
六维颅骨追踪技术在头部肿瘤放射治疗过程中体位误差的研究*
2017-06-01 10:45牛保龙鞠忠建戴相昆潘隆盛王金媛
中国医学装备 2017年3期
牛保龙 鞠忠建* 戴相昆 潘隆盛 王金媛
六维颅骨追踪技术在头部肿瘤放射治疗过程中体位误差的研究*
牛保龙①鞠忠建①*戴相昆①潘隆盛①王金媛①
目的:利用六维颅骨追踪(6D-skull)技术,研究头部肿瘤患者在放射治疗过程中的体位误差及位移量,为临床放射治疗靶区精确勾画提供参考。方法:随机选择15例行立体定向放射治疗(SRT)头部肿瘤患者,均采用6D-skull技术。治疗中每隔40 s采集一次正交图像,与数字重建图像(DRR)配准记录体位误差值。分析放射治疗执行前体位误差、治疗中采样点体位误差及体位位移量数据统计,由公式M=2.5Σ+0.7δ计算计划靶区(PTV)外扩间距。结果:放射治疗可执行前左右(X)、头脚(Y)、垂直(Z)线性体位误差分别为(-0.098±0.590)mm、(0.278±0.637)mm、(-0.071±0.679)mm,PTV外扩间距分别为0.168 mm、1.141 mm、0.298 mm。间隔40 s采样点误差分别为(-0.032±0.550)mm、(0.350±0.636)mm、(-0.058±0.821)mm,PTV外扩间距分别为0.305 mm、1.320 mm、0.430 mm。位移量计算d=d1-d0误差分别为(-0.015±0.550)mm、(-0.061±0.645)mm、(0.003±0.657)mm,PTV外扩间距分别为0.338 mm、0.299 mm、0.467 mm。3个线性方向、3个旋转角度的6个分组之间直线相关性分析L-R与DOWN-UP(r=0.023,P>0.05),Y轴与Z轴(r=0.513,P<0.05),8组两两直线正相关,7组负相关。三类线性数据中,Y轴变化较大,PTV外扩基本在1.6 mm之内。结论:利用射波刀6D-skull技术对患者头部肿瘤放射治疗过程中体位误差分析,能够较好的监测并修正头颈部肿瘤治疗前与治疗中的体位误差,实现对颅内肿瘤精确性放射治疗,同时也提供对临床颅内肿瘤PTV外放相应数据的参考。
六维颅骨追踪;头部肿瘤;图像引导;摆位误差;立体定向放射治疗;射波刀
牛保龙,男,(1982- ),本科学历,主管技师。解放军总医院放疗科,从事放射治疗工作。
近年来,立体定向放射治疗(stereotactic radiotherapy,SRT)成为研究热点,尤其是立体定向放射外科系统(CyberKnife,CK)的出现和应用,极大的推进了SRT技术的发展。CK与传统伽马刀相比实现了头部肿瘤无创伤的SRT,且在治疗过程中能够实时地对患者进行拍片验证及修正,提高了治疗精确度和可靠性。在临床放射治疗中,六维颅骨追踪(six dimensional-skull tracking,6D-skull)技术要求在0.95 mm之内[1]。然而,在日常放射治疗摆位过程中发现,摆位误差在图像引导下可以得到较好的纠正,但不能完全符合定位初始体位,尤其是在治疗过程中存在患者体位微小移动等情况。由于立体定向放射治疗技术等剂量线跌落陡峭、适形度高,如果实际位置与预想的位置相差较大,最终追踪精度可能达不到要求,从而影响患者的治疗效果。因此,本研究拟通过6D-skull技术对头部肿瘤靶区实施追踪并研究患者治疗过程中体位精度的变化及相互关系。
