基于扰动观测和补偿的PMSM伺服系统位置跟踪控制
2017-05-15 02:23:55邹权钱林方
电机与控制学报 2017年5期
邹权, 钱林方
(南京理工大学 机械工程学院,江苏 南京 210094)
基于扰动观测和补偿的PMSM伺服系统位置跟踪控制
邹权, 钱林方
(南京理工大学 机械工程学院,江苏 南京 210094)
针对存在参数摄动和外部扰动力矩的PMSM伺服系统位置跟踪控制问题,提出一种基于扰动观测和补偿的滑模控制方法。采用扰动观测器估计系统参数摄动以及负载力矩,并在此基础上对等效扰动进行补偿,减小了模型不确定性对系统控制性能影响,系统的位置跟踪误差由0.85 rad减小到0.35 rad;在保证系统稳定性的前提下,去除了常规滑模控制中的不连续控制项,有效地减小了抖振。实验结果表明,与工程上常用的PID算法相比,基于扰动观测和补偿的滑模控制算法不仅能够显著提高PMSM伺服系统的位置跟踪精度,而且能有效地削弱抖振。
PMSM;跟踪控制;滑模控制;扰动观测;抖振
0 引 言
永磁同步电机(permanent magnet synchronous motor,PMSM)具有效率高、转矩脉动小、功率密度大、结构紧凑等特点,在中小惯量高精度伺服系统中得到了广泛应用。工程上,一般采用矢量控制技术[1-2]实现PMSM的解耦控制,但其控制性能仍然受到参数摄动和负载力矩扰动等模型不确定性的影响。目前,处理模型不确定性的方法主要有自适应控制[3],自抗扰控制[4],重复学习控制[5],H∞最优控制[6]等。滑模控制(sliding mode control,SMC)具有结构简单、对被控系统参数变化及外部扰动不敏感等特点,在电机伺服系统中得到了广泛地应用,并且取得了较好地应用效果[7-9]。限制滑模控制在实际工程中应用的主要是“抖振”问题,目前,消除或削弱抖振的方法主要有边界层法[10],控制信号滤波法[11],动态滑模方法[12]以及与模糊数学、神经网络等智能控制算法相结合[13-14]、扰动观测器(disturbance observer,DOB)[15-18]等方法。在扰动观测器法中,利用DOB估算系统参数摄动和外部扰动等模型不确定性并采取一定的补偿措施,是解决抖振问题的一种有效手段。文献[15]采用DOB实现了电机速度伺服系统惯量和粘性摩擦系数的在线估计和补偿,取得了较好的应用效果。文献[16]通过DOB估算系统的非匹配不确定性并进行补偿,实现了一类非匹配不确定性系统的滑模控制,有效地减小了抖振。文献[17]采用滑模观测器估计LuGre摩擦模型的内部状态,然后通过在线补偿措施改善了系统的控制性能。文献[18]利用DOB技术实现了一类非线性系统的扰动补偿,虽然减小了切换项增益,但控制率仍然是非连续的。
本文在文献[15-18]的基础上,针对PMSM伺服系统的位置跟踪控制问题,提出了一种基于扰动观测和补偿的滑模控制(disturbance observation and compensation based sliding mode control,SMC-DOB)算法。首先采用DOB在线估计系统参数摄动和外部扰动力矩;然后通过补偿技术减小其对系统控制性能的影响,在保证系统稳定性的基础上去除了常规滑模控制中的不连续控制项,有效地消除了抖振;最后,通过实验验证了算法的有效性。
1 数学建模及问题描述
当采用id=0的矢量控制技术时,PMSM的转矩方程[7,9]可以写为
Te=1.5pnψfiq=KTiq。
(1)
式中:Te为电机的电磁转矩,N·m;pn(n=1,2,3,…)为电机的极对数;ψf为电机永磁体产生的磁链,Wb;iq为q轴电流,A;KT= 1.5pnψf为电机转矩常数,N·m/A。
PMSM伺服系统的动力学方程为
(2)
式中:J为等效转动惯量,kg·m2;B为等效黏性摩擦系数,N·m·s/rad;θ为转子角位移,rad;Tl为负载力矩,N·m,包括外部扰动,非线性库伦摩擦以及其他难以建模的动态等。
由式(1)和式(2)化简可得
(3)
式中:u=iq为控制作用;Ap=J/KT;Bp=B/KT;Dp=1/KT。
当系统参数发生变化时,式(3)可改写为
(4)

