
柔性多端直流的智能分布调控
2017-05-23 06:13:56刁晓伟
电力自动化设备 2017年11期
高 扬,艾 芊,刁晓伟,高 波
(1.上海交通大学 电子信息与电气工程学院,上海 200240;2.上海市绿色能源环保有限公司,上海 200433;3.国网株洲供电公司,湖南 株洲 412000)
0 引言
风速、光照等天气条件的随机性和难预测性,大幅增加了新能源的调度和并网控制难度。传统的高压直流输电系统因具有电压等级高、响应速度快、传输容量大、线损低等优点,已广泛应用于远距离、大容量等输电场合[1-4]。相较于传统的高压直流输电,柔性直流输电更适用于常规的交流电网异步互联以及远距离输电,而且可以同时改善所联交流电网的电能质量。柔性直流换流站具有有功、无功解耦控制的优良特性,在交流系统故障时可以快速发出无功,帮助交流系统恢复稳定,且不增加交流电网的短路电流,不受交流系统短路容量限制,不存在换相失败的问题。
然而,各换流站功率的合理分配及直流母线电压控制的质量却直接影响多端直流输电系统运行的可靠性和稳定性[5-7]。目前针对柔性多端电网的直流电压控制可分为有无通信两大类。带通信的控制方式主要有主从控制方式,它需要上层控制器的协调;无通信的控制方式没有上层控制器,主要有基于直流电压偏差控制的多点直流电压控制方式、带电压下降特性的控制方式等[8-9],但是这些控制方式下直流电压控制质量差,且因为缺少上层协调,无法保证系统在故障或大扰动情况下的稳定以及最优控制。
近年来,多智能体技术日趋成熟,为柔性直流电网的协调控制提供了一种新的途径。多智能体系统通常包括2个及以上的智能体,每个智能体都是典型的知识实体,具有自主性、社会能力、反应性、目标导向及主动性等特点。智能体之间以及智能体与系统间通过交互、协调实现群体妥协解。
基于以上分析,本文首先探讨了柔性多端直流电网的典型结构,并详细研究了各端子的运行控制策略;然后提出基于柔性多端直流智能调控的实现途径,即在每个端子都设置一个智能体,从而构成多智能体系统,分析了通信拓扑结构对多智能体协调控制的影响;最后,通过搭建一个典型的四端柔性直流输电系统进行仿真,验证了该控制策略的有效性和合理性。
1 柔性多端直流电网系统结构
图1是一个典型的四端柔性直流电网。交流电网1采用定直流电压控制,负责维持整个系统的稳定运行;交流电网2和4根据电网的优化调度指令,采取定有功功率方式实现功率的合理分配[10-13];交流电网3可以连接风电场,汇集风电功率。
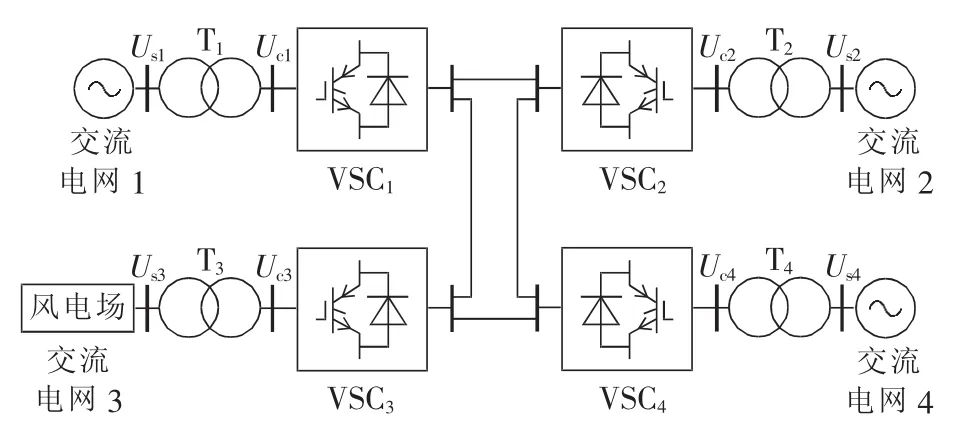
图1 典型的四端柔性直流电网Fig.1 Typical structure of four-terminal flexible DC power grid
2 柔性多端直流电网控制策略