1 资料与方法
1.1 一般资料
选取2015年1-12月解放军总医院收治的15例头部肿瘤患者,其中男性11例,女性4例;中位年龄59岁;其中10例患者为恶性肿瘤,5例患者为良性肿瘤,身体状态良好。平均治疗时间为27 min。采用卡氏功能状态评分(Karnofsky,KPS)标准测评,均>70分,能够接受临床正常放射治疗过程。
1.2 仪器设备
使用CyberKnife直线加速器(美国Accuray公司,第4代)进行放射治疗。
1.3 定位图像获取及靶区勾画
15例患者统一采用头颈肩低温热塑膜+头颈肩板进行体位固定,根据临床要求确定定位中心十字线标记,获取X射线计算机断层成像(X-ray computed tomography,CT)和磁共振成像(magnetic resonance imaging,MRI)头部定位图像,扫描层厚1.5 mm。在MIM Software(version6.6)系统融合两种图像,勾画肿瘤临床靶区及危机器官。
1.4 治疗实施
根据临床放射治疗处方剂量,在Multi plan System(Ver4.02)计划系统上设计放射治疗物理计划,采用6D-skull方式。治疗过程中通过实时正交X射线平片图像与对应数字重建图像(digital reconstructedly radiograph,DRR)进行对比,计算3个线性方向与3个旋转方向体位误差,并经过机械臂调整加速器的照射位置予以纠正[2]。
治疗过程中每隔40 s采集一幅正交图像进行配准,并记录其体位误差。如果数值在机械臂校准范围内,六维方向分别为10 mm、10 mm、10 mm,1°、1°、3°,其自动完成该误差校准再行治疗。如果超出其规定范围则无法实现自动校准并自动终止治疗,采用人工调整治疗床后纠正其误差,达到临床要求再行治疗。
1.5 数据记录标准及统计方法
采用机器自动获取误差数据及标定的方向取值正负号(见表1)。
表1 各方向及正负号规定
1.6 统计学方法
采用SPSS18.0软件统计分析和Bivariate相关分析方法,计量资料结果以均值±标准差(x-±s)表示,以P<0.05为差异有统计学意义。系统误差(∑)以体位误差的平均值表示,随机误差(δ)以标准差表示。根据公式M=2.5∑+0.7δ计算外放范围(M)[3-4]。

表2 图像配准调整后可执行放射治疗的体位误差分析(分次)
2 结果
2.1 分次之间治疗前体位误差分析
