
Efficient Packet Scheduling Technique for Data Merging in Wireless Sensor Networks
2017-05-08 13:18AkilaSheelaAdilineMacriga
China Communications 2017年4期
V.Akila, T.Sheela, G.Adiline Macriga
1 Computer Science and Engineering, Bharath University, Chennai, India
2 Information Technology, Sri Sai Ram Engineering College, Chennai, India
* The corresponding author, email: akila_be@yahoo.co.in
I. INTRODUCTION
WSNs consist of densely deployed, lowcost, low-power, multifunctional sensors.These sensors are randomly deployed over a field without a pre-configured physical infrastructure. Each of these sensors has the capabilities for monitoring the environment,and then collects data and sends data to the sink [12]. Energy consumption on uploading data is non-uniform among sensors. It strongly depends on the network topology and the location of the destined data sink. Thus how to efficiently aggregate the information from the scattered sensors is generally referred to as data gathering. WSNs have emerged as a new information-gathering model for taking spatial and temporal measurements of a given set of parameters, such as temperature, of a field.Typically, sensing the field and uploading data to the sink are the two major energy consuming task in WSNs [1] [5]
Data aggregation is the power-saving mechanism.It is the process of combining the data coming from various sources and en route them after removing redundancy, such as to improve the overall network lifetime. This can significantly help to reduce the consumption by eliminating redundant data. The original idea is to aggregate multiple sensing data by performing algebraic or statistical operations such as addition, multiplication, median, maximum, minimum, and mean of a data set, etc.A subset of nodes, called aggregator nodes,build a backbone and are responsible for the data stream. The aggregator nodes are selected to balance the load among all nodes [3] [7].
The authors proposed an Efficient Packet Scheduling Technique for Data Merging in WSN. Packet Scheduling is used to schedule data packets based on their priorities and it minimizes end to end delay.
Batteries are the major energy sources in most WSNs. Therefore it is usually impossible to recharge or replace batteries when they discharge [10]. Thus, solving the efficient-energy coverage (EEC) is an important problem for a WSN. Therefore, it is necessary to schedule the activities of the sensors in a WSN to save the network lifetime and energy consumption.Thus with the data scheduling the energy consumption of sensor networks with high data rates is reduced [2].
Sensor nodes with resource constraints in Wireless Sensor Networks need to schedule different type of packets such as real-time and non-real-time data packets is fundamental to reduce sensors energy consumptions and endto-end data transmission delays.[11][13].Data aggregation which reduces sensor energy consumption and data transmission delay, packet scheduling at sensor nodes is highly important since it ensures delivery of different types of data packets based on their priority and fairness with a minimum latency [4].The various issues arises in WSNs are Node failure, Energy conservation, Network life time, Latency and Collisions.
II. LITERATURE REVIEW
Joon-Woo Lee et al. [2] have proposed an ant colony-based scheduling algorithm (ACB-SA)to solve the EEC problem. Their algorithm is similar to conventional ant colony optimization algorithm, optimized for solving the EEC problem. The proposed algorithm represents a more realistic approach for solving the EEC problem in heterogeneous sensor set and use the probability sensor detection model.
Bo Yu et al. [3] have proposed a collision-free distributed scheduling algorithm for data aggregation in wireless sensor networks based on maximal independent sets. The proposed algorithm minimizes the time latency using a greedy strategy. The significant improvement of this algorithm is contributing to an additive factor instead of a multiplicative factor. The proposed algorithm follows an adaptive strategy for updating the schedule when nodes fail or new nodes join in a network. The proposed algorithm is the first distributed algorithm for data aggregation scheduling and outperforms other aggregation scheduling algorithms. However the scheduling after node failures is not successful.
