
第15届田径世锦赛男子三级跳远冠军泰勒的助跑特征研究
2017-06-05 15:18郑富强苑廷刚李爱东王国杰郭元奇
中国体育科技 2017年3期
郑富强,苑廷刚,李爱东,王国杰,戴 勇,郭元奇
第15届田径世锦赛男子三级跳远冠军泰勒的助跑特征研究
郑富强1,2,苑廷刚2,李爱东2,王国杰3,戴 勇1,郭元奇4
以二维录像分析、专家访谈、数理统计等研究方法,对平跳型三级跳远助跑技术进行研究,区分运动技术类型,揭示助跑技术的节奏特点及规律,深化对项目本质与特征认识,为提高训练的科学化水平提供有益借鉴。研究结果:1)倒7~倒1步相邻步长变化幅度分别为1 cm、5 cm、2 cm、22 cm、3 cm、24 cm;倒4~倒1步的相邻单步之间用时差异非常显著(P<0.01)。 2)助跑倒7~倒1步平均速度11.02 m/s,倒2步速度最慢(10.40 m/s),倒1步达速度峰值(11.94 m/s);倒2步重心着地速度是唯一与运动成绩高度相关且变异系数相对较大的参量(r=0.955,P<0.01)。3)助跑倒2~倒1步着地和离地角度变化区间分别为80.33~83.83、59.67~64;倒2步腾起角度2.38,倒1步则基本保持水平(-0.16)。4) 6次试跳踏板均值17 cm,趾板距离与倒2步着地速度(r=-0.855,P<0.05)、步长(r=0.826,P<0.05)显著相关。研究结论:1)助跑倒4步是平跳型三级跳远节奏调整的临界点;倒3~2步参数变异性最大,是助跑节奏控制的重点与难点。2)助跑倒3~倒1步“ 中-长-短”时间节奏与“ 中-大-小”步幅节奏相搭配是创造优异成绩的理想模式。3)稳定倒3~倒1步速度节奏、保持倒2步速度的绝对优势并提高倒1步速度的利用率是提高助跑速度实效性的关键环节。4)助跑支撑阶段的缓冲动作实际上是膝、踝关节的共同作用,蹬伸动作是以踝关节蹬伸为主导,膝关节则保持“屈蹬”方式。“快步频、大着地角、小离地角、屈蹬、低腾空”是倒2~1步基本技术特点。5) 80~85的 着地角度与56~61的离地角度相搭配利于减少助跑制动阻力、保持水平速度,但能否对比赛成绩起决定性作用还要取决于运动员的蹬伸与摆动能力。6)倒2步步长和速度是踏板效果的重要影响因素,提高踏板准确性有助于提高竞技水平。
平跳型三级跳远;助跑节奏;技术分析;田径世锦赛;泰勒
前 言
男子三级跳远项目于1896年被列为奥运会正式比赛项目,经120年的发展逐渐演变为“高跳型”“平跳型”“跳跃型”3种代表性技术[8~10]。三级跳远项目的动作结构由助跑和3次跳跃(单足跳、跨步跳、跳跃)所构成,其中每一个跳跃环节均包含起跳、腾空、落地3个结构单元。助跑是三级跳远最大可控速度的重要获得阶段,是节奏(速度、时间、步幅等)变化最为敏感的阶段。
1995年,英国运动员爱德华兹在第5届田径世锦赛上凭借“跳跃型”技术以18.29 m的惊人成绩创造了男子三级跳远世界纪录[1,5,6];在超风速的条件下“平跳型”技术曾一度助其将竞技水平提升至18.45 m[3]。2015年,第15届田径世锦赛,美国运动员泰勒以稳定的“平跳型”技术跳出了该项目近20年最好成绩(18.21 m),距打破世界纪录仅有8 cm之差;如果将踏板损失计算在内,泰勒实际距离已经达到18.325 m。2016年第31届奥运会上,中国“高跳型”选手董斌以17.58 m的成绩摘得1枚铜牌,书写了中国男子三级跳远项目的奥运会历史。深化不同类型动作技术本质与特征的认识对推动中国三级跳远项目的可持续发展具有重要战略意义。
1 研究对象与方法
1.1 研究对象
本文以第15届田径世锦赛男子三级跳远冠军美国运动员泰勒为研究对象,以决赛6次试跳的助跑技术为主要研究内容,运动员基本资料(表1)及试跳成绩(表2)如下:

表1 运动员基本资料Table 1 Basic Characteristics of the Studied Athlete
1.2 研究方法
1.2.1 文献资料调研
本文利用中国知网、EBSCO、施普林格电子期刊全文数据库等资源,以“三级跳远”“运动技术”等为关键词检索了SCI、CSSCI等相关文献,通过对其中30余篇重点文章认真研读,了解并掌握该项目相关研究的现状、运动技术特征及发展趋势。
1.2.2 专家访谈
多年以来,中国国家田径队奥运科研攻关与科技服务团队成员一直坚守在训练一线,在运动训练过程及技术交流会上就三级跳远运动员的技术与训练问题与国内、外专家进行了广泛交流,在运动视频多重处理技术上得到了国家体育总局体育科学研究所专家们的技术支持。
1.2.3 现场拍摄
