
机器人自动钻铆系统集成控制技术*
2017-05-15 09:58:40
航空制造技术 2017年9期
(南京航空航天大学机电学院,南京210016)
航空工业是国家级战略性产业,是世界大国间竞争的超级产业的重要组成部分,是一个关系国家经济命脉和国防安全的高技术产业[1]。在航空制造领域中,基于工业机器人的柔性装配钻铆技术凭借其高效率、高质量和高可靠性等显著优势,已成为飞机数字化柔性装配的重要发展趋势[2-4]。目前,国外著名的飞机装配设备制造厂家生产了许多大型的面向飞机装配的自动化设备,并已经在空客A380、波音787、JSF 战斗机等产品的研制过程中得到应用,效果相当显著,不仅在很大程度上降低了飞机的研发制造成本、缩短了生产周期,并且飞机等航空装备的装配质量也大大提高[5]。在国内,北京航空航天大学、南京航空航天大学、浙江大学和西北工业大学都对此进行了较为深入的研究,但对其控制方式、研究思想不太相同,而且大部分研究只是在制孔和检测方面较深入。
本文针对机器人自动化钻铆系统的集成控制技术进行了研究,在精度的控制方面,针对各个工作环节可能造成的误差提出了多种在线或者离线的精度补偿的方法,例如制孔前的基准检测和法向找正等,并且在制孔锪窝时的精度控制等一些关键的技术上进行改进和优化,设计了一套面向飞机装配的机器人自动钻铆设备[6-11]。
集成系统硬件组态与通讯架构
1 集成系统硬件组态
在飞机装配中应用机器人来进行制孔铆接将是未来发展的趋势。本系统由KUKA机器人作为本体承载多功能末端执行器进行制孔铆接等一系列工作,并通过扩展地轨增大机器人工作范围,采用外置刀库来进行刀具磨损或者断刀后的自动换刀操作。另外,利用冷却机、真空吸屑器等设备来辅助整个工作的快速安全进行。整套设备由上位层的工控机通过Beckhoff的PLC控制系统来进行统筹指挥。其系统整体硬件结构如图1所示。
2 通讯链路架构
整个系统采用现场总线模式,利用上位机PC集成控制的方式实现,由于下层被控硬件设备所兼容的通信方式和协议不同,因此采用多种通信协议进行协调控制,通讯链路架构如图2所示。
采用两条通信主线实现对机器人的控制。第一条通信主线采用通用的Ethernet工业以太网,遵循TCP/IP协议,由上位机PC 通过上位机网卡1,借助以太网线与机器人控制柜内以太网通信模块取得连接,从而实现机器人点位信息自上而下的传输以及机器人自身当前状态信息的自下而上的反馈[11]。