|Td| <δ。
(5)
式中|*|表示*的绝对值。
对于给定的参考信号θd,假设其一阶和二阶导数有界且连续。本文研究的问题是:对于PMSM伺服系统式(4),其中等效扰动之和Td满足式(5),设计有界的控制输入u,使得θ能够跟踪θd,并且跟踪误差尽量小。
2 控制器设计
由式(4)整理可得
(6)

(7)
定义如下的扰动观测器[16,18]:
(8)
式中:z为扰动观测器的内部状态;L为待定的观测器增益且L> 0。注意到式(6)和式(8),式(7)对时间求导可得
(9)
必须指出的是,扰动观测器的目的是减小模型不确定性的上界,进而减小或去除常规滑模控制中不连续控制项,以达到减小或消除抖振的目的,因此不需要其估计误差为零。
定义系统的位置跟踪误差及其导数为:
(10)
取如下的滑模函数
(11)
式中λ为待定的控制器参数,λ>0。
基于扰动观测和补偿的滑模控制律取为
(12)

(13)
其中:ε0>0,ε1>0为未知的常数。
滑模函数式(11)对时间求导,并把式(12)带入可得
(14)
取如下的Lyapunov函数
V=s2/2。
(15)
式(15)对时间求导,并把式(13)和式(14)带入可得
(16)
由式(16)可得
(17)
式中:V(0)为V(t)的初值;λV=2ε0/Apn。
由式(17)可知,V(t)有界且以指数速率λV收敛至ε1/(4ApnλV),其收敛速度和终值可由ε0和ε1调整。即ε0取值越大,V(t)的收敛速度越快,反之亦然;同样,当ε1取值越小,系统的稳态跟踪误差e越小,反之亦然。然而,值得注意的是,由式(13)可知,当ε0取值越大且ε1取值越小,即V(t)的收敛速度快且系统的稳态跟踪误差小时,控制器参数k的取值越大。对于实际的控制系统来说,过大的控制器参数k将会导致系统不稳定,因此,控制器参数k的取值范围与实际系统的配置有关,可以通过多次实验的方法来确定。此外,由于V(t)有界,故滑模函数s和跟踪误差e有界,进而由式(12)可知控制输入u有界,故系统所有信号有界。
3 实验验证
某PMSM伺服控制系统如图1所示,PMSM由工作在力矩模式下的SolGui 35/60伺服驱动器控制,电流环采样周期0.1 ms。控制算法由高性能控制器CP 3485执行,采样周期0.4 ms。CP 3485与SolGui 35/60通过CANopen网络通信,波特率为500 Kbps。PMSM主轴编码器经4倍频后每转输出10 000个脉冲。