Nidal Nasser et al. [4] have proposed a Dynamic Multilevel Priority (DMP) packet scheduling scheme. In the proposed scheme,each node in the level of virtual hierarchy has three levels of priority queues except those at the last level in the zone based topology of WSNs. Real-time packets can preempt data packets in other queues and are placed into the highest-priority queue. Non-real-time packets based on a certain threshold of their estimated processing time and are placed into two other queues. Leaf nodes cannot receive data from other nodes have two queues for real-time and non-real-time data packets and thus, reduce end-to-end delay. DMP packet scheduling scheme outperforms conventional schemes in terms of average waiting time and end-to-end data transmission delay. However there occurs deadlock situation which degrades the performance of task scheduling schemes in terms of end-to-end delay.
Dimitris Tsitsipis et al. [6] have proposed a data aggregation technique without size reduction. The proposed technique utilizes the maximum allowed packet size by appending the incoming packets to already buffered packets,until the maximum packet size or a maximum waiting time is reached. The overall gain in energy consumption is achieved by reducing the number of transmissions and redundant header data. The technique shows gain up to 56% in packet loss and 46% in energy consumption. However the transmission energy is critical, since the radio is the most energy-consuming component of a WSN application.
Xiaohua Xu et al. [8] have constructed a routing tree and proposed two scheduling algorithms that can generate collision-free link schedules for data aggregation. They prove that the delay of each algorithm in a reduced communication graph of the original network.The proposed algorithms are asymptotically optimum on delay in random wireless sensor networks. However the delay is not reduced completely.
III. OVERVIEW
We propose an energy efficient scheduling technique for the data aggregation scheme in WSNs. Initially the data packets are processed using Time-Division Multiple Access(TDMA)scheme. Here time slots are assigned to the nodes at different levels. Next, the data packets are scheduled in a priority queue. In this case three levels of queues were considered based on the priority. The tasks in the queues are scheduled such that the real-time packets go to priority 1, non-real-time data packets at remote levels go to priority 2 and non-realtime data packets at local levels go to priority 3.Using the timeslots the transmission of links can be done. Followed by this the incoming data packets having the same final sink nodes,were merged to the higher level nodes in the form of buffered data packets such that reduced number of transmission is done. Thus from the above objectives an energy efficient transmission of a large data packet is achieved.
Fig. 1 represents the proposed block diagram. TDMA scheme is used along with packet scheduling by dividing the task to three queue based on the priority. The data are merged and are transmitted to Base Station(B) based on priority and timeslots defined by TDMA scheme.
IV. TDMA BASED SCHEDULING TECHNIQUE
In our proposed technique, aggregated data packets are processed using TDMA scheme with variable-length timeslots. Here the data packets are transmitted from the lowest node level to B through the nodes of intermediate level. Hence, the nodes at the lower level nodes have fewer tasks and processing requirement compared to the upper and intermediate level nodes.
Taking this into consideration, the length of timeslots at the lower-level node is set to lower value compared with the timeslot length of upper-level nodes. Moreover, the real-time and mission-time critical applications should not be aggregated in intermediate nodes, since they should be transmitted to end users with a minimum end-to-end delay. Hence, the duration of timeslots at different level for real time data is almost equal and short.
The sink sends a periodic broadcast signal so that every sensor node can receive it.Sensor nodes that receive the broadcast of the sink synchronize themselves to the sink. Their clock drifts are estimated with their linear regression analysis of broadcast times. Directional antenna is used to avoid hidden and exposed terminal problem. The directional antennas focus energy in a particular direction so that unfair channel allocation and wastage of channels between each node can be avoided.
V. CONSTRUCTION OF THREE-LEVEL QUEUES

