、分配率的油门和升降舵联合控制。采用此总能量控制算法设计的下滑波束导引系统,可以控制无人机定速下滑及精确控制下滑航迹,实现无风/有风条件下无人机精确定点着陆。
1 下滑波束导引系统设计建模
下滑波束导引系统由下滑耦合器和俯仰角位移控制系统组成。当无人机截获下滑波束线后,开始按下滑线下滑;当无人机偏离波束中心线时,出现波束偏差角[4]。无人机在下滑波束线上方时,波束偏差角为正,下滑耦合器输出形成指令信号控制无人机产生负的俯仰角,迫使无人机回到下滑波束线;无人机在下滑波束线下方时,则以相反控制过程,控制无人机回到下滑波束线。下滑过程中的几何关系如图1所示[5-6]。当ΔΓ为0时,飞机按照给定的下滑线下滑,即可以按照预定的下滑波束中心线完成进场着陆。
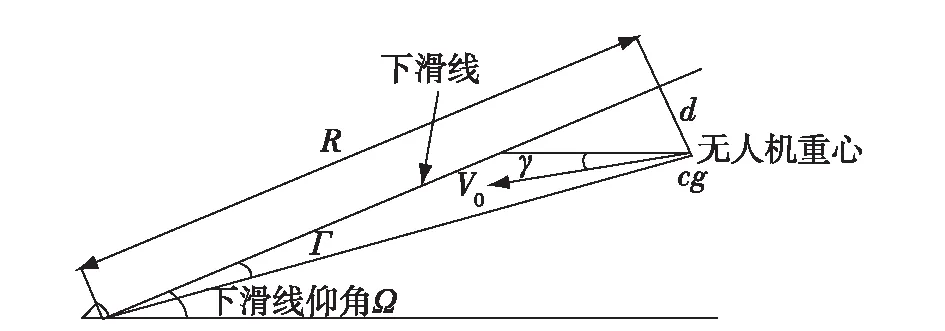
图1 下滑状态几何关系图
由图1分析得知:使用总能量控制算法来设计飞行速度/航迹解耦控制系统,可以准确控制飞机的下滑速度为V0,故V0为常值。飞机偏离下滑线即波束中心线的距离为d,飞机在下滑线上方d>0,在下方d<0。
图中R为飞机重心距离下滑信标台的斜距,d与R两个距离参数可以决定偏差角Γ,具体关系为
(1)
d、V0、Ω与γ之间的关系为:
d=V0∫sin[Ω+γ(t)]dt
(2)
γ(t)=γ0+Δγ(t)
(3)
下滑波束导引系统结构图如图2所示,为提高下滑波束导引系统的控制精度,系统中采用比例加积分的控制形式输出Δγ:
(4)
ΔΓR=Γ0R-ΓR
(5)

图2 下滑波束导引系统结构图
2 总能量控制基本原理
总能量控制通过控制飞机总能量的变化与分配,实现对飞机飞行速度与飞行航迹的解耦控制,无人机的总能量由势能和动能两部分组成,可以表示为[7-9]
(6)
其中,VG为地速。飞机总能量可以分解表示为总能量ETair(空速相关)和总能量ETwind(风速相关)[10]。
ET=ETair+ETwind
(7)
推导过程中使用的具体速度表达见图3。
判断走棋规则是否合法。如果非法,输出结果;如果合法,则判断落点是否有子。如果落点没有棋子,更新棋盘。如果落点有子,首先判断是否为本方棋子,如果是本方棋子,输出结果;否则,更新棋盘。如果吃掉的棋子为敌方将帅,则输出结果胜利。执行步骤4行棋结束后,判断两帅是否相对,如果相对执行步骤4。
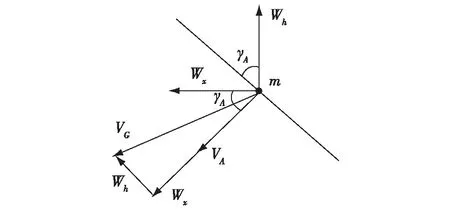
图3 地速、空速、风速关系图
其中,VG为地速,VA为空速,Wx为水平风速,Wh为垂直风速,wx和wh为速度轴系下风速的分量,γA为速度轴系与当地风场轴系之间的夹角。
wx=WxcosγA-WhsinγA
(8)
wh=WhcosγA+WxsinγA
