多水下机器人编队的组网通信方法研究
2017-05-15 01:42:57黄海李岳明庞永杰
电机与控制学报 2017年5期
黄海, 李岳明, 庞永杰
(哈尔滨工程大学 水下机器人技术重点实验室,黑龙江 哈尔滨 150001)
多水下机器人编队的组网通信方法研究
黄海, 李岳明, 庞永杰
(哈尔滨工程大学 水下机器人技术重点实验室,黑龙江 哈尔滨 150001)
使用水下机器人组网编队可以在更开阔的海域完成环境信息收集、区域搜索与快速环境感知等使命。为提高编队通信效率,研究了水声通信条件下多水下机器人组网通讯的方法。在多水下机器人的分层通信结构中,基于拓扑网络结构建立了信道传输模型。根据传输模型,对于距离领航员AUV节点较远而距离其他跟随AUV较近的节点采用线性拓扑传输方式,而对于其他AUV节点采用一对多竞争拓扑传输方式。在线性拓扑传输的自适应MAC协议中,领航员AUV和所有的跟随AUV通过广播与应答的方式实现时间同步,之后跟随AUV节点根据距离领航员AUV和数据传输的效果选择负责外围节点的通信或休眠,这就降低了领航AUV的能量消耗,提高了整个AUV编队组网的生存时间。而一对多竞争的自适应MAC协议包含了一种改进的握手机理,该协议可以降低传输的丢包率并提高网络的吞吐量。与AUV编队结合的通信仿真表明了该方法的先进性和有效性。
水下机器人;编队航行;组网通信;水声通信;MAC协议
0 引 言
随着近年来水下机器人在海洋勘探、环境监测、援潜救生、目标搜索等方面的飞速发展与广泛应用[1-2],使用水下机器人组网编队在更开阔的海域完成环境信息收集、区域搜索与快速环境感知等使命必然成为更具挑战力和吸引力的课题[3]。但由于无线电和光波在水中快速地衰减和发散,而水声通信的传播速率低(大约1 500 m/s)、带宽窄、存在多途干扰,使得水下机器人的组网通信与地或水面机器人相比存在更大的困难和差异[4-5]。
近年来,以欧美为首等海洋强国分别在大洋观测计划(ocean observation initiative,OOI) 和未知环境下异构无人系统的协调与控制(coordination and control of cooperating heterogeneous unmanned systems in uncertain environments,GREX) 等项目的支持下对多水下机器人的组网通信和编队作业等方面展开深入研究并进行了一定的试验。MIT的Schmidt教授针对多AUV快速环境感知的任务需要组建动态拓扑水声通信网络并创建网络协议,采用一种新的数据链路层处理信道中的各种数据包状态,将多AUV系统组成移动式的水下探测网络[6-7]。美国爱达荷大学的智能系统研究中心针对水雷的协作搜索任务,在通信方面设计中引入了自然语言的相关概念,通过语言的逻辑改善了水下组网通信带宽窄的限制[8-9]。欧盟组织德国、法国、葡萄牙、英国等多家科研机构面向多AUV编队结合信息交互过程建立了分层通信结构,该结构包括网络层、数据链路层和物理层,以处理通信中出现的延迟、信息损失、水声信号的发散等情况[10]。相比之下我国在多水下机器人组网通信方面只进行了初步的理论研究。哈尔滨工程大学张汝波等人针对水声通信组网,在IEEE802.11协议的基础上提出了一种动态调整侦听/睡眠时间占空比的改进协议,并通过NS2仿真环境,构建相关网络场景加以验证[11]。上海交通大学针对多海洋无人系统在海洋移动观测网络中,通过水声 MODEM 测距功能使水声通讯和水声定位系统合二为一,极大降低了试验成本和布放难度。提出的非竞争性的水声网络通信/定位协议,能够很好地协调多个节点完成水声网络通讯和定位[12]。