柔性多端直流电网发生功率波动时,如果系统中只存在1个主换流站,无法使系统达到功率平衡,会导致交流侧电网的频率发生振荡,使具有调节能力的换流站都参与系统的功率调节,可减小与之相连的交流侧电网频率波动。本文借鉴交流电网中调频器的控制思路,采用改进的定有功功率下垂控制策略,根据图2所示的P-V特性关系曲线来提高换流站的功率调节能力,并实现定直流电压控制[14-15]。
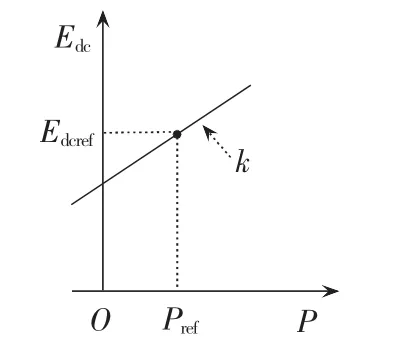
图2 有功功率和直流母线电压特性曲线Fig.2 Characteristic curve of active power and DC bus voltage
图2中,k为P-V关系曲线的斜率;Edcref为换流站直流母线电压的参考值;Pref为换流站有功功率的参考值。则换流站有功功率和直流母线电压的特性关系表示如下:

当直流系统中产生功率波动ΔP时,第i个具有P-V下垂关系特性的换流站工作平衡点会由(Edcref,Pref)变为,则 ΔPi=P*-Pref,直流母线的电压变化如下:

则系统总的功率波动ΔP为:

参与功率调节的换流站功率变化为:

可见,各直流换流站的功率调节能力由P-V关系曲线的斜率k的大小决定。ki越大,功率调节能力越弱;ki越小,则功率调节能力越强。通常情况下,换流站的容量和斜率ki的大小呈反比关系。
3 基于多智能体系统的通信结构设计
3.1 多智能体系统
多智能体系统由若干个智能体组成,其中每个智能体都有自己的动态控制器。在柔性多端直流电网中,每个智能体设置在不同的换流站处,有各自的控制目标,可以获取本地或者邻近智能体的状态信息。考虑到智能体的通信延迟td,智能体i的直流电压参考值可表示如下:
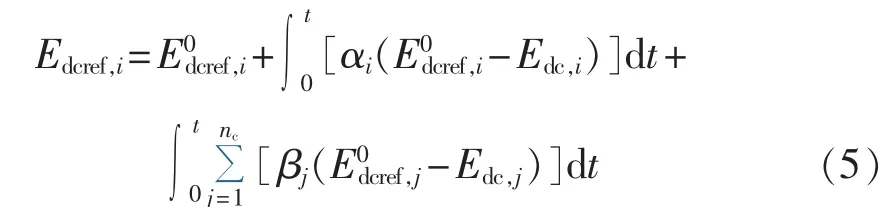
其中,nc为参与控制的智能体的数量;E0dcref,i为智能体 i的初始参考电压值;αi、βj为常数,是智能体 i以及其他智能体对智能体i控制的影响因子。如果智能体之间没有通信,则βj=0,表示受控对象只受本地智能体控制。当出现故障时,式(5)能自动更新换流站直流参考电压值。多智能体控制系统的结构如图3所示。
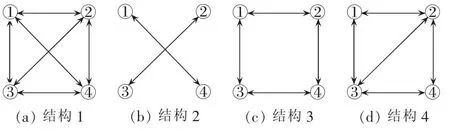
图3 多智能体系统通信系统架构Fig.3 Communication system structure of multi-agent system
多智能体之间进行协调控制通常存在一定的通信延迟,该延迟会影响多智能体系统的控制效果。基于奈奎斯特稳定性判据可知,如果最大通信延迟时间τmax不超过π/(2ηmax)时,则整个多智能体系统的分布式控制算法依然收敛,其中ηmax为拉普拉斯矩阵L的最大特征根,其值越大,则多智能体系统的通信延时容忍度就越小[16]。