系统标称参数为Apn=7.19×10-3As2/rad,Bpn=1.12×10-3As/rad。参考信号如图2所示,位移为600 rad,最大速度为300 rad/s,最大加速度为600 rad/s2。
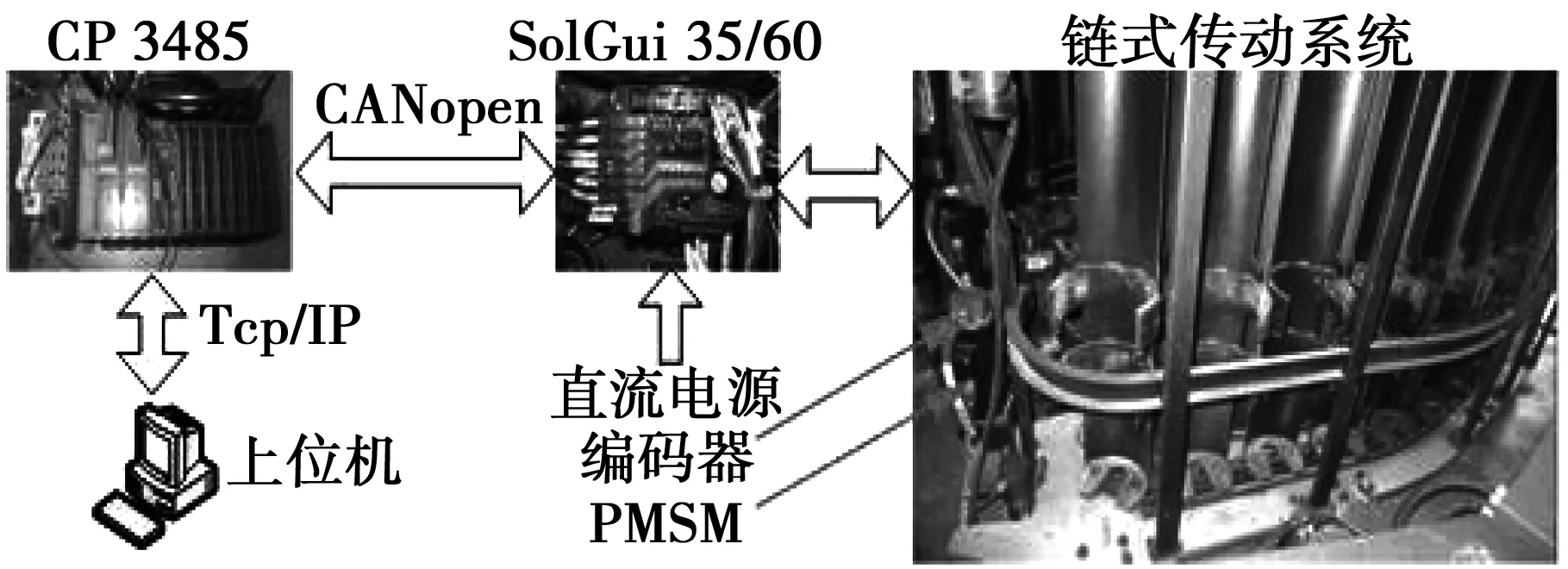
图1 PMSM伺服系统示意图Fig.1 Diagram of PMSM servo system

图2 参考信号Fig.2 Reference signals
为了比较,考虑如下的PID算法
(18)
考虑到系统的稳定性和跟踪精度,通过多次试验确定PID控制算法式(18)的参数为:Kp=25、KI=15、KD=0.5。如果进一步提高PID控制器的增益,虽然能够减小跟踪误差,但会引起比较严重的抖振,严重的抖振会加剧系统磨损,显著减小系统寿命,这在工程上是不允许的。SMC-DOB控制器参数设置为:L=25,λ=4;为了保证系统的稳定性,控制器参数k的取值应满足式(13),但k取值过大会引起严重的抖振。为了简单,本文在同时考虑系统跟踪精度和系统稳定性的情况下,通过多次试验确定控制器参数k的取值为1.5。
实验结果如图3~图6所示,其中图3和图4分别为PID算法的跟踪误差和控制输入,图5和图6分别为SMC-DOB算法的跟踪误差和控制输入。
由图3和图5可以看出,SMC-DOB算法的最大位置跟踪误差约为0.35 rad,而PID算法的最大位置跟踪误差约为0.85 rad,位置跟踪精度有较为明显的提升。此外,由于摩擦力矩等非线性因素的存在,PID算法存在较大的稳态误差,约为0.3 rad,且稳态误差消除较慢(图3中4.5 s以后的曲线),如果增大积分项增益,虽然能够进一步减小稳态误差,但有可能引起系统不稳定;而SMC-DOB算法中扰动观测器能够补偿部分非线性摩擦力矩,因此具有较小的稳态误差,约为0.2 rad,且稳态误差消除较快(图5中4.5 s以后的曲线)。由图4和图6可以看出,SMC-DOB算法和PID算法都出现了不同程度的抖振,但SMC-DOB的抖振更小。

