
基于ANFIS的小重叠碰撞安全气囊算法研究∗
2017-06-06 11:55白中浩张林伟白芳华颜长征覃祯员张永春
汽车工程 2017年5期
白中浩,张林伟,白芳华,颜长征,覃祯员,张永春
(1.湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082;2.重庆车辆检测研究院,国家客车质量监督检验中心,重庆 401122)
基于ANFIS的小重叠碰撞安全气囊算法研究∗
白中浩1,张林伟1,白芳华2,颜长征2,覃祯员2,张永春2
(1.湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082;2.重庆车辆检测研究院,国家客车质量监督检验中心,重庆 401122)
为提高小重叠碰撞事故中安全气囊对乘员的保护作用,分析了小重叠碰撞事故类型并获得识别小重叠碰撞的3个特征参数:速度变化量、加速度曲线长度比值和汽车主要受力方向。基于特征参数变量,结合自适应神经模糊推理系统开发了新型二级模糊安全气囊控制算法,来识别小重叠碰撞类型,并根据碰撞类型展开安全气囊。通过训练合适的模糊隶属度函数和模糊规则,该算法的性能得以提高。最后,经台车试验对新型安全气囊算法进行了验证。结果表明:在发生小重叠碰撞事故时,基于ANFIS的新型安全气囊控制算法能准确识别小重叠碰撞类型,及时展开前安全气囊和侧气帘,改善了其对乘员的保护作用。
乘员保护;小重叠碰撞;自适应神经模糊推理系统;安全气囊算法
前言
安全气囊是乘员在碰撞事故中重要的保护装置,根据美国统计报告,当汽车发生正面碰撞时,单独使用安全气囊可降低23%的重伤率,同时使用安全带和安全气囊可减少50%的重伤率[1-2]。然而,现实碰撞事故较为复杂,包括斜碰撞、偏置碰撞、小____重叠碰撞和柱碰撞等多种类型,如果这些事故被安全气囊算法误判为100%正面碰撞或其他碰撞类型,则会低估或高估碰撞的严重性,对乘员起不到最佳保护作用,甚至对小体型乘员造成致命伤害。
近年来,很多学者致力于开发能识别碰撞类型的安全气囊算法。文献[3]中用速度变化量Δv和加速度长度两个特征参数来识别柱碰撞、斜碰撞、偏置碰撞和正面100%重叠碰撞,该算法的识别变量较少,识别结果的可靠性较差。文献[4]和文献[5]中结合雷达和多种传感器信息,提出预测碰撞形式的预碰撞算法,同时结合速度变化量和加速度绝对值两个特征参数预测最终碰撞类型,但多种传感器的使用和数据融合技术,大大增加了汽车成本。文献[6]~文献[9]中用主要受力方向(principal direction of force,PDOF)判断汽车侧面碰撞时碰撞接触侧和碰撞角度,但没有考虑多种正面碰撞类型的识别,从而识别的碰撞类型较为局限。随着神经网络和模糊推理的广泛应用[10-12],文献[11]中用汽车位移和加加速度等特征变量开发了基于自适应神经模糊推理系统(adaptive network based fuzzy inference system,ANFIS)的判断碰撞严重程度的安全气囊算法,但没有对碰撞类型进行识别。小重叠碰撞是正面碰撞的一种,因其比较常见且对乘员有致命损伤而越来越受到关注[12-13]。小重叠碰撞中正面冲击力完全由纵梁外侧的结构承受,车身侵入量极大,乘员头部因发生斜向位移而严重受伤[13]。小重叠碰撞兼有小角度碰撞和正面碰撞的特点,传统安全气囊算法对该种碰撞类型的识别鲁棒性不高。另外,由于小重叠碰撞过程中乘员头部发生斜向位移,在最佳时间同时展开前排乘员气囊和侧气帘,才能对乘员起到最佳的保护效果。
本文中在前人学者研究的基础上,分析小重叠碰撞数据得到判别该碰撞类型的Δv,PDOF和加速度曲线长度比值(acceleration curve length ratio,ACLR)3个特征参数,结合Δv抗干扰能力强、ACLR灵敏性高和PDOF可合理识别汽车碰撞接触侧的优点,设计了一种基于ANFIS的二级模糊安全气囊算法,以期在发生小重叠碰撞事故时,安全气囊控制单元识别出该碰撞类型并在最佳时间确定是否同时展开前气囊和侧气帘,以达到乘员的最佳保护效果。
1 小重叠碰撞特征参数研究
采用美国国家碰撞分析中心建立的某款整车有限元模型,参照IIHS 25%重叠偏置碰撞评价体系相关要求建立小重叠碰撞有限元模型,进行仿真试验,该整车模型已经通过有效性验证[14]。
1.1 速度变化量Δv
目前,安全气囊参数运用较多的是速度变化量Δv,其优点在于抗干扰能力强,可很好地反映碰撞能量变化,但是发生小重叠碰撞事故时,正面冲击力完全由纵梁外侧的结构承受,在相同的冲击力情况下,小重叠碰撞速度降低较慢,Δv较小。因此在小重叠碰撞中不能单独运用Δv作为识别碰撞类型特征参数,需要引入其他变量。
1.2 加速度曲线长度比值ACLR
在小重叠碰撞中,当壁障碰撞到车轮、悬架系统、前挡板和仪表台等较硬实体时,减速度会迅速增大,当再次碰到其他实体时会再次增加,因此小重叠碰撞的加速度曲线有更多的震荡,长度更长。
发生小重叠碰撞时,车辆只有一侧受力,因此左右加速度曲线长度差异较大。对比分析仿真试验数据,采用安装在前车灯架处的前置传感器采集的车身右侧与左侧x向加速度曲线长度比值ACLR作为安全气囊算法的第2个特征变量,加速度曲线长度La和ACLR计算公式为
式中:LaRx为车辆右侧x向加速度曲线长度;LaLx为车辆左侧x向加速度曲线长度。
计算得到ACLR曲线如图1和图2所示。结果表明:正面100%重叠碰撞的ACLR范围为0.70~1.3,小重叠碰撞的比值范围为0~0.40。正面100%重叠碰撞中,车辆两侧的x向冲击力相似,加速度值相差不大,因此ACLR值在1左右浮动。小重叠碰撞只有一侧受到冲击,该侧的加速度值较未受冲击的一侧大,因此ACLR值在碰撞前期在0.15左右浮动,后期由于受到汽车侧移等因素影响,碰撞侧ax相对减小,ACLR增大,但始终在0.5以内。

