
远程预警雷达探测能力分析*
2017-05-13 02:16喻晨龙谭贤四李凡王红曲智国
现代防御技术 2017年2期
喻晨龙,谭贤四,李凡,王红,曲智国
(空军预警学院 a. 研究生管理大队; b. 二系, 湖北 武汉 430019)
远程预警雷达探测能力分析*
喻晨龙a,谭贤四b,李凡a,王红b,曲智国b
(空军预警学院 a. 研究生管理大队; b. 二系, 湖北 武汉 430019)
以临近空间高超声速目标防御为背景,研究了无引导信息下远程预警相控阵雷达搜索能力问题。针对临近空间工作模式,深入分析了雷达搜索屏、脉冲宽度、信号周期、搜索帧周期等搜索参数的设计原则和确认方法,分析了脉冲宽度随波束指向变化补偿关系,推导了目标不同高度仰角穿屏的最短穿屏距离和雷达捕获目标的最小扫描次数,以HTV-2为例仿真分析了雷达的探测能力,结果表明当目标迎面来袭时雷达具备完全的捕获能力,当目标从后方顶空来袭时为捕获目标需要采取TWS模式。
临近空间;高超声速目标;远程预警相控阵雷达;搜索参数;穿屏距离;扫描次数
0 引言
近年来,临近空间高超声速飞行器(NSHV)因其“飞行速度高”、“巡航高度高”、“突防能力强”、“打击距离远”、“可重复使用”的特点倍受各军事强国青睐[1]。为了应对这一杀手锏武器威胁,以现有反导预警系统装备为依托,构建临近空间高超声速目标防御体系成为共识。远程预警相控阵雷达是反导预警系统前端装备,具有早期发现、搜索跟踪、星弹识别、弹道预测、落点预报等功能,针对弹道导弹有很强的早期预警能力[2],能否完全适用临近空间高超声速目标探测有待深入分析。
相控阵雷达的探测性能包括2个方面:一是搜索捕获目标能力,要能尽早尽快捕获目标;二是跟踪目标能力,要能在各种环境背景下对单个或多个特定目标稳定跟踪。探测能力受限于具体工作模式下的能量资源和时间资源,依靠灵活的能量资源管理和时间资源管理实现各种功能。可通过阵面重构、脉宽调节、驻留调节等技术,改变阵面功率孔径积、波位发射脉冲宽度或波位驻留脉冲个数等,灵活控制整个阵面或每个波位能量;可通过各种算法优化搜索跟踪参数和策略,灵活分配搜索和跟踪时间资源,提高雷达单位时间任务执行能力;可通过各种算法优化雷达事件调度策略,提高雷达资源利用效率[3-6]。
相控阵雷达的搜索捕获能力由搜索策略决定。搜索策略主要包括搜索方式选择,搜索空域划分,搜索屏设计,波位编排样式,信号周期、搜索执行时间、搜索帧周期等参数的确定。公开发表的论文中,对相控阵雷达的搜索策略进行了大量的论述,文献[7-9]分析了有引导信息时相控阵雷达的搜索策略;文献[10]分析了资源受限时相控阵雷达搜索策略;文献[11]提出了基于射频隐身的参数优化方法;文献[12]提出了基于最小确认距离的参数优化方法;文献[13]提出了基于最小捕获时间的参数优化方法;文献[14]讨论了搜索策略中各要素的确认原则和设计方法,它们都是以弹道导弹防御为背景。临近空间高超声速目标防御为背景的较少,文献[15]探讨了雷达探测临近空间高超声速目标搜索策略,但适用的是跟踪制导雷达,与远程预警雷达有较大区别。
本文重点分析了在无引导信息情况下远程预警雷达探测临近空间高超声速目标时的搜索策略,给出了各要素的设计方法和解算原则。文章分析了雷达临近空间工作模式,明确了探测需求;针对临近空间目标的运动特点,设计了一个水平屏和一个高仰角屏,对每个波位进行补偿,确保天线增益不受波束指向影响,探测范围不受近距盲区限制;根据总时间资源小于穿屏时间原则,以目标运动特性为变量推导了目标最短穿屏距离,雷达的最小扫描次数;以HTV-2为例仿真分析了2个屏的搜索能力。
1 临近空间工作模式分析
远程预警相控阵雷达处于临近空间目标工作模式时工作场景如图1所示。假设有少量临近空间高超声速目标来袭,前端没有预警卫星引导,雷达采用自主搜索方式,工作在TAS模式,截获目标并确认后转入稳定跟踪,直到目标飞出空域或交接到杀伤链下端装备结束任务。