Fig. 1 Block diagram
The proposed scheduling scheme assumes that nodes are effectively organized in a hierarchical structure. Nodes that are located at the same level are supposed to be at the same hop distance from B. For example, nodes that are in level 1 and level 2 are consider as one hop and two hops away from the B. Data Packets of nodes at different level are processed with the help of TDMA scheme. For example,nodes those are located at lowest and second lowest level can be assigned timeslots 1 and 2 respectively. The number of level in the ready queue of a node is three: priority 1(P1), priority 2(P2), priority 3(P3) queues. Real time data packets are processed using First Come First Serve (FCFS) and it is the highest priority queue goes to P1. Non real time data packets are considered as second highest priority queue that comes from sensor nodes at lower level go to P2. Non real time data packets are referred as lowest priority queue that are sensed at a local node go to P3.

Fig. 2 Scheduling of data with three level queues
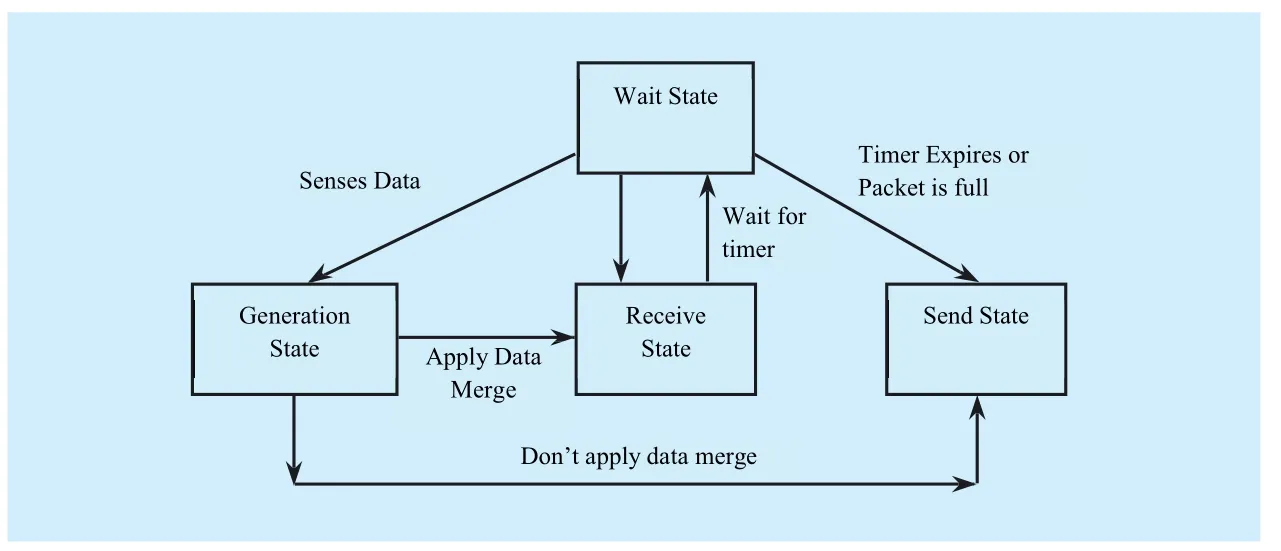
Fig. 3 State diagram of a node
In the proposed technique, queue sizes vary according to application requirement. As preemptive priority scheduling invite overhead due to the framework storage and swapping in resource constraint sensor networks, the size of the ready queue for preemptive priority schedulers is predicted to be smaller than the preemptable priority schedulers. The notion behind this is that the highest-priority real-time or emergency tasks hardly occur.Hence, they are placed in the preemptive priority task queue (P1) and can preempt the presently running tasks. As, these processes occur rarely the number of preemption will be less. Moreover, the non-real time data packets that arrive from the sensor node at lower level are placed in preemptable priority queue (P2).The processing of these data packets can be preempted by the uppermost priority real-time tasks and also after a certain interval of time in case lower priority queue P3do not get processed due to frequent arrival of higher priority data packets.
Real-time data packets are generally processed in FCFS manner. Here, each data packet has an ID which incorporates two parts namely level ID and node ID. In case two equal priority packets arrive at ready queue at same moment, then the data packet which is generated at lower level will have higher priority. This trend reduces the end-to-end delay of the lower level packet or task to reach the base station. For two packets or tasks at same level, the smaller packet (with respect to data size) will have higher priority.
Fig. 2, a data packet sensed by any sensor node is scheduled among three levels in the ready queue based on priority. After that, a number of data packets in each level of the ready queue are scheduled accordingly. For example Data packet 1 and 3 are placed in Queue 1, similarly data packet 2 and 5 are placed in Queue 2 and so on.
VI. DATA MERGE TECHNIQUE
The data merge can be applied in case the overlapping path exists in the route of data packets from their aggregated nodes towards their sink nodes. In this case, data from different levels can be combined before being forwarded towards the B. Data merge is applied when the incoming packets from different underlying level is having the same destination.
The state diagram of Fig. 3 illustrates the different states of a node in the network and the transition between the states. A node is in wait state when it does not perform any task.The generation state occurs when any data packets are sensed by the node and creating a new data value for transmission. The receive state occurs when a data values are merged to the already existing data values. The send state is created when the time interval has expired or when the maximum size of merged data packet is exceeded.
In Fig. 4, data packet is sensed at node i, and event occurs. Data packet is sent to node s in upper level. Node h in the node level 1 merge the data and send it to B. Based on the scheduling the data packet which receives higher priority is sent to the node level 1 to transmit to the base station. In this method, all nodes at different levels are capable of generating data values (DVs) and of applying data merge. The selected merging points delays an incoming data packet (merged or not) or generated data packet for a specified time in order to firmly combine it with new incoming (merged or not)packets into a larger merged data packets. In case, the incoming data packets are larger than the remaining available space in the current merged higher level packet, they split into the DVs, which are added one by one to the current merged packet, till the latter is full. The merged packet is then sent to the next upper level node,and the remaining DVs are merged into a new data packet which waits for the arrival of new incoming data packets to be merged. In case the time interval expires or maximum size of the merged data packet is reached, then forwards it towards the B.
VII. THE OVERALL ALGORITHM
7.1 Algorithm