本文针对图1所示柔性多端直流系统的物理架构,设计了4种典型的多智能体通信系统结构,对应各结构的特性参数如表1所示。本文采用图3(a)或(d)所示的通信系统结构,可减小多智能体系统分布式控制的通信延时时间。
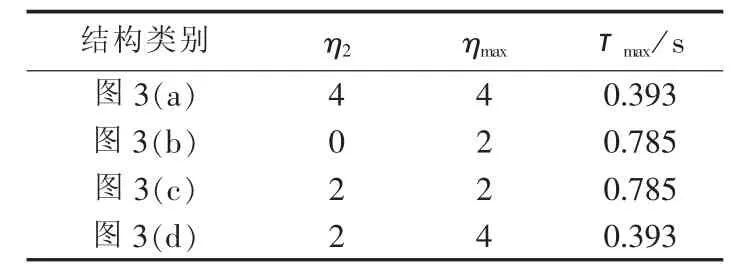
表1 各通信系统结构特性参数Table 1 Parameters of each communication system structure
图3中实线连接表示2个智能体间可进行通信,其余情况则表示无通信。其邻接矩阵A和对角矩阵D可以分别求得:
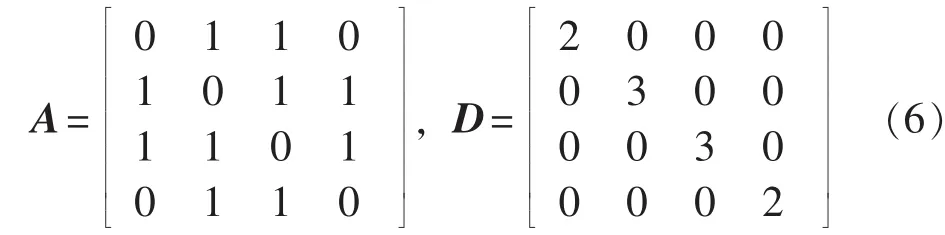
进而可求出拉普拉斯矩阵L为:
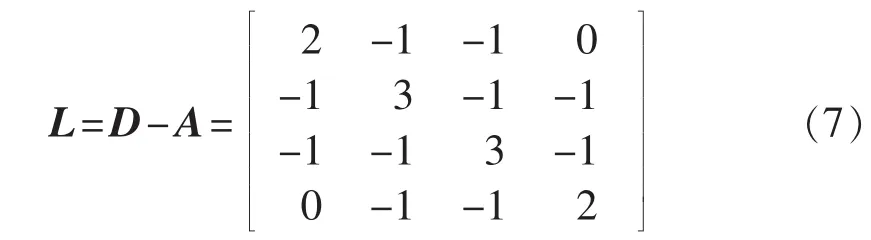
由式(7)可最终求得拉普拉斯矩阵L的特征值为:η1=0,η2=2,η3=η4=4。 则这种通信拓扑下的系统通信延迟时间为:

3.2 多智能体智能分布调控策略
以四端柔性直流输电系统为例,对多智能体的分布调控策略进行说明,如图4所示。当系统功率平衡时,各换流站智能体稳定运行在A点,直流母线电压的参考值为Edcref。根据功率调节能力的不同,将各换流站智能体进行分类。假定换流站VSC3是第一类智能体,输入功率为 P0+P1;换流站 VSC2、VSC4作定有功功率控制,是第二类智能体,有功功率参考值分别为Pref2=-k2P1和 Pref4=-k4P1;换流站 VSC1吸收功率为P0,作定直流电压控制,是第三类智能体。当换流站VSC3连接的风电场输入系统的功率变化为P0+P1+ΔP时,系统检测到功率波动为ΔP,此时调整第二类换流站智能体VSC2和VSC4的功率,令Pref2=-k2P1-k2ΔP,Pref4=-k4P1-k4ΔP,补偿系统功率不平衡。 而此时换流站VSC1智能体控制模式则保持不变,系统运行点由A点平稳地过渡到B点,系统电压Edcref保持不变,对换流站VSC1智能体而言,A点和B点重合。
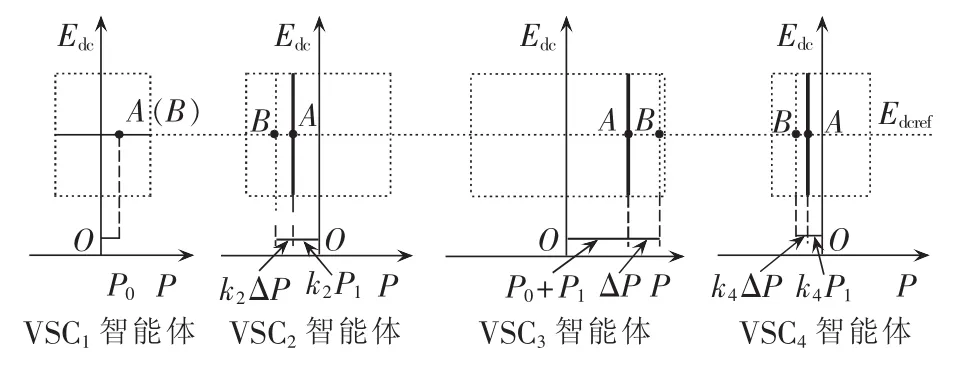
图4 多智能体智能分布调控原理示意图Fig.4 Schematic control principle of intelligent distributed control for multi-agent system
斜率k2和k4的取值大小取决于与之相连的交流电网强弱,如果连接的是强交流电网,则ki取较大的值,最大可取到1。若换流站VSC2或VSC4智能体由于故障退出,ki则取为0,然后调整其余换流站的功率调节系数ki,直至换流站恢复正常值时再恢复相应的ki值。若换流站智能体所连接的交流电网状态发生改变,能够随时调节其对应的ki值,增加或减少其功率补偿的大小。