图1 正面100%重叠碰撞加速度曲线长度比值

图2 小重叠碰撞加速度曲线长度比值
1.3 主要受力方向PDOF

PDOF是汽车合成碰撞力的方向,在很多事故中可合理地确定汽车碰撞的接触侧。在给定时间点,分别计算汽车纵向和横向速度变化量Δvx和Δvy,合成速度变化量的方向即为PDOF[15]。传统PDOF算法用式(3)计算。PDOF角度范围为180°~-180°,代表前、后、左、右4种碰撞类型。传统算法计算得到的PDOF是瞬时值。研究表明,当加速度曲线有一个主导方向时,Δv在另外一个方向轴上的轻微变化都会对PDOF产生影响。因此传统的PDOF算法在计算正面100%重叠碰撞时,PDOF值相对稳定,在识别其他正面碰撞类型时有较大误差[16],不适用于小重叠碰撞。本文中采用位移变化量Δs算法来计算PDOF,见式(4),该算法运用完整的Δv时间曲线代替传统算法中运用的两轴上最大Δv,因此对上述现象不敏感,避免了较大误差的产生。

为确保采集加速度数据的可靠性,采用不直接接触碰撞的安全气囊中央传感器采集的加速度信号计算PDOF,计算所得PDOF曲线如图3和图4所示。结果表明:在正面100%重叠碰撞下,PDOF随速度的升高而先增后减,总体范围为0.5°~1.5°,这也说明正面100%重叠碰撞的PDOF角度接近于0°,验证了算法的准确性。小重叠碰撞中,PDOF随着初速度的升高而增大,角度范围为8°~18°。综上所述,小重叠碰撞与正面100%重叠碰撞的PDOF角度范围存在较大差异,因此将PDOF作为识别小重叠碰撞的参数指标。