Fig. 4 Representation of four node level with data merge technique and packet scheduling
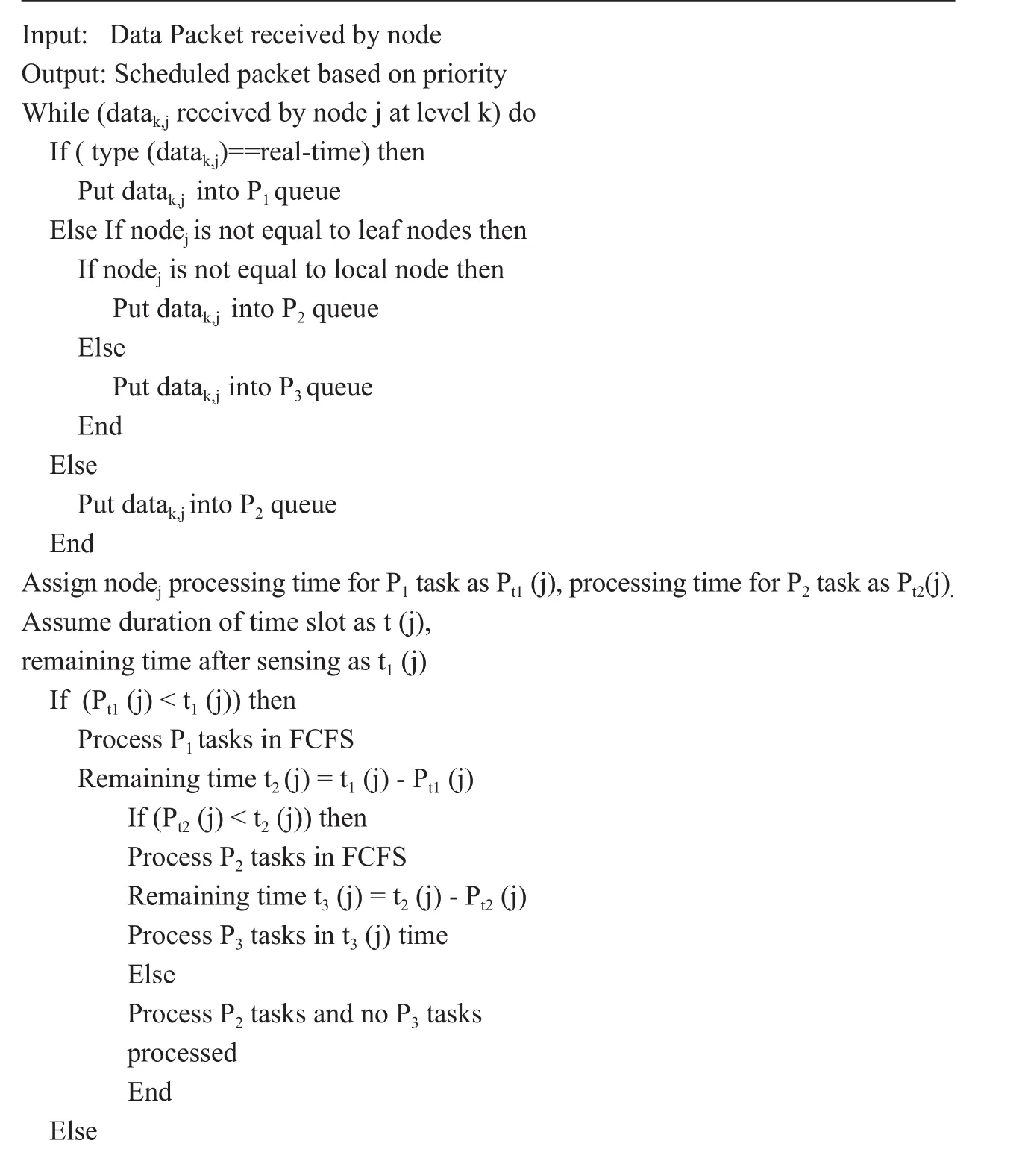
Algorithm 1: Pseudocode for Packet Scheduling

ALGORITHM 2: Pseudocode for DataMerge Technique
7.2 Algorithm explanation
7.2.1 Packet scheduling
7.2.2 Data merge
The node verifies if it is the final sink node then the packet directly sends to the sink node.Otherwise the node verifies if it is allowed to apply data merge and data packet with non-real time data exists then it checks the length of the merged packet. We interchangeably use task and data to represent the data packets. If it is zero then the received packet is the first element to merge. Otherwise check the combined size of the merged and received packet is greater than max length then the received packet is split into DVs and DVs are merged one by one until merged packet is full. The remaining DVs are stored into the new merged packet. If it is less than max length then the received packet is merged into already available merged packet.When the wait time interval expired then the merged packet is sent to the next higher level.
VIII. PERFORMANCE ANALYSIS
8.1. The energy model
We implement the same energy model described in [9].The energy consumption of transmitter (Et) depends on the energy needed to run the transmitter circuitry (Te) and to run the amplifier (Ae). The energy consumption needed to transmit a k-bit packet for the distance of d.