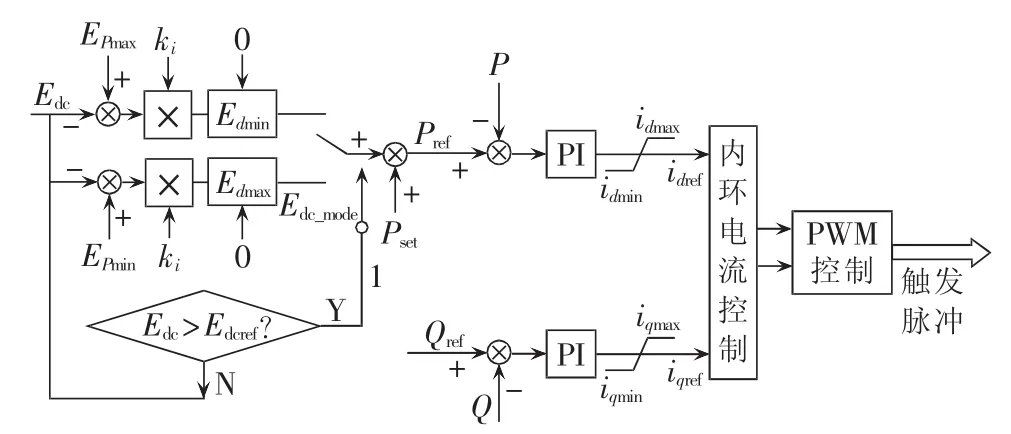
图5 多智能体的智能分布调控示意图Fig.5 Schematic diagram of intelligent distributed controllers based on multi-agent system
根据上述多智能体智能分布调控策略,设计如图5所示的控制框图,既可实现定有功功率控制,又可维持系统直流母线电压的稳定。图中,Pref为定功率控制换流站智能体的有功功率参考值。逻辑判断模块中,若 Edc>Edcref,则控制模式 Edc_mode=1,作定功率控制的换流站智能体VSC2和VSC4工作于OA段;若Edc<EPmax,则只需单一的主换流站VSC1作定直流电压控制,维持系统的功率平衡。若系统中负荷需求减小时,直流母线电压上升,EPmax<Edc<Edmax,VSC1达到功率极限,作定功率控制的换流站VSC2和VSC4会共同承担系统中功率波动,工作于AB段。若系统中出现换流站故障时,直流母线电压继续上升,Edc>Edmax,则定有功功率控制的换流站VSC2和VSC4会立即变为定直流电压控制,维持系统电压稳定。当系统故障切除后,Edc<EPmax时,定有功功率控制的换流站VSC2和VSC4会从定直流电压控制工作模式中恢复为定功率控制,由VSC1作定直流电压控制,直到系统电压恢复。
4 仿真验证与分析
根据图1所示四端柔性直流电网,利用PSCAD/EMTDC仿真软件验证基于多智能体的智能分布调控策略。整个直流系统最初稳定运行的状态为:VSC1采取定直流电压控制,换流站VSC2、VSC4采取定功率控制,换流站VSC3跟踪最大风能。各换流站智能体参考电压设置为Ed2,min
a.稳定运行时,根据系统中换流站的功率调节能力,可知VSC3为第一类换流站,VSC2和VSC4为第二类换流站,Pref2=-300 MW,Pref4=-100 MW,VSC1为第三类换流站,Edcref=1.0 p.u.。t=5 s时风速由10 m/s上升为13m/s,风电场换流站VSC3发生功率波动,换流站VSC1工作状态保持不变,由VSC2和VSC4进行功率调整,设定功率调节系数k2和k3均为0.5,满足功率波动。风功率波动情况下的智能分布调控效果如图6所示(U为标幺值)。
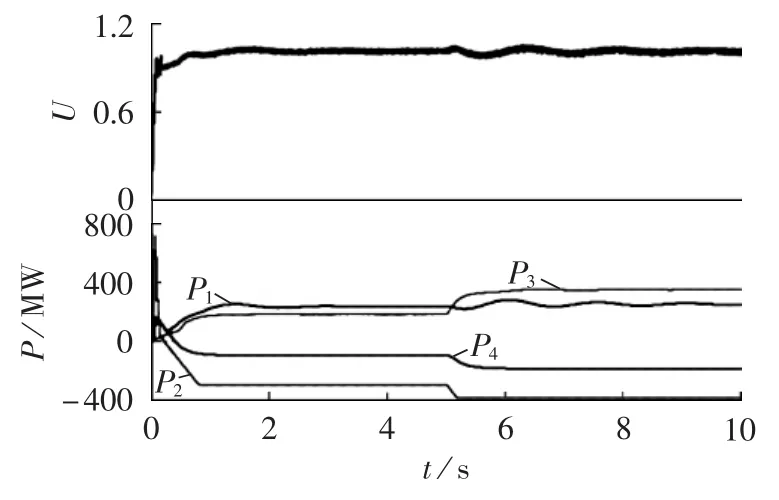
图6 风功率波动情况下的智能分布调控效果Fig.6 Performance of intelligent distributed control for wind power fluctuations