所有患者总共进行45次治疗,记录图像配准调整后可执行放射治疗的体位误差45次数据,即机器系统默认误差值范围内即可执行治疗,其数据符合正态分布要求。X轴、Y轴和Z轴3个方向线性体位误差(均数±标准差)分别为(-0.098±0.590)mm、(0.278±0.637) mm和(-0.071±0.679)mm;L-R、DOWN-UP和CW-CCW的3个方向旋转体位误差(均数±标准差)分别为(-0.078±0.480)°、(0.000±0.535)°和(-0.162±1.208)°。根据公式M=2.5∑+0.7δ计算射波刀治疗头颅肿瘤PTV外放间距X轴、Y轴和Z轴分别为0.168 mm、1.141 mm和0.298 mm,见表2。
2.2 治疗过程中每40 s间隔采集图像配准误差分析
15例患者进行45次放射治疗,每隔40 s治疗实时采集数据1335组,其数据符合正态分布要求。X轴、Y轴和Z轴3个方向线性体位误差分别为(-0.032±0.550)mm、(0.350±0.636)mm和(-0.058±0.821) mm。L-R、DOWN-UP和CW-CCW的3个方向旋转体位误差(x-±s)分别为(-0.063±0.441)°、(0.023±0.476)°和(-0.113±1.307)°。根据公式M=2.5∑+0.7δ计算射波刀治疗头颅肿瘤外放边界X轴、Y轴和Z轴分别为0.305 mm、1.320 mm和0.430 mm,见表3。
各时刻点线性体位与旋转体位误差三维空间散点图如图1所示。
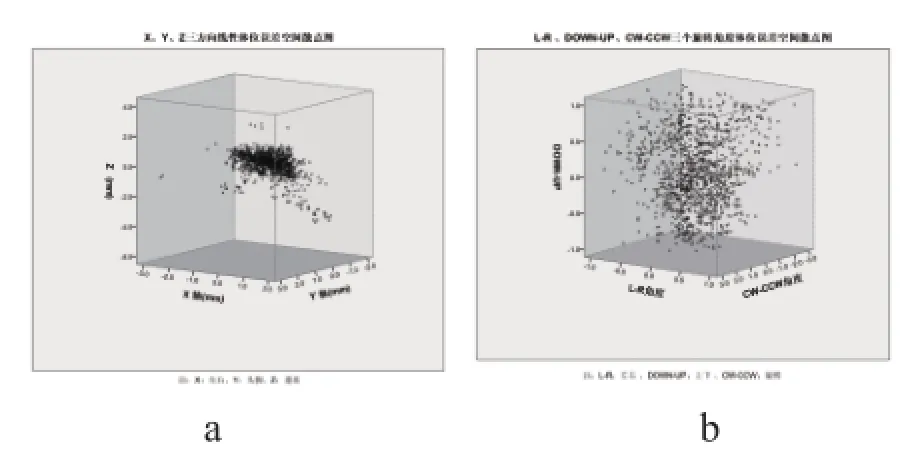
图1 体位误差三维空间散点图
2.3 治疗中体位位移量分析
15例患者在每次治疗时设定颅骨影像追踪每隔40 s采集一幅正交图像进行配准,获取所有患者图像配准误差。以可执行放射治疗体位误差为基础d0,每隔40 s采集图像配准误差为实时d1。计算间隔40 s时刻处相对位移量,即d=d1-d0,绝对值位移量为︱d︱,总计得出1290组数据,其数据符合正态分布要求。X轴、Y轴和Z轴3个方向线性体位位移量(x-±s)分别为(-0.015±0.550)mm、(-0.061±0.645) mm和(0.003±0.657)mm,L-R、DOWN-UP和CW-CCW的3个方向旋转体位位移量(x-±s)分别为(-0.032±0.362)°、(-0.026±0.482)°和(-0.048±0.807)°。根据公式M=2.5∑+0.7δ计算射波刀治疗头颅肿瘤外放边界边界X轴、Y轴和Z轴分别为0.338 mm、0.299 mm和0.467 mm,见表4。
上述三类数据总结分析见表5。
表3 15例患者治疗过程中40 s时间间隔采集图像配准体位误差分析(±s)
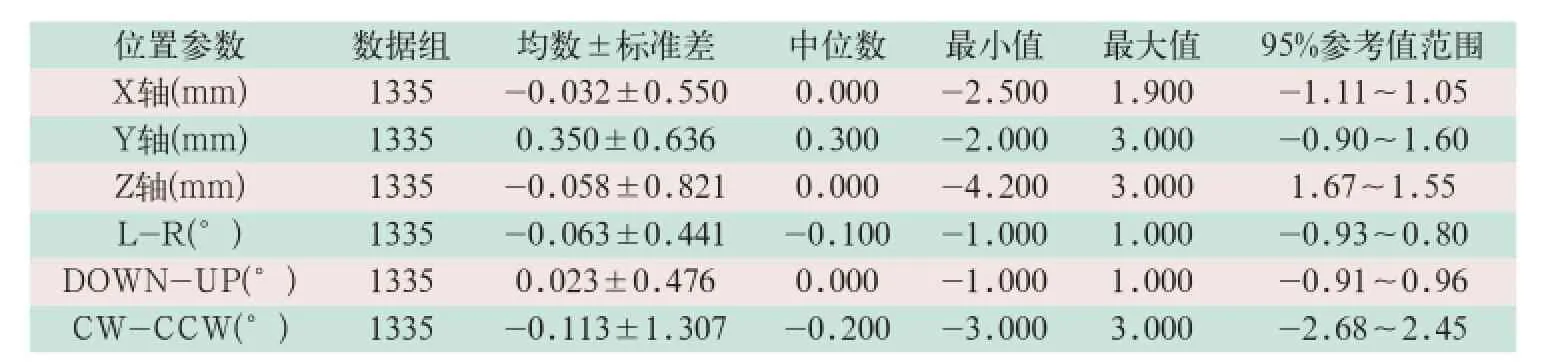
表3 15例患者治疗过程中40 s时间间隔采集图像配准体位误差分析(±s)