The energy consumption of receiver (Er)depends on the energy to run the receiver circuitry (Te).The Energy Model is shown in the Fig.5.

8.2 End-to-End delay
The end-to-end delay of transmitting different priority packets is formulated using the following scenario. Transmission delay is the time required to place a data from a node into the medium. It is equal to
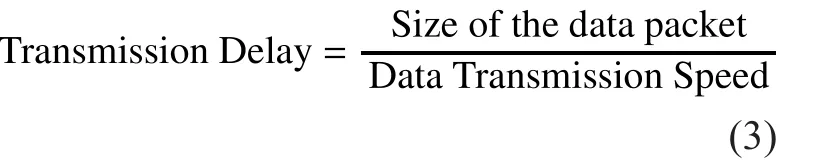
Propagation Delay is the time required to transmit from the source to destination. It is equal to

Delay is calculated using the formula given below

8.2.1 Real-time data packets
Real-time data reaches a node at level i has to be placed in priority 1 queue, a non-real time data currently processing at the node has to be pre-empted and real-time data has to be transmitted without aggregation. End -to-End Delay for one real time task is greater than equal to

wherePSP1(t) is the processing time required to process real-time data at each node, tois the overhead required for preemption ,lidenotes the number of task, time delay required to place the real time data into the transmission medium is ratio of data size (DSP1) to the data transmission speed (Ts) and time delay required to transmit the real time data from source to B is the ratio of distance from source to B (d) to data propagation speed (Ps). Consider the example shown in Fig.4 when a real time data is sensed at node i and is forwarded to B through relay nodessandh. Nodes s andhhave their ownP2queue data and one real-time data available at theP1queue. Real-time data has to be processed in the first transmission slot ofsandh.
8.2.2 Non Real-time Remote Data Packets
Non real-time remote data has to be placed in priority 2 queue. Time delay required to place the data into the transmission medium is ratio of data size (DSP2) to the data transmission speed (Ts), time delay required to transmit the data from source to B is the ratio of distance from source toB(d) to data propagation speed(Ps),PSP2(t) is the processing time required to process non real-time remote data at each node,tois the overhead required for pre-emption and aggregation. End-to-End delay can be processed in the same time slots is greater than equal to

8.2.3 Non real-time local data packets
Non real-time local data at priority 3 queue are processed when there is no data at priority 1 and 2 queue and α consecutive time slots there is no data at priority 1 queue but there are data at priority 2 queue. Time delay required to place the local data into the transmission medium is ratio of data size (DSP3) to the data transmission speed (Ts), time delay required to transmit the data from source to B is the ratio of distance from source to B (d) to data propagation speed (Ps),PSP3(t) is the processing time required to process non real-time local data at each node,tois the overhead required for preemption and aggregation,tiis the length of time slot of node at leveli.