b.若换流站 VSC1发生故障,此时 VSC2、VSC3、VSC4处功率由直流电网向交流电网吸收有功功率,分别为-55 MW、-95 MW、-280 MW,维持系统的功率平衡和直流母线电压稳定。4.5 s时,VSC1智能体故障退出,则系统中有功过剩,直流母线电压上升,VSC4智能体接收到直流电网电压变化信号,迅速切换为定直流电压控制的工作模式。由于换流站VSC4容量充足,此时,VSC4智能体向直流电网智能体上传状态信息,VSC4智能体在5 s时接收到直流电网智能体的调节信息,将换流站直流母线电压重新调整为120 kV。此时的智能分布调控效果如图7所示。
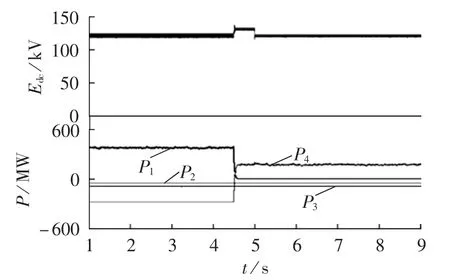
图7 VSC1故障退出情况下的智能分布调控效果Fig.7 Performance of intelligent distributed control for excitation of VSC1
c.设多智能体系统在进行分布式协调控制时,通信系统发生故障。如图8所示,假设风速在t=5 s时由8m/s上升为11m/s,而在t=11s时,又从11m/s降低为9 m/s;t=7 s时,发生通信系统故障,不能接收到t=11s时的风电场功率波动信号,则不能对VSC2和VSC3的P-V下垂曲线斜率参考值ki进行修正,故只能由换流站VSC1承担功率不平衡。在通信系统恢复正常前,类似于单一主站的主从控制,系统仍能维持稳定运行。
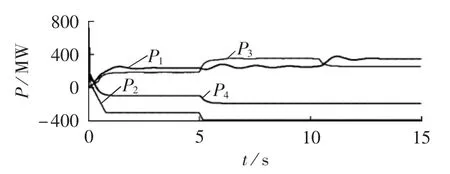
图8 通信系统故障情况下的智能分布调控效果Fig.8 Performance of intelligent distributed control for communication failure
5 结论
本文提出基于多智能体系统的柔性多端直流电网智能分布调控策略,该策略具有分布式计算的智能性、实时性、共享性等特点。在系统发生故障或者功率不平衡情况下,本地换流站智能体既可以根据环境的突变自我判断,快速更改为合适的控制方式,也可以接收来自上级电网智能体的协助请求,帮助相邻智能体,维持系统的功率平衡和电压稳定。仿真结果表明,该策略能够提高整个系统的直流电压质量,削弱由于功率波动引起的电压主站端的功率振荡现象,且在电压主站故障退出运行和通信故障情况下,系统依然能保持稳定运行。
参考文献:
[1]王一振,赵彪,袁志昌,等.柔性直流技术在能源互联网中的应用探讨[J]. 中国电机工程学报,2015,35(14):3551-3560.WANG Yizhen,ZHAO Biao,YUAN Zhichang,et al.Study of the application of VSC-based DC technology in energy internet[J].Proceedings of the CSEE,2015,35(14):3551-3560.
