反潜巡逻机使用被动全向声呐浮标对潜跟踪方法
2017-06-22 14:07:40王新为尹成义
指挥控制与仿真 2017年3期
王新为,尹成义
(海军大连舰艇学院,辽宁 大连 116018)
反潜巡逻机使用被动全向声呐浮标对潜跟踪方法
王新为,尹成义
(海军大连舰艇学院,辽宁 大连 116018)
针对反潜巡逻机使用被动全向声呐浮标对潜跟踪问题,探讨了声呐浮标对潜跟踪布设方式,研究了声呐浮标对潜跟踪方法,分析了反潜巡逻机使用声呐浮标对潜跟踪的全过程,并进行相应战术计算,重点对对潜跟踪战术指标进行仿真分析,以图表的形式给出了相应结论,为反潜巡逻机对潜跟踪研究提供参考依据。
反潜巡逻机;声呐浮标;对潜跟踪
对潜跟踪,是反潜巡逻机与潜艇保持接触和(或)在丢失接触时恢复接触的战斗行动,是航空反潜行动的重要阶段。可以认为对潜跟踪是搜潜的继续、攻潜的前提。和平时期,反潜的任务只能是跟踪,对发现任何的敌潜艇实施跟踪;战争时期,为消灭或阻吓敌潜艇,须适时对潜跟踪。对潜跟踪过程,就是不断与目标接触的过程,反潜巡逻机在搜索发现目标并识别定位后,即转入对潜跟踪。
被动全向声呐浮标是反潜巡逻机用于对潜跟踪的重要探测载荷,具有跟踪隐蔽性好的特点,且装载量最多,宜优先考虑使用。本文就反潜巡逻机使用被动全向声呐浮标对潜跟踪问题进行系统研究,为指挥员决策提供参考依据。
1 浮标布设方式
反潜巡逻机使用被动全向声呐浮标跟踪时,主要用于概略跟踪,跟踪精度较低,该方法虽不能准确定位跟踪,但可提供目标初始信息,后续可结合战场态势,加强研判。通常采用覆盖阵、拦截阵两种布放方式遂行对潜跟踪任务。当目标通过覆盖阵时,可根据阵内发现目标的浮标位置及时间等,概略判断目标可能航速和航向;当目标通过拦截阵时,根据阵间浮标丢失接触和恢复接触的时间、发现目标的浮标间距离等信息,概略判断目标航速和航行扇面,如图1、图2所示。反潜巡逻机使用被动全向浮标概略跟踪后,应尽快使用其它探测载荷遂行精确跟踪,以满足攻击条件,提高攻击效果。
图1 布设覆盖阵对潜跟踪示意图
图2 布设拦截阵对潜跟踪示意图
2 对潜跟踪方法
反潜巡逻机使用被动全向声呐浮标对潜跟踪时,既可连续性跟踪,也可周期性跟踪。实际作战中,应根据目标运动要素、飞机机动性能、浮标作用距离等要素,确定具体采用何种方法。
2.1 对潜连续性跟踪
对潜连续性跟踪是指反潜巡逻机与潜艇保持连续接触。当目标航速较低和(或)飞机挂载浮标量足够时,可采用该方法。该方法对潜接触可靠性高,可持续听测目标噪声,随时转入攻击,且恢复接触时间短,但对高速目标保持接触困难,要求反潜巡逻机频繁机动,机组人员工作强度大。
连续性跟踪时,应垂直于目标航路布放浮标阵。浮标阵间隔应能保证潜艇所经过的浮标阵能连续发现目标,且使反潜巡逻机从监听正与目标接触的浮标到布放完下一道浮标阵的时间小于目标通过相邻浮标间距的时间。相邻浮标阵间隔一般不大于2rfb,阵内浮标间隔一般取1.5rfb~2rfb(rfb为浮标作用距离),如图3所示[1]。阵内浮标数量主要取决于目标机动情况,通常目标航向不变或变化较小时,布设3~4枚浮标;目标航向变化较大时,应根据实际情况适时增加浮标数量。为避免丢失接触,可在目标航向上布设至少2道浮标阵。若相邻浮标阵均未发现目标,则认为丢失接触。为恢复接触,须布设包围型浮标阵,浮标阵型及半径主要由反潜巡逻机应召滞后时间决定。
2.2 对潜周期性跟踪
对潜周期性跟踪是指反潜巡逻机间隔一定时间对潜艇保持周期接触。采用该方式,反潜巡逻机机动程度及机组人员工作强度较低,但难以随时转入攻击,且接触丢失后恢复接触所消耗时间较长[2]。当目标航速较高或携带浮标数量有限,难以保持持续接触时,可采取该方法。此时,相邻浮标阵间距主要取决于目标航速、飞机机动性能和浮标作用距离等,浮标阵长度主要取决于目标机动范围。通常,相邻浮标线之间的距离取3rfb~5rfb,如图4所示。

