结合熵与局部信息的伪影偏差场修正CV模型
2017-06-19 19:00王新征卜雄洙于靖牛杰
哈尔滨工程大学学报 2017年5期
王新征,卜雄洙,于靖,牛杰
(南京理工大学 机械工程学院,江苏 南京 210094)
结合熵与局部信息的伪影偏差场修正CV模型
王新征,卜雄洙,于靖,牛杰
(南京理工大学 机械工程学院,江苏 南京 210094)
针对Chan-Vese(CV)模型对含有伪影、光照不均的图像不能进行有效分割的不足,本文提出了结合熵与局部信息的动态伪影偏差场修正CV模型。模型根据区域同质性特征,利用熵构造区域能量系数,自动调节目标与背景区域在模型中的权重。采用全局与局部结合的方式自适应控制区域演化。将伪影指示函数应用到区域检测项,无需先验灰度信息即可消除异常值,精确地使像素归类。结合Retinex理论对图像进行分解,忽略亮度变化并提取不含照度信息的目标结构图像,避免偏差场对分割的影响。通过与CV模型、LIF模型对比验证了算法的有效性,结果表明,本文提出的算法在目标干扰严重情况下分割性能最优,重叠率可达0.9,误分割率控制在0.06以内。与CV模型、LIF模型相比分割精度与速度性能优势明显。
图像分割;CV模型;水平集演化;熵;局部信息;伪影检测;偏差场修正;Retinex理论
图像分割是将图像中具有特殊意义的区域划分出来,作为后续特征提取分析的目标对象[1]。CV模型以其良好的目标几何拓扑变化搜寻能力及模糊边缘处理能力广泛的应用于图像分割中[2]。然而由于各种因素影响,图像往往具有偏差场、伪影等问题,使得基于灰度一致性的CV模型图像分割效果较差甚至失败[3]。Li等提出的局部二值拟合(local binary fitting, LBF)模型引入基于核函数的局部区域二值拟合能量项,可对局部信息进行较为准确的提取,一定程度上克服了图像灰度不均匀性,但该模型分割效果仍不理想,需反复计算[4]。Zhang等在LBF的基础上提出了局部图像拟合(local image fitting, LIF)模型,该模型采用高斯滤波规则演化水平集函数以避免反复计算,加快演化速度,但速度仍有待提高[5]。LU等提出的高斯约束CV模型,无需周长约束项和重复初始化,分割速度较快,但只针对圆形物体的分割进行了研究,这些算法在目标不连续、存在伪影时分割困难,时间消耗也大[6]。文献[7]采用无关曲率方向的快速分割方法,仍达不到实时性要求。消除伪影方面目前算法大多基于图像先验知识,如CT金属伪影、灰度不均匀性、磁化性伪影等,需根据不同情况采用相应的分割方法[8]。文献[9]在CV模型中引入L1变量处理异常值,具有鲁棒性高的优点,但模型区域检测项仅对应于高斯加性先验噪声,脉冲噪声或其他伪影依然会影响区域统计。为避免灰度不均、伪影对分割的影响,加强模型对检测区域演化的控制,本文引入伪影检测、局部邻域信息,结合Retinex分解后保留目标结构特征的图像,改善区域检测项,采用熵自适应调节区域权重,提高分割准确性,摒弃传统模型基于符号距离函数的梯度下降求解方法,采用相场形式加快分割速度。
1 CV模型
CV模型是一种简化的主动轮廓(mumford-shah, MS)模型,能够自动处理曲线的拓扑变化,适用于复杂结构的分割[2],其数学表述为:设I为二维定义域Ω上的图像,被任意闭合轮廓曲线分为内外两个同质区域,曲线采用零水平φ表示,其能量泛函为

(1)
式中:第一项用于限定轮廓演化时零水平集函数周围取值。Heaviside函数H用于划分区域,μ、λ1、λ2均为大于零的权值,后两项为区域检测项,用于驱动边界演化,c1、c2分别为内外两个同质区域灰度均值。关于上式最小化求解的欧拉方程表示如下:

(2)
式中:δ(φ)为Diract函数。
由于CV模型基于的灰度分布是同态的,因此对于含有灰度不均的图像无法正确获得其区域检测信息。
CV模型计算能量泛函时,函数δ(φ)使得图像内部能量只涉及到水平集各点邻域,相应的轮廓线也只沿着水平集各点发生变化,每次更新都需重新初始化,分割速度难以快速化。基于此提出了基于熵与局部信息的伪影偏差场修正CV模型。
2 优化的CV模型
2.1 相场求解方法