第二条通信主线采用德国Beckhoff公司开发的EtherCAT工业以太网,先由上位机PC通过以太网和Beckhoff公司自己开发的PLC端子排连接,端子排中的EL6731端子模块以Profibus_DP协议接入KUKA机器人的控制柜中实现和机器人系统的内部变量映射。而对地轨、末端执行器、刀库以及其他辅助设备的控制则是通过Beckhoff的EtherCAT工业以太网协议,采用不同的端子模块接入端子耦合模块中,最后利用以太网线接入上位机PC中,由上位层工控机实现对整个加工系统的集成控制。
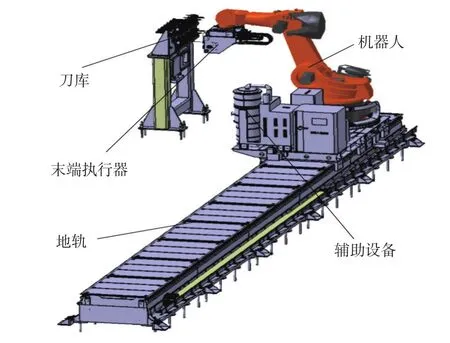
图1 系统硬件组态Fig.1 Hardware configuration of system
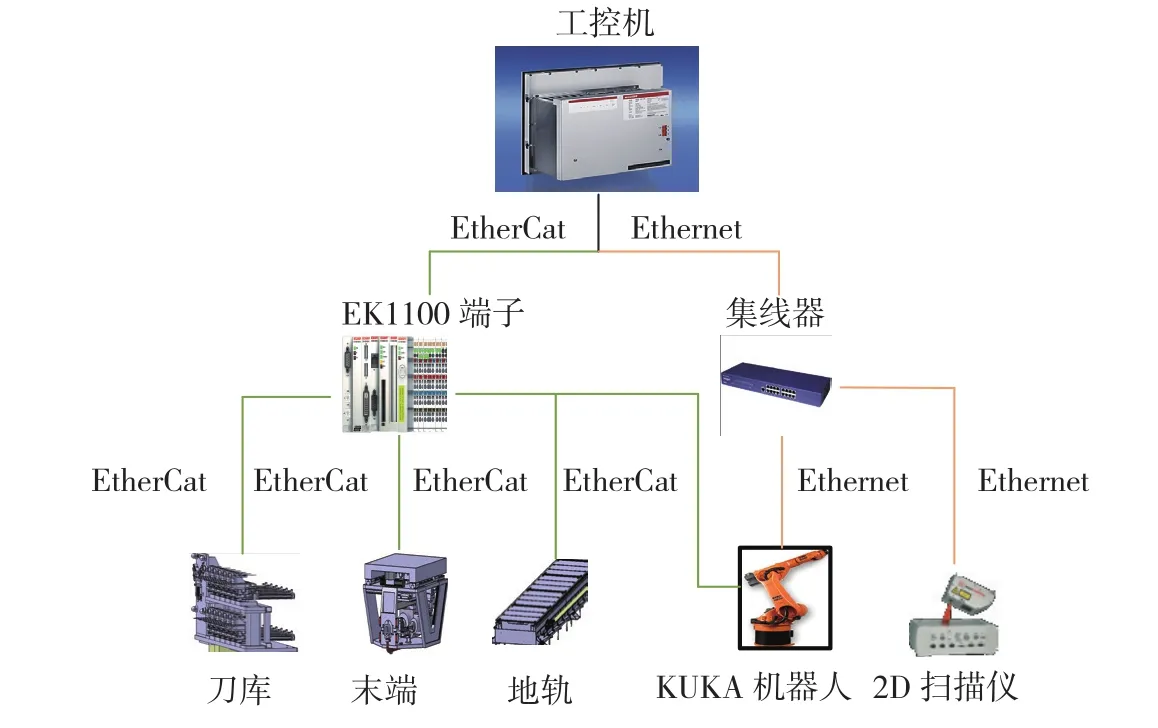
图2 系统通讯链路架构Fig.2 Communication configuration of system
集成控制系统工作流程
本系统是面向飞机装配的自动化钻铆集成设备,整个工作流程从最开始的离线编程开始,通过离线编程生成机器人走位点的一系列NC代码信息,然后将此NC代码加载到上位层工控机上,经过精度补偿算法对工装上基准孔点位信息补偿后发送给机器人自己的控制柜进行走位,机器人定位完成后利用2D扫描仪进行基准检测,得到工装的理论与实际的位置误差,利用此误差对机器人后续走位待钻孔进行误差补偿。当机器人走位到待钻孔后首先进行法向找正,然后控制末端执行器进行钻孔、锪窝、检测、涂胶、擦胶、送钉、铆接、断刀检测等一系列工作。当刀具磨损或者断刀后控制机器人定位至刀库进行自动换刀操作,从而完成整个飞机部件的自动化装配,具体流程图见图3。
各子系统设计
1 机器人与外部自动控制
KUKA机器人提供了4种操作模式,分别为T1(手动慢速)、T2(手动快速)、AUT(自动模式)、AUT EXT(外部自动模式)。其中机器人的外部自动模式支持上级外部控制系统对机器人本身系统的接管控制,使机器人自身控制系统成为整个集成系统中的一个有机的子系统被上位层工控机统一控制。
为了实现上位机对机器人的控制,首先需要对上位机中控制系统变量与机器人内部IO变量进行映射链接,之后在上位机集成控制软件中编写程序代码,按照用户基于外部自动控制规则所规定的时序图对机器人写入控制变量和读取机器人的反馈状态,实现指令由PLC到KRC的发送和由KRC到PLC的反馈。
2 基于磁栅尺反馈的扩展地轨

图3 系统工作流程Fig.3 Workflow of system