位置参数数据组均数±标准差中位数最小值最大值95%参考值范围X轴(mm)1335-0.032±0.5500.000-2.5001.900-1.11~1.05 Y轴(mm)13350.350±0.6360.300-2.0003.000-0.90~1.60 Z轴(mm)1335-0.058±0.8210.000-4.2003.0001.67~1.55 L-R(°)1335-0.063±0.441-0.100-1.0001.000-0.93~0.80 DOWN-UP(°)13350.023±0.4760.000-1.0001.000-0.91~0.96 CW-CCW(°)1335-0.113±1.307-0.200-3.0003.000-2.68~2.45
表4 15例患者治疗过程中体位位移量分析(±s)
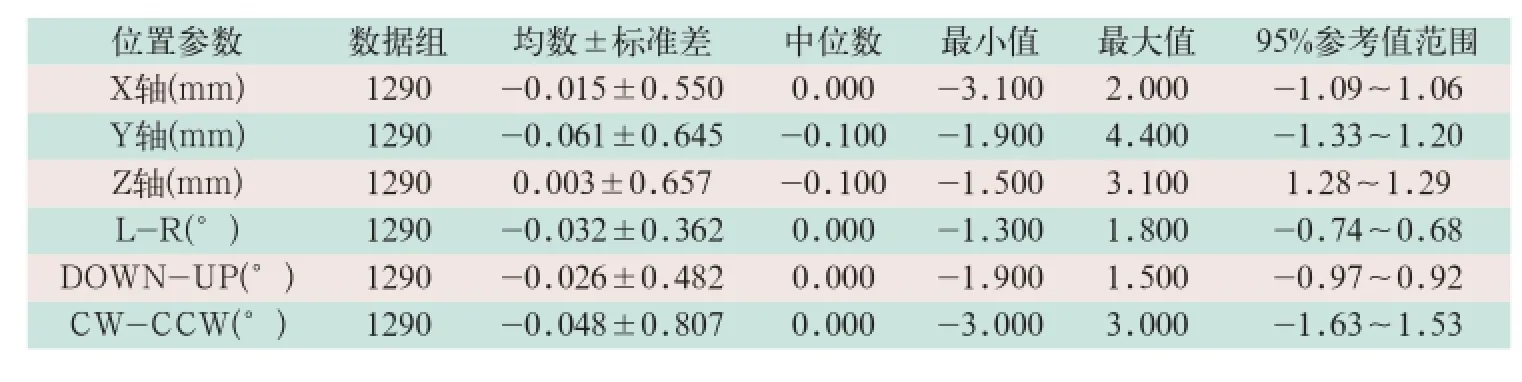
表4 15例患者治疗过程中体位位移量分析(±s)
位置参数数据组均数±标准差中位数最小值最大值95%参考值范围X轴(mm)1290-0.015±0.5500.000-3.1002.000-1.09~1.06 Y轴(mm)1290-0.061±0.645-0.100-1.9004.400-1.33~1.20 Z轴(mm)12900.003±0.657-0.100-1.5003.1001.28~1.29 L-R(°) 1290-0.032±0.3620.000-1.3001.800-0.74~0.68 DOWN-UP(°) 1290-0.026±0.4820.000-1.9001.500-0.97~0.92 CW-CCW(°) 1290-0.048±0.8070.000-3.0003.000-1.63~1.53
表5 三类数据分析总结(±s)
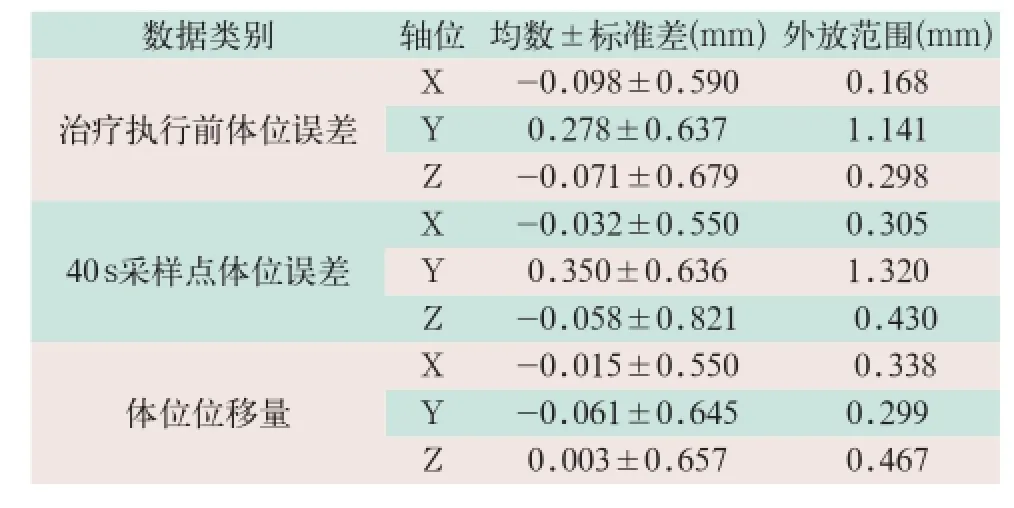
表5 三类数据分析总结(±s)
2.4 治疗中6个方向组体位误差数据分析
15例患者从开始可以执行放射治疗体位误差值及在放射治疗过程中每隔40 s采集一次体位误差值过程。获得6个分组总数据,每组1335个数据,即3个线性方向X轴、Y轴及Z轴,3个旋转方向L-R、DOWN-UP及CW-CCW。分别做两两直线相关性分析。结果显示,除L-R与DOWN-UP不具有直线相关性(r=0.023,P>0.05),其余两两直线相关性分析具有统计学显著意义。Y轴与Z轴具有较强正相关性(r=0.513,P<0.01),其余存在较弱正负相关性。8组正相关,7组负相关,1组无意义,见表6。
3 讨论
近年来,CyberKnife在SRT中的广泛应用,其突出特点是治疗的精准性以及剂量分布高度集中适形,能保证在患者治疗过程中精准可靠[5-6]。精确放射治疗的关键是治疗计划能否精准实施,其关键在于患者每次的治疗体位是否精准,治疗位置准确度将直接影响着患者的治疗效果。相关研究表明,在放射治疗物理计划执行过程中,与机器系统等误差相比,患者的摆位误差对剂量分布影响更明显[7]。在治疗过程中,每次患者治疗的摆位位置均有所变化,可能会导致部分靶区不能得到足够的剂量,靶区临近的正常组织、器官受到错误的照射[8-9]。