
基于两轮机器人系统的自控原理实验设计
2017-06-19 03:49蔡建羡程丽娜李立新李朋轩
报刊荟萃·上半月 2017年6期
蔡建羡 程丽娜 李立新 李朋轩
摘 要:在控制理论的实践教学中,尝试采用研究型的实践教学模式,设计了基于两轮机器人系统的控制理论辅助教学实验,依次完成控制系统建模、仿真、控制算法实现。实践证明研究型实践教学模式有效实现了理论与实践相结合,有利于学生理解控制理论中的一些重要概念,了解实际系统的控制设计过程;同时,对于学生分析问题、解决问题能力的提高,对于创新人才培养,对于教师科研、教学水平的提升均有较好的作用。
关键词:实践教学;研究型;两轮机器人;创新人才培养
控制理论课程的实践教学环节是该课程重要的组成部分,教学目标是能够实现理论与工程实际紧密结合、有效培养学生分析问题和解决问题的能力。但是,目前的实验教学内容单一,通常限于验证学生在课堂上已经学过的某一定律或结论,不仅教学效果不理想,而且也限制了学生创新思想和创新能力的培养。控制理论课程具有工程应用背景,因此以实际的工程对象为教学平台,设计研究型实践教学模式,成为控制理论课程教学的主要目标之一。两轮自平衡机器人 因为它本身的自然不稳定性和非线性使它成为很好的验证控制理论和控制方法的平台。因此,本文设计了基于两轮自平衡机器人系统的控制理论辅助教学实验。
1两轮机器人结构及实验思路
采用研究型实践教学模式,设计的两轮机器人系统辅助教学实验基本思路是将两轮机器人作为工程实例贯穿整个实验教学中,以两轮机器人的自平衡控制为目标,按照一般的系统设计步骤进行实验设计。设计的实验环节包括建立适合于自动控制系统分析和设计的两轮机器人数学模型;设计系统的PID控制器,确定实验方案;搭建基于MATLAB的仿真环境,通过调整参数来进行系统性能的分析和比较。
2两轮机器人数学模型的建立
建立两轮机器人系统的数学模型,是进行控制系统分析、设计控制器和进行仿真的基础,同时也是自动控制原理的一个重要知识点和难点。这个环节首先要让学生学习机械系统基本的建模方法,通过对两轮机器人系统的建模,可以让学生了解常用的建模方法,并明确所讨论两轮机器人的输入输出变量,真正理解控制系统建模的思路。同时,也让学生明确了建立系统模型并进行线性化处理的原因,工程的近似处理思想。
3两轮自平衡机器人PID控制器的设计
本环节首先要让学生明确PID控制的原理,然后在得到的两轮机器人系统线性数学模型基础上,完成PID控制器的设计和仿真任务,实现两轮机器人的自由平衡运动控制。
例如,设计自由平衡运动模式下的脉冲响应实验,给定机器人倾角初值,其它状态均为0,模拟突然给机器人施加推力,使之偏离平衡位置,观察机器人是否可以回到平衡位置。控制器设计如下:
(1)
上述控制器其实是对倾角θ和轮子中心速度各设计了一个PD控制器,理论上只反馈倾角θ设计PD控制器就可实现机器人的平衡控制,但是输出会有振荡,因此为了消除振荡,需要反馈轮子加速度。PD控制器参数调试采用试凑法结果为:。
