
基于时间约束的弹道导弹目标识别任务流程设计方法
2017-05-10 07:44:59李陆军丁建江吕金建赵龙华
装甲兵工程学院学报 2017年2期
李陆军, 丁建江, 吕金建, 马 梁, 赵龙华
(1. 空军预警学院, 湖北 武汉 430019; 2. 93975 部队, 新疆 乌鲁木齐 830000;3. 95269 部队, 广东 广州 510000)
基于时间约束的弹道导弹目标识别任务流程设计方法
李陆军1,2, 丁建江1, 吕金建1, 马 梁1, 赵龙华3
(1. 空军预警学院, 湖北 武汉 430019; 2. 93975 部队, 新疆 乌鲁木齐 830000;3. 95269 部队, 广东 广州 510000)
结合弹道导弹目标特性和预警装备特点,提出了一种基于时间约束的弹道导弹目标识别任务流程设计方法。首先,从弹道导弹目标特性、预警装备性能和拦截武器性能3方面分析了反导过程的时间约束性;其次,给出了识别任务流程设计原则,重点分析了微动特征和成像特征的约束条件,在此基础上提出了弹道导弹目标识别任务流程设计方法;最后,提出了基于STK(Satellite ToolKit)的预警雷达识别任务流程推演设计方法,并结合典型作战场景,设计了具体的雷达识别任务流程。研究表明:该流程设计方法具有明显的时间约束特性,能够用于反导作战中战法设计。
时间约束; 目标识别; 识别特征; 任务流程; STK
目标识别在反导中占有重要的地位,是反导作战的关键环节,决定反导的成败。目标识别贯穿反导全程,随着作战进程推进,识别装备、识别对象动态变化,不同阶段的识别内容、要求各具特点。在反导作战中,单一装备难以完成识别任务,需要多装备合力完成,因此,弹道导弹识别不仅要关注局部,更要综合考量整个反导全程。目前,有关弹道导弹目标识别的研究主要集中在特征提取、目标分类和综合识别等方面[1-3],研究成果突出;然而相关研究只针对弹道导弹某一飞行阶段或某个特征,未针对整个反导全程研究目标识别,预警装备成孤立个体、识别特征在整个反导过程中的位置不明确等因素势必会影响整体作战效能的发挥。
识别任务流程的设计能够将整个反导系统串联在一起,从导弹发射前到落地明确不同识别特征位置,为反导作战提供依据。其主要利用战法工程设计思想[4-9],战前对识别任务进行规划,通过明确作战关键节点的任务、要求和时限,以及装备间作战活动和交互关系,实现装备间协调统一,达成一体化作战目的。为此,笔者提出一种基于时间约束的弹道导弹目标识别任务流程设计方法,并通过典型作战场景下的推演分析,设计雷达识别任务流程。
1 弹道导弹目标识别的时间约束性
弹道导弹目标识别具有强烈的时间约束性,反导系统只有在规定的时间内完成识别任务,才是有效的识别;否则,对反导作战无益。笔者主要从弹道导弹目标特性、预警装备性能和拦截武器性能3个方面分析弹道导弹目标识别的时间约束性。
1.1 弹道导弹目标特性约束
弹道导弹以其速度快、威力大,能够迅速达成战略目的,而具有其他武器所无法比拟的作战优势。典型远程弹道导弹的整个飞行时间大约在30 min:弹道导弹发射以助推段为起点,助推段飞行时间为3~6 min;中段为弹道的最长段,飞行时间为15~20 min;再入段为进入大气层到打击目标的飞行段,飞行时间为1~1.5 min。因此,从整个飞行阶段或单个飞行段来说,留给反导系统的反应时间、识别时间非常短,这对反导系统提出了很高要求。
1.2 预警装备性能约束
以美国为例,现有的反导装备主要是预警卫星、远程预警雷达和多功能相控阵雷达等,其结构庞大,造价昂贵,自身性能有限。若经费紧张,则势必会造成部署反导装备有限;装备自身探测范围有限,只有目标进入探测区间,才能发挥其作战效能。
1.3 拦截武器性能约束