临床研究发现,3%~5%的剂量误差就会造成肿瘤放射治疗的有效率下降,同时正常组织并发症发生率增加,并且高剂量区可能偏移至危及器官区域,造成严重并发症[10-11]。影像引导技术在放射治疗中的应用使得患者摆位误差得到纠正,提高了放射治疗的精确度,目前大部分影像引导技术只能解决治疗前的体位误差,但是对治疗过程中体位变化无能为力。随着SRT技术的开展,使得患者放射治疗时间增长,其过程中的体位变化差异及时纠正将非常必要。
在本研究中,15例头部肿瘤患者的KPS评分均>70分,其身体状况及自我意识控制处于良好状态,具备较好的单次长时间放射治疗的依从性,从而为精准放射治疗奠定了良好基础。在体位误差数据分析中,本研究提取摆位误差调整后可执行放射治疗时的体位误差及40 s时间间隔点体位误差综合分析。有关研究文献报道,旋转对靶区剂量改变很小,可以忽略,由此造成的影响也很小,因此本研究不包括旋转误差[12-13]。本研究在三类体位误差与体位位移量分析中显示,Y轴变化较大,X轴与Z轴变化相对平稳。95%参考值范围都基本符合靶区临床外放1.6 mm形成PTV要求。通过上述数据综合考虑,引起Y轴方向变化较大原因为头肩膜具固定中下颌口部活动引起的模具空隙及辅助头肩板头枕的符合度存在个体差异较大等因素。由于头颈肩热塑膜固定方式的广泛采用,研究发现这种固定装置可极大减少摆位误差,基本符合SRT治疗要求[14]。在治疗过程中患者存在不自主的运动,其范围通过数据分析基本可控,但本研究选取患者处于较好的KPS评分,因此存在一定的局限性认识,不除外在较低评分发生较大范围的体位位移量。但采用6D-skull技术,只要其3个线性方向体位误差范围均在机器允许10 mm之内,3个旋转方向体位误差分别在1°、1°和3°之内,都可以通过机械臂自动调整其体位误差。射波刀机械臂重复定位精度为0.2 mm[15-16]。因此,机械臂对靶区定位误差的修正与其重复定位精度无太大关系。因此,CyberKnife在头部肿瘤患者治疗中有比较好的优势。
在3个旋转方向体位误差中考虑头部近圆形结构存在较大角度变化,其中CW-CCW方向配准体位误差均接近±3°,L-R与DOWN-UP方向也均接近±1°。通过其相应三维散点图发现3个旋转方向体位误差变化较为散乱,这可能与6D-skull技术中正交X射线平片图像局限性有关,有待后续临床进一步研究。在数据相关性分析中Y轴与Z轴正相关性紧密,与其Y轴方向变化有比较大关系,即Y轴、Z轴变化互相影响。其他两两相关性较弱,这可能与头部近圆形刚性体有关系,需要临床进一步验证试验。
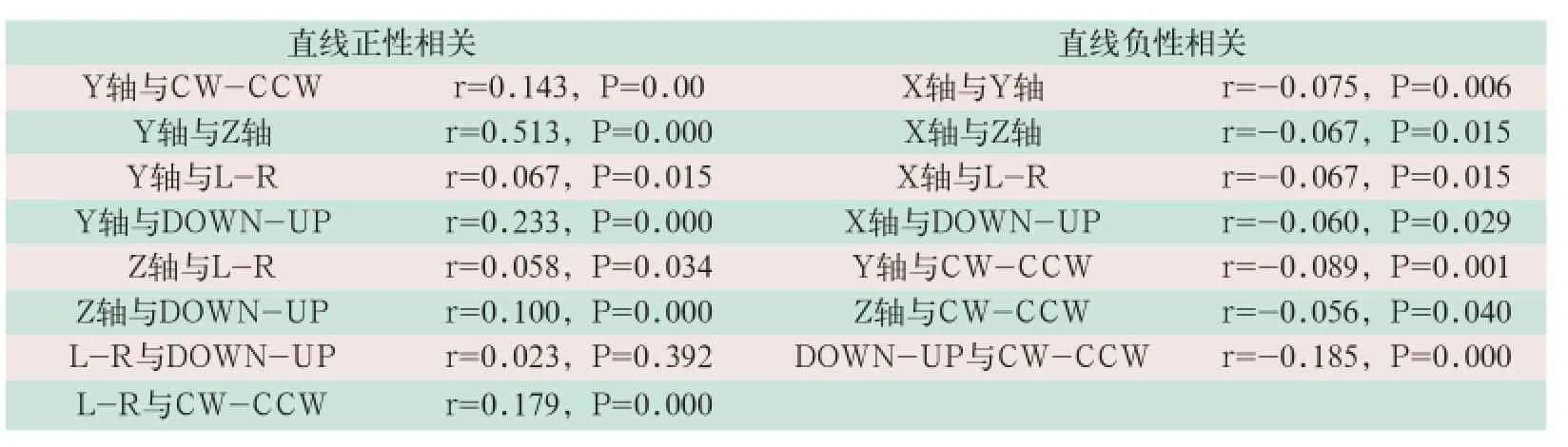
表6 15例患者放射治疗过程中6组数据相关性分析总述
4 结语
6D-skull技术在头部肿瘤SRT治疗中,对患者体位变化能起到较好修正作用,并能验证患者在长时间的治疗过程中的动度变化问题,进一步为临床医生提供头部肿瘤靶区勾画及外放范围的依据。