图1 临近空间工作模式场景图Fig.1 Scene graph of near space working pattern
图1中飞行轨迹①表示目标仅径向机动,飞行轨迹②表示目标径向机动的同时横向漂移。飞行轨迹③表示目标由外太空穿入临近空间,如弹道导弹、X-37B等,不属于严格意义上的临近空间高超声速目标,在此不作讨论。A点处为雷达位置,受地球曲率限制,针对临近空间空域,雷达最远直视距离为AB(距地面高度20 km)和AC(距地面高度100 km),随着波束仰角φ抬高,雷达需要探测的距离范围DE不断变小,直到仰角到达最大限度,此时雷达探测距离为AF(距地面高度20 km)和AG(距地面高度100 km)。
在△AOD中:


(1)
△AOE中:

(2)
考虑电磁波在大气中折射影响,地球半径等效为Rb=8 490 km,AD,AE随仰角变化规律如图2所示。
图2 AD,AE随仰角变化规律Fig.2 Change rule of AD and AE along with the angle φ
图2可看出AD,AE随仰角增大不断减小,极值AB≈583 km,AC≈1 300 km,AF=20 km,AG=100 km。可见受地球曲率影响,远程预警雷达探测临近空间目标最远距离为1 300 km,能力范围是DE划过的临近空间空域。
2 搜索参数设计
2.1 空域划分和搜索屏设置
在进行参数设计时,第1步是根据作战对象和战场环境确定雷达的监视空域与波位排列。从图1可知,临近空间目标可从各个方向进入雷达探测空域,仅当目标从地平线以下穿越BCC′B′所在环形平面或从雷达后方高空穿越FGG′F′所在环形平面时,才能被有效探测,侧面来袭的目标必须依靠其他装备。由于没有预警卫星信息引导,为了在最大范围内尽早发现目标,雷达紧贴着水平面和FGG′F′所在平面设置2个满方位的搜索警戒屏,如图3所示。
图3 监视空域划分Fig.3 Division of surveillance airspace
图中BB′S′SCC′P′P和II′F′FLGG′L′为搜索空域,BB′I′ICC′L′L为跟踪空域。为了分析方便,水平搜索屏用V1表示,顶空搜索屏用V2表示,V1安排单层波束,V2安排3层波束,交错波位编排[16],每层波位数记为N[9]。
2.2 脉冲宽度
远程预警相控阵雷达功率大,搜索扫描时采用单脉冲即可满足能量需求,但天线增益会随着波束指向不断变化,为了使得搜索过程中径向距离相同处能量相同,需要根据波束指向预先设定搜索屏上每个波位的脉冲宽度。
经典雷达距离方程:
(3)
式中:Rmax为最大作用距离;Pt为发射信号峰值功率;Gt为发射天线增益;Ar为接收天线等效面积;σ为目标RCS;τ为发射脉冲宽度;Ls为雷达系统和电磁波传输总损耗;k为玻尔兹曼常数;Te为噪声温度;(S/N)为给定的Pf,Pd条件下检测信噪比。如图1中波束指向(θ,φ)处,对应到阵面直角坐标系中的角度为(θ0,φ0),θ0,φ0分别为雷达扫描方位角和俯仰角,假设阵面倾角为Al,有
(4)
波束指向为(θ,φ)处相控阵天线的发射天线增益和接收天线等效面积分别为

(5)
Ar(θ,φ)=Ar(0,0)cosθ0cosφ0,
(6)
式中:At(0,0),Ar(0,0)分别为阵面法向波束的发射天线面积和接收天线面积。
当发射脉冲不变时,波束指向(θ,φ)的作用距离与阵面法向波束作用距离关系为
(7)
显然,随着波束指向改变,雷达探测能力不断变化,法向时作用距离最远。由图1可知,波束指向为(θ,φ)时,探测能力边界为
(8)
式中:τ(θ,φ)为波束指向(θ,φ)时脉冲宽度。
联立式(7),(8),有
(9)
式中:τ0,σ0,Rmax为雷达的探测能力基准。
另外,假设雷达采用时间顺序3波束,由于近距盲区影响,有
(10)
式中:C为光速;Δτ为波束切换时间。
因此,为了确保相同径向距离处增益相同,脉冲宽度τ(θ,φ)满足:
(11)
若(11)无解,表明需要补盲,脉冲补偿关系为