以美国为例,目前参与反导拦截的装备多种多样,覆盖不同空间层次,以满足不同拦截需求,实现全程反导、全程拦截的作战目标。目标识别为拦截服务,受拦截弹的部署、性能约束,目标识别必须在拦截窗口完成,如果越过拦截窗口进行目标识别,将失去其本身的意义。
2 弹道导弹目标识别任务流程设计
识别任务流程设计主要是规划战前、战中和战后的各个阶段,做什么?谁来做?怎么做?何时做?它是迅速、有效、有序制定反导预案的重要依据。
2.1 流程设计原则
2.1.1 针对性
弹道导弹识别任务流程与特定作战环境、作战部署紧密联系,目标改变、装备部署调整等都将改变整个识别任务流程。因此,识别任务流程设计必须瞄准特定的场景,在确定目标、装备部署后,才能进行识别任务流程设计;否则,设计流程没有依据,且无法指导反导作战。同时,若条件、战情改变,就需要重新设计识别任务流程。
2.1.2 全局性
弹道导弹目标识别贯穿整个反导过程,有症候识别、星弹识别和真假弹头识别等,识别对象、内容随着时间推进变化,不同阶段的识别装备不同,用于识别的特征也不同,各个识别环节紧密相连,上一阶段的识别效果对后续的作战影响较大。如:若星弹识别出现偏差,则会直接影响整个反导全局,导致“未战先败”;若真假弹头识别出现差错,诱饵被拦截,则会浪费拦截资源,导致错失战机。因而,识别任务流程应着眼整个反导全程,只有精密设计每个阶段,才能整体提升反导作战效能。完整的识别任务流程最早始于战前的情报收集、重点部位监视和发射症候识别,一直持续到战后的识别效果分析,贯穿整个反导全程。
2.1.3 时间约束性
由上述分析可知:弹道导弹目标具有明显的时间约束性,战机稍纵即逝,留给人为参与或反应的时间极其有限。反导系统一体化、自动化运行是有效的解决方法,这就需要战前对整个反导过程进行精密规划,规划某时间约束下采用何种装备和识别特征。
2.1.4 完备性
弹道导弹目标识别任务流程是整个反导有序进行的重要依据,是针对特定目标的战前规划,方便战时调用。在进行流程设计时,必须考虑目标在多种突防方式下的应对措施以及不同弹道(高抛、低抛、标准弹道)下的识别任务流程;否则,设计的识别任务流程完备性较差,无法应对复杂多变的战场态势。
2.2 特征约束分析
要进行识别任务流程设计,首先应深入分析飞行中不同阶段的识别对象、目标和内容等,据此分析装备的有效探测范围和特征的运用限制条件。特征的运用限制条件很多,本文主要结合微多普勒调制带宽和目标特征作用距离2方面进行分析。
2.2.1 微多普勒调制带宽
一个周期内,微多普勒频率最大值和最小值之差的绝对值即为微多普勒调制带宽[10-11],可表示为
(1)
式中:dp、dt分别为目标散射中心到质心的垂直和水平距离;θ为锥旋运动时的进动角;α为雷达视线与目标进动轴间的平均视线角;ω为目标进动角速度;λ为雷达波长。
微多普勒调制带宽Bmd反映了回波多普勒展宽程度,其值越大,雷达越易检测到这种微动变化。在弹道导弹目标飞行过程中,目标尺寸和进动参数不变,只有α随着目标移动不断变化,不同时刻的Bmd差异较大。若当前时刻的Bmd∈[Bmax/2,Bmax](Bmax为最大调制带宽),则认为当前时刻属于“易检测段”;反之,属于“不易检测段”。当目标对象和雷达部署位置变化时,目标微多普勒特征“易检测段”也是不同的,因此可以根据雷达的部署位置找出目标微多普勒“易检测段”,为微多普勒特征运用提供依据。
2.2.2 目标特征作用距离
在弹道导弹目标飞行期间,目标信噪比动态变化,目标识别需建立在对目标进行稳定跟踪的基础上。在弹道导弹攻防中,一般认为信噪比在17 dB以上时可对目标进行稳定跟踪,目标检测时的信噪比要求在15 dB以上,成像时的信噪比要求在20 dB以上,因此可以根据雷达方程估算不同识别特征有效作用距离[10-15]。