以上研究结果表明,要实现多水下机器人的协同组网,首先要以现有的通信设备为基础建立网络结构,其次是根据水声通信的传输特点在数据链路层开发出高效的路由算法与MAC(medium access control)协议。但目前为止,还没有一套比较成熟完善的通信方法,致使组网中信息传输的效率严重受限。
1 多水下机器人组网通信系统结构
建立多水下机器人组网通信系统结构的主要目的是为水下机器人个体之间的信息交互、协调提供支持,并实现机器人内部不同功能模块之间的信息流通。水下机器人的通信结构分为两部分:一是水下机器人自身的通信系统,它负责水下机器人内部的数据交换;另一类是机器人之间的通信系统。
如图1所示,水下机器人自身的通信系统主要负责机器人内部各个软件模块之间的通信,例如运动信息采集模块、环境信息采集模块、运动控制模块、导航与船位推算模块、行为融合与任务规划模块等。每个软件模块都相对独立,并且工作在相应的硬件系统组成的平台基础之上作为机器人的功能模块。模块之间的通信基于PC104总线使用TCP/IP socket协议,通过建立服务器端和客户端来实现。
水下机器人之间的通信是通过水声通信模块实现的。图2所示为水声通信模块,采用的是的分层通信结构,是基于Aquacomm network水声通讯系统开发的。Aquacomm是澳大利亚Innovation in Digital Signal Processing 公司开发的多信道水下通信系统,它使用扩展频谱在低能耗的情况下发出宽频信号。
在分层结构中,物理层是水声通信模块的底层,主要负责接收数据链路层的数据并顺序传输。其水声信道采用正交频分复用(OFDMA)多载波调制技术使用单个收发器将一条物理信道分割成多条数据传输的从属信道。
其数据链路层基于多载波码分多址(CDMA)技术传输策略实现并行扩频通信。利用伪随机码的相关特性,使用不同的伪随机编码区分不同的用户。在直接序列扩频的接收端主动利用多途能量补偿水声信道多途衰落的影响,鲁棒性较强。
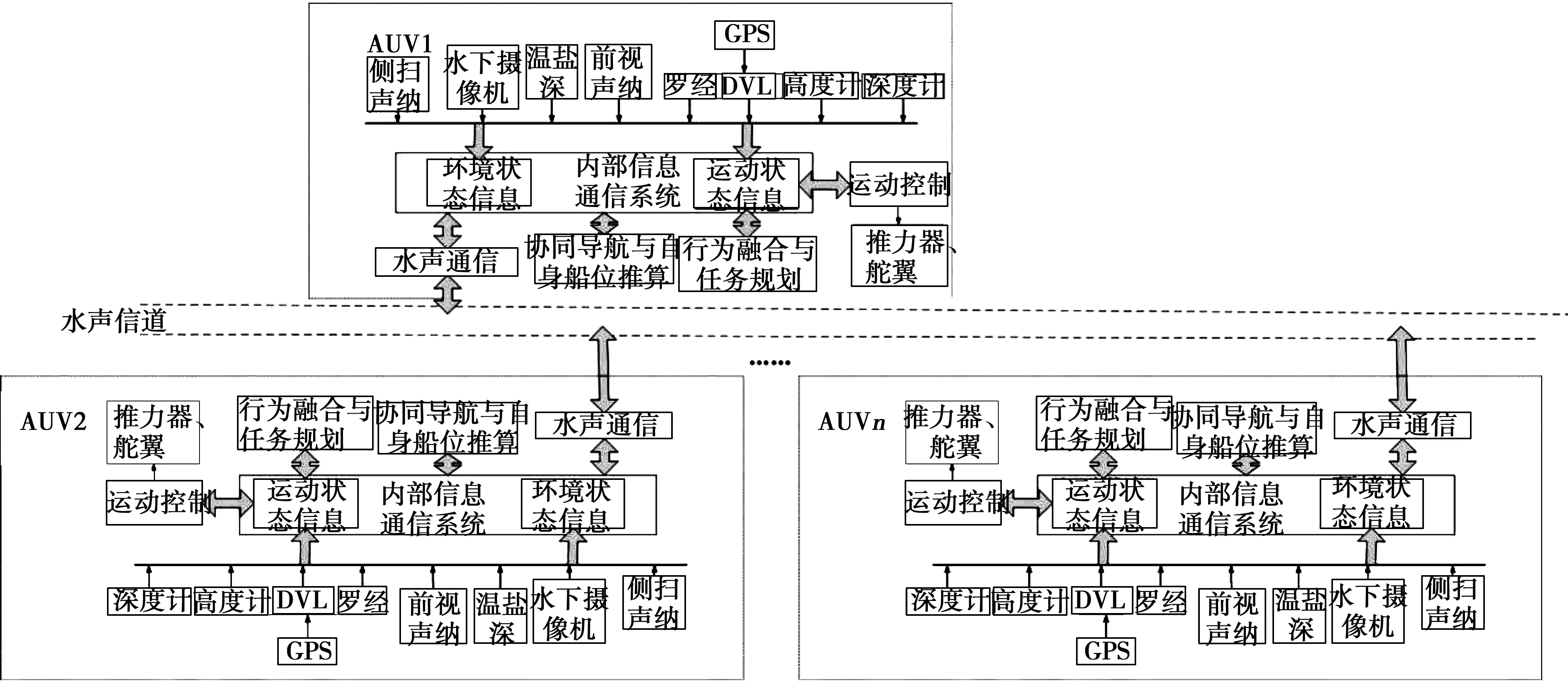
图1 多水下机器人组网通信系统结构Fig.1 MAUV communication network infrastructur

图2 分层通信结构Fig.2 Layered architecture of the communication module
数据链路层的任务主要是实现数据在相邻节点之间的链路无差错地传输。而由于水声信道存在较大时延,致使简单的RTS/CTS数据包交互机制并不适用于水下通信网络,而目前还没有一个适合的介质访问控制(MAC)协议以实现信道资源的合理分配,所以本文将在下一节进一步地展开研究。
网络层的任务是选择合适的路由信息,确定分发源节点和目的节点之间的路由搜索与信息。
在通信系统结构的基础上使用有向图定义AUV之间通信的拓扑结构,设G=(V,ξ,A)为多个AUV组成的带权有向图,其中V={s1,s2,…,sn}是AUV的节点集,图的有向边集为ξ⊆V×V,A=[aij]为有向图的带权邻接矩阵,aij≥0。每一条边(si,sj)对应AUVsi和AUVsj在t时刻通信过程中的信道,即ξij∈ξ⟺aij>0。定义对角阵Δ(G)=diag{g1,g2,…,gn},于是带权矩阵G的Laplacian阵为
L(G)=Δ(G)-A,
(1)
其中L(G)是对称的半正定矩阵。
和陆地的无线通信相比,水声通信受到诸如海水的温度、盐度和深度等多种因素的影响,根据文献[13],水中的声速若按下式计算误差大约在0.070m/s,有v= 1448.96+4.591C-5.304·10-4C3+
1.340(S-35)+1.630·10-2D+1.675·107D2-