[2]马为民,吴方劼,杨一鸣,等.柔性直流输电技术的现状及应用前景分析[J]. 高电压技术,2014,40(8):2429-2439.MA Weimin,WU Fangjie,YANG Yiming,et al.Flexible HVDC transmission technology’s today and tomorrow[J].High Voltage Engineering,2014,40(8):2429-2439.
[3]付媛,王毅,张祥宇,等.多端电压源型直流系统的功率协调控制技术[J]. 电力自动化设备,2014,34(9):130-136.FU Yuan,WANG Yi,ZHANG Xiangyu,et al.Coordinated power control of VSC-MTDC system[J].Electric Power Automation Equipment,2014,34(9):130-136.
[4]洪敏,辛焕海,徐晨博,等.海上风电场与柔性直流输电系统的新型协调控制策略[J]. 电力系统自动化,2016,40(21):53-58.HONG Min,XIN Huanhai,XU Chenbo,et al.Coordinated control strategy of offshore wind farms and VSC-based HVDC transmission systems[J].Automation of Electric Power Systems,2016,40(21):53-58.
[5]朱瑞可,李兴源,应大力.VSC-MTDC互联系统频率稳定控制策略[J]. 电网技术,2014,38(10):2729-2734.ZHU Ruike,LI Xingyuan,YING Dali.A frequency stability control strategy for interconnected VSC-MTDC transmission system [J].Power System Technology,2014,38(10):2729-2734.
[6]吴方劼,马玉龙,梅念,等.舟山多端柔性直流输电工程主接线方案设计[J]. 电网技术,2014,38(10):2651-2657.WU Fangjie,MA Yulong,MEI Nian,et al.Design of main connection scheme forZhoushan flexible multi-terminalHVDC transmission project[J].Power System Technology,2014,38(10):2651-2657.