在本届世锦赛男子三级跳远决赛的视频采集前,田径(跳跃)奥运科研攻关与科技保障团队将资格赛作为预实验进行现场拍摄,达到了预期实验目的。决赛期间在国家体育场(鸟巢)的看台架设了6部摄像机对三级跳远比赛现场进行全程定点、定焦及扫描录像,机高1.2 m,拍摄频率50 Hz,主光轴与助跑道垂直(图1),比赛结束后,课题组成员对助跑场地进行了全程二维标定,其中,X轴为水平方向(助跑方向),Y轴为竖直方向。
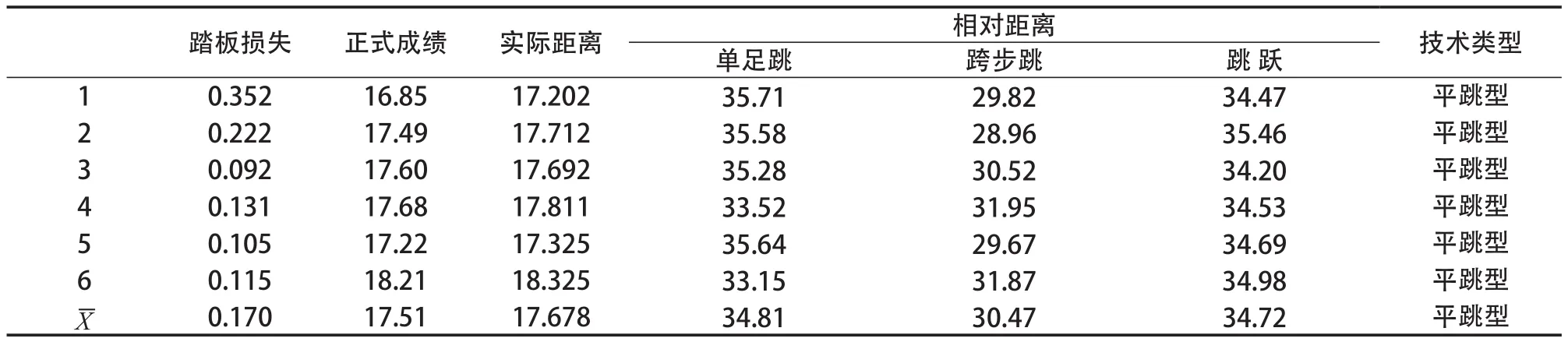
表2 泰勒6次试跳的趾板距离、正式成绩、实际距离 (m) 及相对距离 (%)Table 2 Toe-to-board,Official,Effective and Relative Phase Distances for the Analysed Jumps

图1 比赛现场摄像机位置及视角图示Figure 1 The Placement and Filming Views of the Cameras
1.2.4 录像分析
本文视频图像处理在国家体育总局体育科学研究所运动技术诊断实验室完成,视频图像编辑主要采用Dartf i shTeam Pro版软件,视频图像解析在Peak Motus 9.0二维分析系统下完成。身体重心采用松井秀治人体模型进行合成,数据输出采用低通滤波平滑,截断频率为6 Hz。
1.2.5 统计分析
为进一步探索有效试跳运动技术参数的差异性及与运动成绩的相关性进而达到对技术特征与规律进行总结归纳的目的,本文采用SPSS 19.0软件对解析数据进行了统计学分析。
2 结果与分析
获得最佳速度及良好视觉控制是三级跳远助跑阶段的基本任务要求,助跑根本目的是优化速度并为准确起跳创造有利条件;三级跳远助跑技术特征主要表现在速度节奏调控和踏板效果(准确性、稳定性)等方面。
2.1 速度节奏特征
2.1.1 步幅特征
优秀三级跳远运动员助跑步数一般18~24步,距离35~45 m。本研究对象以“行进间”启动方式为开始,采用“走3步+垫步跳+18步加速跑”的基本动作模式,全程助跑合计22步。现有文献中,对助跑步长的研究多集中于最后两步,研究结果得出:优秀运动员步幅一般有“大-小”和“小-大”两种基本动作模式[5,7],其中,前者使用的频率相对较高。在6次试跳过程中,泰勒助跑倒2~倒1步的步幅均表现出“大-小”模式且动作结构稳定,体现了积极上板的节奏特征。虽然倒2步的研究确实能够反映一定的步长变化现象,但并不足以充分揭示运动员助跑过程步幅调控特征。为准确把握调整时机,课题组通过本次世锦赛进行了相关验证(图2)。

图2 泰勒助跑倒7~倒3步全景图Figure 2 The Panorama in the Last 7~3 Strides of the Approach
通过对助跑后半程17.26 m处(板前7~1步)数据统计(表3),该运动员倒7~倒6步、倒5~倒4步、倒3~倒2步步长变化幅度分别为1 cm、2 cm、3 cm,说明助跑板前7~倒1步步幅出现了3个稳定调整单元,倒4~倒3步、倒2~倒1步的衔接调整最深,变化幅度分别为22 cm、24 cm。助跑板前7~1步实际是在视觉搜索的基础上通过步幅调控而形成的“双节奏”结构,是稳定(倒7~倒4步)与非稳定(倒3~倒1步)运动模式的综合体现。图3清晰的显示:倒4步是该运动员步幅调整的临界点,倒3~倒1步总体表现为“中-大-小”的步幅节奏变化模式。从6次试跳实际距离的角度出发,倒3~倒2步的稳定过渡(1~3 cm)以及倒2~倒1步步幅基本保持24~29 cm的变化幅度对取得优异运动成绩有着积极意义。
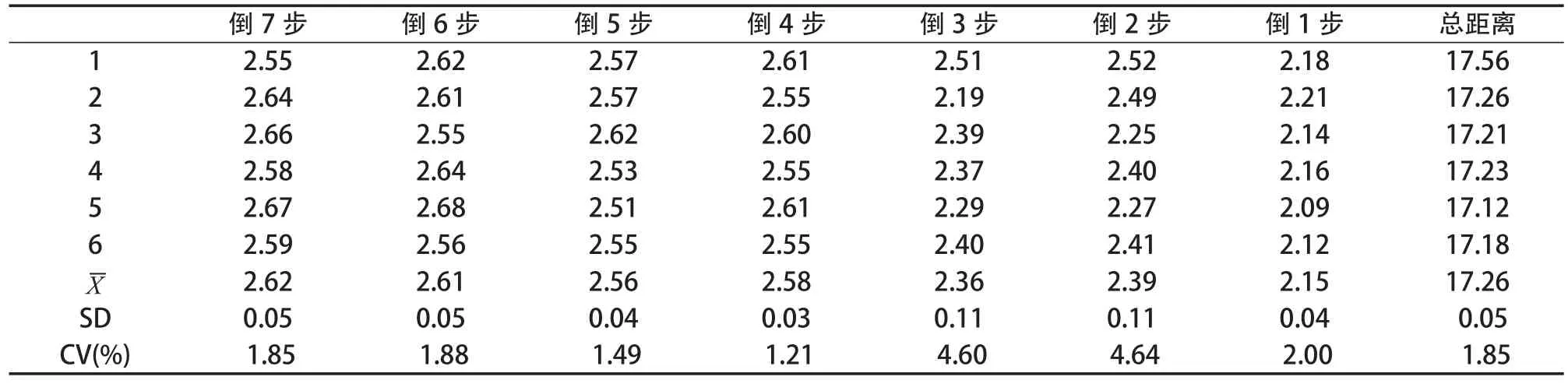
表3 泰勒助跑板前7~1步步幅 (m)Table 3 Strides Length in the Last 7~1 Strides of the Approach
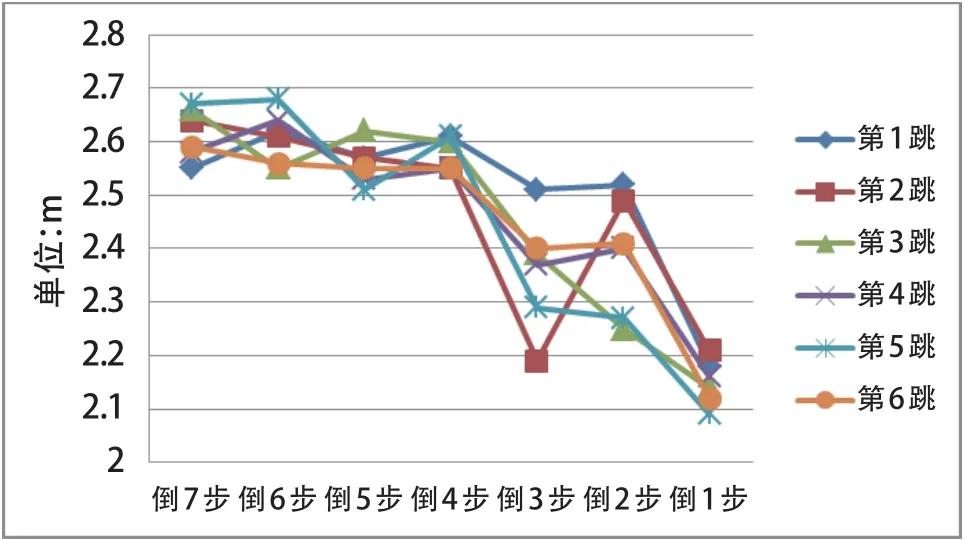
图3 泰勒助跑板前7~1步步幅变化趋势Figure 3 The Changing Trend of the Stride Length in the Last 7~1 Strides of the Approach
在一个完整的周期性运动中,运动员步幅的变化在1~3 cm之内,这种相对稳定且几乎等长的规律性变化认为是运动员下肢柔韧性及力量均衡的良好表现;板前7~倒1步步幅的节律性变化对第6次试跳(18.21m)优异成绩的创造起到了关键作用;由于第1次试跳的倒2~倒1步以及第2次试跳的倒3~倒2步步幅变化过大导致倒3~倒1步动作结构不稳定因而竞技表现并不理想,说明即使是世界最优秀的运动员也应该高度重视前3次试跳步幅的稳定性。