1.025·10-2C(S-35)7.139·10-13CD3。
式中:C是摄氏度;S表示盐度;D表示深度。

式中:k0是比例系数;ui是控制输入。这样多AUV通信的的时间一致性将根据下式考虑:
(2)
式中:k1>0、γ>0;pi(t)是辅助变量,pi(0)=0;τij为si到sj的传输延迟。
水中传播的吸收率和信号频率的函数关系为[14]
10logAb(l,f)=k·10logl+lα。
式中:α是吸收系数;k代表几何传播系数。水声传播的噪声模型包含混响噪声Nt、船舶噪声Ns、波浪噪声Nw、温度噪声Nth,Ab()为吸收率,l为水声信号传输范围,有
N=Nt+Ns+Nw+Nth。
最终得到信道特征模型为
(3)
式中:B为带宽;Ptx为信号传播功率。
根据上面的分析可知,多AUV编队,尤其是基于领航员的编队,可以被看为是多播网络树,其能量损失和数据的传输距离相关,由于AUV节点之间相对距离越大,节点之间的通信时间以及所需能量就越大,所以为了减少传输距离造成的通信延迟和误码率,提高多AUV组网通信的生存时间,可以根据AUV节点之间的相对距离,对于距离领航员AUV节点较远而距离其他跟随AUV较近的节点采用线性拓扑传输方式,而对于其他AUV节点采用一对多竞争拓扑传输方式(图3)。

图3多水下机器人组网通信的拓扑结构Fig.3 MAUV communication network topology
2 组网通信的自适应MAC协议
2.1 线性拓扑传输的自适应MAC协议
当一个领航员AUV与其他几个AUV跟随节点采用线性拓扑传输方式通信时,所设计的自适应MAC协议中每个节点均包含一个“RTS” (RequestToSend)、“CTS”(ClearToSend)、“Data”、“ACK”(acknowledgmentforreceiving)。协议过程将分为4个阶段,如图4所示。

图4 线性拓扑传输的自适应MAC协议Fig.4 Adaptive MAC protocol for linear topology transmission
首先,当信道竞争选择完毕后,领航员AUV和所有的跟随AUV通过广播与应答的方式实现时间同步,领航员AUV将通过中间节点1向接收节点2发送消息。
其次,领航员AUV首先向接收节点1发送“RTS”消息,其数据包格式为{RTS,node_pos,node_speed,destination_node},分别代表领航员AUV的数据发送请求、当前位置、速度和目的接收节点(这里假设接收节点为目的AUV2)。当接收节点1收到“RTS”消息时,该AUV直接将该消息传递至接受节点2,并一直等待直至接收到目的AUV2返回的“CTS”或超时帧。当接收节点2收到“RTS”消息时,该节点被通知有即将到来的消息传输,目的AUV进入“Responseadjustment”状态,同时向接收节点1传递“CTS”信息。当接收节点1收到接收节点2的“CTS”消息或超时帧时,将向领航员AUV返回“CTS”消息,其数据包格式为{CTS1/overtime,node1_pos,node1_speed,CTS2/overtime,node2_pos,node2_speed},分别代表接收节点1或2发出的“CTS”或超时消息以及接收节点1或2的当前位置和速度。当超时发生时,领航员AUV将重新根据其他AUV节点的位置信息选择目的AUV。
再次,当领航员AUV收到“CTS”消息,将通过相应的信道经接收节点1向接收节点2发送数据,如果目的AUV1从领航员AUV接收到“Data”,它就进入“Responseadjustment”状态,并将数据包转发至接收节点2。接收节点2接收数据完毕后,将进入“ACK”状态,向接收节点1发送“ACK”数据包,否则即为数据传输超时。