图3 正面100%重叠碰撞PDOF角度值

图4 小重叠碰撞PDOF角度值
2 安全气囊算法的设计
小重叠碰撞同时拥有正面100%重叠碰撞、斜碰撞和偏置碰撞的特点,识别碰撞类型时没有清楚的界限,存在模糊区域。ANFIS完美地结合了模糊推理系统在评估模糊复杂对象时的广泛适用能力和人工神经网络在处理推理等问题时的自主学习能力。本文中提出一种基于ANFIS的两级模糊算法,以期在发生小重叠碰撞事故时,安全气囊控制单元能识别出该碰撞类型并在最佳时间确定是否同时展开前气囊和侧气帘,达到乘员的最佳保护。
2.1 两级模糊算法设计
为能精确识别小重叠碰撞类型,新型安全气囊碰撞类型识别算法使用两级模糊算法,流程如图5所示。

图5 两级模糊算法流程图
该两级模糊算法采用3个输入信号:Δv,PDOF和ACLR。当加速度信号超过预定阈值,则开始第一阶段,计算0~10ms内的Δv,如果Δv超过阈值则识别为正面碰撞并立即根据相应展开阈值展开安全气囊,若不是则进入第二阶段,即根据输入变量为PDOF和ACLR的ANFIS系统识别碰撞类型。
2.2 ANFIS设计与训练
ANFIS结构采用T-S型模糊推理规则,共有6层节点,两个输入(PDOF,ACLR)一个输出(碰撞类型),各层节点数为:2-6-9-9-9-1,同一层的每个节点具有相似的功能。
(1)ANFIS输入输出层节点
选取的PDOF和ACLR两种特征参数作为模糊神经网络的输入节点。输出层描述的是碰撞类型,将网络的输出节点数设为1,期望输出为小重叠碰撞记为“1”,正面碰撞类型为“0”,在输出值基础上,利用四舍五入的方法确定分类结果。
(2)ANFIS输入变量论域
ANFIS的输入变量的论域不同,为方便计算需将2个输入变量的论域根据式(5)进行变换,将实际论域变换为[0,1],并将变换后的值作为ANFIS的输入。

式中:x0max和x0min分别为PDOF和ACLR特征变量的最大、最小值;x为论域变换后的值。
(3)隶属度函数
分别用L(大)、M(中)、S(小)3个语言变量来表示各个特征量的模糊空间,即每个输入变量都有3个模糊化神经元。
分析大量的碰撞事故类型,又因高斯型隶属函数曲线较平滑,系统准确简洁,确定选取高斯型隶属函数为