图3 PID跟踪误差Fig.3 Tracking error of PID

图4 PID控制输入Fig.4 Control effort of PID

图5 SMC-DOB跟踪误差Fig.5 Tracking error of SMC-DOB

图6 SMC-DOB控制输入Fig.6 Control effort of SMC-DOB

图7 估计值
4 结 论
本文针对存在参数摄动和外部扰动力矩的PMSM伺服系统的位置跟踪控制问题,提出了一种基于扰动观测和补偿的滑模控制方法。采用扰动观测器在线估计系统参数摄动和负载力矩,实现了模型不确定性的在线补偿。在扰动观测器的设计中,观测器增益L的选择对系统控制性能有较大的影响,如果L的取值过小,对系统性能改善效果不明显,而取值过大会对系统稳定性造成不利影响,一般情况下,为了简单可采用多次试验确定其取值。通过扰动观测器技术在线补偿等效扰动,不仅减小了模型不确定性对控制性能的影响,提高了系统的动态以及稳态跟踪精度,而且在保证系统稳定性的前提下,去除了常规滑模控制中的不连续控制项,有效地减小了抖振。此外,值得注意的是,控制器参数k的取值大,则系统的位置跟踪误差收敛速度快且跟踪误差小,但系统的稳定性较差;反之,k的取值小则系统稳定性较好,但系统的位置跟踪误差收敛速度较慢且跟踪误差较大。因此,在实际工程中,控制器参数k的选取应兼顾系统稳定性和跟踪精度,以达到满意的控制效果。
[1] VAS P.Vector control of AC machines[M].New York:Oxfo-rd University Press,1990.
[2] BAE B H,SUL S K,KWON J H,et al.Implem-entation of sensorless vector control for super-high-speed PMSM of turbo-compressor[J].IEEE Trans-action on Industrial Applications,2003,39(3): 811-818.
[3] HIDEKI Y,KAZUMASA F.Adaptive control of an electrohydraulic servo system utilizing online esti-mate of its natural frequency[J].Mechatronics,20-07,17: 337-343.
[4] 雷春林,吴捷,陈渊睿,等.自抗扰控制在永磁直线电机控制中的应用[J].控制理论与应用,2005,22(3): 423-428. LEI Chunlin,WU Jie,CHEN Yuanrui,et al.Auto-disturbance-rejection controller used in permanent magnet linear motor control system[J].Control Theory and Applications,2005,22(3): 423-428.
[5] DING H,WU J.Point-to-point motion control for a high-acceleration positioning table via cascaded l-earning schemes[J].IEEE Transactions on Industri-al Electronics,2007,54(5):2735-2744.
[6] LIU Z Z,LUO F L,RAHMAN M A.Robust and precision motion control system of linear motor direct drive for high-speed XCY table positioning mechanism[J].IEEE Transactions on Industrial El-ectronics,2005,52(5): 1357-1363.
[7] 王旭东,李鑫 ,周凯,等.一种永磁同步电机总谐波电流抑制方法[J].哈尔滨理工大学学报,2016,21(5):51-55. WANG Xudong,LI Xin,ZHOU Kai,et al.A permanent magnet synchronous motor total harmoniccurrent suppression method[J].Journal of Harbin University of Science and Technology,2016,21(5):51-55.
[8] 张碧陶,皮佑国.永磁同步电机伺服系统模糊分数阶滑模控制[J].控制与决策,2012,27(12): 1776-1780. ZHANG Bitao,PI Youguo.Fractional order fuzzy sliding mode control for permanent magnet synchr-onous motor servo drive[J].Control and Decision,2012,27(12): 1776-1780.
[9] 苗壮,武俊峰,王显博.吊舱式推进器中的伺服电机控制[J].哈尔滨理工大学学报,2015,20(3):51-55. MIAO Zhuang,WU Junfeng,WANG Xianbo.Servo motor control of the podded thruster[J].Journal of Harbin University of Science and Technology,2015,20(3): 51-55.
[10] CHEN M S,HWANG Y R,TOMIZUKA M.A st-ate dependent boundary layer design for sliding m-ode control[J].IEEE Transactions on Automatic Control,2002,47(10): 1677-1681.
[11] KANG B P,JU J L.Sliding mode controller with filtered signal for robot manipulators using virtual plant/controller[J].Mechatronics,1997,7(3): 277-286.
[12] BARTOLINI G,PISANO A,PUNTA E,et al.A survey of applications of second order sliding mod-e control to mechanical systems[J].International Journal of Control,2003,76(9): 875-892.