[1]沈君姝,耿薇娜,王朋,等.射波刀的物理质量保证和质量控制[J].生物医学工程与临床,2012,16(2):193-196.
[2]Thariat J,Marcie S,Marcy PY,et al.Cyberknife robotic stereotactic radiotherapy:technical aspects and recent developments[J].Bull Cancer,2010,97 (7):807-818.
[3]van Herk M,Remeijer P,Rasch C,et al.The probability of correct target dosage:dosepopulation histograms for deriving treatment margins in radiotherapy[J].Int J Radiat Oncol Biol Phys,2000,47(4):1121-1135.
[4]van Herk M.Errors and margins in radiotherapy[J].Semin Radiat Oncol,2004,14(1):52-64.
[5]殷蔚伯,谷铣之.肿瘤放射治疗学[M].3版.北京:中国协和医科大学出版社,2002:1301.
[6]王彬冰,单国平.补偿角度算法纠正放射治疗摆位旋转误差[J].中国医学装备,2015,12(6):28-30.
[7]Xing L,Lin ZX,Donaldosn SS,et al.Dosimetric effects of patient displacement and collimator and gantry angle misalignment[J].Radiotherapy Oncology,2000,56(1):97-108.
[8]郭根燕,刘晓岚,郑旭,等.电子射野影像系统对鼻咽癌调强放疗摆位误差的测量[J].中国辐射卫生,2011,20(3):321-324.
[9]Dische S,Saunders MI,Williams C,et al.Precision in reporting the dose given in a course of radiotherapy[J].Radiotherapy Oncol,1993,29(3):287-293.
[10]Hurkmans CW,Remeier P,Lebesque JV,et al. Setup verification using portal imaging:Review of current clinical practice[J].Radiotherapy Oncol,2001,58(2):105-120.
[11]成俊,李伟,徐金济,等.40例盆腔恶性肿瘤放射治疗摆位误差分析[J].吉林医学,2014,35(27):6044-6045.