以雷达成像[14-15]为例,雷达在成像时交替发射窄带和宽带信号,宽带成像作用距离由运动补偿精度决定;窄带用于跟踪,为宽带提供引导信息,最大精度跟踪距离决定了其引导距离。宽带时运动补偿比保精度跟踪的信噪比要求略低,然而一般宽带信号能量大于窄带信号,如果成像和跟踪的信噪比相同时,宽带信号仍然可以进行保精度补偿,而窄带信号已很难进行保精度跟踪。经过分析可知:宽带成像作用距离由窄带信号的跟踪距离决定,因此可以用窄带跟踪距离估算宽带成像作用距离。
2.3 基于时间约束的识别任务流程设计
由于弹道目标的特殊性,涉及装备类型较多,不同阶段可采用的识别特征不同,因此,笔者提出了一种图形化描述方法,用于设计目标识别任务流程,方便军事人员、技术人员以及战法设计人员进行交流。该方法从识别内容、识别装备和识别特征3个维度描述识别任务流程,横向维为弹道目标飞行时间,清晰反映不同特征、装备的时间约束特性。图1为基于时间约束的弹道导弹目标识别任务流程,可以看出:识别对象、装备和特征等随着时间推进而改变。
图1 基于时间约束的弹道导弹目标识别任务流程
图1中:to为弹道导弹发射时刻,在此之前导弹发射症候识别;ta为助推段结束时刻,to和ta之间分别进行发射位置、射向、星弹以及弹型识别;ta和tj之间为弹道导弹飞行中段区间,其中tb和tc之间为预警雷达的探测区间,可以提取的特征有速度特征和弹道特征;td和tk之间为雷达2探测区间,ti和tl之间为雷达3探测区间,2个区间或存在交叉部分,如图1中阴影部分所示。在整个导弹飞行过程中,可以获取的雷达识别特征有雷达散射截面积(Radar Cross Section,RCS)、弹道特征、惯量比、质阻比、微动特征、一维像及二维像,由于雷达目标相对位置变化以及装备性能和特征获取要求,不同识别特征获取时间区间有差异。tl为进行有效拦截的时刻,为简化研究程序,图1仅设置了一个拦截点,然而在实际反导过程中可以设置多个拦截点,需要根据目标特性和武器装备性能制定拦截任务规划。
3 基于STK的预警雷达识别任务流程推演设计
3.1 基于STK的预警雷达识别任务流程设计
STK(Satellite ToolKit)的可视化仿真技术具有较强的分析能力、形象的三维显示以及良好的可扩展性,在航空、航天领域得到了广泛应用。因此,笔者采用STK作为弹道导弹目标的预警雷达识别任务流程推演设计平台,图2给出了基于STK的预警雷达识别任务流程。首先,依据作战目的,编辑弹道导弹发点、落点以及弹道类型,产生典型场景下的弹道,或者从外部导入导弹数据,建立地方攻击的场景;其次,依据实际要求,部署作战实体,设定雷达的部署位置、观察距离、覆盖范围、波束形式和宽度等主要参数,形成应对作战态势;最后,执行仿真推演,分析识别任务流程是否满足要求,满足则结束,不满足则对目标、装备等参数进行调整,重新推演,直至满足要求为止。
图2 基于STK的预警雷达识别任务流程
3.2 典型场景下预警雷达识别任务流程推演设计
由于整个反导过程涉及装备种类多样,技术复杂,在进行流程设计时需要多领域专家的有效配合,因此研究中无法有效进行完整的识别任务流程设计。本文以典型的作战场景为例,重点围绕预警雷达设计识别任务流程。图3为反导模式下雷达对弹道导弹目标的探测场景。
图3 反导模式下雷达对弹道导弹目标的探测场景
3.2.1 弹道生成
由于弹道导弹的实际数据获取困难,因此主要通过仿真获取弹道数据。假设目标发点为(-120,36),落点为(118,34),目标采用标准弹道进行突防,根据弹道方程仿真计算飞行的实时弹道,作为STK弹道生成的依据,图4、5分别为弹道距地表高度和地心坐标系下弹道轨迹。
图4 弹道距地表高度
图5 地心坐标系下弹道轨迹
3.2.2 装备部署及威力参数设置