为进一步验证助跑倒7~倒1步步幅、正式成绩、实际距离之间的相关关系,相关性统计检验结果显示:正式成绩与实际距离呈显著性相关关系(r=0.982,P<0.01),但步幅之间、步幅与正式成绩之间并不具有相关性。均值检验结果得出:倒4~倒3步步幅及倒2~倒1步步幅差异非常显著(P<0.01)。根据上述统计结果,我们得出如下结论:三级跳远助跑步幅的调整能够为起跳创造良好条件,步幅调控方式及时机的整体把握等对运动成绩的影响较单一步幅的大小变化更为深远。
2.1.2 时间特征
跑步中的1个周期是由1个复步(两个单步)构成[2],如果以一个单步为结构单元,助跑板前7~倒1步的每个单元时间在0.18~0.24 s区间(表4)。倒7~倒4步每个结构单元的时间保持在0.24 s,与步幅节奏变化趋势相类似;倒3~倒1步用时“中-长-短”(图4)变化与“中-大-小”的步幅节奏模式相吻合。统计结果显示:助跑倒4~倒3步、倒3~倒2步、倒2~倒1步时间(P<0.01)及倒4与倒2步时间(P<0.05)均在不同水平上表现出显著性差异。正是由于倒4~倒3步、倒2~倒1步步幅以及时间本身的差异性,因此出现了步幅“大-小”变化与时间“长-短”变化相匹配模式。虽然倒3~倒2步步幅没有明显变化,但用时差异却非常显著,步幅的“小-大”变化与时间的“短-长”变化相对应。
综合均值表现,助跑1个单步用时长短与步幅的大小变化关联密切,步长与用时的节奏变化总体表现为“相互对应”关系;当具体到不同试跳中,这种看似具有普遍性的规律又与特殊性共存,即步幅大小变化与用时长短变化实际是一种相对而非绝对匹配关系,例如第3、5次试跳。其余成绩相对较好的跳次中步幅与时间节奏变化基本一致,因此,倒3~倒1步用时“中-长-短”节奏与步幅“中-大-小”节奏相匹配是创造优异成绩的理想模式。
2.1.3 速度特征
2.1.3.1 平均速度特征
三级跳远的“速度“核心在业内已成共识,关于助跑速度量级的观点主要聚焦于最大速度和最佳速度两种理论,前一理论重点强调最大速度能力的必要性,后者则更加重视助跑速度的可控性。为进一步探索助跑速度的量级及调控的节点,本文对助跑后半程速度节奏进行了相关验证。
有关助跑速度的研究多集中于板前11~6 m、6~1 m处的速度值,这种计算方式主要是借助于场地自然条件进行距离标定,反映的是助跑板前倒5~倒1步速度变化。研究结果证实:从板前11~6 m至6~1 m处,多数运动员是以积极加速的方式上板。如果要具体的反映每个单步速度及其相邻之间的节奏,这种自然标定显然已不能满足研究需求,本研究通过大范围二维标定有针对性地解决了这一技术难题。
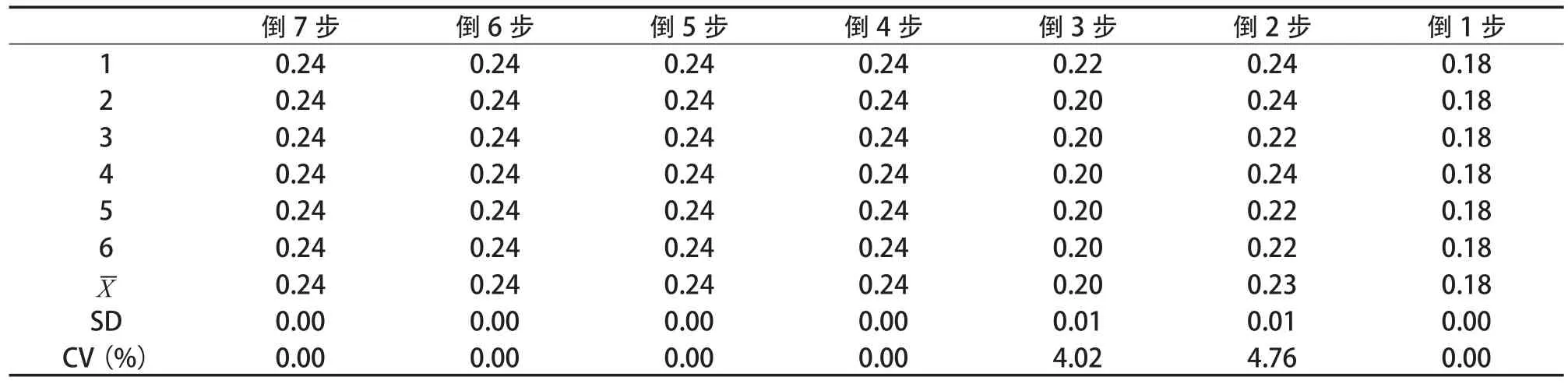
表4 泰勒助跑板前7~1步时间 (s)Table 4 Times in the Last 7~1 Strides of the Approach
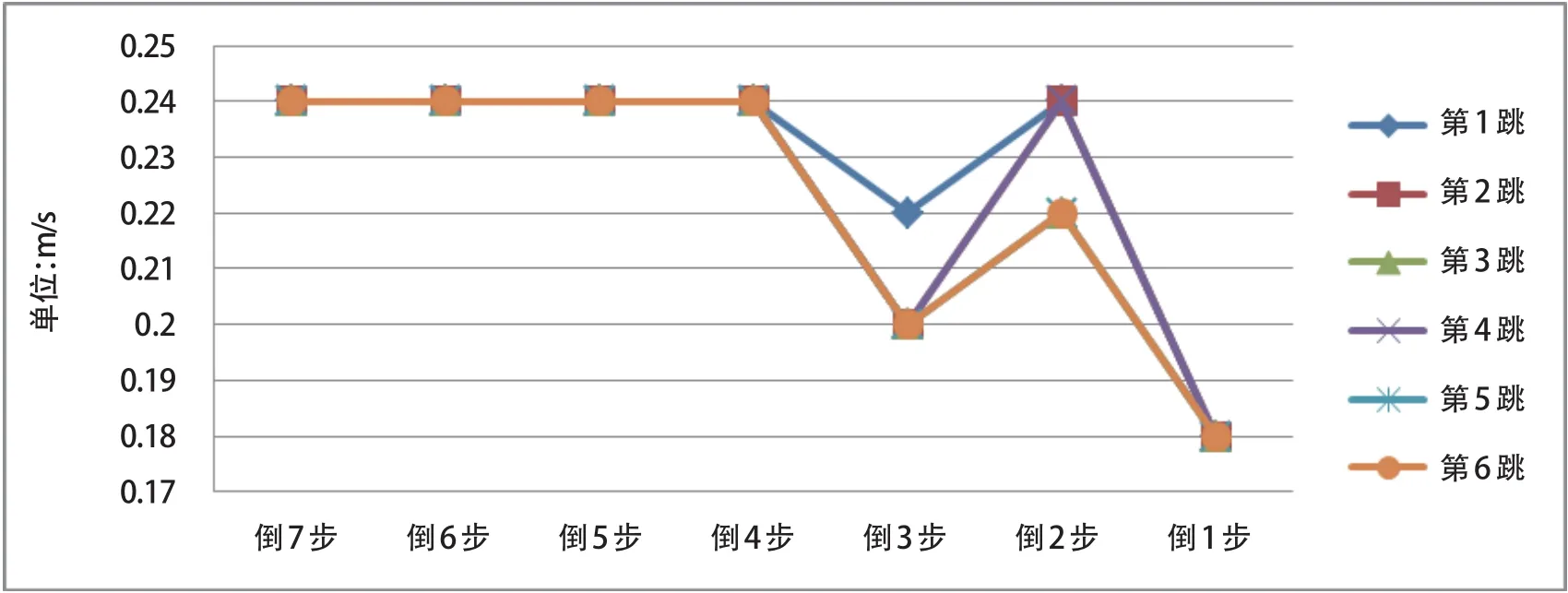
图4 泰勒助跑板前7~1步时间变化趋势Figure 4 The Changing Trend of the Times in the Last 7~1 Strides of the Approach
在速度的量级上,平跳型运动员助跑板前倒7~倒1步每个单步的速度均值在10.40~11.94 m/s区间(表5),倒2步速度最慢,倒1步速度最快,单步速度峰值达到12.28 m/ s。多数情况下助跑速度的峰值出现在倒1步,但速度最快并不意味最成绩最佳,如第1、2次试跳;与此相对应,较慢的速度同样不易获得较好成绩,如第5次试跳;尽管第6次试跳倒1步速度仅有11.78 m/s,但这种低于均值的助跑速度却恰恰创造了18.21 m的惊人成绩。通过分析上述现象,本研究认为:绝对速度是三级跳远运动员创造优异成绩的前提条件,对助跑最大速度的调控能力是创造优异成绩的关键。
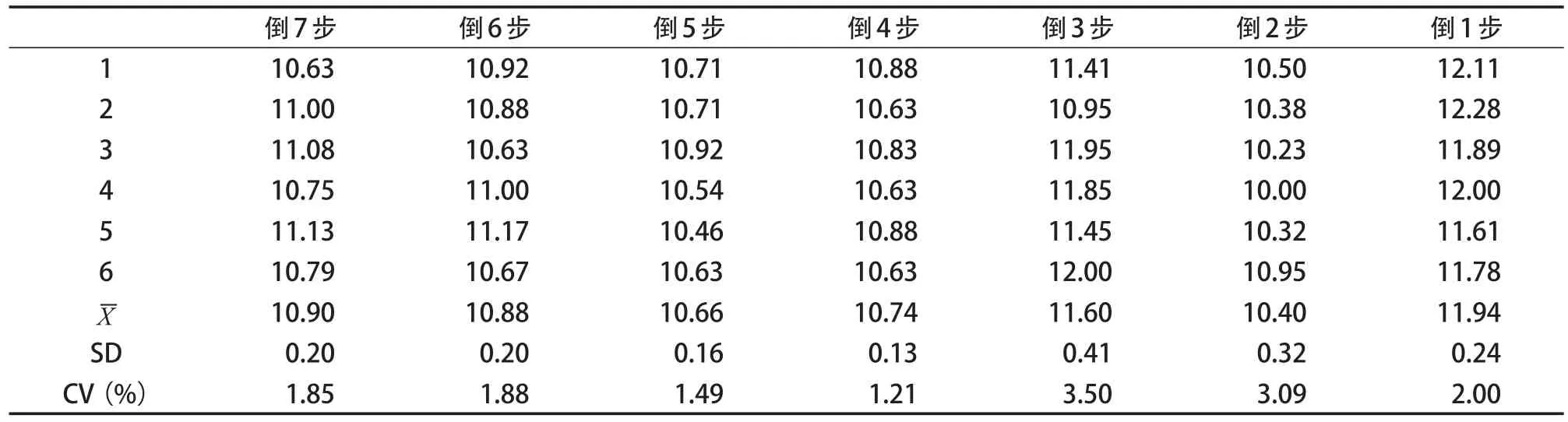
表5 泰勒助跑板前7~1步速度 (m/s)Table 5 Average Velocities in the Last 7~1 Strides of the Approach
助跑板前倒7~倒1步速度与步幅、时间调控相类似,均包含稳定与非稳定双结构,与之不同的是倒3~1步峰谷位置发生相对改变。在步幅“中-大-小”节奏和时间“中-长-短”节奏共同影响下,助跑板前倒3~倒1步最终形成了“中-慢-快”的速度节奏模式(图5)。根据表3、表4、表5的变异系数CV分析,板前倒7~倒4步单步的步幅、时间、速度参数较为稳定,倒3~倒1步参数离散程度稍大一些,其中倒3~倒2步尤为突出,根据这一技术特征表现基本确定板前倒3~倒2步是助跑节奏控制的重点。在18.21 m的试跳中,泰勒倒2步保持了10.95 m/s的平均速度,倒2~倒1步的速度损失仅有0.82 m/s,这两项指标明显有别于其他跳次。因此,稳定倒3~倒1步速度节奏、保持倒2步速度的绝对优势并提高倒1步速度的利用率是提高助跑速度实效性的关键环节。