[7]彭衍建,李勇,曹一家.基于VSC-MTDC的大规模海上风电并网系统协调下垂控制方法[J]. 电力自动化设备,2016,36(8):16-25.PENG Yanjian,LI Yong,CAO Yijia.Coordinated droop control for large-scale offshore wind farm grid-connected based on VSCMTDC system[J].Electric Power Automation Equipment,2016,36(8):16-25.
[8]EGEA-ALVAREZ A,BIANCHI F,JUNYENT-FERRÉ A,et al.Voltage control of multiterminal VSC-HVDC transmission systems for offshore wind power plants:design and implementation in a scaled platform[J].IEEE Transactions on Industrial Electronics,2013,60(6):2381-91.
[9]张海波,袁志昌,赵宇明,等.VSC-MTDC系统变截距直流电压下垂控制策略[J]. 电力自动化设备,2016,36(10):60-64.ZHANG Haibo,YUAN Zhichang,ZHAO Yuming,et al.Variable intercept DC-voltage droop control for VSC-MTDC system [J].Electric Power Automation Equipment,2016,36(10):60-64.
[10]阎发友,汤广福,贺之渊,等.基于MMC的多端柔性直流输电系统改进下垂控制策略[J]. 中国电机工程学报,2014,34(3):397-404.YAN Fayou,TANG Guangfu,HE Zhiyuan,et al.An improved droop control strategy for MMC-based VSC-MTDC systems[J].Proceedings of the CSEE,2014,34(3):397-404.
[11]刘瑜超,武健,刘怀远,等.基于自适应下垂调节的VSC-MTDC功率协调控制[J]. 中国电机工程学报,2016,36(1):40-48.LIU Yuchao,WU Jian,LIU Huaiyuan,et al.Effective power sharing based on adaptive droop control method in VSC multiterminal DC grids[J].Proceedings of the CSEE,2016,36(1):40-48.
[12]韩永霞,何秋萍,赵宇明,等.采用柔性直流技术的智能配电网接入交流电网方式[J]. 电力系统自动化,2016,40(13):141-146.HAN Yongxia,HE Qiuping,ZHAO Yuming,et al.Access mode of intelligent distribution network to AC network based on flexible DC technology[J].Automation of Electric Power Systems,2016,40(13):141-146.
[13]周密,徐箭,孙元章.多端柔性直流电网平抑风电波动的协调控制策略[J]. 电力自动化设备,2016,36(12):29-35.ZHOU Mi,XU Jian,SUN Yuanzhang.Coordinated control restraining wind power fluctuation of VSC-MTDC[J].Electric Power Automation Equipment,2016,36(12):29-35.
[14]熊凌飞,韩民晓.基于组合方式的多端柔性直流输电系统控制策略[J]. 电网技术,2015,39(6):1586-1592.XIONG Lingfei,HAN Minxiao.A novel combined control strategy for VSC-MTDC[J].Power System Technology,2015,39(6):1586-1592.
[15]罗永捷,李耀华,王平,等.多端柔性直流输电系统直流电压自适应下垂控制策略研究 [J]. 中国电机工程学报,2016,36(10):2588-2599.LUO Yongjie,LI Yaohua,WANG Ping,et al.DC voltage adaptive droop control of multi-terminal HVDC systems[J].Proceedings of the CSEE,2016,36(10):2588-2599.
[16]BABAZADEH D,NAZARI M,FIDAI M H,et al.Implementation of agent-based power flow coordination in AC/DC grids using cosimulation platform[C]∥International Conference on Smart Grid Communications. [S.l.]:IEEE,2015:188-193.
[17]季一润,袁志昌,赵剑锋,等.一种适用于柔性直流配电网的电压控制策略[J]. 中国电机工程学报,2016,36(2):335-341.JI Yirun,YUAN Zhichang,ZHAO Jianfeng,et al.A suitable voltage control strategy for DC distribution power network[J].Proceedings of the CSEE,2016,36(2):335-341.
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
通信电源技术(2018年3期)2018-06-26 08:06:20
湖北电力(2016年8期)2016-05-09 09:03:08
湖北电力(2016年8期)2016-05-09 09:03:06
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年5期)2015-04-09 11:30:46
机电信息(2015年6期)2015-02-27 15:55:01
