基于MCGS模拟仿真PLC实训设备的设计
2017-05-30 08:40:03卞秀辉
宁波职业技术学院学报 2017年4期
关键词:模拟仿真
卞秀辉

摘 要: 将MCGS组态技术应用到PLC实训项目教学中, 设计开发了模拟仿真PLC实训设备。利用模拟仿真对象代替实物被控模型,有效的节省了教学成本,减轻了实验室管理人员设备维护负担。该系统画面类似于卡通动画形式,趣味性强,能有效提升学生的学习热情。
关键词: PLC; MCGS组态; 模拟仿真
中图分类号: TP 13 文献标志码: A 文章编号: 1671-2153(2017)04-0090-04
0 引 言
可编程控制技术是我院机器人、机电一体化以及相关专业的核心课程,相比较传统的理论讲解式的教学模式,实践环节学生更容易接受和理解,做好PLC实践教学将达到事半功倍的效果。PLC普遍应用于工业现场涉及大量实际工业项目,如果这些项目都采用实物设备,那么将是一笔很大的开销,在设备维护过程中也将耗费大量的人力物力。本文利用MCGS为开发平台,设计开发了PLC模拟仿真实训控制系统,采用MCGS触摸屏作为项目画面运行的载体,根据PLC项目控制要求训练学生的编程调试能力。将组态软件应用到PLC 的教学中,不仅大大降低了教学成本,同时也丰富了实践教学内容。
1 系统硬件结构
整个系统由一台计算机、一个三菱PLC以及一个触摸屏构成,系统总体结构如图1所示。
图1中,PC机主要用于PLC程序的编写调试和下载以及实训控制系统软件的开发维护[1];PLC通过 RS485端口与计算机通信,而计算机一侧端口为RS232电平, RS232/RS485电平转换模块的作用是实现PLC设备和计算机之间的电平转换;触摸屏作为输入输出设备用于显示控制对象的模拟仿真画面,计算机与触摸屏之间采用USB通信方式,学生编写PLC程序并下载到PLC中便可以在触摸屏上看到被控对象的变化。
2 系统软件设计
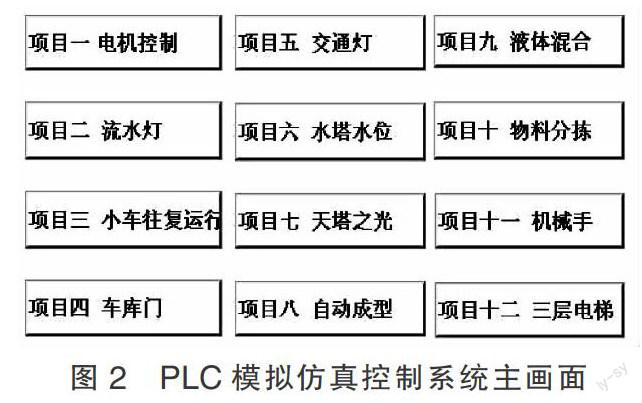
MCGS组态软件是一款用于现场数据采集、上位机监测与控制的应用软件,软件界面操作简单,绘图资源丰富,可驱动的常用设备包括PLC、变频器、数据采集卡、智能仪器等。软件版本包括网络版、通用版和嵌入版,这里采用触摸屏作为运行载体,因此采用嵌入版进行开发设计。利用MCGS组态软件开发的PLC模拟仿真控制系统主画面示意图如图2所示。
图2中,通过系统主画面可以完成12个实训项目的PLC编程调试练习,主要包括电机正反转、能耗制动、异地启停以及交通灯、车库门、物料自动成型加工、液体混合、三层电梯控制等,并且在此基础上可以继续进行项目扩展,丰富项目内容。
MCGS组态应用程序的开发需要开展的工作包括界面设计、变量定义、动画属性设置以及脚本程序编写等,如需连接实际的外部设备则需要添加并建立与外部设备的连接。本文以机械手搬运物块项目为例对上位机控制系统软件设计方法进行详细介绍。
2.1 系统控制要求以及界面开发
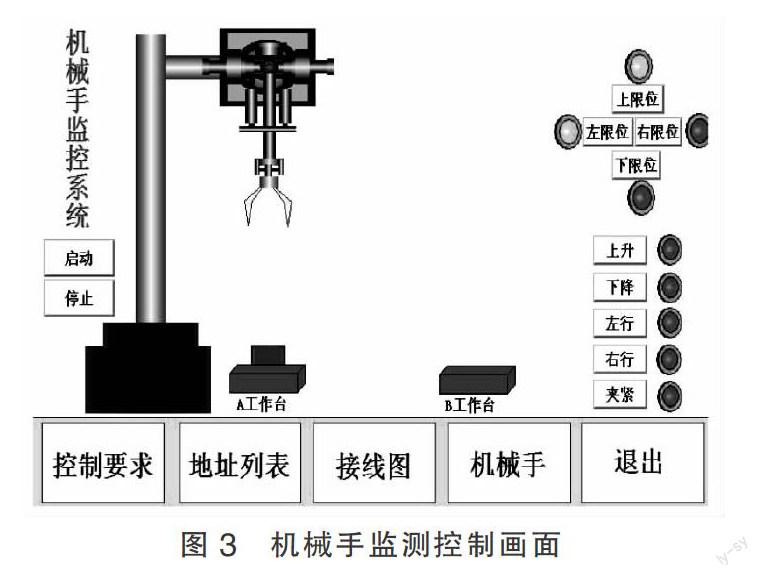
采用MCGS组态软件的绘图工具绘制的机械手监测控制画面如图3所示。图3中,首先需要明确系统控制要求,机械手控制系统初始位置为左限位和上限位行程开关同时压下的状态;启动按钮按下,机械手下降,到达下限位A工作台时机械手夹紧物块,2 s后机械手带动物块上升,到达上限位机械手自动向右运行,碰触到右限位行程开关机械手开始下降,下降到下限位,机械手松开物块将物块放置于B工作台,2 s后机械手继续上升、左行回到原点[2]。
