
关节间隙对机械臂末端定位精度的影响研究
2017-06-15 18:32:45许昌瑀董惠敏王承刚田志涛
制造业自动化 2017年5期
许昌瑀,董惠敏,王承刚,田志涛
(1.大连理工大学 机械工程学院,大连 116024;2.大连运明自动化技术有限公司,大连 116000)
关节间隙对机械臂末端定位精度的影响研究
许昌瑀1,董惠敏1,王承刚2,田志涛2
(1.大连理工大学 机械工程学院,大连 116024;2.大连运明自动化技术有限公司,大连 116000)
建立了由关节间隙引起的机械臂末端定位误差的数学模型并且提出了一种概率的方法联系单个关节的间隙误差与机械臂末端定位误差的关系,并得出末端定位误差特性。方法中运用了蒙特卡洛模拟,相比解析法的繁杂,蒙特卡洛模拟更为简单方便,它不仅可得出机械臂末端定位误差的极限值,而且还能得到末端定位误差的概率密度分布和分布的一些数值特征。学者研究关节间隙误差时常见有两种方法,确定性方法和概率论方法,通过综合这两种方法能更好地考虑影响关节间隙误差方向的主要因素和一些不确定性因素。 最后数值举例阐述了这一思路。这些工作可为机器人设计和工作位点规划提供一个参考并能有效的平衡精度需求和经济效益。
关节间隙;蒙特卡洛模拟;工业机器人;末端定位精度
0 引言
随着机器人在工业自动化领域的快速发展,国内外学者对机器人的精度和特性研究越来越重视。其中,定位精度是机器人一项很重要的特性。影响定位精度的因素很多,其中很主要的一个因素就是关节间隙。对于绝大多数机构,关节间隙是不可避免的,比如一些加工误差,磨损,装配误差以及轴承间固有间隙都导致关节间隙的出现。不像由制造加工或者是机械臂变形引起的系统结构误差可以通过标定之后补偿抵消,低重复性的关节间隙误差引起的定位误差具有随机性很难补偿抵消。对于关节间隙,一些学者研究其产生的动力学影响比如由关节间隙引起的接触力,间隙间碰撞和振动等等[5,8]。还有一些学者关注其产生的运动学影响包括机构精度的评估,机械臂的重复定位精度以及机械臂末端误差的数学模型[2~4,6,7,9~11]。现在主流有两种方法来研究关节间隙引起的运动学问题:确定性方法和离散性方法。确定性方法主要是通过假设的接触力模型来确定关节间隙内接触点从而确定关节间隙误差大小和方向而离散的方法主要是从概率论的方法来处理这个不确定因素问题。
研究各个关节间隙误差在传动链下累积到末端的定位误差时,Innocenti, C.[2]提出了一种基于虚功而得到各关节间隙误差和产生的末端定位误差的关系。之后Stefano,V.和Vincenzo, P. C.[9]进一步完善了这种方法。有些学者则运用几何的方法来得到末端的极限定位误差比如Ting, K. L.和Tsai, M. J.[10]做的工作。而对于一些结构简单的特定的机器人机构,一些学者直接应用坐标变换的方法来得到末端的定位误差模型(由关节间隙引起的误差),比如Jawale,H.P.[3]用这种方法分析研究了一个五连杆平面机械臂。Nicolas, B.[6]提出了一个系统的应用坐标变换来研究机械臂末端定位误差的方法。
在考虑关节间隙引起的运动学问题时多数学者研究机械臂末端产生的极限误差用此来保证允许的最大定位精度[6,10]。也有一些学者研究在工作空间内的合理的轨迹规划,即当存在关节间隙时怎样合理规划工作轨迹能降低和最小化末端的偏差[4,7]。极值的研究确实很重要,但事实上定位误差到达极值附近的概率非常小。应用概率的方法不仅能得到误差的极值还能得到定位误差的概率分布以及一些数值特征,为更好的达到设计时机械臂的精度需求和经济效益的平衡提供参考。
1 定位误差模型的建立
3-DOF串联型工业机械臂广泛应用在多个工业领域,如焊接,喷涂,搬运等,常见结构如图1所示,相应机构简图如图2所示。定义坐标系B0为基底坐标系,机械臂各臂杆坐标系为Bi,i=1,2,3,Oj为坐标系Bj(j=0,1,2,3)原点,坐标原点位于各关节轴线上,臂杆长度为li,臂杆1,2,3位于同一平面α。zi轴沿着R为关节的轴线方向,x1轴在平面α内并垂直于z1轴,x2,x3轴沿着臂杆2,3方向。定义h为O0到O1的高度,θc定义为x1轴和臂杆l1之间的角度,为固定常量。θi(i=0,1,2)微关节i的旋转角。θ1,θ2为轴xi+1到臂杆li的角(逆时针为正)。