(9)
(10)
总能量ETair和ETwind的表达式如下:
(11)
(12)
其中,hA是由于空速而导致的高度变化量,hw是由于风速而导致的高度变化量。
首先推导总能量ETair(空速相关),得到其变化率和分配率,将式(11)求导得到:
(13)
由此得到总能量ETair的变化率为
(14)
在小航迹角γ下滑时,有
(15)
(16)
代入总能量变化率得到:
(17)
定义总能量的分配率来描述势能和动能之间的比例关系:
(18)

(19)
(20)

(21)
(22)
接下来推导总能量ETwind(风速相关),得到其变化率和分配率,将式(12)求导得到
(23)
(24)
(25)
总能量控制的核心算法为发动机油门与升降舵的控制[11],发动机油门控制量与升降舵控制量如式(26)-(31):
(26)
(27)
(28)
(29)
Th=Thair+Thwind
(30)
δe=δeair+δewind
(31)
式中,KTPA、KEPA、KTPW、KEPW为比例系数,KTIA、KEIA、KTIW、KEIW为积分系数。其中使用测量值高度、速度包含噪声,直接进行数值微分对噪声有放大效应,因此需要对测量值先进行平滑滤波再进行数值微分。
飞机控制油门的改变导致飞机推力的变化,同时会一定比率地改变飞机的总能量变化率,飞机的发动机油门控制量可作为总能量变化率的主控制量。升降舵偏转主要引起飞机俯仰力矩的变化,改变飞机的飞行姿态,在油门不变化时,推力不变,控制升降舵的偏转仅仅将飞机的动能与势能进行相互转换,改变总能量在动能与势能之间的分配关系,飞机的升降舵控制量可作为总能量分配率的主控制量。总而言之,油门控制无人机总能量的变化率,升降舵控制只改变无人机的总能量分配率[12]。

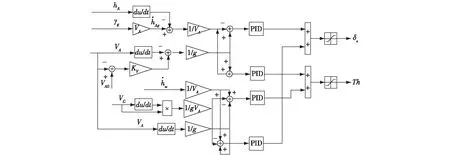
图4 总能量控制结构框图
在使用总能量控制算法来设计飞行速度/航迹解耦控制系统时,需要结合油门与升降舵联合控制速度与下滑线。当速度的实际值与目标值相差大时,油门与升降舵的联合控制权重偏重于控制速度;当速度的实际值与目标值相差小时,油门与升降舵的联合控制权重偏重于控制下滑线。在控制速度的过程中,可能需要升降舵拉大迎角增加阻力以进行速度控制,此时需要注意,迎角要控制在失速迎角以内,避免飞机失速。
3 仿真结果与分析