[12]Remeijer P,Geerlof E,Ploeger L,et al.3-D portal image analysis in clinical practice:811 evaluation of 2-D and 3-D analysis techniques applied to 30 prostate cancer patients[J].Int J Radiat Oncol Biol Phys,2000,46(5):1281-1290.
[13]Fu W,Yang Y,Li X,et al.Dosimetrie effects of patient rotational setup errors on prostate IMRT treatments[J].Phys Med Biol,2006,51(20):5321-5331.
[14]董清,陈勇,刘伟,等.头颈部肿瘤精确放疗摆位误差的分析[J].齐齐哈尔医学院学报,2012,33(2):176-177.
[15]沈君姝,李兵,戴威,等.射波刀—放射外科新设备[J].现代肿瘤医学,2010,18(11):2289-2291.
[16]曹洋森,于春山,刘永明.射波刀同步追踪方式对头脚及左右运动肿瘤治疗的误差分析[J].医疗卫生装备,2014,35(5):103-104,150.
A study of position errors in radiotherapy of brain tumor with Cyberknife 6D skull tracking technology/
NIU Bao-long, JU Zhong-jian, DAI Xiang-kun, et al//
China Medical Equipment,2017,14(3):32-36.
Objective: To study position errors and placement distance of brain tumor patients in radiotherapy by using Cyberknife 6D skull tracking technology, so as to provide the reference for accurate delineation in clinical radiotherapy target area. Methods: All 15 brain tumor patients with stereotactic radiotherapy (SRT) as random selection were used Cyberknife 6D skull tracking technology. The orthogonal images (one image per 40s) were registered and compared with DDR and then the position errors were recorded. To analyze the position errors pre-radiotherapy, the position errors of sample point during treatment and position displacement, and then calculate the extended separation distance of PTV by the formula: M=2.5Σ+0.7δ. Results: In pre-radiotherapy, the linear position errors on left-right (LR), down-up (DOWNUP) and rotation(CW-CCW) were (-0.098±0.590) mm, (0.278±0.637) mm and (-0.071±0.679) mm, and the extended separation distance of PTV were 0.168mm, 1.141mm and 0.298mm, respectively. The sampling point errors which were 40 seconds interval during the whole radiotherapy were X(-0.032±0.550) mm, Y(0.350±0.636) mm and Z(-0.058±0.821) mm, respectively; and the extended separation distance of PTV were 0.305mm, 1.320mm and 0.430 mm, respectively. The position displacement errors of three directions were X(-0.015±0.550)mm, Y(-0.061±0.645)mm and Z(0.003±0.657); and compared with them, the extended separation distance of PTV were 0.338 mm, 0.299 mm and 0.467mm. In the linear correlation analysis of six groups for position error (included three linear directions and three rotation angle directions), the correlation indexes of DOWN-UP and Y-axis and X-axis were r=0.023 (P>0.05) and r=0.513 (P<0.05), respectively; there were 8 groups positive correlation and 7 groups negative correlation. In the three types of linear data, the change of Y-axis was obvious and its extended separation distance of PTV was within 1.6mm. Conclusion: The analysis of position error by using CyberKnife 6D skull tracking technology which used on brain tumor radiotherapy can effectively monitor and correct the position errors before or during the treatment, and achieve accurate radiotherapy on brain tumors, at the same time, it also provides a reference for corresponding data of clinical intracranial tumors outside PTV.
Six dimensional-skull tracking; Brain tumor; Image guided; Position error; Stereotactic radiotherapy; Cyberknife
1672-8270(2017)03-0032-05
R739.91
A
10.3969/J.ISSN.1672-8270.2017.03.008

2016-11-08
解放军总医院转化医学基金(105059)“新型追踪标记物在立体定向放疗中的研发与应用”
①解放军总医院放疗科 北京 100853
*通讯作者:15801234725@163.com
[First-author’s address] Department of Radiotherapy, Peoples Liberation Army General Hospital, Beijing 100853, China.
猜你喜欢
中老年保健(2022年1期)2022-08-17
核安全(2022年3期)2022-06-29
中国临床医学影像杂志(2022年2期)2022-05-25
中国典型病例大全(2022年9期)2022-04-19
现代仪器与医疗(2021年6期)2022-01-18
现代仪器与医疗(2021年5期)2021-12-02
世界最新医学信息文摘(2021年12期)2021-06-09
实用癌症杂志(2021年12期)2021-02-17
健康必读·下旬刊(2020年2期)2020-03-19
中国医药指南(2019年33期)2020-01-03