在第四阶段,一旦“Responseadjustment”的状态完成,接收AUV2将向接收AUV节点1发送“ACK”数据包,接收AUV节点1再将“ACK”数据包转发给领航员AUV节点。接收节点1所发送的“ACK”数据包格式为{ACK1/overtime,node1_pos,node1_speed,ACK2/overtime,node2_pos,node2_speed},分别代表接收节点1或2发出的“ACK”或超时消息以及接收节点1或2的当前位置和速度。在领航员AUV接收到“ACK”数据包后,将结束其数据传输过程,节点进入休眠状态。
由于数据包经过了两次节点传输的过程,因此所需的传输时间为
Tlisten=2(TCTS+TRTS+TData+TAck)+TSYNC,
式中TSYNC是信道竞争与时间同步的时间。所以数据传输周期为
TDuty=Tlisten+TSleep。
2.2 基于竞争的自适应MAC协议
当一个领航员AUV节点同时和几个AUV接收节点通信时,将采用基于竞争的自适应MAC协议实现数据传输。
首先,领航员AUV携带它要发出的消息在预定的信道发出预接触数据包,如果几个AUV接收节点同时发出预接触数据包,信道将对节点进行竞争和选择。信道竞争选择完毕后领航员AUV将通过信道与目的AUV进行握手。所设计的自适应MAC协议包含一个“RTS”、“CTS”、“Data”、“ACK”的四路握手方法以及一个对其他等待AUV的阻止发送(BlockToSend-BTS)数据包。而消息传输的延迟过程包含在“Responseadjustment”时间内。在传输过程中,信道将通过BTS阻止其他AUV节点的使用。
四路握手协议包含如图5所示的4个阶段。

图5 基于竞争的自适应MAC协议Fig.5 Contention-based adaptive MAC protocol
在第一阶段,当目的AUV接收到“RTS”帧时,该AUV被通知有即将到来的消息传输。目的AUV进入“Responseadjustment”状态,以通过所选择的信道从领航员AUV接收数据包。同时向其他AUV节点发送“BTS”数据包以通知它们在这段时间可以进入“睡眠”(sleep)状态,以避免在整个的数据传输过程中发生冲突。
在第二阶段中,领航员AUV发出“RTS”帧后,将一直等待直至接收到目的AUV返回的“CTS”或超时帧。当超时发生时,领航员AUV就返回信道竞争和选择状态。显然,在数据包和它的“Responseadjustment”之间的传输延迟至少等于该数据包被发送/接收时间,以便于节点的响应可以一个个地被连续地处理。这样,所发送的“RTS”数据包和接收到的“CTS”数据包是具有相同最大单程传播延迟的两个动作,其传输的最大时间延迟分别为Tmax。如果我们定义一个控制帧和其后续帧之间的固定时间长度为“CML”,那么在领航员AUV发送“RTS”和收到目的AUV返回“CTS”之间的时间长度可以定义为CMLRTS,在目的AUV发送“CTS”和收到领航员AUV发送来的“Data”数据包之间的时间长度被称为“CMLCTS”。所以定义数据传输的最大时长为
CMLRTS= CMLCTS=Tmax。
当目的AUV接收到“RTS”数据包后,它通过水声通讯系统测量得到的距离信息来计算“CTS”数据包到达领航员AUV的时间,即一个“CML”的时间间隔。在“CML”的时间,信道将避免潜在通信干扰的冲突。一旦“Responseadjustment”状态结束,领航员AUV将通过相应的信道向目的AUV发送数据包。总之,第二阶段使目的AUV与领航员AUV进行协商,一方面具有更大的灵活性,另一方面降低了由于信道冲突引起的传输失败。