本文在Matlab/Simulink中建立了基于总能量控制的下滑波束导引系统仿真模型。仿真模型包括无人机本体六自由度非线性力学模型、导航系统模型、控制系统模型、动力系统模型、重力模型、标准大气模型和风模型(见图5)等。考虑有风条件为常值风和大气紊流,在Von Karman紊流模型Turbulence中加入了白噪声。仿真状态为飞机进场高度150m、速度40m/s平飞截获下滑线后,开始在总能量控制的下滑波束导引系统控制下沿下滑线下滑,预定下滑线仰角Ω为-5°。在下滑过程中既要保持速度的稳定,又要精确控制下滑角。图6-图12中给出无风条件及有风条件的仿真结果,对比说明在控制系统中加入总能量ETwind(风速相关)的变化率和分配率后,可以有效抑制振荡并精确下滑轨迹。

图5 风模型结构框图
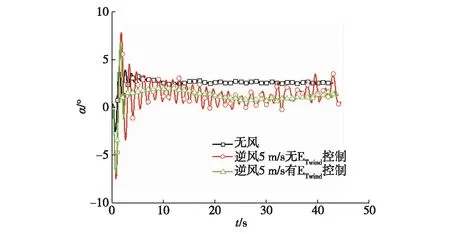
图6 迎角仿真结果α~t曲线
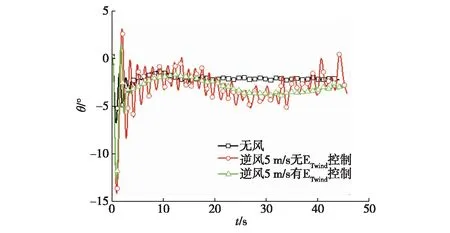
图7 俯仰角仿真结果θ~t曲线
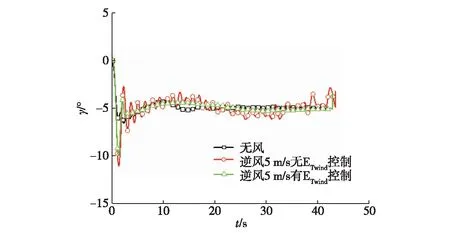
图8 航迹角仿真结果γ~t曲线
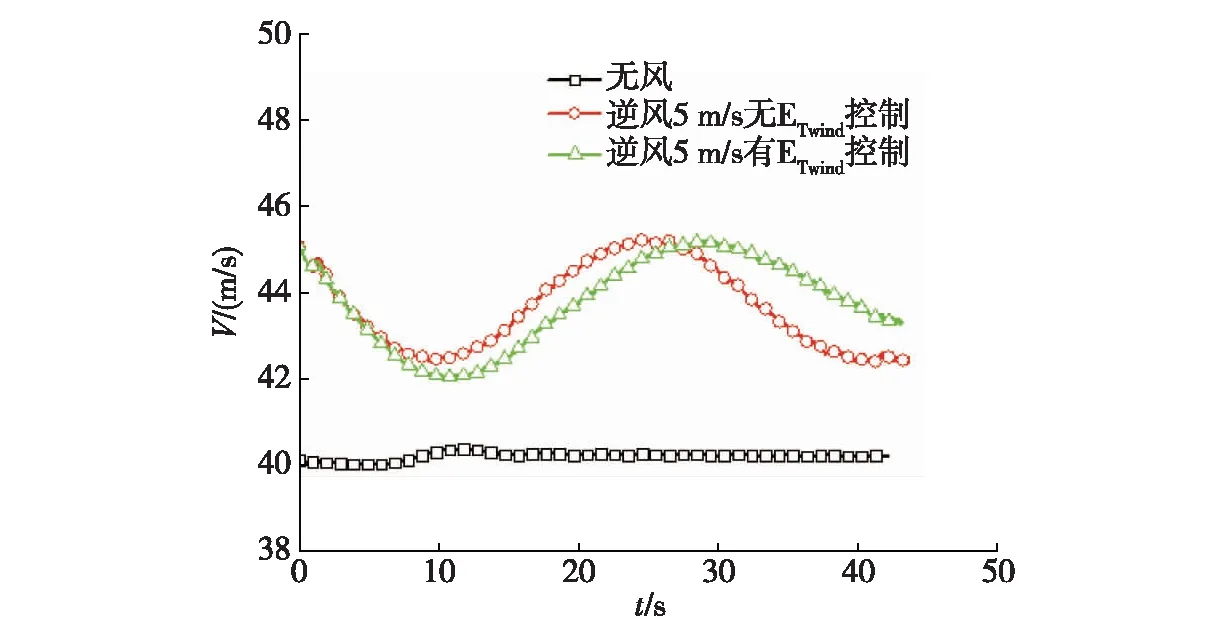
图9 速度仿真结果V~t曲线
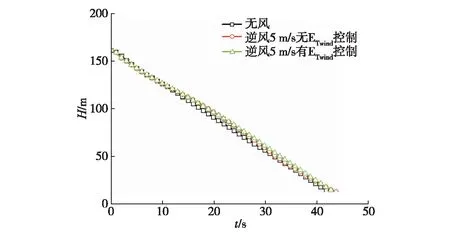
图10 高度仿真结果H~t曲线
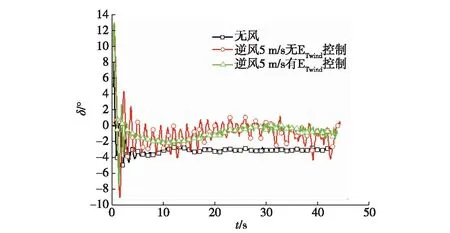
图11 升降舵偏角仿真结果δe~t曲线
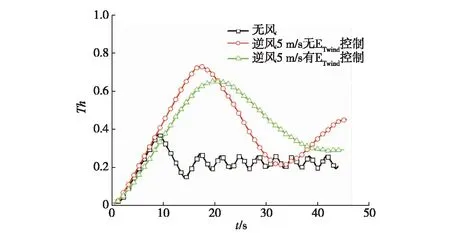
图12 油门开度仿真结果Th~t曲线
由仿真结果可以得出,基于总能量控制的下滑波束导引系统实现了油门与升降舵的联合控制速度与下滑航迹,可以快速、准确地跟踪下滑线。纵向特性分析如下:
1)在基于总能量控制的下滑波束导引控制系统作用下,整个下滑过程中飞行速度控制良好,基本保持在40m/s;
2)航迹角由定高状态的0°开始跟踪下滑线,在15s后无人机航迹角为-5°,即按照预定的下滑线下滑;
3)无人机迎角控制在失速迎角的范围内;
4)无人机定点着陆时下沉率为Vγ为3.46m/s,满足下沉率小于5m/s的要求,可以实现安全着陆。
5)由南风条件下的仿真对比曲线得出,在控制系统中加入总能量ETwind(风速相关)的变化率和分配率后,可以有效抑制振荡并精确下滑轨迹。
4 结束语
基于总能量控制设计的下滑波束导引系统其控制结构具有一定的定式,控制逻辑明确清晰,可以快速准确地控制飞行速度与飞行轨迹,但是在选择控制系统的控制参数时,基本是按照经典控制理论的方法进行选取,若要进一步优化控制系统,则需要使用现代控制方法对控制系统的控制参数进行优化选择。同时由于其控制结构和控制参数的固定模式,因此需要对控制系统的鲁棒性进行进一步的研究。
[1] 曲东才,谢曦鹏,曹栋,等. 飞机下滑波束导引系统设计及仿真[J]. 海军航空工程学院学报, 2014(3):209-212.