如前所述,在CV模型中,H(φ)用于划分演化区域且δ(φ)=H′(φ),采用水平集求解时,δ(φ)仅在零水平集函数周围取值,很难实现整副图像的快速分割。目前很多改进的CV模型将Heaviside函数设置为H(φ)=φ,δ(φ)=1,其模型如下

λ2(I-c2)2]φ
(3)
(4)
关于上述模型,当轮廓演化到一定程度时,水平集φ趋于±∞,无法保证算法稳定。该问题可通过限定φ解决,简单的令φ:Ω→{0,1},即可有效的表达原CV模型中H(φ)的特征,此时H(φ)=φ被称为相场。采用相场的方式可允许所有点进行轮廓移动,加速拓扑变化和收敛速度。
然而无论H(φ)怎么选择,CV-PDE模型均很难求解,其原因为div(φ代表φ的平均曲率,φ的演化速度与该曲率成正比,当出现时,求解过程仍需重新初始化,从而产生大量耗时。Esedoglu等采用类似阈值求解的MBO框架近似水平集曲率演化,其过程不必考虑的情况,避免水平集重新初始化[10],其求解框架为
(5)
将其集成到CV模型中,其求解步骤为:
1)计算模型区域检测项,即
(6)
2)根据热方程计算相场
(7)
3)阈值扩散更新相场
φ=1·(φ>1/2)
(8)
2.2 熵与局部信息
对于非均匀目标分割,CV模型通常是将权值λ1、λ2固定,一般取1,该设置未考虑演化过程中目标及背景区域的同质性信息变化。作为平均信息量的表征,熵可通过描述区域统计的相似性来表明分布差异,因此可将熵引入到优化模型中替代λ1、λ2作为目标区域内外的权值系数[6],以使得系数随区域演化而自动变化,自动调节目标内外部区域同质性所占的比重,调节后的CV模型如下:
(9)
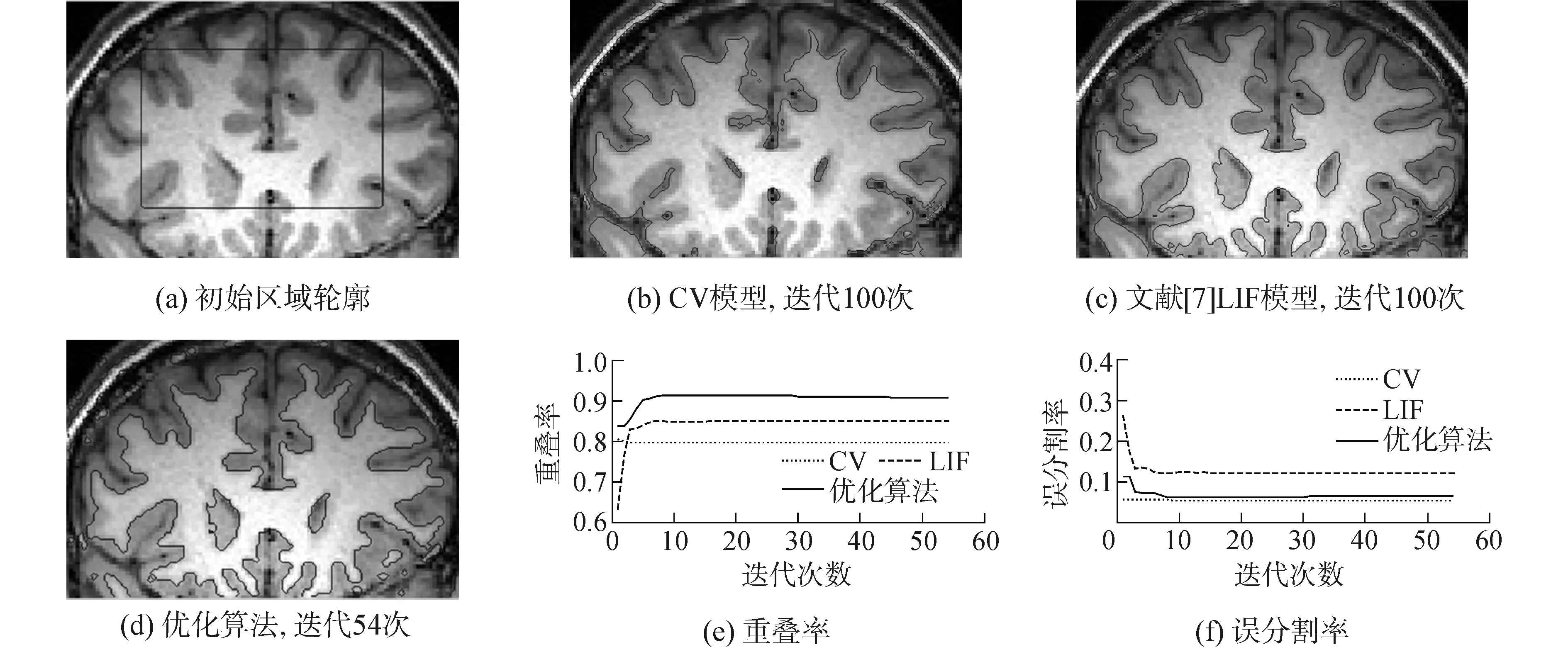
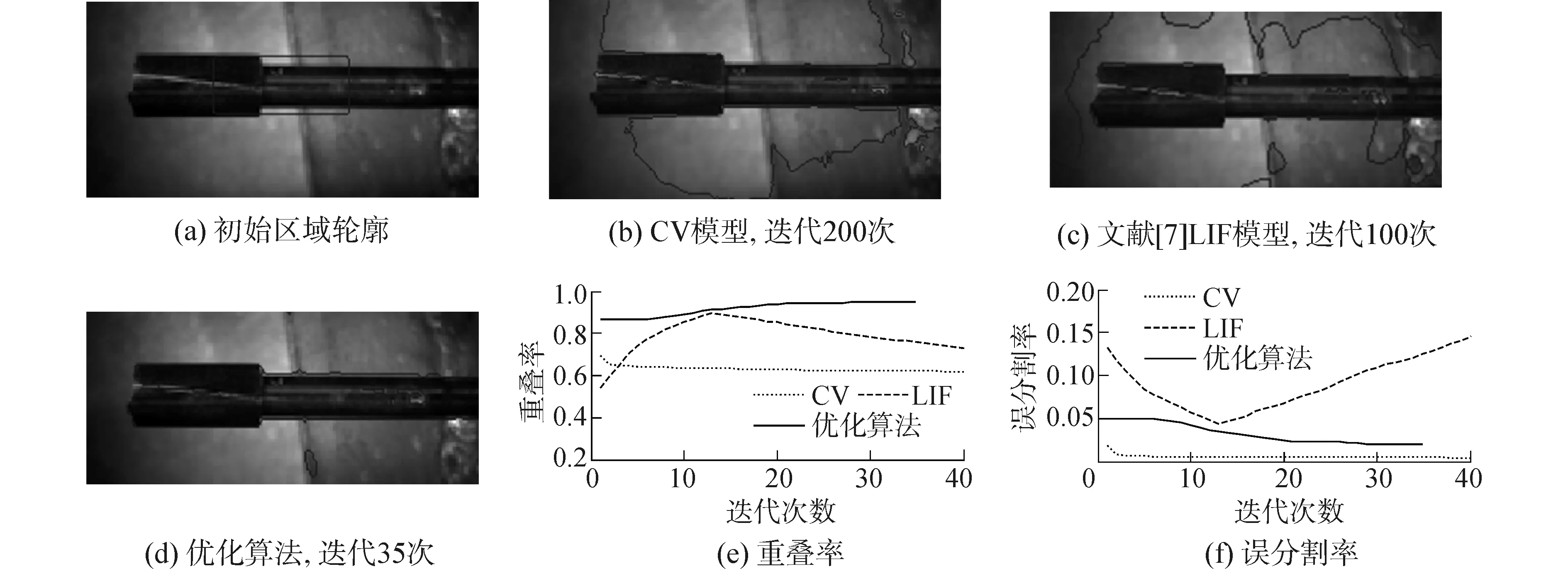
式中:Ei、Eo分别表示轮廓内部与外部区域的熵,pi、po分别为图像内外部区域的概率密度函数。当pi>po时,说明相场中某点在轮廓内部分布占优势Ei 区域划分时,由于CV模型仅考虑整体信息,对灰度非均匀、结构复杂等造成的弱边界分割效果差,因此分割非均匀图像时,参考LIF模型思想,将界面局部信息集成到模型中,并引入全局指示函数对模型(9)中的内外部区域均值进行重新定义即 (10) 2.3 伪影检测 (11) 式中:(1-X)=1表示非伪影区域,加入区域检测项后可抑制轮廓向伪影区域演化。罚因子γ用于分割时对伪影进行区分和优化。该模型不依赖于先验噪声信息及伪影形状分布情况,直接将不符合CV模型分段常数假设的孤立的点或者小的像素区域作为伪影排除出模型统计与区域演化过程外。 2.4 偏差场校正 图像获取过程中因环境光照不佳等原因往往造成灰度不均,同一物体或材料灰度差异极大,目标与背景灰度范围不统一,此时简单的灰度或噪声方差统计不能有效分割和识别目标,且光照不均使得CV模型的两相分段常数假设不成立。处理该问题时通常是放弃该假设,采用分段光滑的CV模型代替,如文献[11]的区域拟合能量分割算法。为了保证CV模型的分段常数特性,采用Retinex图像分解的方式消除光照不均,改进分割模型。 Retinex理论中,图像主要由照射分量b和反射分量r构成,b在图像上表现为偏差场,r表示材料的反射性质,反映真实的图像结构。Retinex理论以加性图像模型进行说明,即 I=B+R (12) 式中:B、R分别为照射分量b和反射分量r的对数形式,该模型有两个目的,一是符合人眼非线性特性,二是简化计算,便于将Retinex理论应用到CV模型中,丢弃光照偏差场,只保留符合分段常数假设部分进行处理。但是CV模型前提为两相分段假设,仅简单的在分割前对图像进行Retinex分解提取材料结构执行,忽略了这一假设所需的更为鲁棒的先验知识。为使模型在满足假设的同时不需预处理即可实现偏差场校正提取,改进模型如下: (13) (14) (15) 2.5 优化算法迭代步骤 优化后的模型(14)可避免伪影、偏差场等对图像分割的影响,实现快速准确分割,模型中涉及到的改进均至关重要。