第三阶段开始于领航员AUV接收“CTS”数据包。在这个阶段,领航员AUV将通过相应的信道向目的AUV发送数据包,如果目的AUV从领航员AUV接收到“Data”,它就进入“Responseadjustment”状态,数据包发送和接收完毕后,将进入“ACK”状态,否则即为数据传输超时。
在第四阶段,一旦“Responseadjustment”的状态完成,目的AUV将发送“ACK”数据包。在领航员AUV接收到“ACK”数据包后,将结束其数据传输过程。所发送的“BTS”数据包将重置向发送,以唤醒其他AUV节点,重新进入信道需求状态。
所以4个阶段的握手过程所持续的时间为
Tlisten≤2Tmax+CMLData。
3 仿真实验结果分析
为了验证和分析所设计的组网通信方法,接下来将使用应用网络仿真软件NS结合参考文献[15]中的编队算法得到的多AUV编队仿真轨迹,根据第一部分的水声信道的能量模型(3)对编队中信息传输的能量和效率进行仿真。仿真的内容主要包括网络能量消耗与时间延迟、丢包率和单位时间吞吐量等。NS是一个面向对象离散时间驱动的模拟器,主要使用C++和OTcl作为开发语言,网络模拟围绕路由算法、多播协议等环境参数进行[16]。
图6和图7分别是多AUV采用基于线性拓扑自适应MAC协议和基于竞争的自适应MAC协议编队航行的通讯情况。其中AUV1为领航员AUV,AUV2、AUV3和AUV4为跟随AUV。图6中由于AUV2、AUV3和AUV4距领航员AUV1的相对距离较远,而跟随AUV之间的距离较近,所以采取线性拓扑MAC协议的通讯方式。从仿真结果上看,这种方式使得跟随AUV的丢包率基本持平。由于通讯中每个AUV所携带的数据量不同,距离领航员AUV越远的AUV所需要的数据越少,而距离领航员AUV较近的不仅要完成自身的数据通讯,还要负责外围的AUV通讯,所以单位时间的吞吐量是从内到外依次减少的。但AUV之间的通讯效率并没有随着距离的增加而显著降低,并且这种方法通过AUV之间的通讯,较大地降低了领航AUV的能量消耗,提高了整个AUV编队组网的生存时间。图7中由于跟随AUV相对领航员AUV1的距离相近,所以采用一对多竞争的自适应MAC协议,在通讯的过程中延迟时间、丢包率和单位时间吞吐量均比较接近,并且由于该协议根据数据包的收发情况采用竞争及时调整AUV之间的通讯,相比周期性休眠的协议更适合移动节点水声通讯这种大时延和丢包率比较高的情况。

图6 基于线性拓扑的MAC协议仿真结果Fig.6 Results of MAC protocol based linear topology

图7 基于竞争拓扑的MAC协议仿真结果Fig.7 Simulation results of MAC protocol based contending topology
4 结 论
本文研究了水声通信条件下多水下机器人组网通讯的方法。建立了多AUV组网通信系统结构,该结构分为两部分:AUV自身的通信系统和AUV之间的通信系统。在AUV之间的分层通信结构中,结合编队网络层的拓扑结构建立了数据链路层的自适应MAC协议。在多水下机器人的分层通信结构中,基于拓扑网络结构建立了信道传输模型。根据能量模型,对于距离领航员AUV节点较远而距离其他跟随AUV较近的节点采用线性拓扑传输方式,由距离领航员AUV较近的节点负责外围AUV的通信;而对于其他AUV节点采用一对多竞争拓扑传输方式,通过改进的握手机理实现自适应通信。仿真结果表明,线性拓扑传输的自适应MAC协议降低了领航AUV的能量消耗,提高了整个AUV编队组网的生存时间;基于竞争的自适应MAC协议降低了传输的丢包率并提高了网络的吞吐量。