图5 泰勒助跑板前7~1步速度变化趋势Figure 5 The Changing Trend of the Average Velocities in the Last 7~1 Strides of the Approach
通过对单步的速度与步幅、时间、成绩的统计学分析,研究结果显示:倒4~倒1步相邻之间速度(P<0.01)及倒4步与倒2步速度(P<0.05)差异显著。倒7~倒4步及倒1步步幅均与速度显著相关(r=1,P P<0.01),倒3~倒2步不具有统计学意义很可能是受较大离散程度的影响。助跑一个单步的步幅、时间及速度与运动成绩均无相关关系,进一步证实助跑对三级跳远运动成绩的影响并不完全取决于动作结构单元的某一项技术参数,起决定性作用的是整体运动节奏。
2.1.3.2 瞬时速度特征
三级跳远助跑速度包括平均速度、瞬时速度、最大(小)速度等多种存在形式,因研究目的、实验条件及对项目本质特征认识等差异,瞬时速度的研究主要集中于助跑倒2~倒1步。运动视频图像多重处理技术分析结果显示:在倒2~倒1步一个单步的支撑阶段,膝关节角度始终处于减少状态而踝关节的缓冲与蹬伸变化则相对清晰。
助跑倒2~倒1步的支撑阶段,身体重心多在缓冲环节发生水平速度损失,在关节积极蹬伸及肢体的协调摆动作用下,蹬伸环节不仅对前一环节的速度损失进行了“补偿”,离地速度甚至超过了着地速度(表6)。成绩相对较好的跳次在倒2步支撑阶段会出现速度损失,即离地速度并不总是超越着地速度;倒2~倒1步支撑阶段的速度变化均遵循“先减少后增加模式” (图6)。
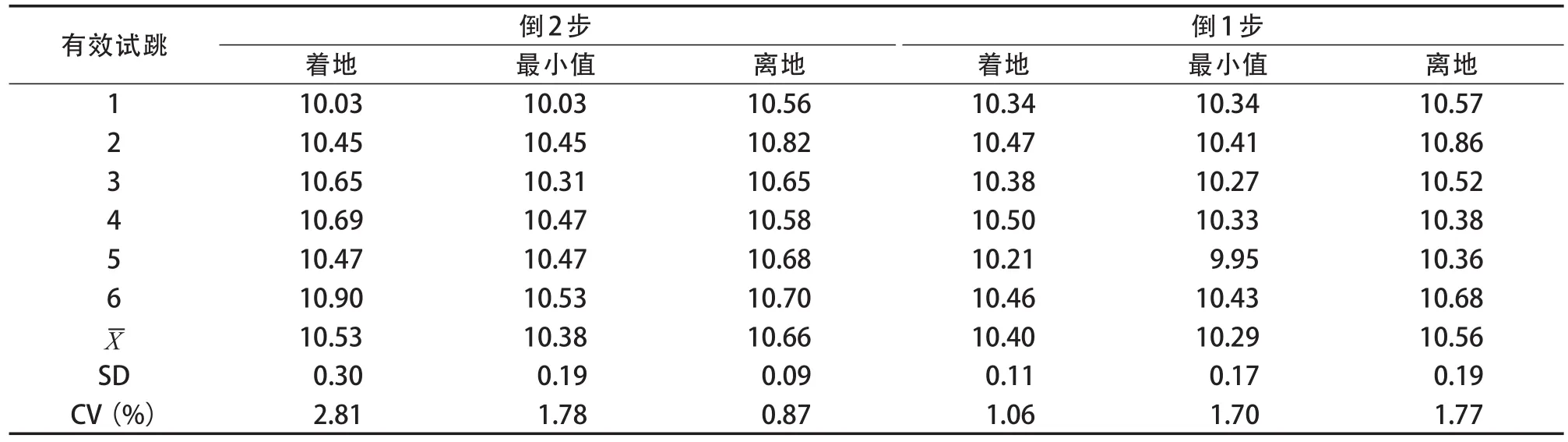
表6 泰勒倒2~倒1步身体重心瞬时水平速度 (m/s)Table 6 Horizontal BCM Velocities in the Last 2~1 Strides of the Approach
根据助跑倒2~倒1步身体重心着地瞬间、离地瞬间及最小速度值的统计检验结果,倒2步着地与离地瞬时速度差异非常显著(P<0.01),倒2~倒1步着地速度不仅与最小速度值高度相关(r1=0.825、r2=0.873,P<0.05),也是唯一与运动成绩高度相关且变异系数相对较大的参量(r=0.955,P<0.01)。着地前的积极摆动和离地前的有力蹬伸不仅为最大助跑速度的保持创造了条件,也为优异成绩的获得奠定了坚实的基础。
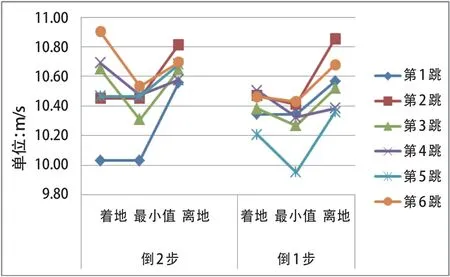
图6 泰勒倒2~倒1步身体重心瞬时水平速度变化趋势Figure 6 The Changing Trend of the Horizontal BCM Velocities in the Last 2~1 Strides of the Approach
2.2 重心高度特征
“降重心”是跳跃项目助跑最后阶段较为普遍的现象,教练员认为起跳前保持适宜的重心高度对起跳效果具有良好的促进作用。助跑倒2~倒1步,优秀运动员重心高度的均值变化区间为1.02~1.07 m,极值分别为0.98 m、1.12 m(表7)。在原有的认识中,助跑支撑阶段身体重心高度一般表现为“中-低-高”模式,即身体重心在缓冲环节会降低,蹬伸环节会有所提高。从本研究的均值变化分析,倒2~倒1步“中-低-高”模式并不存在,取而代之的是“低-平-高”和“高-低-平”两种上升与下降模式。通过上述分析可以确定:支撑阶段的缓冲环节是“降重心”的重要节点,倒1步是一个典型的低重心保持阶段。无论是成绩相对较好的跳次还是成绩相对较差的跳次,泰勒在倒2步的缓冲阶段及倒1步的蹬伸阶段均表现出良好的重心控制能力。
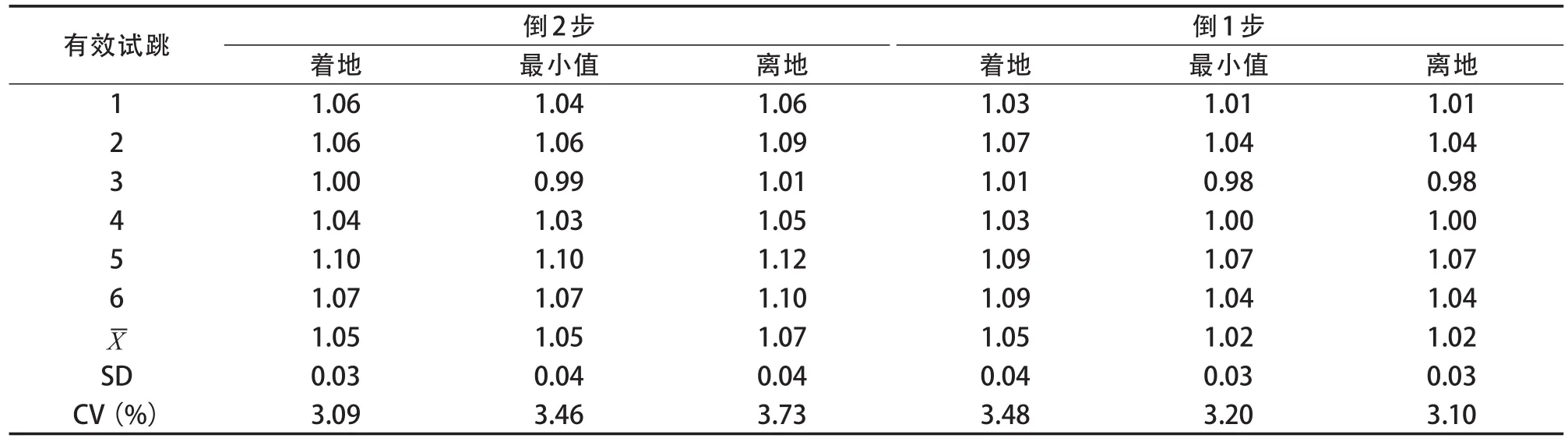
表7 泰勒倒2~倒1步身体重心高度 (m)Table 7 Height of BCM in the Last 2~1 Strides of the Approach
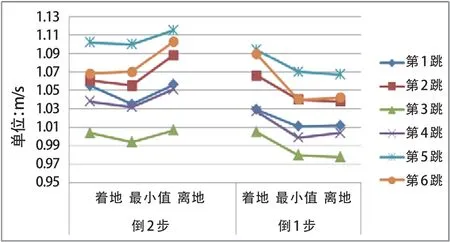
图7 泰勒倒2~1步身体重心高度变化趋势Figure 7 The Changing Trend of the Heights of BCM in the Last 2~1 Strides of the Approach