[13] WAI R J,SU K H.Adaptiveenhanced fuzzy slidi-ng mode control for electrical servo drive[J].IEEE Transactions on Industrial Electronics,2006,53(2): 569-580.
[14] TERESA O K,MATEUSZ D,KRZYSZTOF St.A-daptive sliding-mode neurofuzzy control of the tw-o mass induction motor drive without mechanicalsensors[J].IEEE Transactions on Industrial Electro-nics,2010,57(2): 553-564.
[15] HUANG W S,LIU C W,HSU P L,et al.Precisi-on control and compensation of servomotors and machine tools via the disturbance observer[J].IEEE Transactions on Industrial Electronics,2010,57(1): 420-429.
[16] YANG J,LI S H,YU X H.Sliding mode control for systems with mismacthed uncertainties via adisturbance observer[J].IEEE Transactions on Ind-ustrial Electronics,2013,60(1):160-169.
[17] XIE W F.Sliding-mode-observer-based adaptive co-ntrol for servo actuator with friction[J].IEEE Transactions on Industrial Electronics,2007,54(3): 1517-1527.
[18] CHEN M,CHEN W H.Sliding mode control for a class of uncertain nonlinear system based on dis-turbance observer[J].International Journal of Ada-ptive Control and Signal Processing,2010,24(1):51-64.
Disturbance observation and compensation based position tracking control of PMSM servo systems
ZOU Quan, QIAN Lin-fang
(School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China)
A disturbance observation and compensation based sliding mode control scheme was proposed for the position tracking control of PMSM servo system with parameters perturbation and external disturbance torque.A disturbance observer was investigated to estimate the parameter perturbation and the disturbance torque,and the equivalent external disturbance torque was compensated according to the output of the disturbance observer,then the influence of the model uncertainty to the system control performance was reduced,and the position tracking error of the system was reduced from 0.85 rad to 0.35 rad.The discontinuous control term in traditional sliding mode control was chopped off while the stability of the closed system was guaranteed,the chattering phenomena was remedied effectively.Experimental results show that,compared with the traditional PID control scheme commonly used in practical engineering,the disturbance observation and compensation based sliding mode control scheme not only has higher tracking accuracy,but also eliminates the chattering phenomena effectively.
PMSM; tracking control;sliding mode control;disturbance observation;chattering
2014-04-30
国家自然科学基金(51205206)
邹 权(1987—),男,博士研究生,研究方向为电机伺服系统集成与控制; 钱林方(1961—),男,博士,教授,博士生导师,研究方向为火炮武器系统集成理论。
邹 权
10.15938/j.emc.2017.05.014
TP 273
A
1007-449X(2017)05-0105-05
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
测控技术(2018年12期)2018-11-25 09:37:44
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
弹箭与制导学报(2015年1期)2015-03-11 15:32:18