图3 对潜连续性跟踪示意图

图4 对潜周期性跟踪示意图
周期性跟踪时,可根据实际情况布设拦截线。当目标航向不变,可在90°~120°扇面布设;当目标航向改变,则应扩大布放范围,在180°扇面布设。需要注意的是,接触的离散及阵内浮标数量的减小都会导致跟踪概率的降低,而丢失接触的增加将导致恢复接触时间和浮标消耗量的增加[3]。因此,对潜周期性跟踪时,应在保证声呐浮标保有量的前提下,尽量布设满足既定跟踪概率的浮标阵,尽可能避免与目标丢失接触[4]。
设相邻浮标阵间距为Dd,目标最小航速为vqt min,则周期性跟踪时的最大听测中断时间ta max为
(1)
若经过时间ta max后,目标还没有进入下一道浮标阵的探测区,认为丢失接触,立即遂行恢复接触。在目标最可能航行扇面,沿圆弧线或折线布设包围浮标阵,以恢复接触。为尽快恢复接触,可在目标可能航行扇面内布设至少2道包围型浮标阵。若仍未发现目标,认为目标丢失,反潜巡逻机立即遂行检查搜索。
2.3 对潜跟踪全过程
基于上述分析,在整个对潜跟踪过程中,目标航速是反潜巡逻机使用声呐浮标采用何种跟踪方法的重要先决条件。根据目标航速的不同,反潜巡逻机对潜跟踪过程应包括发现可疑信号、对可疑信号识别分类、保持目标连续性或周期性接触、丢失接触时恢复接触等四个部分,如图5所示。
图5 反潜巡逻机对潜跟踪全过程示意图
3 对潜跟踪战术计算
在对反潜巡逻机使用声呐浮标对潜跟踪方法研究的基础上,还需进行相应战术计算,从而确定浮标阵大小、浮标实际消耗量以及对潜跟踪效率。
3.1 浮标阵半径
声呐浮标阵半径的大小主要与目标航速相关,目标航速越大浮标阵半径越大,反之越小[5-6],其半径增加量与目标航速增加量有关。假设潜艇提速时作匀加速运动,则声呐浮标阵半径Rfb可表示为:
(2)
式中,vqt为潜艇航速;Δvqt为潜艇航速增加量;tjc为相邻浮标阵目标接触间隔;Δqt为潜艇位置定位误差;pfx为浮标阵对潜探测概率,通常应保证目标发现概率不低于0.8。
设定浮标阵发现目标概率为0.8,则表1给出了几种典型情况下的声呐浮标阵半径。
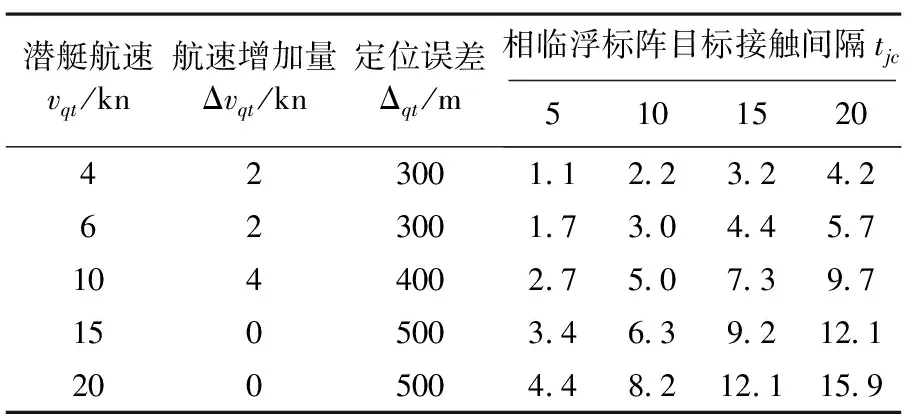
表1 几种典型情况下的浮标阵半径/km
3.2 浮标单位时间消耗量
声呐浮标单位时间消耗量,是反潜巡逻机遂行对潜跟踪的重要指标,能够反映单架或多架反潜巡逻机对潜跟踪能力。该值可确定对潜跟踪时的浮标投放数量(浮标阵布设数量)和反潜巡逻机出动架次及轮换方式,进而进行反潜巡逻机跟踪持续时间规划。
设声呐浮标投放存活率为Pch,与目标接触概率为Pjc,则声呐浮标单位时间消耗量nxh为
(3)
为找出声呐浮标单位时间消耗量与潜艇航速线性对应关系,可将式(3)中弦长运算转换为弧长运算,则声呐浮标单位时间消耗量nxh可近似表示为
(4)
式中:dfd为相邻浮标间距,km;θ为浮标阵扇面角,°。
设定声呐浮标投放存活率Pch和目标接触概率Pjc均为0.8,浮标作用距离rfb为2km,潜艇航速vqt分别为6kn和8kn,浮标阵扇面角θ分别为90°、120°、180°,则声呐浮标单位时间消耗量与相邻浮标间距对应关系分别如图6、图7和表2所示。

图6 潜艇速6kn时声呐浮标单位时间消耗量

图7 潜艇航速8kn时声呐浮标单位时间消耗量
上述分析可知,目标航速一定时,声呐浮标单位时间消耗量与保持和(或)恢复接触的浮标阵半径无关,与目标航速成正比,与相邻浮标间距成反比。因此,根据潜艇对应航速跟踪就可求得声呐浮标消耗量和所需反潜巡逻机数量[7]。