式中:c表示隶属函数的中心;δ决定隶属函数的宽度。
ANFIS有9条模糊推理规则,如表1所示。通过对两种碰撞事故类型的分析,选择灵敏度较高的ACLR为主影响变量。其中,规则1表示如果PDOF和ACLR都较大,则碰撞类型为正面碰撞。
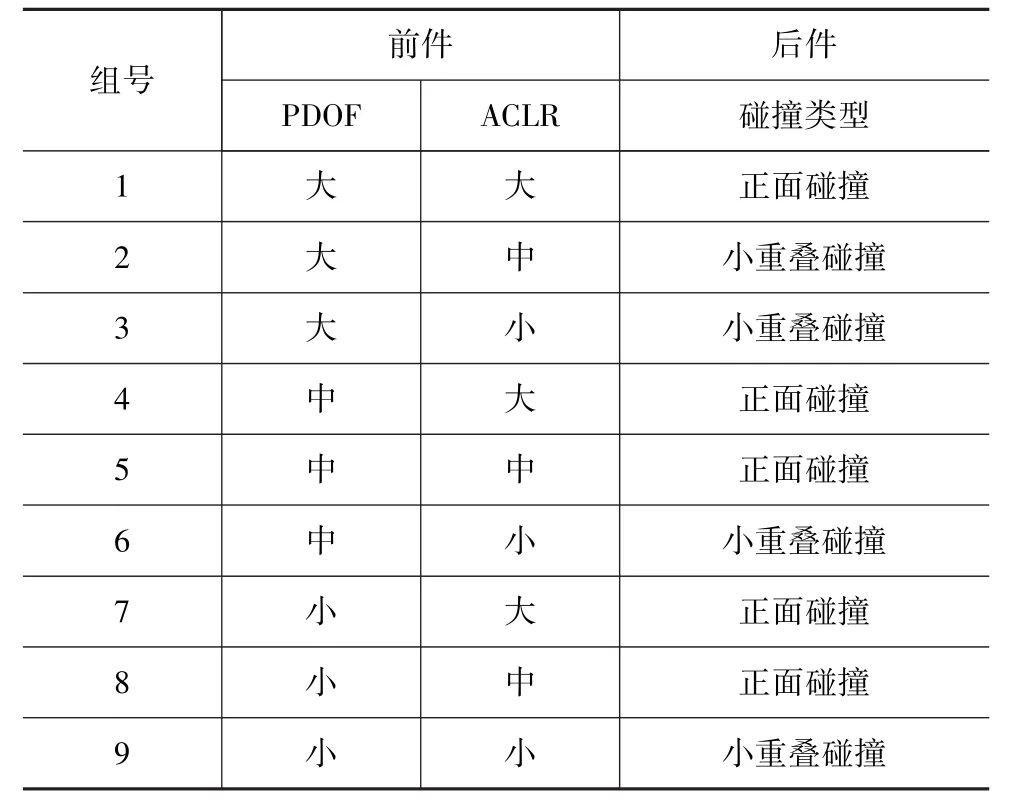
表1 模糊规则组合表
利用MATLAB的模糊工具箱ANFIS仿真实现命令Anfis训练网络模型,选取正面碰撞和小重叠碰撞20,30,40,50和60km/h 5组速度下共20个车辆仿真碰撞数据和碰撞类型作为输入-输出的训练数据trnData,其每一行代表一个模拟目标系统所需的输入-输出对。ANFIS采用误差反传与最小二乘相结合的混合算法训练相应参数,设置训练目标误差为0.001,步长为100,经过19步训练,训练结果误差为0.000 923 53,达到了目标误差要求。
3 仿真结果对比分析
安全气囊能否及时展开是安全气囊算法设计的关键之一,为对比基于PDOF和ACLR两种特征参数的ANFIS自适应安全气囊算法的鲁棒性和实时性,对比分析了单独使用两个特征参数对自适应安全气囊算法识别碰撞类型和识别时间的影响,采取了3种试验方案:
(1)输入特征参数为PDOF和ACLR 2种;
(2)输入特征参数为PDOF;
(3)输入特征参数为ACLR。
每次试验都载入两种碰撞类型5个共10组测试样本进行测试,ANFIS的仿真识别结果见表2。由表2可知,基于PDOF和ACLR两种特征参数的ANFIS控制实现了正确识别碰撞类型,而且该种ANFIS控制系统识别碰撞类型的时间较早。输入变量为PDOF时系统的识别时间最晚,输入变量为ACLR时较早,这主要由于采集PDOF数据的中央传感器比前置传感器较晚接触碰撞和采集碰撞信息的缘故,输入变量为PDOF和ACLR两个特征参数时较好地结合了两个输入变量的优点,识别时间较早。