均值检验及相关性检验结果显示:倒2~倒1步离地瞬间身体重心的高度差异显著(P<0.05),对快速而准确上板的目的性要求是造成倒2~倒1步身体重心高度差异的主要原因。支撑阶段的着地、最大缓冲及离地瞬间,倒2~倒1步身体重心的高度两两之间高度相关(rmax=1、rmin=0.854,P<0.01),说明倒2~倒1步重心高度之间是环环相扣的关系,前一环节的异常变化有可能引起发后续环节的连锁反应。
2.3 角度特征
2.3.1 支撑腿关节角度
支撑腿关节角度变化是运动员下肢支撑能力的重要评价指标,是动作形式的重要体现。助跑倒2~倒1步(表8)着地瞬间,膝关节角度维持在148.99˚~151.56˚水平上,离地瞬间区间范围为140.25˚~142.77˚。整个支撑过程,膝关节始终处于“屈曲”状态,蹬伸不明显;倒2~倒1步着地瞬间踝关节角度保持在98.70˚~107.38˚区间,离地瞬间变化区间为111.23˚~119.59˚,踝关节角度在着地与离地瞬间与膝关节变化趋势完全相反,踝关节“屈伸”节奏清晰(图8),最小值区间为94.81˚~96.67˚。
通过对倒2~倒1步支撑腿膝、踝关节的变化幅度的比较可以看出:倒2步膝、踝关节缓冲幅度均是倒1步的两倍,但倒1步踝关节的蹬伸幅度恰恰是缓冲幅度的2倍。三级跳远支撑腿着地的缓冲动作实际上是膝、踝关节的共同作用,蹬伸动作是以踝关节蹬伸为主导,膝关节则保持“屈蹬”姿势。在地面反作用力自下而上的传递过程中,踝关节的有力蹬伸大大提高了重心速度传递的实效性,尤其是成绩较好的跳次,其倒1步离地时踝关节角度基本在120˚以上,因此踝关节的快速力量练习是三级跳远项目不可或缺的训练内容。
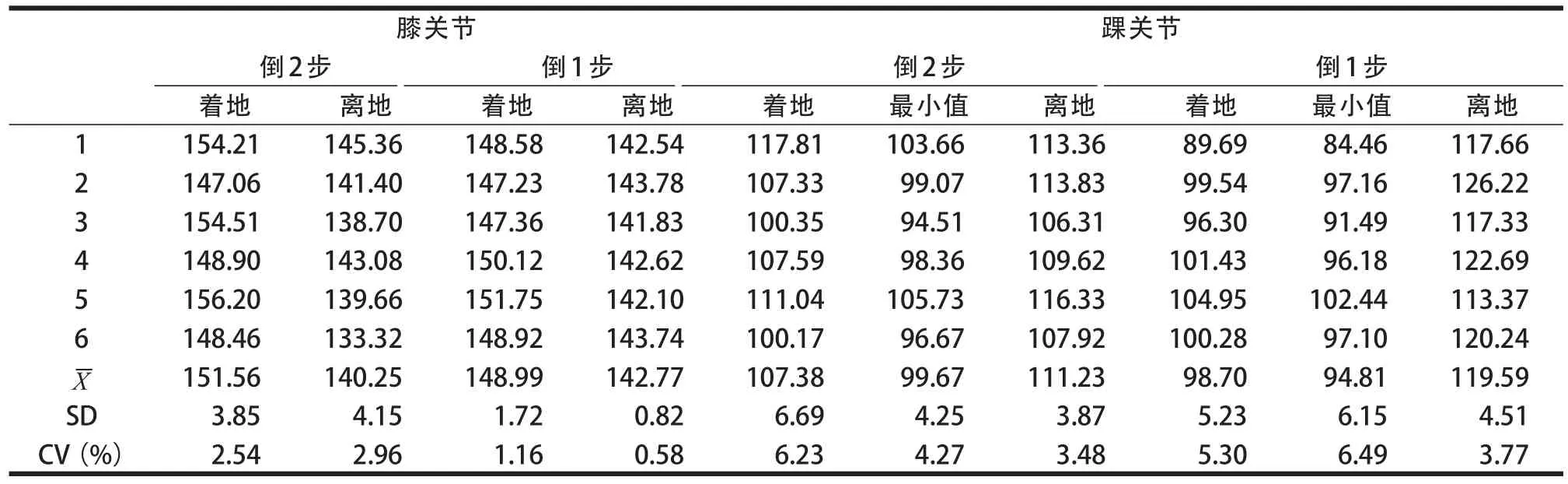
表8 泰勒倒2~倒1步支撑腿关节角度 (☒)Table 8 Joint Angles of Supporting Leg in the Last 2~1 Strides of the Approach
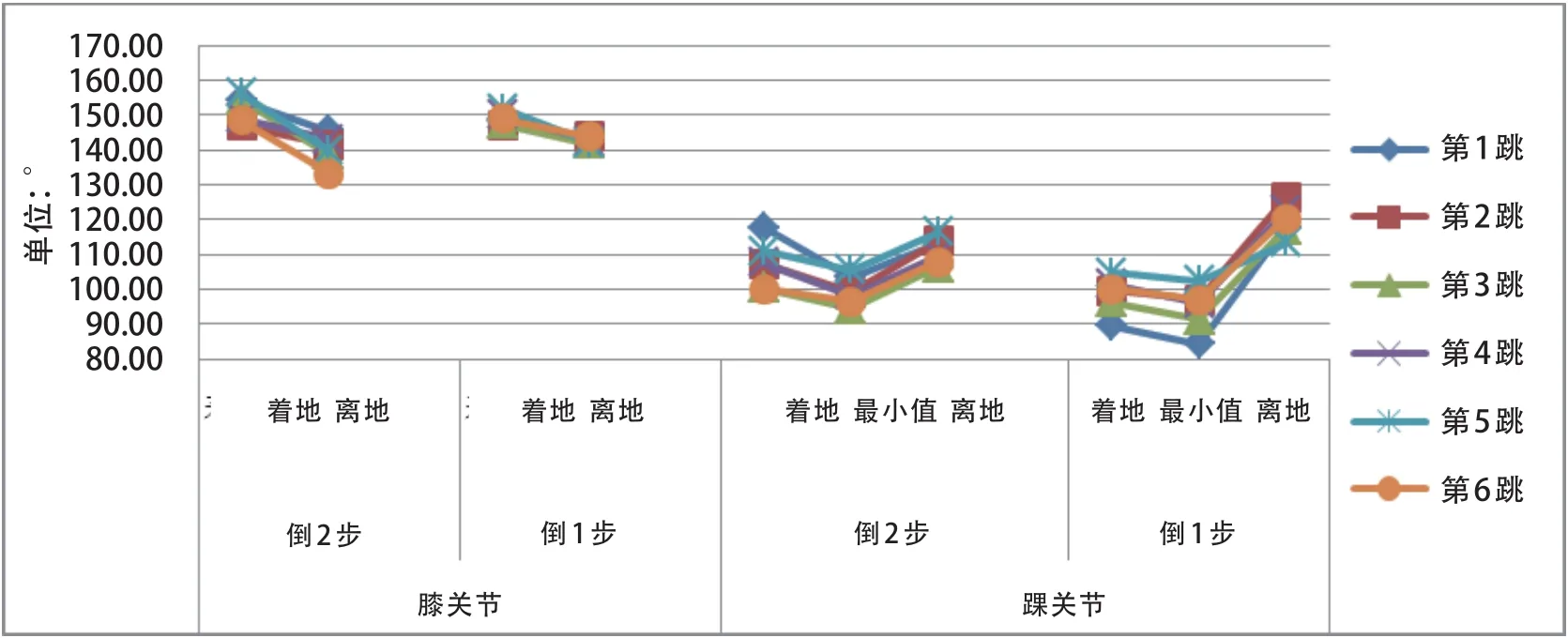
图8 泰勒倒2~倒1步支撑腿关节角度变化趋势Figure 8 The Changing Trend of Joint Angles of Supporting Leg in the Last 2~1 Strides of the Approach
为验证倒2~倒1步支撑腿关节角度在不同时相的差异性,均值检验结果显示:倒2~倒1步的膝关节角度及倒1步的踝关节角度在着地和离地瞬间差异非常显著(P<0.01);踝关节角度则在倒2~倒1步的着地、离地瞬间均存在显著性差异(P1<0.05,P2<0.01)。倒2~倒1步膝关节角度变化基本稳定,踝关节角度的变异性明显偏大。在上述研究中,倒2~倒1步身体重心高度有“低-平-高”和“高-低-平”2种变化模式,为进一步探究这一现象的本质,本文将支撑阶段重心高度与膝、踝关节角度进行了相关性检验,研究结果得出:倒2步离地、倒1步着地瞬间,身体重心的高度与踝关节角度相关但程度较弱(r1=0.668、r2=0.613,P>0.05),与膝关节角度并没有表现出统计学上的相关关系;由此可以推断,倒2~倒1步支撑阶段身体重心高度的影响因素可能还包括身体姿态、着地动作、踝关节力量等。
2.3.2 支撑与腾起角度
支撑阶段速度的损失主要与着地角度相关,着地角度越小制动支撑阻力越大,水平速度损失越多。本研究中(表9),助跑倒2~倒1步着地角度区间为80.33˚~83.83˚,离地角度变化区间为59.67˚~64˚;倒2步腾起角度2.38˚,倒1步则基本保持水平(-0.16˚);大着地角、小离地角、低腾空是助跑支撑阶段的基本技术特点。80˚~85˚的着地角度以及56˚~61˚的离地角度是减少助跑制动阻力、保持助跑水平速度,但能否对比赛成绩起决定性作用还要取决于运动员的蹬伸与摆动能力。
助跑倒2步、倒1步的着地角度与离地角度、腾起角度差异非常显著(P<0.01),倒2步着地角度与重心高度有一定相关关系(r=0.710,P>0.05),与着地瞬时水平速度、速度损失量、速度利用率均无统计学相关意义。根据主观分析及客观统计结果的对照,研究认为:着地角度与助跑速度虽然在统计学上并没有表现出直接的相关关系,但这一结果却恰恰突出了支撑能力与摆动积极性的重要性,因此,着地角度是影响助跑速度的重要条件,但起决定性作用的还是运动员支撑与摆动能力。
2.4 踏板效果特征
三级跳远实际距离由正式成绩和踏板损失距离两部分构成,实际距离与正式成绩高度相关(r=0.982,P<0.01)。踏板是三级跳远跑跳转换的关键环节,其准确性直接影响运动成绩的有效性。第15届世锦赛三级跳远决赛前12名选手踏板区间0.5~35.20 cm,均值8.54 cm,变异系数达到91.28%,踏板极不稳定。图10中,泰勒6次试跳踏板区间为9.20~35.20 cm,均值17 cm,后4次试跳准确性相对有所提高。如果第6次试跳踏板精度再提高8~9 cm的话,那么,保持近20年18.29 m的世界纪录有可能会被追平或打破。59%的变异系数(踏板损失距离)说明踏板稳定性相对较差,尤其是前两个跳次表现最为突出。三级跳远踏板准确性与稳定性不仅直接影响运动成绩的有效性,而且会对运动员的参赛心理产生激发或抑制作用。