如图3所示,远程预警雷达部署位置为(164,42),威力范围在4 000 km;多功能相控阵雷达部署位置为(137,47),威力范围在2 000 km;一维像距离作用范围在1 400 km;二维像距离作用范围在800 km。
3.2.3 装备和特征作用时间分析
远程预警雷达主要搜索、跟踪中段目标,能够实现对导弹目标735.67 s的探测时间,占整个飞行全程的29.6%。多功能相控阵雷达对目标探测时间为411.488 s,占整个飞行全程的16.6%;一维像对目标作用时间为301.226 s,占整个飞行全程的16.6%;二维像对目标作用时间为172.011 s,占整个飞行全程的7%。从总体上来说,2部预警装备只能实现对目标46.2%的作用时间,时间约束性较强,留给决策者的时间有限,战机稍纵即逝,这与防空作战有着很大的差别。表1为通过STK仿真获得的预警装备在弹道导弹飞行段的作用时间,其中:RCS和弹道特征只要满足弹道导弹跟踪要求即可获取,其作用时间和装备的探测跟踪时间一致;惯量比主要作用在飞行中段,其作用时间与装备中段探测时间一致。
表1 预警装备在弹道导弹飞行段的作用时间
需要说明的是:本文考虑的情况比较理想,假定已经建立完备的基础数据库和特征库等,只要满足获取条件,即可用于识别;然而实际中目标数据库建立复杂,需要较长时间的积累,因此部分特征不具备识别条件,在分析时可以不考虑。
3.2.4 微动特征分析
通过式(1)计算雷达对导弹的微多普勒调制带宽Bmd,将位于Bmax/2以上的区间作为微多普勒“易检测段”。图6为雷达对导弹的微多普勒调制带宽随时间变化曲线,可知:288.75~1 506.85 s和2 040.15~2 457.15 s两个区间段为微多普勒“易检测段”。由于第1个区间时间远远超出多功能相控阵雷达的威力范围,因此应将第2个区间与雷达探测区间重叠部分作为实际中的易检测段。
图6 微多普勒调制带宽随时间变化曲线
3.2.5 基于时间约束的弹道目标雷达识别任务流程
根据上述特征分析结果,设计典型场景下弹道导弹目标的雷达识别任务流程,如图7所示,该流程充分反映了参与识别的装备、作用时间范围和不同特征作用区间等,详细给出了何时采用何种装备以及何种识别特征具备参与识别条件,为反导作战目标识别运用提供了重要依据。其中:纵坐标给出了参与识别装备和可以提取的识别特征;为了凸显多功能相控阵雷达不同识别特征发挥作用时间的区别,横坐标上预警雷达和多功能相控阵雷达的时间刻度没有按照比例进行设置。
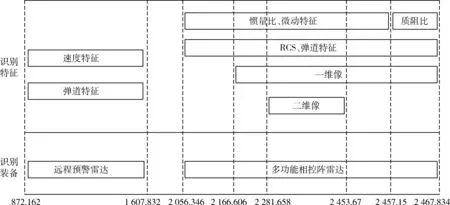
图7 典型场景下弹道导弹目标的雷达识别任务流程
4 结论
笔者提出了一种基于时间约束的弹道导弹目标识别任务流程设计方法,能够对未来不同时间段的识别任务进行有效规划,为反导作战目标识别提供重要依据。然而本文的任务流程设计是基于体系作战对反导全程参与识别的装备、识别任务和识别特征等进行的粗规划,若要实现在装备中自动化执行,从而减轻人为参与的负担,还需在以下3个方面进行深入研究:
1)反导时间有限,用于识别的时间更是有限,需要在战前固化不同识别模式参数设计,战时直接调用或微调即可。因此,需要明确任务流程中各特征下模式参数,如数据率、积累时间和信号形式等,确定具体场景下各模式消耗的时间资源,作为战时调整的重要依据。
2)结合不同突防方式变化,设计基于时间序列的特征运用流程,战时直接根据战场态势分析来选择对应的识别特征运用流程,作为装备顺序执行不同任务模式的依据。
3)识别方法的选择直接影响目标识别效果,而最优的识别方法通常与具体的应用场景、战情紧密相连,因此需要结合具体场景,综合考虑目标先验信息多寡、目标群复杂程度,选择合适的识别方法和融合方法。
[1] 吕金建,丁建江,项清,等. 弹道导弹识别技术发展综述[J].