表2 ANFIS仿真识别结果
当发生60km/h正面碰撞类型时,△v在10ms之前超过阈值,碰撞类型在第一阶段识别。ANFIS输入变量为PDOF和ACLR两种特征参数时,50km/ h正面碰撞类型在第二阶段识别,识别时间是13ms,两种碰撞符合在10-20ms内触发安全气囊的要求[17];30与40km/h正面碰撞的识别是在第二阶段完成,识别时间分别是15与16ms,较40-60ms内触发安全气囊的要求时间提前[18],小重叠碰撞的识别均是在第二阶段完成,识别时间分别是21,18,17,15和12ms,符合在规定时间内触发安全气囊的要求。
基于单个输入变量PDOF的ANFIS控制系统,将50km/h速度下的小重叠碰撞错误地识别为正面碰撞,且识别时间较长,这主要是由于PDOF曲线前期发生震荡的缘故。另外,基于单个输入变量ACLR的ANFIS控制系统将20km/h的正面碰撞错误识别为小重叠碰撞,这主要因为前置传感器的加速度数据可靠性差,鲁棒性不高。
4 试验验证
为验证开发的新型安全气囊控制器在现实碰撞中的准确性,进行了验证试验。考虑到本算法是基于碰撞加速度信号开发的,因此采用可模拟不同碰撞加速度曲线的台车代替实车进行验证试验[18]。所用台车质量为1 660kg,碰撞加速度曲线通过仿真得到的吸能筒组合,共进行了12与35km/h的正面100%重叠碰撞和27与64km/h的小重叠碰撞4组试验。64km/h小重叠碰撞台车试验后假人和气囊起爆状态如图6所示。
台车碰撞中安全气囊的展开时间可由控制器的输出电压信息确定,当发生64km/h小重叠碰撞时,该智能安全气囊控制器起爆时刻如图7所示。由图7可知,安全气囊展开时间为碰撞发生后的32ms。根据高速摄像数据和127mm-30ms准则分析,确定安全气囊的最佳展开时间为34ms。经过对比可知安全气囊的最佳点火时间与实际点火时间相差2ms,点火误差为5.8%,而35km/h正面100%重叠碰撞点火时间为22ms,最佳点火时间为23ms,点火误差为4.3%。两次起爆试验的点火误差均在允许误差范围之内。在低速碰撞情况下安全气囊均未起爆,符合预期要求。因此,通过台车试验,验证了提出的安全气囊控制算法的有效性。