引入的伪影检测和偏差场校正在模型中是必不可少的,二者之间也相互影响,即伪影检测中所针对的伪影和异常值,一般与背景间的对比度较高,Retinex分解时,往往将此部分内容归于真实结构中,使得分割时的灰度统计出现错误,而不均匀的光照会使得一些像素在其所在区域内表现异常,造成伪影信息识别错误,提出的模型很好的解决了这一问题。熵信息可自适应调节目标与背景区域分割时的同质性比重,改善目标与背景演化时的拟合能量比重,解决参数不易设置的问题。兼顾全局与局部的思想能避免残留灰度不均问题,一定程度上改善弱边界分割,相场求解方法可加速收敛降低耗时。根据上述内容优化模型分割流程如下: 算法步骤具体描述如下: 1) 初始化分割区域,即属于目标区域的相场设置为φ=1,背景区域为φ=0。初始化伪影检测指示函数、结构图像与偏差场图像,即X0=0,R0=I,B0=0。 3) 采用式(6)~(8)求解方法,利用优化模型的区域检测项以一定时间步长τ>0演化轮廓相场φ,即 (16) 4) 采用下式更新伪影指示函数X (17) 5) 根据式(15)估计偏差场图像Bn+1以及结构图像Rn+1,通过λn+1=λn+2ρ(I-B-R) 更新拉格朗日乘数λ。 6) 如果φn+1=φn则迭代停止,否则转步骤2循环至满足迭代条件。 为了验证优化模型的分割效果,对相关图片进行了分割对比实验,实验基于Inter®CoreTM3.0 GHz,win7系统,4G内存PC机,Matlab R2014a平台上实现,无任何代码优化。实验采用,视觉和客观评价两种评价方式,主观视觉主要观察分割结果与实际目标的重合以及误分割程度,客观评价包括重叠率(OR)和误分割率(ISER),OR越高, ISER越低,表示分割效果越好,OR=1、ISER=0时,表示完全正确分割。其表达式如下: (18) 式中:fmanual、fmethod为人工与算法分割的图像目标区域集合,bmanual、bmethod为人工与算法分割的图像背景区域像素集合。为便于比较分析,各实验均采用图像均含有部分伪影,每个实例初始演化区域相同,参数设置为τ=10、ρ=0.75、γ=0.2。 图1是灰度不均匀的医学图像,由图1(b)知CV模型虽然可将一部分目标提取出来,但OR仅有0.77,ISER却达0.19,分割精度低,对于与背景灰度接近的目标分割失败。图1(c)表明LIF算法由于加入了局部信息,利于对弱边界的分割提取,OR提高至0.85,但仍无法克服图像灰度不均所带来的局限,如图1(c)左右下方的误分割现象,且图中一些拓扑结构细小的目标区域也未提取出来,ISER达0.12,耗时较长约10.21s。优化算法满足停止条件时的迭代次数为54次,从主观视觉可看出,算法能够对灰度与背景接近的弱目标进行有效的辨识和提取,OR为0.91,有效的捕捉到了图1(b)、(c)未提取出的特征,ISER也相对降低仅0.06,用时1.02s,达到实时要求。图1(e)与图1(f)为OR与ISER曲线,为了便于观察图中仅显示各算法区域演化相对稳定时的迭代部分,由图知,优化算法收敛速度快,在保持较低ISER的情况下可获得较高的重叠率。 图2为偏差场严重的T目标图像,由于偏差场干扰,CV模型对目标和背景区域对比度较低部分提取能力差,不能正确分割图像,如图2(b)所示,客观评价指标来看,ISER达0.60,OR仅有0.04,分割失败。文献[7]能够提取出主要的目标边界,但是误分割现象严重,如图2(c)的左上与左下部分,而且由重叠率与误分割率曲线可知,这两个部分重叠率与误分割现象会随着迭代次数增加恶化,图2(c)中为区域演化相对稳定时的结果,其ISER为0.06,ISER为0.90,计算量较大,耗时11.12s。优化算法满足停止条件时的迭代次数为14次,从主观视觉可看出,模型与文献[7]相比能够较为精确的提取出T型边界,且误分割率较低,ISER仅为0.01,OR可达0.98,分割精度较高,且用时为0.68s,时间消耗量比文献[7]有所减少。重叠率与误分割率曲线表面,优化算法可靠性较好。 图1 含灰度不均情况的脑部MRI图像Fig.1 MRI slice with intensity inhomogeneity 图2 偏差场严重的T型目标Fig.2 Strong bias T-object image 图3是某工件实际磁粉检测图像,从图3(a)中可看出,图像光照不均现象严重,背景对目标提取干扰较大,如图像中间区域与右侧边缘部分反射现象严重。