机械手控制系统既可以自动运行也可以手动控制,按下启动按钮机械手自动完成将物块由A工作台搬运到B工作台的过程并自动恢复到初始状态;在画面中上行、下行、左行、右行、夹紧按钮可以手动控制机械手状态并设置了相关的指示灯进行状态显示,当机械手到达限位点时对应的限位点指示灯点亮;该项目有4个画面分别是系统控制要求画面、输入输出地址画面、输入输出接线图画面以及机械手监测控制画面,可以通过点击图3中下方的小窗口进行画面任意切换也可以退出机械手项目。
2.2 创建数据库并建立变量连接
MCGS组态软件创建数据库即定义变量,一种为内存变量另一种为IO变量,内存變量不需要与外部设备进行通信,而IO变量需要在MCGS组态中通过设备窗口添加“三菱PLC通用编程口设备”并将PLC内部寄存器与组态变量建立连接[3],组态应用软件与PLC程序同时运行并进行实时通信,组态程序根据PLC中寄存器状态控制画面动作。机械手项目定义变量如表1所示。
根据机械手项目系统控制要求,系统需要6个输入变量包括“启动”、“停止”、“上限位”、“下限位”、“左限位”和“右限位”,5个输出变量为“上行”、“下行”、“左行”、“右行”、“夹紧”,这些IO变量分别与三菱FX2N系列PLC寄存器相关联。“机械手上升下降距离”和“机械手左右移动距离”为内存变量,其中“机械手上升下降距离”用于机械手以及物块的上升下降动画制作,“机械手左右移动距离”用于机械手以及物块的左行右行动画制作。
实际工程中的机械手系统输入设备连接到PLC的输入X,本系统中PLC控制对象采用组态软件模拟仿真实现,组态软件无法直接控制PLC的输入X,因此在进行PLC程序编写和调试的过程中行程开关和启动、停止按钮的输入都采用中间变量M代替[4]。
2.3 动画设计
动画属性设置是组态控制技术的核心部分,机械手项目中采用了水平移动、垂直移动、大小变化和可见度动画连接。物料块与机械抓手的升降和左右运动分别采用了垂直移动和水平移动动画连接;机械手的伸出和缩回即机械手的上升和下降运动采用了矩形图素的大小变化动画连接[5];机械抓手的松开和夹紧则通过绘制两个抓手,一个是松开状态一个是夹紧状态,采用可见度动画连接同一时刻只能满足表达式条件的一个抓手可见。在组态动画连接设置中针对一个图素可以同时实现水平移动、垂直移动、大小变化以及可见度等多个动画属性设置[6]。机械抓手松开图素的动画组态属性设置如图4所示。
2.4 脚本
脚本程序在组态控制系统中起着重要作用,画面属性窗口中脚本程序包括启动脚本、循环脚本和退出脚本。启动脚本中编写系统变量初始化代码,循环脚本中的代码每间隔一定时间执行一次,间隔时间可以设定,代码可以对变量进行计算以及与PLC进行数据交换[7]。机械手监测控制画面启动脚本编写如下:
左限位=1
上限位=1
循环脚本中包括机械手上升下降部分以及机械手左右运动部分,其中机械手上升下降控制脚本如下:
IF 上升=1 THEN
机械手上升下降距离=机械手上升下降距离-1 //用于完成机械手上升动画
ENDIF
IF 下降=1 THEN
机械手上升下降距离=机械手上升下降距离+1 //用于完成机械手下降动画
ENDIF
IF 机械手上升下降距离<=0 THEN //软件判断是否到达上限位