由于KUKA机器人在一个站位所达的范围有限,因此采用附加外部地轨的方式来扩展机器人的行程及加工范围。由于地轨的精度较低,所以采用分站式的工作方式,将机器人在地轨上的加工位置设为固定站位,在每一个固定站位进行精度补偿[12]。本文对地轨的补偿采用基于磁栅尺反馈的闭环控制技术,具体方法如下:
(1)首先在机器人每一个工作站位的地轨上安装磁栅尺传感器磁条,在机器人承载动平台上安装相应的传感器读数头。
(2)将磁栅尺传感器接入倍福编码器轴端子模块EL5151,并通过耦合器端子EK1100接入上位层工控机。
(3)工控PC机控制系统根据端子的反馈数据获得理论与实际位置的偏差,并利用离散化PID控制算法对承载动平台下达指令在地轨上运动,直至达到理论位置,最终实现闭环的位置控制。
3 末端执行器模块
3.1 制孔及锪窝检测模块
整个加工过程中最重要的是钻孔和锪窝流程。孔和窝的精度直接影响后期铆接的精度以及整个产品的加工质量。本文采用高精度西门子电机来驱动电主轴进给,电主轴的最大转速为19700r/min,满足加工要求。主轴上安装刀柄和带锪窝钻头,具体结构如图4所示。本系统配备真空吸屑装置,在钻孔时实时吸走复合材料的碳纤维和铝屑,从而避免断屑缠在刀具上。压力角压紧复合材料后利用改进和优化后的刀具进行制孔,可以达到孔径H8的精度。
为保证锪窝精度,在主轴侧面安装一个可随主轴进给电机一起运动的海德汉ST3078长度计,该长度计的精度可达±1μm。当执行钻孔环节时,压力角向前推出压到待钻孔表面,主轴进给电机带动主轴和海德汉长度计进行钻孔锪窝,当锪窝深度达到需要的精度要求时读取并记录当前位置的长度计读数。在之后的钻孔过程中,通过读取长度计的反馈值控制主轴进给电机的进给距离实现半闭环控制,当长度计读数达到之前记录的数据时主轴进给电机停止并退回。经试验论证此方法可使锪窝深度的检测精度达到±0.01μm以下。
3.2 送钉及检测模块
由于每个产品所需的铆钉类型包括直径和长度均有多种,而且数量较多,采用人工手动送钉无法实现。因此设计了一套自动送钉及检测装置如图5所示。
该装置以一个针对某具体项目设计的可以存放7种不同类型铆钉的钉床为基础,钉床上每个铆钉位置的X、Y坐标均一一标定并记录在数据库中。1个被安装在气缸上的三爪抓钉机构和激光位移传感器可以沿着Z向上下移动,该气缸可以由电机驱动在二维的龙门架导轨上沿着X或者Y方向移动。当需要抓取某种类型的铆钉时,气缸定位到这种类型铆钉所在位置,激光位移传感器检测铆钉长度,如果与要求不符合则放弃抓钉,如果铆钉长度符合要求,则三爪抓钉机构下移抓钉并将铆钉移至送钉口进行吹气送钉。