图3中由于工件具有强对比度的磁痕,如直径较大部分倾斜线形磁痕与右侧片状磁痕,这在实际检测中是需要的,因此提取工件时,对工件上方磁痕干扰忽略不计。由图3(b)、(c)可知,两种算法区域演化稳定时,对比度较弱的区域边界未检出,周围较暗部分误分割现象严重,分割失败,LIF消耗时间长,迭代100次耗时13.14s,即便在其重叠率与误分割率最好的迭代次数13时,其迭代时间也有1.76s。图3(d)表明优化算法在迭代35次的情况下,能够忽略背景对工件提取的干扰,可降低磁痕对工件边缘的影响,通过简单处理即可精确的分割出目标,算法客观评价标准重叠率可达0.95,误分割率0.02,耗时1.16s,满足实际需求。重叠率与误分割率曲线说明了优化算法迭代次数易于控制,迭代收敛的快速性、稳定性与可靠性较好。 图3 实际磁粉检测工件图像Fig.3 Workpiece surface image by magnetic testing 1) 本文算法可自动调节区域能量系数,可忽略照度变化、灰度不均影响,精确地使像素归类,与CV模型、LIF模型的实验结果对比可以看出,优化算法误分割率小,重叠率最优。 2) 本文算法适合灰度、光照不均图像的快速准确分割,但还需对模型多目标分割方面做进一步改进,使算法能够应用到目标结构复杂多样的自然图像分割中。 [1]张铭钧,万媛媛,李煊.水中光视觉图像分割及目标提取方法[J].哈尔滨工程大学学报, 2013, (12): 1580-1586. ZHANG Mingjun, WAN Yuanyuan, LI Xuan. Image segmentation and target extraction based on underwater optical vision[J].Journal of Harbin Engineering University, 2013, (12): 1580-1586. [2]CHAN T F, VESE L A. Active contours without edges[J]. IEEE transactions on image processing, a publication of the IEEE signal processing society, 2001, 10(2): 266-277. [3]DOMINIQUE Z, JING A, JAMES S, et al. Image segmentation with dynamic artifacts detection and bias correction[J]. AIMS inverse problems and imaging, 2015, 11(3): 577-600. [4]LI Chunming, KAO Chiuyen, GORE J C, et al. Implicit active contours driven by local binary fitting energy[C]. IEEE Conference on Computer Vision & Pattern Recognition, 2007: 1-7. [5]ZHANG Kaihua, SONG Huihui, ZHANG Lei. Active contours driven by local image fitting energy[J]. Pattern recognition, 2010, 43(4): 1199-1206. [6]卢振泰, 郑倩, 冯衍秋,等. 基于熵和局部邻域信息的高斯约束CV模型[J]. 计算机学报, 2013, 36(5): 1076-1085. LU Zhentai, ZHENG Qian, FENG Yanqiu, et al. Gaussian regularizing CV model based on entropy and local neighbohood information[J]. Chinese journal of computers, 2013, 36(5): 1076-1085. [7]吴鹏,李雯霖,宋文龙.