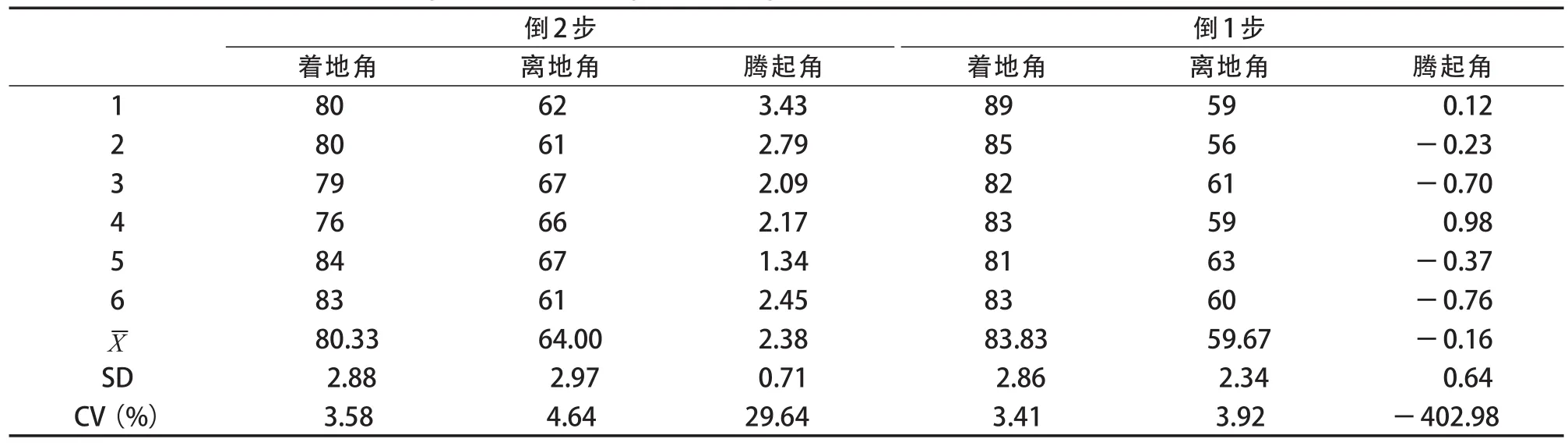
表9 泰勒倒2~倒1支撑及腾起角度 (☒)Table 9 Angles of Supporting and Taking off in the Last 2~1 Strides of the Approach
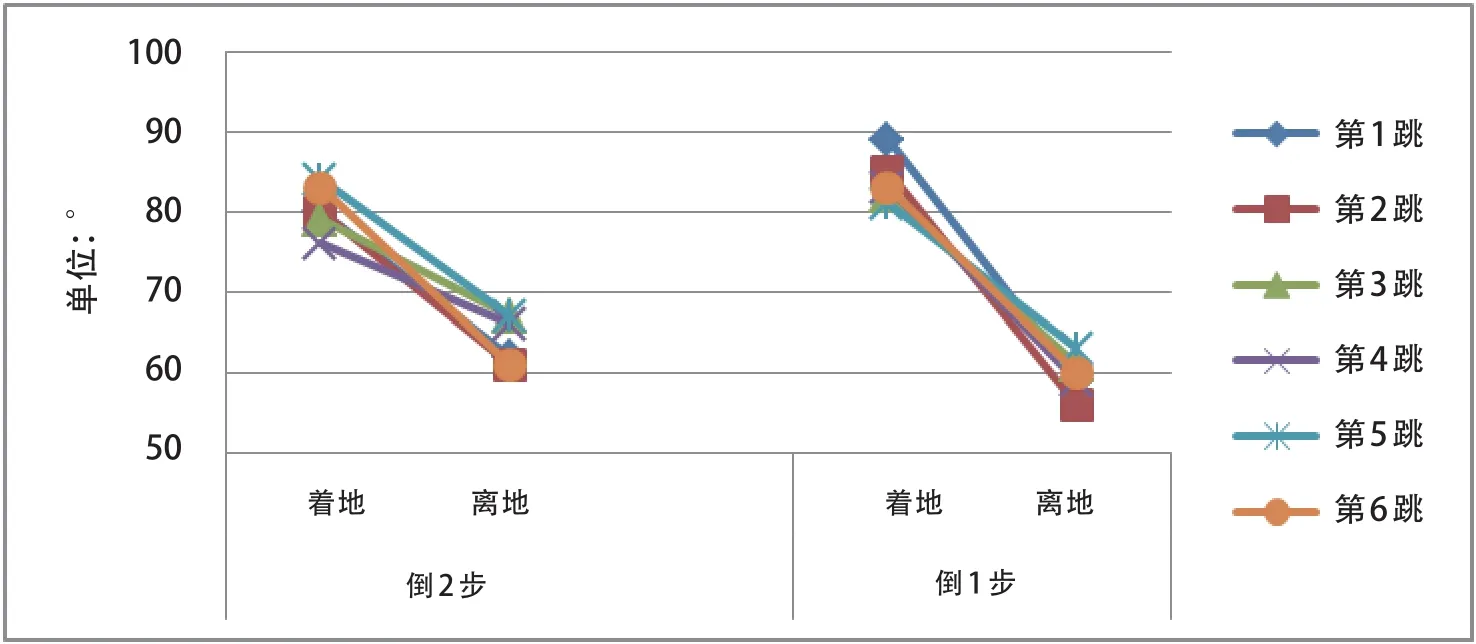
图9 泰勒助跑倒2~倒1步支撑角度变化趋势Figure 9 The Changing Trend of Supporting Angles in the Last 2~1 Strides of the Approach
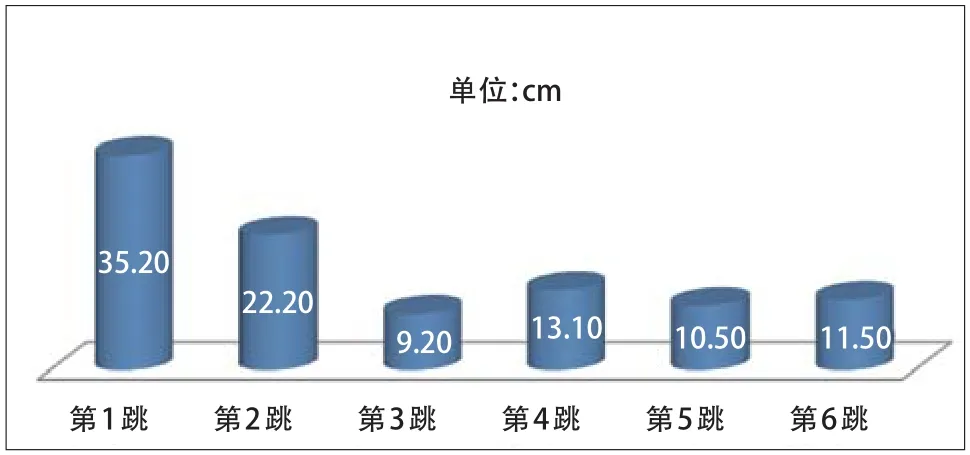
图10 6次试跳趾板距离Figure 10 Toe-to-board Distances of Six Attempts
三级跳远趾板距离与倒2步着地速度(R=-0.855,P<0.05)、步长(r=0.826,P<0.05)显著相关。除此之外,倒2步重心移动距离(r=0.695)及倒1步均速(r=0.669)、步幅(r=0.672)均同样影响踏板准确性(P>0.05)。根据上述研究结果可以得出:倒2步的步长与速度是踏板准确性的关键影响因素,适度缩短倒2步步长利于提高踏板准确性,倒2步以较快的速度着地并不意味着踏板准确性一定会降低。趾板距离与正式成绩(r=-0.671)、实际距离(r=-0.519)均负相关,间接证明了提高踏板准确性有助于提高竞技水平。
3 结论
1. 助跑倒4步是平跳型三级跳远节奏调整的临界点;倒3~2步参数变异性最大,是助跑节奏控制的重点与难点。
2. 助跑倒3~倒1步 “中-长-短”时间节奏与 “中-大-小” 步幅节奏相搭配是创造优异成绩的理想模式。
3. 稳定倒3~倒1步速度节奏、保持倒2步速度的绝对优势并提高倒1步速度的利用率是提高助跑速度实效性的关键环节。
4. 助跑支撑阶段的缓冲动作实际上是膝、踝关节的共同作用,蹬伸动作是以踝关节蹬伸为主导,膝关节则保持“屈蹬”方式。“快步频、大着地角、小离地角、屈蹬、低腾空”是倒2~倒1步基本技术特点。
5. 80˚~85˚的着地角度与56˚~61˚的离地角度相搭配利于减少助跑制动阻力、保持水平速度,但能否对比赛成绩起决定性作用主要取决于运动员的蹬伸与摆动能力。
6. 倒2步步长和速度是踏板效果的重要影响因素,提高踏板准确性有助于提高竞技水平。
[1] 何幼棣.对三级跳远技术的再理解[J].田径,2000,(6):16-17.
[2] 刘建国,范秦海,李建英,等.田径[M].北京:高等教育出版社,2009.
[3] 乔恩•爱德华兹[EB/OL].http://baike.baidu.com
[4] 宋亮,李文东,宋惠娟.爱德华兹三级跳远技术的运动学分析[J].体育成人教育学刊,2006,22(2):66-77.
[5] 袁晓毅,吴冀,赵俊华. 柏林田径世锦赛男子三级跳远运动员起跳技术分析[J].北京体育大学学报,2011,34(11):115-118.
[6] 詹姆斯•海.奥运会三级跳远运动员力量分配与运动成绩关系研究[J].田径,2000,(10):28-31.
[7] Biomechanics Report WC Berlin 2009 Triple Jump[EB/OL]. https://www.iaaf.org.
[8] ALLEN S J,KING M A,YEADON M R.Trade-offs between horizontal and vertical velocities during triple jumping and the effect on phase distances [J].J BioMech,2013,46:979-983.
[9] HAY J G,MILLE J A. Techniques used in the triple jump [J].Int J Sport BioMech,1985(1):185-196.
[10] YU B,HAY J G. Optimum Phase ratio in the triple jump [J].J BioMech,1996,29(10):1283-1289.