[2] L.F.Faleiro, A.A.Lambregts. Analysis and tuning of a ‘Total Energy Control System’ control law using eigenstructure assignment[J]. Aerospace Science and Technology, 1999, 3(3): 127-140.
[3] 张庆振,安锦文,刘小刚. 基于飞机总能量控制系统(TECS)的飞行航迹/速度解耦控制方法研究[J]. 西北工业大学学报, 2004,22(3):384-387.
[4] 张明廉.飞行控制系统[M]. 北京:航空工业出版社,1993.
[5] I.Yaesh, U.Shaked. Finite Horizon Static Output H∞Control with Automatic Beam Guidance Application[J]. Journal of Guidance Control and Dynamic, 1997, 20(3): 549-556.
[6] 刘世前. 现代飞机飞行动力学与控制[M]. 上海:上海交通大学出版社, 2014.
[7] Sheng-Wen Chen, Pang-Chia Chen, Ciann-Dong Yang. Total Energy Control System for Helicopter Flight/Propulsion Integrated Controller Design[J]. Journal of Guidance Control and Dynamic, 2007, 30(4): 1030-1039.
[8] 李冀鑫,侯志强,徐彦军. 基于总能量理论的着舰飞行/推力控制系统[J]. 飞行力学, 2010,28(2):35-38.
[9] Shu-Fan Wu, Suo-Feng Guo. Optimum Flight Trajectory Guidance Based on Total Energy Control of Aircraft[J]. Journal of Guidance Control and Dynamic, 1994, 17(2): 291-296.
[10]J. Earl Bailey,Kalmanje Kri shnakumar. Total Energy Control Concepts Applied to Flight in Windshear[C]. Guidance,Navigation and Control Conference,1987:525-532.
[11]李爱军,谢燕武,王伟. 总能量控制原理在地形跟随飞行控制中的应用[J]. 飞行力学, 2007,25(3):67-70.
[12]Anthony Warren. Application of Total Energy Control for High-Performance Aircraft Vertical Transitions[J]. J.GUIDANCE, 1991, 14(2): 447-452.
Design and Simulation of Glide Beam GuidanceSystem Based on Total Engine Control
ZHANG Lin, ZHANG Zi-jian, GONG Xi-ying
(Xi’an ASN Technology Group Co.,Ltd., Xi’an 710065,China)
The glide beam guidance system is designed based on total energy control theory. This designed control system can achieve decoupling control of flight speed and flight path in Unmanned Aerial Vehicle (UAV) automatic landing, then UAV’s accurate glide path is achieved. In this paper, the structure of the control system and the selection of appropriate control parameters are built on the basis of glide beam guidance system and total energy control theory. An UAV’s platform is established in Matlab/simulink to simulate the control system. The simulation results show that the control system can achieve the combined control of the throttle and the elevator, which can decouple flight speed and flight path angle. Using this control system, the UAV can realize precise fixed point landing.
Unmanned Aerial Vehicle (UAV); Total Energy Control(TEC); glide beam guidance; decoupling control
2016-11-21
张 琳(1984-),女,天津人,硕士,高级工程师,研究方向为飞机总体气动设计及动力学仿真。 张子健(1981-),男,博士,高级工程师。 龚喜盈(1980-),女,硕士,高级工程师。
1673-3819(2017)03-0135-06
V279;E917
A
10.3969/j.issn.1673-3819.2017.03.029
修回日期: 2016-02-26
猜你喜欢
畜牧兽医科技信息(2023年7期)2023-09-25 15:55:42
中国畜牧业(2022年20期)2022-11-19 03:16:48
西安航空学院学报(2021年3期)2021-10-14 10:34:04
岷峨诗稿(2020年4期)2020-11-18 23:54:01
智富时代(2018年11期)2018-01-15 09:52:06
中学理科园地(2016年6期)2017-01-03 21:55:52
现代农业(2015年1期)2015-02-28 18:39:54
发明与创新·小学生(2013年8期)2013-04-29 00:44:03
发明与创新(2013年24期)2013-02-27 09:14:30
时代农机(2011年10期)2011-08-15 00:55:42