基于C-V模型无关曲率方向的快速分割算法[J]. 哈尔滨工程大学学报, 2015,36 (12): 1632-1637. WU Peng, LI Wenlin, SONG Wenlong. A fast segmentation algorithm with curvature-independent direction based on the Chan-Vese model[J]. Journal of Harbin Engineering University, 2015, 36(12): 1632-1637. [8]SHARMA N, AGGARWAL L M. Automated medical image segmentation techniques[J]. Journal of medical physics, 2010, 35(1): 3-14. [9]JUNG M, KANG M, KANG M. Variational image segmentation models involving non-smooth data-fidelity terms[J]. Journal of scientific computing, 2014, 59(59): 277-308. [10]ESEDOGLU S, TSAI Y H R. Threshold dynamics for the piecewise constant mumford-Shah functional[J]. Journal of computational physics, 2006, 211(1): 367-384 [11]LI CHUNMING, KAO CHIUYEN, GORE JOHN C, et al. Minimization of region- scalable fitting energy for image segmentation[J]. IEEE transactions on image processing, a publication of the IEEE signal processing society, 2008, 17(10): 1940-1949. [12]JORGE N, STEPHEN J W. Numerical optimization[M]. 2nd ed. Berlin: Springer, 2006, 304-351. 本文引用格式: 王新征,卜雄洙,于靖,等.结合熵与局部信息的伪影偏差场修正CV模型[J]. 哈尔滨工程大学学报, 2017, 38(5): 778-783. WANG Xinzheng,BU Xiongzhu,YU Jing,et al.Artifacts detection and bias correction CV model based on entropy and local information[J]. Journal of Harbin Engineering University, 2017, 38(5): 778-783. Artifacts detection and bias correction CV model based on entropy and local information WANG Xinzheng, BU Xiongzhu, YU Jing, NIU Jie (School of Mechanical Engineering, Nanjing University of Science and Technology , Nanjing 210094, China) Since the Chan-Vese model is difficult to achieve effective segmentation for an image containing artifacts and uneven illumination, a CV model