图6 台车碰撞后状态图

图7 智能安全气囊控制器起爆时刻图
5 结论
提出一种基于ANFIS的二级模糊安全气囊控制算法,能够正确识别小重叠碰撞事故类型和乘员类型坐姿,并在最佳时间展开前排乘员气囊和侧气帘,对乘员起到最佳保护。
(1)分析小重叠和正面碰撞仿真模型,得到识别小重叠碰撞类型的3个特征参数:速度变化量△v、加速度曲线长度比值ACLR和汽车主要受力方向PDOF。
(2)在ANFIS的相关理论基础上,基于小重叠碰撞的3个特征参数,设计了二级模糊碰撞类型识别算法。
(3)针对开发的基于ANFIS系统的二级模糊碰撞类型识别算法,对比分析了单个和多个特征参数为输入变量的控制算法在识别碰撞类型方面的优缺点,初步验证了提出的基于ANFIS系统的二级模糊安全气囊碰撞类型识别算法的实时性。
(4)为更好地验证所开发安全气囊算法的有效性,进行了4次台车验证试验。在4组验证试验过程中,安全气囊均能按照预期准确识别碰撞类型和起爆条件,起爆误差分别为5.8%和4.3%,均在允许误差范围内,给乘员提供了最佳保护,从而很好地验证了该安全气囊算法的有效性和可靠性。
新型安全气囊控制算法的研究更符合交通事故的现状,提高了小重叠碰撞中乘员的安全性,有利于降低交通事故乘员损伤,具有明显的社会价值。后续研究可结合多种碰撞类型如斜碰撞、柱碰撞等进行研究,使其适用性更广。
[1] United States General Accounting Office.Vehicle safety technologies,challenges,and research and development expenditures for advanced air bags,GAO-01-596[R].Report to the Chairman and Ranking Minority Member,Committee on Commerce,Science,and Transportation,United States:U.S.Senate,June 2001.
[2] 葛如海,蓝善斌,陈晓东,等.安全气囊对离位乘员损伤影响的仿真研究[J].汽车工程,2007,29(9):766-770.
[3] PARK TW,JEONGH Y,PARK SW.A crash severity algorithm for all frontal crashmodes using compensation factors[J].Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2006,220(5):531-541.
[4] CHO K,CHOISB,LEEH.Design of an airbag deployment algorithm based on precrash information[J].IEEE Transactions on Vehicular Technology,2011,60(4):1438-1452.
[5] CHO K,CHOIS B,SHIN K,et al.A pre-crash discrimination system for an airbag deployment algorithm[C].American Control Conference.Baltimore,2010,6949-6954.
[6] CHO K,CHOIS B,WEE S,et al.Design of an airbag deployment algorithm using a radar sensor[C].Proc.IFAC Symp.Adv. Automot.Control.2010,47-52.
[7] KUSANO K D,GABLER H C.Automated crash notification:evaluation of in-vehicle principal direction of force estimations[J]. Transportation Research Part C:Emerging Technologies,2013,32:116-128.
[8] GEISLER S,MICHELINIM.A study of crash rates for vehicles with advanced crash avoidance features[C].SAE Paper2011-01-0587.
[9] NIEHOFF P,GABLER H C,BROPHY J,et al.Evaluation of event data recorders in full systems crash tests[C].Proceedings of the 19th International Conference on the Enhanced Safety of Vehicles,2005.
[10] 曹立波,张萍,颜凌波,等.在车对车碰撞条件下轿车斜角碰撞及小重叠碰撞的驾驶员损伤研究[J].汽车工程,2016,38(2):174-180.
[11] MON Y J.Airbag controller designed by adaptive-network-based fuzzy inference system(ANFIS)[J].Fuzzy Sets and Systems,2007,158(24):2706-2714.
[12] SHERWOOD C P,NOLAN JM,ZUBY D S.Characteristics of small overlap crashes[C].Proc 21th Int'l Tech Confon Enhanced Safety of Vehicles,Germany,2009:9-13.
[13] 陈可明,胡丽娟,胡晏殊.国内某车型小偏置正面碰撞的全面评估[J].汽车安全与节能学报,2013,4(1):27-34.
[14] FE Model of Ford Taurus Report of Test.National crash analysis center[R].The GeorgeWashington University,2001:2-18.
[15] KUSANO K D,GABLER H C.Automated crash notification:evaluation of in-vehicle principal direction of force estimations[J]. Transportation Research Part C:Emerging Technologies,2013, 32:116-128.
[16] 陈望,干金鹏,史雪林,等.车辆紧急呼救系统中碰撞类型识别的新算法[J].汽车工程学报,2015,5(3):215-221.
[17] MON Y J.Airbag controller designed by adaptive-network-based fuzzy inference system[J].Fuzzy Sets and Systems,2007,158 (24):2706-2714.
[18] BEEMAN SM,KEMPER A R,MADIGAN M L,et al.Kinetic and kinematic responses of postmortem human surrogates and the hybrid IIIATD in high-speedfrontal sled tests[J].Accident Analysis&Prevention,2013,55:34-47.
A Study on Airbag Algorithm for Small-overlap Crash Based on ANFIS
Bai Zhonghao1,Zhang Linwei1,Bai Fanghua2,Yan Changzheng2,Qin Zhenyuan2&Zhang Yongchun2
1.Hunan University,State Key Laboratory ofAdvanced Design and Manufacturing for Vehicle Body,Changsha 410082;2.Chongqing Vehicle Test&Research Institute National Quality Control&Inspection Center for Buses,Chongqing 401122
In order to enhance the protection effects of safety airbag for occupant in small-overlap crash,the accident types of small-overlap crash are analyzed with three characteristic parameters obtained for identifying small-overlap crash,i.e.speed change,acceleration curve length ratio and the principal direction of force.Based on characteristic parameters,combined with adaptive neural fuzzy inference system(ANFIS),a novel two stage fuzzy airbag control algorithm is developed to identify the type of small-overlap crash,accordingwhich the safety airbag is deployed.The performance of the algorithm can be enhanced by training appropriate fuzzymembership functions and fuzzy rules.Finally,the new airbag algorithm is validated by sled test.The results show that in the event of small-overlap crashes,the new airbag algorithm based on ANFIS can accurately identify the type of small-overlap crash and timely deploy front airbag and side air-curtain,improving their protection effects for occupant.
occupant protection;small-overlap crash;ANFIS;airbag algorithm
10.19562/j.chinasae.qcgc.2017.05.006
∗国家自然科学基金(51475153)资助。
原稿收到日期为2016年5月25日,修改稿收到日期为2016年7月13日。
白芳华,硕士,E-mail:baifanghua@cmhk.com。
猜你喜欢
当代水产(2022年6期)2022-06-29
舰船科学技术(2022年10期)2022-06-17
北京汽车(2021年3期)2021-07-17
汽车工程(2021年12期)2021-03-08
北京汽车(2018年6期)2019-01-04
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
汽车电器(2018年1期)2018-06-05
电子技术与软件工程(2016年22期)2016-12-26