接钉位置上模块由多个气动元件、1个二爪卡钉机构和两个激光位移传感器组成,如图6所示。二爪卡钉机构夹持被送来的铆钉后沿Z轴后移,此时第一传感器将检查本身和夹具之间的距离来确定铆钉的直径,之后长度检查模块部分的气缸沿Y轴下移,二爪卡钉机构沿Z轴向前插入一个弹簧推动杆机构,此时第二传感器将测量本身与推杆机构之间的距离,并将数值反馈回上位机,如果发现铆钉的直径或长度错误,则相应的处理程序将会将铆钉投入废钉器中。
3.3 涂胶擦胶模块
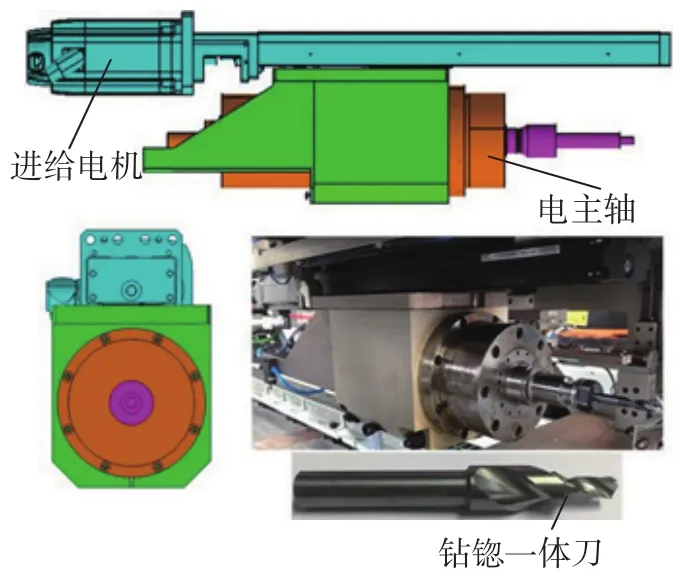
图4 制孔锪窝模块Fig.4 Drilling and countersink module
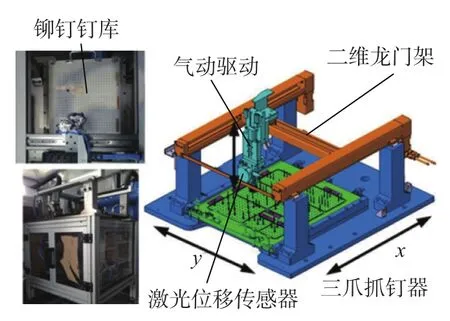
图5 自动送钉及检测装置Fig.5 Automatic rivet feeding equipment
在实际生产应用中,由于复材工装对密封性要求高,为此本文设计了铆钉涂胶及擦胶模块。该模块由伺服电机、气动气缸、传感器和多个功能桶组成,如图7所示。在密封胶桶单元中包含废钉收集器和色差传感器。当插钉机构由旋转气缸旋转后,胶桶打开并由伺服电机驱动上升涂胶,之后胶桶下降,插钉机构运行至擦胶位,胶桶再次上升,擦胶系统中的海绵吸收多余的胶水并利用色差传感器检测涂胶擦胶质量,若符合要求则插钉机构旋转回原位进行下一步插钉;若不符合要求则将执行废钉处理程序。整个涂胶擦胶应用的实现由各个单元协同配合执行。
3.4 铆接模块
该模块由CHERRY公司的手工拉铆枪改造而成,如图8所示。它主要由铆接头、动力单元和相关管路组件构成。为了将这一工具集成到末端执行器上,设计了一个安装底座以配合铆枪头,上面留有管路的相关接口。铆枪头和安装座均固定在滑块上,滑块由气动驱动使铆枪带着铆钉插入孔中进行铆接工作。
3.5 法向找正模块
在机器人钻铆系统中,制孔和铆接的质量和精度很大一部分取决于制孔时刀具轴线与带钻孔表面法线之间的夹角大小。为了满足飞机装配中对连接孔垂直精度的要求,需要对末端刀具角度进行法向找正。该找正功能由压力角基体周围对称分布的4个激光位移传感器实现,如图9所示。每个传感器相对于刀具坐标系的位置提前标定完成,制孔前先通过4个传感器读取蒙皮面到传感器的距离反馈值,从而得到刀具轴线与蒙皮表面法向的偏差角,之后通过相应算法控制机器人调整各关节角度带动末端执行器转动来补偿法向,从而满足系统法向定位精度的要求。
3.6 基准检测模块

图6 接钉与检查模块Fig.6 Rivet reception and geometry check module