Fig. 5 Radio energy model

Fig. 6 Aggregation tree

8.3 An example
Consider the tree as shown in Fig.6 with 10 nodes with 6 as the base station and 4, 5, 8, 9 and 0 are leaves nodes. The leaves node have two level queues since these node do not receive data from lower level and other intermediate nodes have three level queue. When the node 5 senses real-time data and is forwarded to base station B through intermediate nodes 7 and 1.Since the one real-time data in priority 1 queue of nodes 7 and 1 are transmitted during the first time slot without aggregation.The priority 2 data in the node 4 and 5 is forwarded to node 7.Node 7 receives the data in the priority 2 queue and merges the data till the packet size is reached. The merged packet is forwarded to the next node 1.The remaining data in node 7 has to wait till the next data or maximum waiting time is reached. Node 1 receives data in priority 2 queue from nodes 7 and 8.Node 1 merges the data till the packet size or maximum waiting time is reached and forwarded to the base station.
The local priority 3 data at the nodes 7 and 1 are processed and merged after α consecutive time slots there are data at the priority 2 queue but there is no data at the priority 1 queue. Similarly other nodes are processed and transmitted to the B.
IX. SIMULATION FRAMEWORK
We have implemented the proposed framework in the Network Simulator (NS2).We have implemented the proposed technique under different simulation parameters like high priority packets, Packet Size, Queue size and evaluate it based on several metrics like delay, packet loss, energy consumption, delivery ratio and overhead. The maximum packet size is 100 bytes leaving reasonable space for header as 6 bytes and the data size of the generated packet is fixed at 4 bytes. Waiting time interval is the maximum predefined time that an incoming packet is buffered to wait for new packets. It is assumed as 500ms. The sensor nodes move in a 500 meter x 500 meter region for 100 seconds of simulation time. All nodes have the same transmission range of 250 meters. The simulated traffic is Constant Bit Rate(CBR).Table 1 presents simulation parameters,and their respective values.
We study the performance of our technique under different number of nodes. Simulations were performed for five different values of this parameter: 20,40,60,80 and 100.We also study the performance of our technique under different transmission rate of the data packets.Simulations were performed for five different values of this parameter: 100kbps, 200kbps,300kbps, 400kbps and 500kbps.The selection of aggregation points is driven by the position of nodes in the routing tree. The leaves in the routing tree do not serve as aggregation points and thus they send the packets directly to the next level node. The source of a data packet is also used to define the priority of data packets other than real time packets. The ready queue of each node can hold a maximum of 50 tasks.
9.1 Evaluation Metrics
The following metrics used in our study are:
Packet Delivery Ratio is the ratio between the number of packets received and the number of packets sent. Packet Drop refers the average number of packets dropped during the transmission.Energy Consumption is the amount of energy consumed by the transmitter and receiver circuitry. Delay is the amount of time taken by the nodes to transmit the data packets.Overhead occurs in preemptive priority scheduling due to framework storage and swapping in resource constraint sensor networks.
X. EVALUATION RESULTS
10.1 Comparative results with existing approach
Our results as depicted in figures shows the advantages of the proposed technique compared with existing approaches using a waittime interval as 500ms.Fig.7 and Fig.12 illustrate the delay of packets using different number of nodes and rates respectively. The average delay of EEPSDM approach by varying number of nodes and rates have 95% and 48% lower than SARDAM technique. This is due to the fact that the tasks arrive from the lower level nodes are given higher priority than the tasks at the current node. Thus the average data transmission delay is reduced.Fig.9 and Fig.14 illustrate the packet drop using different number of nodes and rates respectively.The average packet drop of EEPSDM approach by varying number of nodes and rates have 97% and 83% lower than SARDAM technique. The reduction of packet loss is due to the coexistence of priority policies with the data merge technique.
Fig. 8 and Fig.13 illustrate the packet delivery ratio using different number of nodes and rates respectively. The average packet de-livery ratio of EEPSDM approach by varying number of nodes and rates have 68% and 81%higher than SARDAM technique. It is due to the reduced collisions.Fig.10 and Fig.15 illustrates the energy consumption using different number of nodes and rates respectively. The average energy consumption of EEPSDM approach by varying number of nodes and rates have 24% and 14% higher than SARDAM technique. It is higher than SARDAM due to few more processing cycles to place the tasks into three different queues. Fig.11 and Fig.16 illustrate the overhead using different number of nodes and rates respectively. The average overhead of EEPSDM approaches by varying number of nodes and rates have 22% and 51%higher than SARDAM technique.