图1 3-DOF串联式机器人
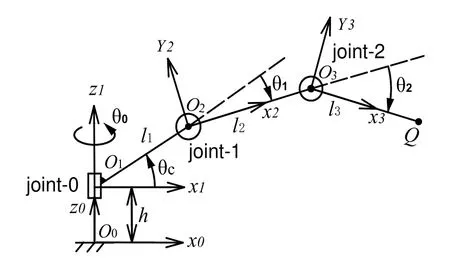
图2 机构运动简图
上述给出了没有关节间隙的理想运动简图。事实上,关节间隙是不可避免的,考虑关节间隙时,暂且只考虑转动关节存在的间隙尺寸误差忽略间隙之间的形状误差并假设轴孔之间连续接触,当只研究机械臂末端的定位误差而不考虑它的姿态误差时(工业机器人姿态一般由末端机械手的三自由度保证),可假设轴与孔的轴线平行。由此关节间隙误差ε可以简化为一个平面向量,其大小是一个常数ε=R-r(轴孔半径差),方向θε可如图3定义。机构简图如图4所示。
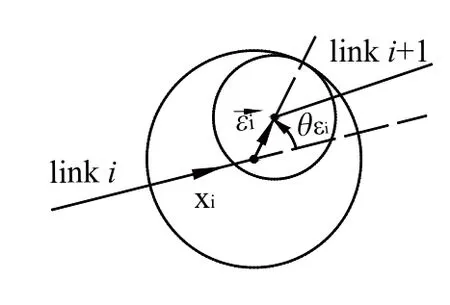
图3 关节间隙误差向量
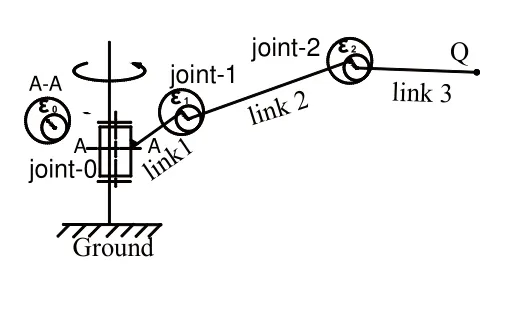
图4 机构简图(存在关节间隙)
用εi和θεi分别表示关节i的间隙误差大→小和方向,其中θεi定义为坐标轴xi指向间隙误差向量i的角(逆时针为正),i=0,1,2。考虑机械臂末端点Q,应用坐标变换由图二得 ,B0PQ和B3PQ分别为Q点在基底坐标B0和臂杆坐标B3下的坐标表示,其中是从B到B的坐标变换矩阵,其中ii-1旋转(θx,i-1,i,θy,i-1,i,θz,i-1,i),平移(xO,i-1,i,yO,i-1,i,zO,i-1,i),因此机械臂末端Q点的定位误差为:

变换矩阵分别为:
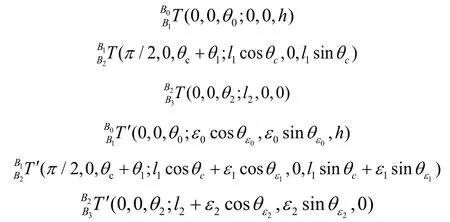
代入式(1)可得机械臂末端定位误差的数学模型:

对于给定的工作位点,θc,εi和θi给定。因此,模型变量只有θεi。由式(2)可解析求出末端x,y,z方向上定位误差的极大值。

若用空间距离d来评估定位偏差,即定义d2=εx2+εy2+εz2。有:

上式非常复杂很难通过解析方法来得到它的最大最小值。并且解析法无法求出误差的数值特征,一种通过概率的随机模拟方法可用来得到它的最值及分布。
2 概率方法得到定位误差分布
当工作位点确定时,机械臂末端定位误差的x-y-z方向最大值可由式(3)分析得到,但事实上,误差到达最大值附近区域的概率很小。因此研究机械臂末端定位误差的分布能更全面的反映随机误差特性。
由于误差模型函数很复杂,即使知道单个关节的间隙误差特性,也很难通过解析方法得到末端定位误差的数值特征和分布。运用蒙特卡洛模拟的概率抽样方法可解决这一问题。蒙特卡洛是一种建立在大数定理和中心极限定理的数学原理上的一种随机模拟方法。基本思想如下,对于一个函数Y=f(X1,X2,…,Xn),已知自变量X1,X2,…,Xn的概率分布,首先根据X1,X2,…,Xn的概率分布随机抽样出一组值x1,x2,…,xn。代入到函数式求得变量Y的一个值yi=f(x1i,x2i,…,xni)。大量重复这一过程(i=1,2,…,m)即得到变量Y的一组样本y1,y2,…,ym。当重复抽样次数m足够大,模拟得到的变量Y的样本中的数值信息就能非常精确的代表实际变量Y的分布及数值特征。
由节2可知,变量εx, εy, εz, d是θεi的函数(参数θc, θi, εi为常量),i=0,1,2。以下阐述应用蒙特卡洛模拟的方法来分析机械臂末端定位误差的流程:
1)给定工作点,代入常量参数θc,εi和θi的参数值到式(2)中的误差模型,再根据需求给定合适的抽样次数m,通常m=106能给出95%以上精确度,随着抽样次数m的增多,蒙特卡洛模拟结果更加精确。
2)确定输入变量θεi的分布类型,简单的假设是,关节间隙的误差方向角θεi可能服从0-2π的均匀分布或者其他分布如正态分布等。再根据每个输入变量的概率分布随机抽取m组样本值θεi,r,(i=0,1,2;r=1,2,…,m)。