Study on the Characteristics of Approach of Men’s Triple Jump Champion Taylor at the 15thIAAF World Championships
ZHENG Fu-qiang1,2,YUAN Ting-gang2,LI Ai-dong2,WANG Guo-jie3,DAI Yong1,GUO Yuan-qi4
This study analyzed approach techniques of the balanced triple Jump by the methods of 2-D Video,expert interview and mathematical. The purposes of this study were to distinguish technology type,reveal the characteristics and rules of approach technique,strengthen the understanding of the nature and characteristics of the project and to provide useful reference for improving the level of scienti fi c training. Results:1) Amplitudes of the strides length variation in the last 7~1 adjacent strides are 1cm,5cm,2cm,22cm,3cm and 24cm;The time between adjacent single stride in the last 4~1 strides showed signi fi cant difference (P<0.01). 2) Average velocity in the last 7~1 strides of the approach is 11.02 m/s,the last 2 stride is the slowest (10.40 m/s),and the last 1 stride is to reach the peak (11.94 m/s);the touchdown velocity of the last 2 stride is the only parameter which is highly correlated with the athletic performance and the coef fi cient of variation is relatively large (R=0.955,P<0.01). 3) In the last 2~1 strides of the approach,the angles of touchdown and extension are maintained in the range of 80.33~83.83˚ and 59.67~64˚ respectively;The angle of takeoff in the last 2 stride is 2.38˚,but it’s maintained in 0°level (-0.16˚) basically in the last 1 stride. 4) The mean value of the toe-to-board distances of six attempts is 17cm,it’s showed a signi fi cant relationship with the last 2 touchdown velocity (R=-0.855,P<0.05) and the stride length (R=0.826,P<0.05). Conclusions:1) The last 4 stride of the approach is a critical point of the rhythm adjustment of the balanced triple jump;The last 3~2 strides are the focus and dif fi culty of the rhythm control and the variability of the parameters of it is the maximal. 2) In the last 3~1 strides,match “medium~long~short” time rhythm with “ medium~big~small” pace rhythm is an ideal model to create excellent results. 