(12)
2.3 信号周期
信号周期根据搜索屏半径和单个波位波束驻留个数来确定,通常在最大不模糊距离所对应的时间基础上再加上10%~20%的余量。

(13)

(14)
2.4 搜索帧周期
先分析V1。从图1,3可看出雷达搜索发现目标可用的总时间不能大于目标穿越搜索屏所历时间,记n1V1为扫描次数,TsiV1为搜索帧周期,Tp为目标穿屏时间,有
n1V1TsiV1≤Tp.
(15)

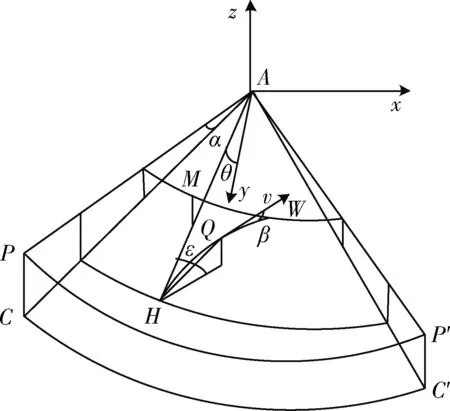
图4 目标穿屏示意图Fig.4 Schematic diagram of target through screen

(16)
可得

(17)
穿屏时间为
(18)
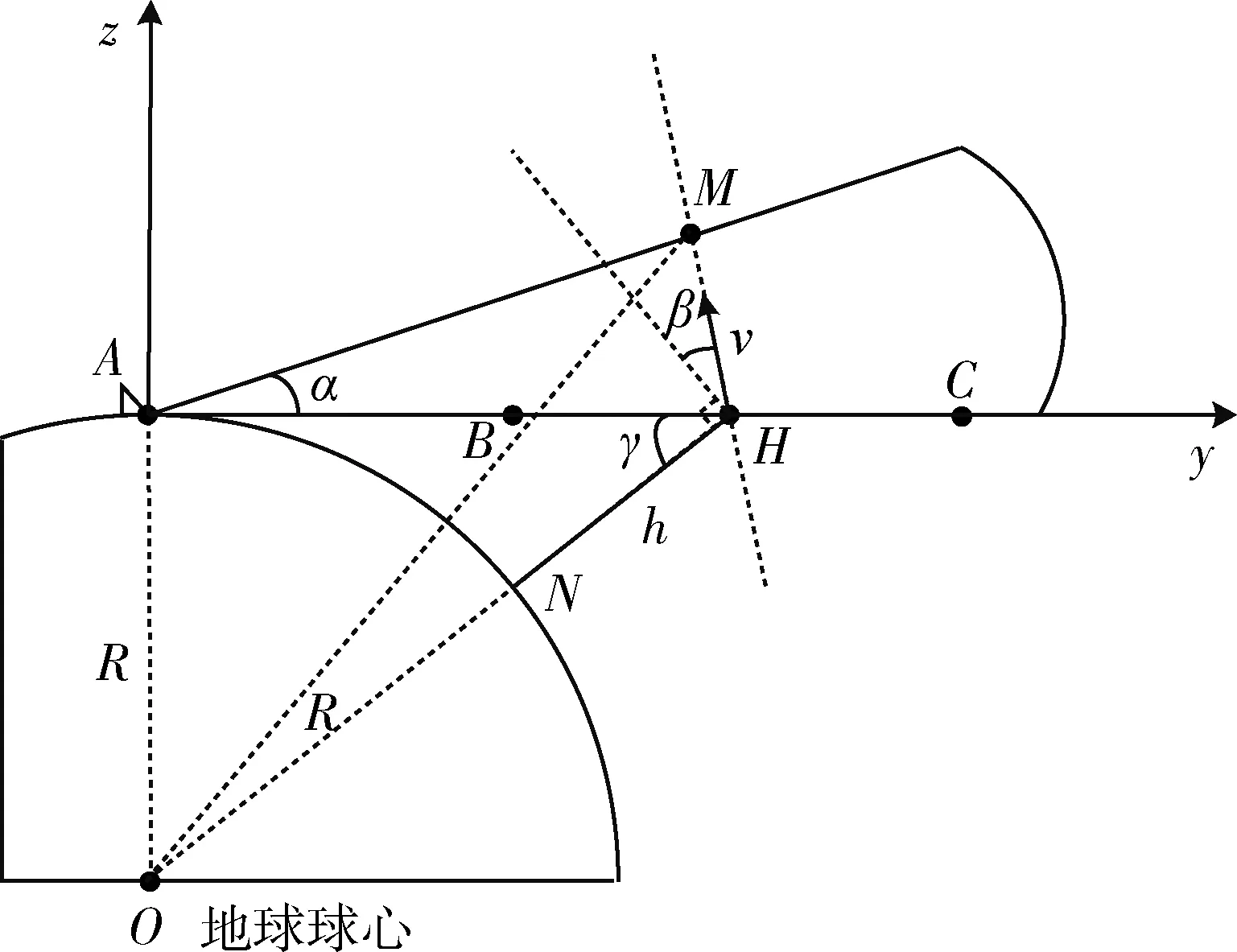
图5 AMH平面剖面图Fig.5 AMH plane cross-sectional view
另外,临近空间高超声速目标运动时可等效为SwerlingIII型目标,当雷达采用单脉冲形式时,检测概率与信噪比的关系为[17]
(19)
当目标信噪比达到SNR0=17.8 dB时,雷达第1次检测到目标,随着穿屏的深入,信噪比不断变大,检测概率变大。穿屏期间雷达共扫描了n1V1次,目标累积发现概率PF为