探测与控制学报,2010,32(4):7-14.
[2] 高乾,周林,王森,等.弹道导弹中段目标特性及识别综述[J].装备指挥技术学院学报,2011,22(1):78-82.
[3] 冯德军,陶华敏,王阳.基于结构特征的弹道目标雷达识别技术[J].航天电子对抗,2012,28(2):1-4.
[4] 沙基昌,毛赤龙,陈超.战争设计工程[M].北京:科学出版社,2009.
[5] 胡晓峰.战争工程论[M].北京:国防大学出版社,2013.
[6] 陈超,沙基昌,焦波,等.战争设计工程中多层次任务分解方法[J].火力与指挥控制,2009,34(2):24-27.
[7] 沙基昌,毛赤龙,吴永波,等.战争设计工程技术研究[J].系统工程理论与实践,2005(6): 66-70.
[8] 刘新建,毛赤龙.战争设计工程中从定量到定性反思方法[J].火力与指挥控制,2010,35(8):4-7.
[9] 刘新建,陈超,沙基昌.战争设计工程中定性定量相结合方法研究[J].数学实践与认识,2010,40(2):119-125.
[10] 马梁,王雪松,李永祯,等.雷达部署对进动目标微多普勒频率的可测性分析[J].国防科技大学学报,2011,33(2):54-59.
[11] 马梁.弹道中段目标微动特性及综合识别方法[D].长沙:国防科学技术大学,2011.
[12] 李陆军,丁建江,吕金建,等.弹道导弹目标特性研究[J].飞航导弹,2015(6):34-39.
[13] 张平定,孙佳佳,童创明,等.弹道中段目标雷达综合识别研究[J].微波学报,2015,31(2):20-23.
[14] 郑建成,王党卫,马晓岩.两种自旋弹头ISAR成像方案性能的比较[J].现代雷达,2013,35(7):36-41.
[15] 冯德军.弹道中段目标雷达识别与评估研究[D].长沙:国防科学技术大学,2006.
(责任编辑: 尚彩娟)
Design Method of Ballistic Missile Target Identification Task Process Based on Time Constraint
LI Lu-jun1,2, DING Jian-jiang1, LÜ Jin-jian1, MA Liang1, ZHAO Long-hua3
(1. Academy of Air Force Early Warning, Wuhan 430019, China; 2. Troop No.93975 of PLA, Urumqi 830000, China;3. Troop No.95269 of PLA, Guangzhou 510000, China)
Based on specialties of ballistic missile target and characteristics of early warning equipment, a design method of ballistic missile target identification task process based on time constraint is proposed. Firstly,from three aspects of ballistic missile target properties, early warning equipment performance, and intercept weapon performance, time constraint of anti-missile process is analyzed. Then, design principles of identification task process are given, constraint conditions of micro-motion feature and imaging feature are analyzed. Based on that, design method of ballistic missile target identification task process is given. Finally, a design procedure of early warning radar identification task process based on STK (Satellite ToolKit) is given, and the radar identification process in typical combat scene is designed. The study shows that the task process design method has time constraint characteristic, and can be used for tactics design of anti-missile combat.
time constraint; target identification; identification feature; task process; STK
1672-1497(2017)02-0068-06
2016-10-26
国家自然科学基金青年科学基金资助项目(61401503,61602506); 中国博士后基金资助项目(20110491889); 全军军事类研究生资助课题
李陆军(1986-),男,博士研究生。
TJ761.3
A
10.3969/j.issn.1672-1497.2017.02.015
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
军事文摘(2022年20期)2023-01-10 07:18:38
小哥白尼(军事科学)(2020年3期)2020-07-27 01:55:22
小哥白尼(军事科学)(2020年4期)2020-07-25 01:25:22
小哥白尼(军事科学)(2020年5期)2020-05-22 06:23:28
小学科学(学生版)(2019年3期)2019-03-30 01:39:26
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
系统工程与电子技术(2016年7期)2016-08-21 13:59:06
火控雷达技术(2016年3期)2016-02-06 02:30:26
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