Table I Simulation Parameters and their values
10.2 Performance of priority queue and data merge technique
The packet congestion is very high when the data are transmitted without merge technique.In SARDAM, it reduces the number of transmissions leading to a lower congestion level. In EEPSDM technique, the packets are processed based on their priority in combination with data merge technique. It is achieved by using the concept of three level priority queues at each node. The priority of the task is assigned based on the source of a data packet other than real-time data packets. Real-time data packets are placed in the priority queue (P1).Non-realtime data packets received from the lower level nodes are known as Non-real-time remote tasks.It is placed in the priority queue (P2).Non-realtime data packets sensed at the current node is known as non-real-time local tasks. It is placed in the priority queue (P3).
Real-time data packets are directly forwarded to the next node and non-real-time data packets are transmitted after applying data merge technique. Real-time data packets are processed with highest priority and it can preempt the tasks in other two low priority queues.It can be processed using FCFS scheduling. It has short processing time. It occurs less frequently so that the size of the priority queue(P1) is less than other queues. It contributes to minimum end to end data transmission delay for real-time tasks. The priority of non-realtime remote task is more than the non-real-time local task. When there is no real-time tasks are available for α slots then P3tasks can preempt P2task for β slots. It avoids the starvation of P3tasks. The minimum delay experienced due to varying nodes and rates are shown in Fig.7 and Fig.12.The packet congestion increases the average delay in rates compare to nodes.
Fig. 9 and Fig.14 demonstrate the better performance of packet drop for both real-time and non-real-time tasks. There is less possibility of packet overflow in the buffer. When the maximum size of the merged packet is reached or the timer interval expires, it automatically forwards the data packet to next level. It reduces the chances of buffer overflow. The priority policy with the data merge technique reduces the possibility of congestion in the network. It also leads to packet loss reduction. Fig.8 and Fig.13 demonstrate the packet delivery ratio for all types of tasks over the number of nodes and rates respectively. The reduction of packet loss leads to consequent increase of packet delivery ratio.
Fig. 10 and Fig.15 demonstrate the small increase of energy consumption due to EEPSDM.The energy consumption is an important issue in WSNs. The main contribution is the energy spent for data transmission. The energy spent for data transmission mainly depends on transmitter and receiver energy. Real-time data packets are directly forwarded without data merge.The number of packet transmission is more in EEPSDM than SARDAM. Therefore there is a small increase of energy consumption. Fig.11 and Fig.16 demonstrate the small increase of overhead due to EEPSDM. Real-time tasks in higher priority queue can preempt the non-realtime tasks. Non-real-time local tasks can preempt the non-real-time remote tasks when there are no real-time tasks for β consecutive time slots. Therefore there is increase of overhead due to preemption.
Memory capacity is very limited in WSNs thus the dynamic memory allocation to three queues balances the memory usage. Directional antennas focus energy in a particular direction so it avoids the wastage of energy in all directions and variable length TDMA scheme so that unfair channel allocation between each node can be avoided. Data Merge is less efficient in low traffic regions since it has the waiting time interval. The number of transmission is reduced due to merging technique and also packet loss is significantly reduced.
XI. CONCLUSION
In this paper, we have proposed an Efficient Packet Scheduling Technique for Data Merging in WSN. Packet Scheduling is used to schedule data packets based on their priorities and it minimizes end to end delay. To reduce the number of transmission, data merge technique is used to merge the data with same destination from all level and transmit to the upper level for further transmission to the destination. In this way, the data are transmitted with minimum delay in transmission and packet loss reduced significantly.
[1] Miao Zhao, Ming Ma and Yuanyuan Yang, “Mobile Data Gathering with Space-Division Multiple Accesses in Wireless Sensor Networks”, IEEE Conference on Computer Communications, pp 1957-1965, 2008.
[2] Joon-Woo Lee and Ju-Jang Lee, “Ant-Colony-Based Scheduling Algorithm for Energy-Efficient Coverage of WSN”, IEEE Sensors Journal,Vol.12 ,no.10, pp 3036-3046,Oct,2012.
[3] Bo Yu, Jianzhong Li and Yingshu Li, “Distributed Data Aggregation Scheduling in Wireless Sen-sor Networks”, IEEE INFOCOM, pp 2159-2167,April, 2009.

Fig. 7 Nodes Vs. Delay

Fig. 8 Nodes Vs. Delivery Ratio
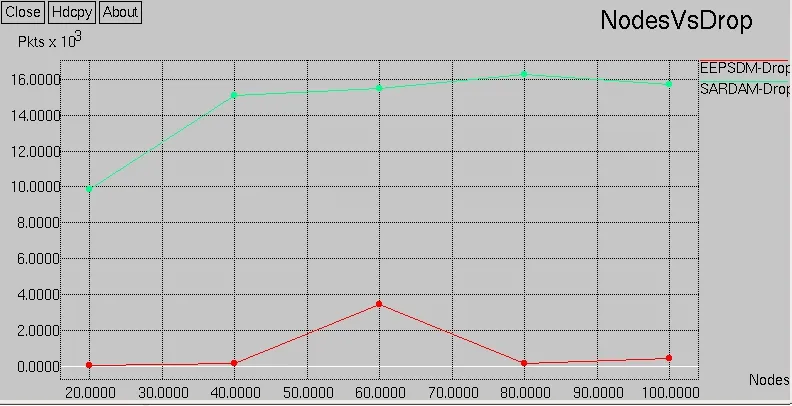
Fig. 9 Nodes Vs. Drop
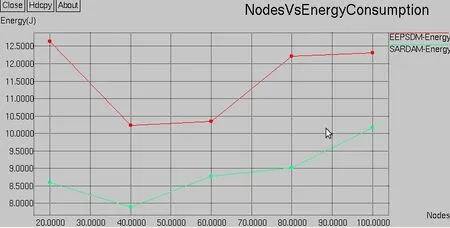
Fig. 10 Nodes Vs. Energy Consumption
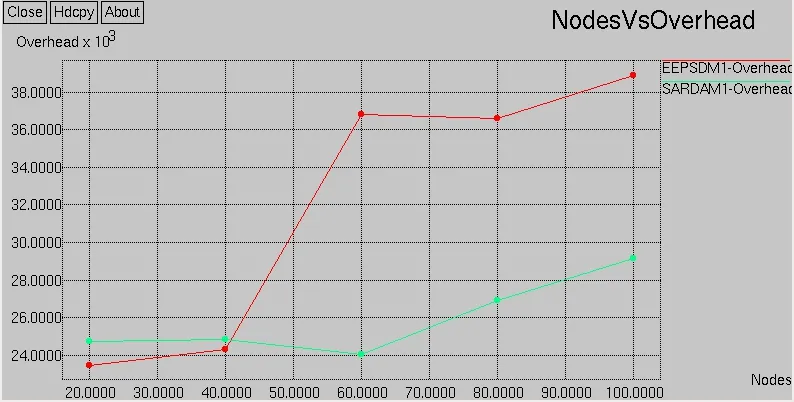
Fig. 11 Nodes Vs. Overhead