[1] 徐玉如,肖坤.智能海洋机器人技术进展[J].自动化学报,2007,33(5):518-521. XU Yuru,XIAO Kun.Technology development of autonomous ocean vehicle[J].Acta Automatica Sinica,2007,33(5):518-521.
[2] 曾文静,徐玉如,万磊,等.自主式水下机器人的光视觉管道探测跟踪系统[J].上海交通大学学报,2012,46(2): 178-189. ZENG Wenjing,XU Yuru,WAN Lei,et al.Robotics vision-based system of autonomous underwater vehicle for an underwater pipeline tracker[J].Journal of Shang Hai Jiao Tong University,2012,46(2): 178-189.
[4] CAITI Andrea,GRYTHE Knut,JENSM Hovem,et al.Linking acoustic communications and network performance: integration and experimentation of an underwater acoustic network[J].IEEE Journal of Oceanic Engineering,2013,38(4): 758-771.
[5] CHEN Baozhi,DARIO Pompili.Quo vadis: QoS-aware underwater optimization framework for inter-vehicle communication using acoustic directional transducers[C]//2011 8th Annual IEEE Communications Society Conference on Sensor,Mesh and Ad Hoc Communications and Networks,Sheraton Salt Lake City Hotel Salt Lake City,UT,USA.2011: 341-349.
[6] SCHNEIDER T,SCHMIDT H.Unified command and control for heterogeneous marine sensing networks[J].Journal of Field Robotics,2010:1-14.
[7] GHABCHELLO R,KAMINER I,AGUIAR A.A general framework for multiple vehicle time coordinated path following control[C]//2009 American Control Conference,Hyatt Regency St.Louis Riverfront St.Louis,MO,USA.2009: 3071-3076.
[8] JOHNSON Benjamin,HALLIN Nicodemus,LEIDENFROST Hans,et al.Collaborative mapping with autonomous underwater vehicles in low-bandwidth conditions[C]//Oceans 2009 Europe,Messe Bremen (Bremen Fair) Bremen,Germany.2009: 1-7.