3)依据模拟抽取的输入变量的样本值(θε0,r, θε1,r, θε2,r)和节2中的函数关系计算出变量εx,εy,εz,d的m组样本值。
4)依据输出变量的样本值得出机械臂末端定位误差的分布以及数值特征。
3 分析间隙误差方向概率分布的联合方法
影响关节间隙误差方向因素很多,甚至有些因素的本身就不确定。因此完全确定性的分析很复杂也很难得到,而完全概率的方法往往忽略了一些主要因素的影响,比如载荷,重力等臂杆受到的总外力。结合确定性和概率的方法在这一节被引入。首先结合机械臂杆受到的外力与关节间隙作用力(正压力忽略不确定因素)的力平衡得到关节间隙轴与孔的接触点,然后在这个间隙误差方向(即θεi)上建立一个正态分布来表示其他微小不确定性的因素扰动,如转动关节间隙内产生的摩擦力,碰撞,弹性变形等。
3.1 力平衡得到关节间隙内轴与孔的理想接触点
考虑机械臂所受外力与轴孔之间作用力的力平衡。暂时忽略轴孔之间一些细微不确定因素,如弹性变形,碰撞和摩擦力等,只考虑关节间隙内的正压力FN。因此正压力FN可从力平衡方程中求得。
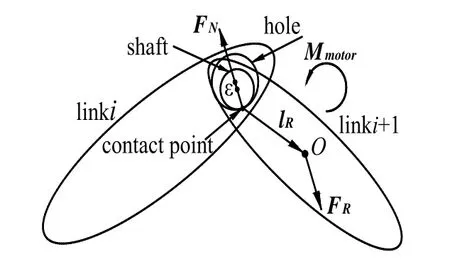
图5 关节处的受力平衡
如图5所示,可从力平衡关系得到:

不考虑轴孔间作用的其他因素时,FN方向通过接触点以及轴孔的圆心,即FN方向为关节间隙误差方向的反方向。由于臂杆所受的外合力产生的外力矩将被电机和传动机构产生的扭矩平衡,因此事实上只需考虑力的平衡即可得到正压力方向。从而得出间隙误差方向,得到的间隙误差方向角记为θb。
以上忽略了轴孔间微小摩擦力及一些其他微小不确定量,如碰撞,振动,弹性变形等。这些微小因素会在上述得到的接触点附近产生一些扰动。首先,通过上述方法得到接触点,然后可用一个误差分布来引入其他微小扰动,使分布的平均值为θb,标准差来表示引入的微小扰动。
3.2 正态分布引入扰动
影响间隙误差方向的微小随机因素很多,如摩擦力,瞬时碰撞,弹性变形,润滑油膜等等。根据概率论中的中心极限定理,当影响一个变量的随机因素很多时,该变量的分布近似于一个正态分布,因此可依据上节得到的接触点建立一个正态分布来拟合这些微小因素。记间隙误差方向分布为θε~N(θb,σ2),θb为上节由力平衡得到的间隙误差方向。σ为正态分布的标准差。σ表示微小因素的扰动。具体值可由关节精密等级和具体工况经验性得出。
4 具体数值计算
考虑如图1所示的三自由度机械臂机构为对象来阐述上述方法(蒙特卡洛模拟)来研究机械臂关节间隙对末端定位精度的影响。设定常量参数值ε0=0.5,ε1=0.4,ε2=0.3,θc=π/4,选定一个工作位置,θ0=π/5,θ1=-π/6,θ2=-π/4。选择抽样次数m为一般值106。以下先假设关节间隙误差方向θεi服从均匀分布(即完全随机)来举例阐述上述的概率方法。再代入第3节所阐述的综合思路中的正态分布。
1)假设关节间隙误差θε0,θε1,θε2为均匀分布
将θε0,θε1,θε2为均匀分布代入节3的流程可得末端定位误差εx,εy,εz和d的概率密度函数,以下概率密度函数已由“核估计”法拟合光滑。
一些数值特征可从蒙特卡洛模拟中得出。x方向的最大定位误差|εx|max=1.066,与用解析法求得的|εx|max=cosθ0(ε1+ε2)+ ε0=1.066一致,验证了蒙特卡洛模拟的精确性。同时还可得出解析法无法求出的数值特征,如标准差σx=0.257,误差分布的上95%分位点为0.861,这也意味着在95%的可信度下,x方向的定位误差的范围为0~0.861而不是0~1.066。由此能更好的评价末端定位误差值。同样可得y方向,z方向和空间距离d的数值特征。关节间隙误差方向角若服从均匀分布,由图6(c)可看出随着θ0,θ1的变动,空间距离d的数值特征保持不变,即工作位置对末端定位误差的空间距离没有影响。
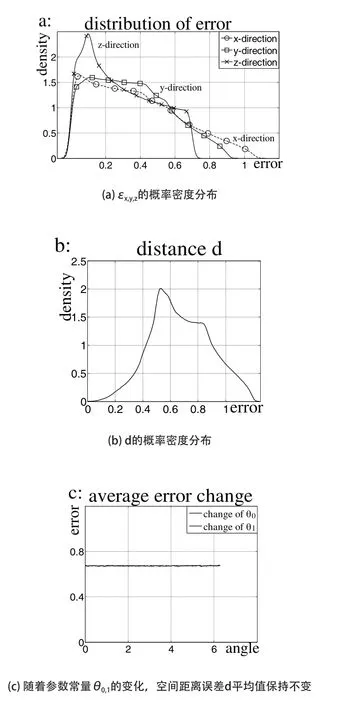