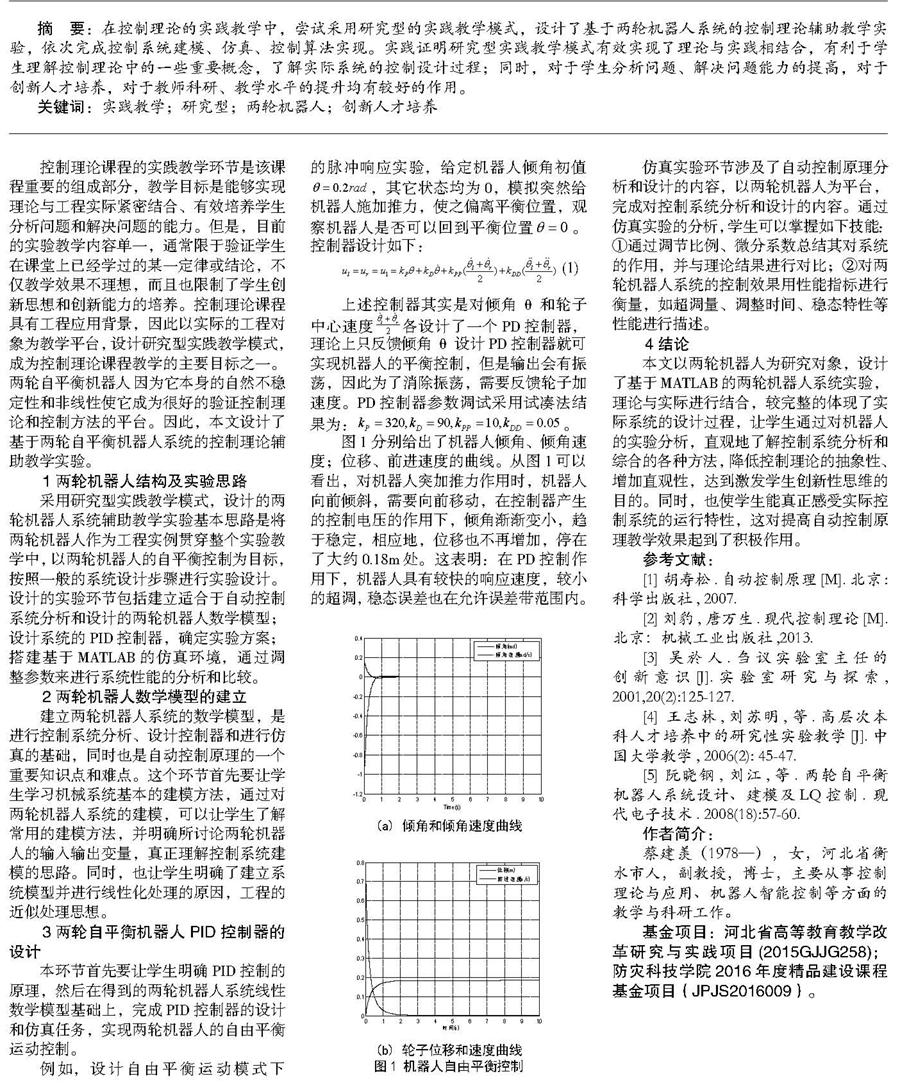
图1分别给出了机器人倾角、倾角速度;位移、前进速度的曲线。从图1可以看出,对机器人突加推力作用时,机器人向前倾斜,需要向前移动,在控制器产生的控制电压的作用下,倾角渐渐变小,趋于稳定,相应地,位移也不再增加,停在了大约0.18m处。这表明:在PD控制作用下,机器人具有较快的响应速度,较小的超调,稳态误差也在允许误差带范围内。
(a) 倾角和倾角速度曲线
(b) 轮子位移和速度曲线
图1 机器人自由平衡控制
仿真实验环节涉及了自动控制原理分析和设计的内容,以两轮机器人为平台,完成对控制系统分析和设计的内容。通过仿真实验的分析,学生可以掌握如下技能:①通过调节比例、微分系数总结其对系统的作用,并与理论结果进行对比;②对两輪机器人系统的控制效果用性能指标进行衡量,如超调量、调整时间、稳态特性等性能进行描述。
4结论
本文以两轮机器人为研究对象,设计了基于MATLAB的两轮机器人系统实验,理论与实际进行结合,较完整的体现了实际系统的设计过程,让学生通过对机器人的实验分析,直观地了解控制系统分析和综合的各种方法,降低控制理论的抽象性、增加直观性,达到激发学生创新性思维的目的。同时,也使学生能真正感受实际控制系统的运行特性,这对提高自动控制原理教学效果起到了积极作用。
参考文献:
[1] 胡寿松.自动控制原理[M].北京:科学出版社, 2007.
[2] 刘豹, 唐万生.现代控制理论[M].北京:机械工业出版社,2013.
[3] 吴於人.刍议实验室主任的创新意识[J].实验室研究与探索, 2001,20(2):125-127.
[4] 王志林,刘苏明,等.高层次本科人才培养中的研究性实验教学[J].中国大学教学, 2006(2): 45-47.
[5] 阮晓钢, 刘江,等. 两轮自平衡机器人系统设计、建模及LQ控制. 现代电子技术. 2008(18):57-60.
作者简介:
蔡建羡(1978—),女,河北省衡水市人,副教授,博士,主要从事控制理论与应用、机器人智能控制等方面的教学与科研工作。
基金项目:河北省高等教育教学改革研究与实践项目(2015GJJG258);防灾科技学院2016年度精品建设课程基金项目(JPJS2016009)。
猜你喜欢
现代职业教育·高职高专(2021年1期)2021-08-27
科学与财富(2021年35期)2021-05-10
新课程·中旬(2017年9期)2017-11-18
东方教育(2017年3期)2017-05-18
商场现代化(2016年29期)2016-12-23
东方教育(2016年4期)2016-12-14
考试周刊(2016年79期)2016-10-13
考试周刊(2016年79期)2016-10-13
大学教育(2016年9期)2016-10-09
成才之路(2016年26期)2016-10-08
报刊荟萃·上半月2017年6期