上限位=1
ELSE
上限位=0
ENDIF
IF 机械手上升下降距离>=50 THEN //软件判断是否到达下限位
下限位=1
ELSE
下限位=0
ENDIF
机械手左右运动控制脚本程序与机械手上升下降程序结构相同,首先检测“右行”变量如果为1,则“机械手左右移动距离”变量加1,如果“左行”变量为1, “机械手左右移动距离”变量减1;当“机械手左右移动距离”变量值大于等于50时,表明机械手运行到最右端,达到右限位点;当“机械手左右移动距离”变量值小于等于0时,证明机械手运行到最左端,达到左限位点。
该项目中PLC外部没有连接实际的继电器、行程开关以及按钮等硬件设备,在循环脚本中利用机械手上升、下降、左行、右行的距离来判断机械手是否运动到限位点,再将限位点的状态传递给PLC从而控制PLC程序运行。
3 PLC教学中的应用
将开发好的组态程序下载到触摸屏中,进入系统主画面,学生根据课堂教学项目点击进入相应的项目画面中,在每个项目画面中学生可以了解项目控制要求,项目中用到的PLC的输入输出对应地址,以及输入输出接线图,根据接线图学生对PLC外围硬件电路有一定的掌握,之后教师布置项目任务一般由简单到复杂,学生利用三菱PLC编程软件编写调试PLC程序并将程序下载到PLC模块中,运行PLC程序并观察触摸屏上项目画面动作变化是否能达到项目任务控制要求,如果不能满足则需要继续改进PLC程序。
4 结束语
采用MCGS组态软件制作模拟PLC控制对象,整个系统硬件结构简单,取代了大量的控制对象实物,很大程度上节约了教学成本;该系统具有很好的扩展性,首先针对于某一个项目教师在教学过程中可设置多个难易程度不同的任务,模拟控制画面同样可以按照运行设计的PLC程序执行动作;其次在以后的教学中扩充实验项目只需添加相应的系统控制程序就可以实现。该系统动画效果精美形象,更能提高学生兴趣,进一步改善教学效果,同时该系统也可以应用于其他课程的项目教学开发中,具有很好的推广性。
参考文献:
[1] 邹伟. 基于MCGS组态软件的上位机控制系统设计[J]. 制造业自动化,2008(1):103-108.
[2] 张伏,王唯. 基于MCGS组态软件的机械手控制系统设计[J]. 机床与液压,2015(21):23-27.
[3] 邢满荣,张鹏. 基于PLC和MCGS組态的机械手控制系统的设计[J]. 制造业自动化,2015(7):11-13
[4] 廖世海. MCGS组态监控软件在PLC教学中的应用[J]. 煤炭技术,2010(11):182-183.
[5] 兰蔚. 基于PLC的教学仿真实验在MCGS组态软件的实现[J]. 工业控制计算机,2009(9):13-14.
[6] 包建华. 基于MCGS组态软件的机械手控制系统研制[J]. 机械制造与自动化,2007(5):140-141.
[7] 刘力. 组态软件在PLC实验系统中的应用[J]. 实验室研究与探索,2014(4):127-129,136.
猜你喜欢
江苏农业科学(2017年1期)2017-02-27 14:49:13
科技创新与应用(2016年36期)2017-02-21 19:19:12
科技视界(2016年13期)2016-06-13 00:26:23
考试周刊(2016年22期)2016-05-06 19:14:34
科技资讯(2015年8期)2015-07-02 20:39:56