[9] ANDREW Rajala,DEAN Edwards.Allocating AUVs for mine map development in MCM[C]//Oceans 2006 Asia Pacific,Raffles City Convention Centre,Singapore.2006: 1-8.
[10] KALWA,JÖRG.The GREX-project: coordination and control of cooperating heterogeneous unmanned systems in uncertain environments[C]//OCEANS '09 IEEE Bremen,Messe Bremen (Bremen Fair) Bremen,Germany.2009: 1-9.
[11] 赵占伟.水声通信网络MAC协议研究[D].哈尔滨:哈尔滨工程大学,2011.
[12] 陈煦蔚,冯正平.移动式水下观测网络的队形稳定性[J].海洋工程,2010,2(28): 212-217. CHEN Xuwei,FENG Zhengping.Formation stability of underwater mobile sensing networks[J].The Ocean Engineering,2010,28(2): 122-127.
[13] 何晨光.无线传感器网络MAC协议高能效性能研究[D].哈尔滨:哈尔滨工业大学,2011.
[14] VINCENT Ngo,ALAGAN Anpalagan.A detailed review of energy-efficient medium access control protocols for mobile sensor networks[J].Computers and Electrical Engineering,2010,36: 383-396.
[15] HUANG Hai,WAN Lei,JIANG Dapeng,et al.Adaptive AUV formation strategy under acoustic communication conditions[C]//IEEE Oceans 2014 Taipei,TBD Taipei,China.2014:1-6.
[16] MYUNGSUB Lee,PARK Chang-Hyeon.A differential probability selection MAC protocol considering energy consumption in wireless sensor networks[J].International Journal of Distributed Sensor Networks,2013: 1-8.
Network communication research for multiple AUV formation
HUANG Hai, LI Yue-ming, PANG Yong-jie
(National Key Laboratory of Technology of Autonomous Underwater Vehicles,Harbin Engineering University,
Harbin 150001,China)
In order to improve communication efficiency,hydroacoustic network communication was researched.In the hierarchical communication structure,transmission model of the acoustic channel was esablished on the basis of network topology.Acorrding to the model,linear topology communication was applied for the objective AUV far away from leader AUV but closer to other AUVs,while a one to many contending topology communication was applied for other AUVs.In the adaptive MAC protocol of linear topology,leader AUV sends time synchronize packets to others through broadcast,then objective nodes decide the communication or sleep off external nodes according to the distance of leader AUV as well as the effect of data transmission,which reduce the energy consumption of leader AUV and improve survival lifetime for the whole AUV network communication.On the other hand,one-to-many contention based adaptive MAC protocol includes an improved handshaking mechanism,which can reduce packets loss rate and improve throughput of the network.Simulations with multi-AUV formation illustrate advancement and effectiveness of the research.
underwater vehicles; formation cruising; network communication; acoustic communication; MAC protocol
2016-02-15
国家自然科学基金(5129050,51579053,61633009)
黄 海(1978—),男,博士,副教授,研究方向为水下机器人技术; 李岳明(1983—),男,博士,讲师,研究方向为水下机器人控制技术; 庞永杰(1955—),男,教授,研究方向为水下机器人。
黄 海
10.15938/j.emc.2017.05.013
TP 24
A
1007-449X(2017)05-0097-08
猜你喜欢
军事文摘(2023年5期)2023-03-27 08:56:26
车主之友(2022年5期)2022-11-23 07:25:30
故事作文·低年级(2021年5期)2021-06-01 05:53:22
意林(2019年10期)2019-06-03 16:37:12
北京航空航天大学学报(2017年3期)2017-11-23 05:14:41
汽车博览(2017年8期)2017-08-15 11:15:02
电子制作(2017年22期)2017-02-02 07:10:34
电子制作(2017年19期)2017-02-02 07:08:28
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
海军航空大学学报(2015年4期)2015-02-27 13:45:56