图6 概率密度函数图
2)代入上节得到的正态分布
为了阐述方便,只考虑作用在力臂上的两个主要的力,重力和运动的离心力。如图1、图2所示机构,机械臂常量参数设定不变,每个关节转动的角速度分别为ω0=0.5rad/s,ω1=4rad/s,ω2=6rad/s。臂杆2,3的质心到1和2关节的孔轴线距离分别为r2=0.3m,r3=0.2m。臂杆2和3质量分别为m2=15kg,m3=10kg。当对关节0运用力平衡来得到关节间隙误差角θb时,重力是一个向下的力,与关节轴线平行,在不考虑姿态误差时,对关节间隙误差方向没有影响,因此θε0=θ0=π/5(可由离心力方向得出)。给定所有关节的扰动项σ=3°☒。
关节1和2,离心力Fcentri=mω2r和重力G=mg。由力平衡计算间隙误差方向角可得到θε1=-63.312☒°,θε2=-80.048☒°(详细计算已省略)。因此各关节间隙误差方向分布为:

代入第2节流程,运用蒙特卡洛模拟得到末端误差的概率密度分布如图7所示。
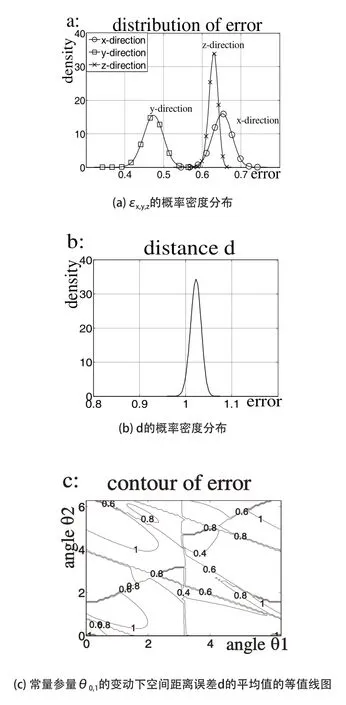
图7 末端误差的概率密度分布图
显然,这种综合思路可以得到的末端定位误差分布范围更狭窄,意味着可估计出更精确的定位误差值。相比完全随机的均匀分布时工作位点对末端定位精度没有影响,这种综合思路,参数常量θ1,θ2的值的变动会对末端的定位误差产生很大的影响,意味着通过合理规划工作位点可降低由关节间隙引起的末端定位误差。如图8(c)等值线图所示,当合理选择θ1和θ2的值时,末端定位误差d的平均值可从1降到0.4。通过这种规划可以很好地提高机械臂的重复定位精度而不需要更好的设备投入,如精确等级更高的关节。
5 结论
首先建立了存在关节间隙时一个三自由度机械臂末端定位精度的数学模型,然后运用蒙特卡洛的方法得到机械臂末端定位精度的分布和一些数值特征。运用这种方法可以得到更加全面的分布特征如误差最大值、平均值、方差和误差的上95%分位点等。一种综合的思路更好的考虑了影响关节间隙误差方向的主要因素和细小扰动因素,以一个分布来拟合表示那些不确定因素的扰动。这种方法可得出一个范围更加狭窄更加精确的末端定位误差分布并可通过合理规划工作空间以很好地提高机械臂的重复定位精度而不需要投入精确等级更高的关节。
[1] Flores, P., A parametric study on the dynamic response of planar multibody systems with multiple clearance joints[J].Nonlinear Dynamics, 61(4), 633-653(2010).
[2] Innocenti, C., Kinematic Clearance Sensitivity Analysis of Spatial Structures with Revolute Joints[J].ASME, Design Engineering Technical Conference, Paper DETC98/DAC-8679,1999.
[3] Jawale, H. P. andThorat, H. T., Investigation of Positional Error in Two Degree of Freedom Mechanism With Joint Clearance[J]. ASME, J. Mech. Rob. 2012.
[4] Lai Ming-Cheng and Chan Kuei-Yuan, Minimal deviation paths for manipulators with joint clearances[J].ASME, Mechanisms and Robotics Conference pp.V05BT08A058,2014.