表2 声呐浮标单位时间消耗量
反潜巡逻机跟踪持续时间主要取决于:拦截型浮标阵保持接触概率、包围型浮标阵恢复接触概率、目标机动及水声对抗情况以及浮标阵半径大小等。其中,浮标阵半径越大,跟踪的期望时间越长。
3.3 对潜跟踪效率

(5)
(6)
式中:Pbj为保持接触概率,即目标发现概率;Phj为恢复接触概率;Rfb表示为恢复接触布设包围型浮标阵的半径;Dd为相邻浮标阵间距;vqt为潜艇航速。
(7)
式中:Phj为与潜艇恢复接触概率,通常情况下恢复接触概率要高于保持接触概率。

(8)
相邻浮标阵间距Dd应满足:
2rfb≤Dd≤vqt·tjc
(9)

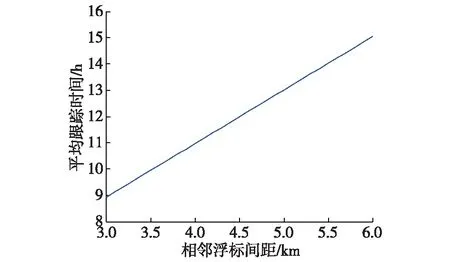
图8 平均跟踪时间与相邻浮标间距对应关系
计算表明,根据潜艇航速确定浮标阵半径后,反潜巡逻机平均跟踪时间和对潜跟踪概率,都随着潜艇航速的增大而增大。当潜艇航速变化时,浮标消耗量的变化量基本相同。因此,对潜跟踪时可采用相同的浮标阵半径,可降低反潜巡逻机机动强度和组织难度。同时,为节省浮标数量,浮标阵在180°以内扇面布设,即可使得对潜跟踪时间充足。
4 结束语
本文针对反潜巡逻机使用被动全向声呐浮标对潜跟踪问题,分析了声呐浮标对潜跟踪布设方式,研究了声呐浮标对潜跟踪方法,探讨了反潜巡逻机使用声呐浮标对潜跟踪的全过程,并进行相应战术计算,对几类跟踪指标进行仿真分析,得出结论,为反潜巡逻机对潜跟踪研究提供参考依据。
[1] 滕俊,邵晓方,吴昊. 潜艇跟踪过程中声呐浮标的作战使用[J]. 舰船科学技术,2012,34(8):90-94.
[2] 杨日杰,周旭,曾海燕.被动全向声纳浮标跟踪潜艇的优化布放方法[J]. 指挥控制与仿真,2011,33(5):80-94.
[3] 杨日杰,周旭,张林琳.主动全向声纳浮标跟踪潜艇优化布放方法[J]. 系统工程与电子技术,2011,33(10):2249-2253.
[4] 杨日杰,何友,孙明太.航空搜潜装备搜潜范围建模与仿真研究[J].系统仿真学报,2003,15(11):1547-1549.
[5] 尤廷悦,谢国新,樊洪港.舰载直升机对潜跟踪兵力需求研究[J]. 舰船电子工程,2009,29(8):45-47.
[6] 张智炜,徐远新,昊涛.被动声纳浮标阵对潜跟踪方法及定位能力研究[C].2009年系统仿真技术及其应用学术会议,2009:788-791.
[7] 丁松林,闫国玉.反潜巡逻线搜索中声呐浮标发现概率的定量评估[J].舰船电子对抗,2005,28(5):31-32.
Submarine Tracking Method of Anti-submarine Patrol AircraftUsing Passive Omni-directional Sonobuoy
WANG Xin-wei, YIN Cheng-yi
(Dalian Naval Academy, Dalian 116018, China)
According to submarine tracking problem of the anti-submarine patrol aircraft using passive omni-directional sonobuoy, this paper discusses the layout of sonobuoy for tracking submarine, studies the method of sonobuoy for tracking submarine, analyses the whole process of tracking submarine for anti-submarine patrol aircraft using sonobuoys, takes the simulation analysis for tracking index, gives out the result as the chart or table, provides the reference for the research of tracking submarine for anti-submarine patrol aircraft.
anti-submarine patrol aircraft; sonobuoy; submarine tracking
2017-03-15
王新为(1988-),男,江苏泰兴人,博士研究生,研究方向为军事运筹、舰载武器系统作战使用。 尹成义(1977-),男,博士,副教授。
1673-3819(2017)03-0060-04
TJ67;E925.4
A
10.3969/j.issn.1673-3819.2017.03.013
修回日期: 2017-04-07
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:37:24
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
水上消防(2022年1期)2022-06-16 08:06:56
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
现代防御技术(2019年1期)2019-03-12 02:35:14
数字海洋与水下攻防(2018年2期)2018-11-08 01:01:42
无人机(2018年6期)2018-09-10 02:09:40
舰船科学技术(2018年7期)2018-07-25 06:30:18
舰船科学技术(2016年1期)2016-02-27 15:39:23