图7 涂胶擦胶模块Fig.7 Sealant application procedures
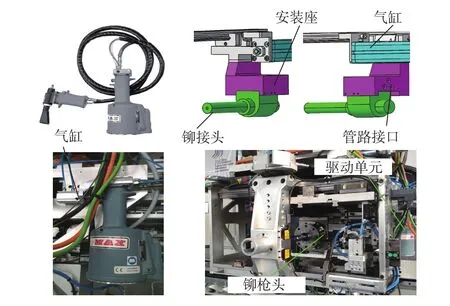
图8 铆接单元模块Fig.8 Riveting module
由于实际加工现场产品的制造和安装位置与理论数模之间有一定的偏差,因此需要基准检测模块检测并识别产品上的高精度基准孔,从而对待加工孔的位置进行修正。具体结构如图10所示。
该基准检测模块的实现方式为:首先二维激光轮廓扫描仪(简称2D扫描仪)定位至基准孔位置进行扫描,它可以得到基准孔在扫描仪自身坐标系下的X、Z向坐标,Y向坐标为保证高精度采用安装于扫描仪右侧的海德汉长度计的反馈值,之后扫描多个孔建立实际基准坐标系,通过坐标系之间的转换得到实际与理论数模的偏差,通过上位机程序对偏差进行处理和补偿最终实现对NC代码的修正。
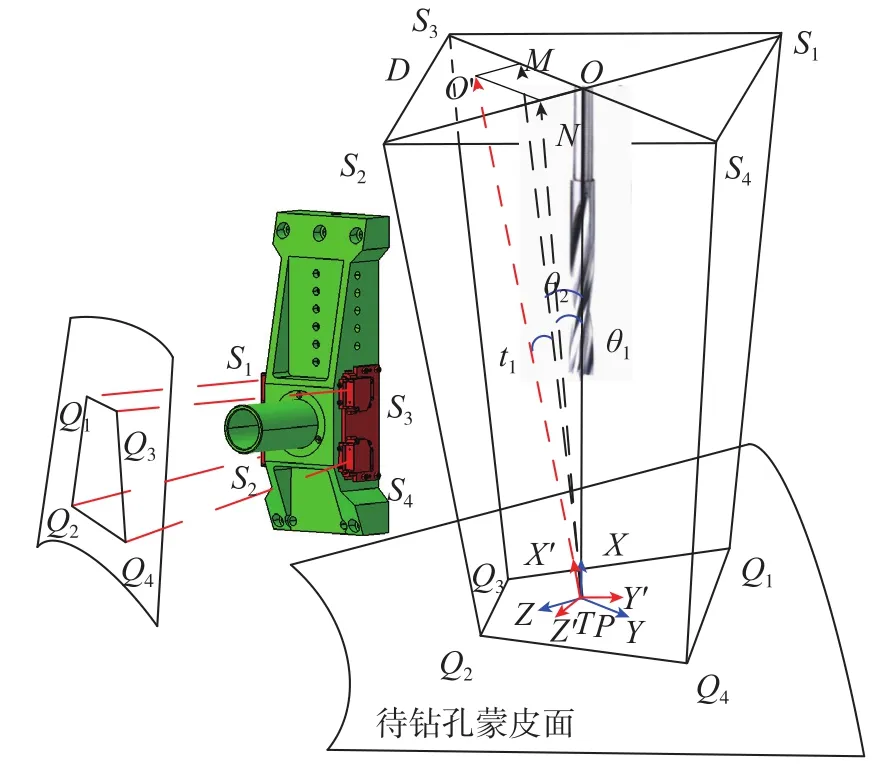
图9 法向找正模块Fig.9 Normal calibration module
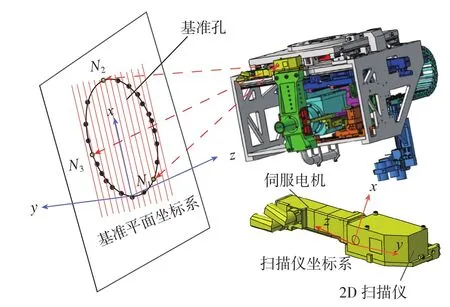
图10 基准检测模块Fig.10 Reference detection module
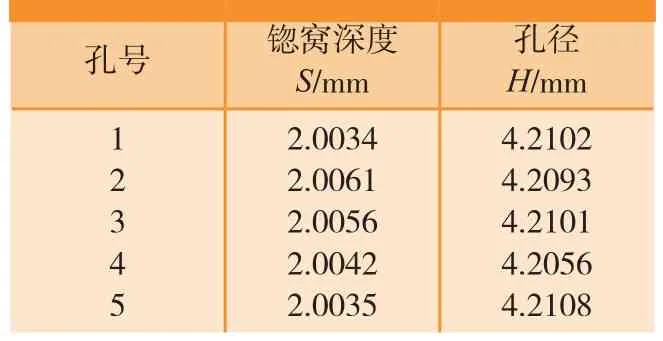
表1 碳纤维复合材料锪窝深度与孔径

表2 铝合金材料孔径
试验验证与分析
本系统基于多功能末端执行器、电主轴、海德汉长度计等硬件设备搭建试验平台。采用优化后的制孔工艺参数在碳纤维复合材料与铝合金叠层上进行制孔锪窝实验,孔径要求为4.2mm,锪窝深度为2mm。取5次试验数据,分别测试这5个孔的锪窝深度精度与孔径精度。得到表1、2所示数据。
由试验数据可知,碳纤维复合材料的5次锪窝深度值最大偏差为0.0061mm,满足加工与检测要求。复合材料的孔径误差最大为0.0108mm,铝合金的孔径误差最大为0.0137mm,均在H8以内,满足系统加工要求。
结论
(1)基于EtherCat和Ethernet协议的通讯方式提出一种集成控制技术,可以实现机器人、地轨、末端执行器和其他设备协同作用进行飞机的自动化装配工作。
(2)设计并优化一种多功能末端执行器,对其中某些功能模块采用新的方法进行精度的控制和补偿,使其加工质量和效率得到显著提高。
参 考 文 献
[1]冯华山,秦现生,王润孝.航空航天制造领域工业机器人发展趋势[J].航空制造技术,2013(19):32-37.