[5] Megahed, S.M. and Haroun, A.F.,Study of the dynamic performance of mechanical systems with multi-clearance joints[J]. ASME, IMECE November 12-18,2010.
[6] Nicolas B., Philippe C., Stéphane C.,The kinematic sensitivity of robotic manipulators to joint clearances [J].ASME, Computers and Information in Engineering Conference,2010.
[7] Sel☒uk and Erkaya, Trajectory optimization of a walking mechanism having revolute joints with clearance using anfis approach [J], Nonlinear Dynamics,71(1-2):75-91,2013.
[8] Sony, C., Paulo, F. H. and Hamid, M. L., Computational and Experimental analysis of mechanical systems with revolute clearance joints [J], ASME, IDETC/CIE 2013 August 4-7,2013.
[9] Stefano, V. and Vincenzo, P. C., A New Technique for Clearance Influence Analysis in Spatial Mechanisms[J].ASME J.Mech. Rob. Montreal, Quebec, Canada,2002.
[10] Ting, K. L., Zhu, J. M. and Watkins, D.,The effects of joint clearance on position and orientation deviation of linkages and manipulators [J], Mech. Mach. Theory, 35(3):391-401,2000.
[11] 张志雄,江志新,杨拥民,等.关节对中误差对机械臂末端定位精度影响[J].国防科技大学学报,2014,06:185-190.
Study on kinematic positioning error of manipulator caused by joint clearance
XU Chang-yu1, DONG Hui-min1, WANG Cheng-gang2, TIAN Zhi-tao2
TP242.2
:A
:1009-0134(2017)05-0044-05
2017-03-10
辽宁省科技创新重大专项(2015106007);国家科技重大专项(2013ZX04003041-6)
许昌瑀(1994 -),男,湖南衡阳人,本科,研究方向为机器人。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
小资CHIC!ELEGANCE(2022年2期)2022-01-11 12:32:55
航空发动机(2020年3期)2020-07-24 09:03:18
数学物理学报(2020年2期)2020-06-02 11:28:48
小哥白尼(趣味科学)(2020年6期)2020-05-22 06:43:14
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
统计与决策(2017年2期)2017-03-20 15:25:27
广西电力(2016年4期)2016-07-10 10:23:38
通信电源技术(2016年1期)2016-04-16 04:57:39