3) Stable the speed rhythm of the 3~1 strides ,maintain the absolute advantage of the last 2 speed and Improve the utilization rate of the last 1 speed are the critical links to improve the effectiveness of the approach speed. 4) Amortization action is actually a combined action of the knee and ankle joint during the supporting phase,extension takes the stretching of ankle joint as the leading,knee joint keep ”bending” mode. “quick stride frequency,large touchdown angle,small extension angle,kneebend and low fl ight are the basic technical features of the last 2~1 strides. 5) Match the touchdown angle in the range of 80~85˚ with the extension angle in the range of 56~61˚ is helpful to reduce braking resistance and maintain horizontal speed,but could it be to a decisive role to the competition results mainly depends on the capability of the athlete on stretch and swing. 6) Stride size and velocity of the last 2 stride is an important factor that affect the touchdown effect,Increasing the accuracy of the toe-to-board distance is helpful to improve the level of competition.
balanced triple Jump;approach rhythm;technical analysis;IAAF world championships;Taylor
G823.4
A
1002-9826(2017)03-0108-09
10. 16470/j. csst. 201703016
2016-10-11;
2016-12-13
国家体育总局体育科学研究所基本科研业务费资助项目(基本16-34)。
郑富强,男,讲师,博士,主要研究方向为田径教学训练理论与实践,E-mail:beitifuqiang@sina.com。
1.山东师范大学 体育学院,山东 济南 250014;2.国家体育总局体育科学研究所,北京100061;3.闽南师范大学 体育学院,福建 漳州363000;4.北京体育大学,北京,100084
1. Shandong Normal University,Jinan 250014,China;2. China Institute of Sport Science,Beijing 100061,China;3. Minnan Normal University,Zhangzhou 363000,China;4. Beijing Sport University,Beijing 100084,China.
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
十几岁(2021年31期)2021-12-26
发明与创新·大科技(2021年3期)2021-04-30
数理报(学习实践)(2021年5期)2021-04-07
疯狂英语·新阅版(2021年11期)2021-01-02
家庭医学(2017年8期)2017-09-06
人人健康(2017年1期)2017-01-24
发明与创新·中学生(2016年8期)2016-05-14
体育时空·上半月(2016年8期)2016-05-14