(20)
式中:Pdi为第i次照射时的检测概率。
(21)
假设目标期望的发现概率为PD,联立(15),(19),(20),(21)有
(22)
式中:Ceil为向上取整函数。为了节省发射功率和设备量,搜索数据率尽可能放宽,n1V1取极小值,TsiV1取极大值。
再分析V2。同理,目标从顶空穿屏,几何关系如图6。V2屏厚度为α2,顶空仰角为φ,目标高度为h2,航迹倾角为β2,有
(23)
可得

,
(24)
穿屏时间TpV2为
(25)
设V2屏扫描次数为n1V2,搜索帧周期为TsiV2,期望的发现概率为PD,同理有
(26)
图6 AHU剖面图Fig.6 AHU plane cross-sectional view
3 案例分析
以美国的HTV-2和“铺路爪”雷达为例进行分析。飞行器滑翔飞行时高度维持在30~60 km,Ma数维持在10~12,航迹倾角为-5°~3°,Ma数最高可到22,转弯速度最高可达3.14 rad/s,滑翔时长可达3 000 s[18]。课题组经过大量仿真发现,当雷达频率处于P波段,飞行器在60 km高度以15Ma飞行时,飞行器机头方向RCS可达到-3 dB,机身侧向RCS低至-20 dB。本文假定目标滑翔飞行时RCS约为-10 dB,雷达的探测距离约为5 000 km,波束宽度为2°,阵面倾角为20°。
搜索参数设计流程:
Step 1:确定搜索屏形状、波位编排样式和每个波位能量;
Step 2:目标穿屏,从目标特性产生器中获得目标参数;
Step 3:根据参数计算目标最短穿屏距离和穿屏时间;
Step 4:根据期望截获概率计算最小扫描次数,确定搜索帧周期范围;
若使雷达对所有临近空间高超声速目标均有搜索能力,分别对V1和V2进行设计:
先设计V1。根据式(11)预先设定搜索空域的每个波位脉冲宽度,波束宽度与波束指向关系如图7。从图7可看出,当方位角θ∈[-20°,20°]时,不受近距盲区影响,当方位角大于20°需要补偿,补偿脉冲宽度与波束指向关系如图8。
图7 脉冲宽度与波束指向关系Fig.7 Relation between pulse width and beam pointing
图8 脉冲补偿与波束指向关系Fig.8 Relation between pulse compensation and beam pointing
图9 V1屏最短穿屏距离变化曲面Fig.9 Change of shortest cross-screen distance of V1 screen
图10 穿屏时间与巡航速度关系曲线Fig.10 Relation between cross-screen time and flight speed
图11 V1屏扫描次数与累积发现概率关系Fig.11 Relationship between radar scanning frequency and the cumulative probability of discovering for V1 screen
雷达扫描次数与累积发现概率关系如图11,从图中可看出,扫描次数达到3次以上时积累检测概率满足期望值要求,因此V1搜索帧周期控制在6.4 s以下。
再设计V2。根据式(14)可算出,信号周期为0.8 ms。脉冲宽度与波束指向的关系如图12,可见以10 μs以下脉宽照射即可,无需进行补偿。
图12 脉冲宽度与波束指向变化Fig.12 Relationship between pulse width and beam pointing