combining entropy and local information and used for amending the dynamic artifact bias field was proposed. In the model, based on the homogeneity of a region, entropy was utilized to constitute a regional energy coefficient, the weights of the target and the background region in the model can be automatically regulated. The local and global information were combined to realize the adaptive control of regional evolution. An artifact indicator function was introduced to prevent intensity outliers and the Retinex theory was used to obtain the piecewise-constant structural part of the image, which prevented the adverse effect of bias to segmentation. Compared with the CV and LIF models, the effectiveness of the algorithm was verified. The results show that the proposed algorithm has the optimum segmentation performance in the case where an object is seriously disturbed; the overlapping rate can reach 0.9 and the wrong segmentation rate can be controlled below 0.06. Comparing with CV and LIF, the proposed method has the best segmentation accuracy and computational efficiency. image segmentation; Chan-Vese model; level-set evolution; entropy; local information; artifact detection; correction of bias field; Retinex theory 2016-02-26. 日期:2017-04-26. 国家自然科学基金项目(61105094);江苏省科研创新计划(CXLX12-0189). 王新征(1986-), 女, 博士研究生; 卜雄洙(1966-), 男, 教授,博士生导师. 卜雄洙,E-mail:buxu105@mail.njust.edu.cn. 10.11990/jheu.201602035 TP911.73 A 1006-7043(2017)05-0778-06 网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20170426.1041.030.html





2 实验结果及分析

4 结论
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
中国医疗器械信息(2019年3期)2019-03-09
中国医学影像学杂志(2018年9期)2018-10-17
自动化学报(2017年5期)2017-05-14
系统医学(2016年8期)2016-02-20
中国卫生标准管理(2015年4期)2016-01-14
中国医学装备(2015年10期)2015-12-29