FENG Huashan,QIN Xianshang,WANG Runxiao.Developing trend of industrial robot in aerospace manufacturing industry[J].Aeronautical Manufacturing Technology,2013(19):32-37.
[2]TIAN W,ZHOU W X,ZHOU W.Auto-normalization algorithm for robotic precision drilling system in aircraft component assembly[J].Chinese Journal of Aeronautics,2013,26(2):495-500.
[3]TIAN W,ZENG Y F,ZHOU W.Calibration of robotic drilling systems with a moving rail[J].Chinese Journal of Aeronauti cs,2014,27(6):1598-1604.
[4]毕树生.机器人技术在航空工业中的应用[J].航空制造技术,2009(4):34-39.
BI Shusheng.Applications of robotics technology in aviation industry[J].Aeronautical Manufacturing Technology,2009(4):34-39.
[5]RUSSELL D.ONCE (one-sied cell end effector) robotic drilling system.Washington: Electroimpact Inc,2002.
[6]DEVLIEG R,SZALLAY T.Applied accurate robotic drilling for aircraft fuselage[J].SAE Int J Aerosp,2010,3(1): 180-186.
[7]邢志伟,高庆吉,党长河.飞机蒙皮检查机器人系统研究[J].机器人,2007,29(5):474-478.
XING Zhiwei,GAO Qingji,DANG Changhe.A robot for defect inspection of aircraft skin [J].Robot,2007,29(5):474-478.
[8]OLSSON T,ROBERTSSON A,JOHANSSON R.Flexible force control for accurate low-cost robot drilling [C]//procedings of 2007 IEEE international conference on robotics and automation,2007: 4770-4775.
[9]王黎明,冯潼能.数字化自动钻铆技术在飞机制造中的应用[J].航空制造技术,2008(11) : 42-45.
WANG Liming,FENG Tongneng.Application of digital automatic drillriveting technology in aircraft manufacture[R].Aeronautical Manufacturing Technology,2008(11) : 42-45.
[11]BRANKO S.Wing structural assembly methodology[J].SAE Paper 1998-10-13975, 1998.
[11]马世平.现场总线标准的现状和工业以太网技术[J].机电一体化, 2007(3) :6-13.
MA Shiping.Current status of fieldbus standards and industrial Ethernet technology[J].Mechatronics,2007(3) : 6-13.
[12]田威,戴家隆,周卫雪,等.附加外部轴的工业机器人自动钻铆系统分站式任务规划与控制技术[J].中国机械工程,2014,25(1): 23-27.
TIAN Wei,DAI Jialong,ZHOU Weixue,et al.Process planning and control technology on multi-station working mode of robot drilling and riveting system with auxiliary Axi [J].China Mechanical Engineering,2014,25(1) : 23-27.
猜你喜欢
小资CHIC!ELEGANCE(2022年3期)2022-01-11 23:23:31
装备制造技术(2020年9期)2021-01-26 00:15:24
装备制造技术(2020年2期)2020-12-14 03:09:30
装备制造技术(2020年2期)2020-12-14 03:09:24
装备制造技术(2020年2期)2020-12-14 03:09:10
测控技术(2018年12期)2018-11-25 09:37:50
制造技术与机床(2017年9期)2017-11-27 02:13:45
制造技术与机床(2017年3期)2017-06-23 08:11:21
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