图13 V2屏最短穿屏距离变化曲面Fig.13 Change of shortest cross-screen distance of V2 screen
图14 穿屏时间与巡航速度关系曲线Fig.14 Relationship between cross-screen time and flight speed
图15 V2屏扫描次数与累积发现概率关系Fig.15 Relationship between radar scanning frequency and the cumulative probability of discovering for V2 screen
雷达扫描次数与累积发现概率关系如图15,可看出当扫描次数达到3次以上时积累检测概率满足期望值要求,但是扫描一次的搜索执行时间Ts=NTru2≈0.09 s,不足以扫描3次,为了避免漏掉目标,需采取TWS模式。
综上可见,雷达对迎面来袭的目标具备完全的搜索捕获能力,可采用TAS模式,搜索数据率在6.4 s以下,对从雷达后方顶空穿屏的目标具备部分搜索捕获能力,需采用TWS模式。
4 结束语
临近空间高超声速飞行器给预警系统带来了新的巨大挑战,文章对远程预警相控阵雷达临近空间高超声速目标探测能力进行了分析,结合雷达临近空间工作模式,给出了搜索参数的设计方法和确认原则,以HTV-2为例仿真分析了雷达的搜索捕获能力,发现雷达对迎面来袭的目标具备完全的搜索捕获能力,可采用TAS模式,对从雷达后方顶空穿屏的目标具备部分搜索捕获能力,需采用TWS模式。下一步将针对跟踪能力开展研究。
[1] 李建林.临近空间高超声速飞行器发展研究[M].北京:中国宇航出版社,2012. LI Jian-lin. Research on Development of Near Space Hypersonic Vehicle[M] .Beijing: China Aerospace Press, 2012.
[2] 刘兴,粱维泰,赵敏.一体化空天防御系统[M]. 北京:国防工业出版社, 2011. LIU Xing, LIANG Wei-tai, ZHAO Min. Integrated Aerospace Defense System[M]. Beijing: National Defense Industry Press, 2011.
[3] Michael Zatman. Radar Resource Management for UESA[C]. IEEE International Conf,2000:73-76.
[4] Folker Hoffmann, Alexander Charlish. A Resource Allocation Model for the Radar Search Function[C]. IEEE International Radar Conference, 2014.
[5] Alexander Charlish, Karl Woodbridge, Hugh Griffiths. Phased Array Radar Resource Management Using Continuous Double Auction[J].IEEE Transactions on Aerospace and Electronic Systems 2015,51(3):2212-2224.
[6] ROBERTAZZI T. Scheduling Beam with Different Priorities on a Military Surveillance Radar[J]. IEEE Transactions on Aerospace and Electronic Systems,2012,48(2):1725-1739.
[7] 徐斌,杨晨阳,李少洪,等.相控阵雷达的最优分区搜索算法[J].电子学报,2000,28(12):69-73. XU Bin, YANG Chen-yang, LI Shao-hong, et al. Optimal Region Search Strategy in Phased Array Radar[J]. Acta Electronica Sinica, 2000,28(12):69-73.
[8] 周颖,王雪松,冯德军,等.基于弹道预报的相控阵雷达监视空域研究[J].电子与信息学报,2006,28(7): 1209- 1204. ZHOU Ying, WANG Xue-song, FENG De-jun, et al. Surveillance Volume of Phased Array Radar Based on Trajectory Prediction[J]. Journal of Electronics & Information Technology,2006, 28(7):1209-1204.
[9] 赵峰.弹道导弹防御跟踪制导雷达探测技术研究[D].长沙:国防科技大学,2007. ZHAO Feng. Study on Detection Techniques of Tracking and Guiding Radar in Ballistic Missile Defense[D]. Changsha: National University of Defense Technology,2007.
[10] 卢建斌,胡卫东,郁文贤.相控阵雷达资源受限时最优搜索性能研究[J].系统工程与电子技术,2004,26(10):1388- 1390. LU Jian-bin, HU Wei-dong, YU Wen-xian. Research on Optimal Search Performance of Phased Array Radars with Limited Resources[J]. Systems Engineering and Electronics, 2004,26(10):1388-1390.
[11] 张贞凯,周建江,汪飞,等.机载相控阵雷达射频隐身时最有搜索性能研究[J].宇航学报,2011,32(9):2023- 2028. ZHANG Zhen-kai, ZHOU Jian-jiang, WANG Fei, et al. Research on Optimal Search Performce of Airborne Phased Array Radar for Radio Frequency Stealth[J]. Journal of Astronautics, 2011, 32(9):2023-2028.
[12] HAFTBARADARAN P, KAMAERI M, MOFRAD R F. The Optimal Search for Multifunction Phased Array Radar[C]∥2009 Antennas & Propagation Conference, Loughborough, Nov.,2009:16-17.
[13] 邓桂福,刘华林,胥雷, 远程相控阵雷达搜索参数优化设计[J].雷达科学与技术,2012,10(1):32-36. DENG Gui-fu, LIU Hua-lin, XU Lei. Optimization of Search Parameters of Long Range Phased Array Radar[J].Radar Science and Technology, 2012, 10(1): 32-36.
[14] 张立韬,李盾,王国玉. 相控阵雷达搜索参数优化[J]. 现代雷达, 2008,30(10):20-25. ZHANG Li-tao, LI Dun, WANG Guo-yu, A Study on Search Parameters in Phased Array Radar[J]. Modern Radar, 2008, 30(10):20-25.
[15] 李志淮,谭贤四,王红,等. 临近空间高超声速目标跟踪制导雷达最优波位编排模型[J]. 光电子·激光,2013,24(4):794-798. LI Zhi-huai, TAN Xian-si, WANG Hong, et al. A Model of the Optimal Beam Position Arrangement on Tracking and Guiding Radar for Near Space Hypersonic Target[J]. Journal of Optoelectronics·Laser, 2013,24(4): 794-798.
[16] 陈文丽,苏东林.相控阵雷达搜索方式下波位编排与优化[J].飞行器测控学报, 2006,25(5):32-36. CHEN Wen-li, SU Dong-lin. Beam Position Arrangement and Optimization for Phased Array Radar in Search Mode[J]. Journal of Spacecraft TT&C Technology, 2006,25(5):32-36.
[17] BARTON D K. Modern Radar System Analysis[M]. Norwood: Artech House, 1989:315-319.
[18] 王路,邢清华,毛艺帆. HTV-2目标特性分析[J]. 飞航导弹,2014(7):22-71. WANG Lu, XING Qing-hua, MAO Yi-fan. Analysis of HTV-2 Target Characteristics[J] .Aerodynamic Missile Journal, 2014(7):22-71.
Detection Ability Analysis on Long Range Early-Warning Phased Array Radar
YU Chen-longa, TAN Xian-sib, LI Fana, WANG Hongb, QU Zhi-guob
(Air Force Early Warning Academy, a. Graduate Management Department; b. No.2 Department, Hubei Wuhan 430019, China)
Search ability of long range early-warning phased array radar without indication information is studied, based on the background of near space hypersonic targets defense. Design principle and validation method of radar search parameters are deeply discussed in the case of near space work pattern, including search screen, pulse width, signal cycle and search frame period, where compensation relationship of pulse width changing with beam pointing is deeply analyzed and the shortest distance through the search screen from within different height and elevation and the minimum number of scanning when a target is successfully captured are formulated. Finally, radar detection ability is analyzed through the simulation with HTV-2 target characteristics as priority information. Results show that radar has the whole capacity to capture the target when coming right against the face, while it should take the mode of TWS when coming from behind the head space.
near space; hypersonic target; long range early-warning phased array radar; search parameters; cross-screen distance; scanning number
2016-01-22;
2016-06-23 作者简介:喻晨龙(1989-),男,湖北应城人。博士生,主要从事临近空间高超声速目标预警探测方面研究。
10.3969/j.issn.1009-086x.2017.02.021
TN958.92
A
1009-086X(2017)-02-0134-08
通信地址:430019 湖北省武汉市黄浦大街288号 E-mail:342583844@qq.com
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
信息通信技术(2022年2期)2022-05-31
凤凰动漫(军事大王)(2022年1期)2022-04-19
煤气与热力(2021年3期)2021-06-09
现代信息科技(2021年21期)2021-05-07
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
舰船科学技术(2020年3期)2020-04-22
电子制作(2019年24期)2019-02-23
雷达学报(2018年3期)2018-07-18