Fig. 12 Rate Vs. Delay
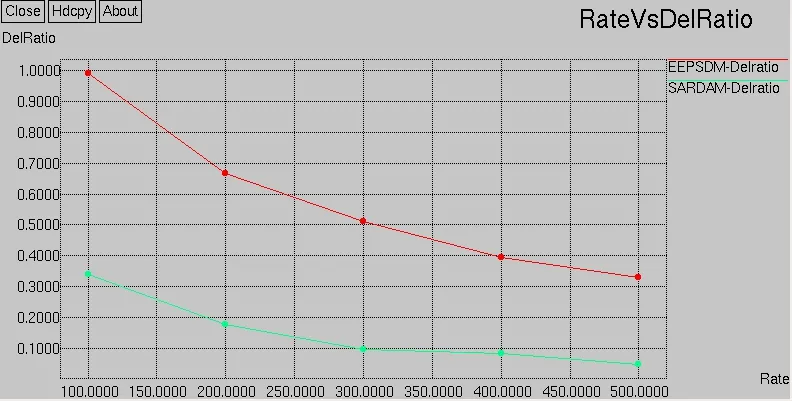
Fig. 13 Rate Vs. Delivery Ratio
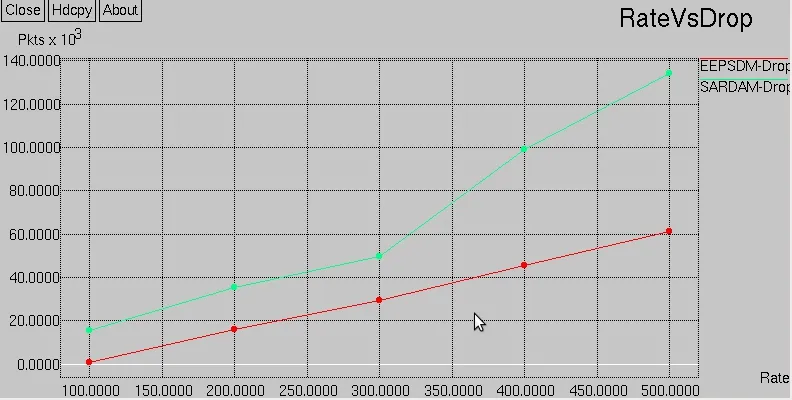
Fig. 14 Rate Vs. Drop

Fig. 15 Rate Vs. Energy Consumption

Fig. 16 Rate Vs. Overhead
[4] Nidal Nasser, Lutful Karim and Tarik Taleb,“Dynamic Multilevel Priority Packet Scheduling Scheme for Wireless Sensor Network”,IEEE Transactions on Wireless Communications,Vol.12,no.4,pp 1448-1459, April,2013.
[5] Poonam Lohan and Rajni Chauhan, “Geography-Informed Sleep Scheduled and Chaining Based Energy Efficient Data Routing in WSNs”IEEE Conference on Electrical, Electronics and Computer Science , pp 1-4,March,2012
[6] Dimitris Tsitsipis, Sofia Maria Dima, Angeliki Kritikakou, Christos Panagiotou and Stavros Koubias , “Segmentation and Reassembly Data Merge (SaRDaM) Technique for Wireless Sensor Networks” IEEE Conference on Industrial Technology (ICIT), pp 1014-1019,March,2012.
[7] Bo Jiang, Binoy Ravindran and Hyeonjoong Cho,“Probability-Based Prediction and Sleep Scheduling for Energy-Efficient Target Tracking in Sensor Networks”,IEEE Transactions on Mobile Computing,Vol.12,no.4,pp 735-747,April,2013.
[8] Xiaohua Xu, Xiang-Yang Li and Min Song, “Efficient Aggregation Scheduling in Multihop Wireless Sensor Networks with SINR Constraints”,IEEE Transactions on Mobile Computing,Vol.12,no.12,pp 2518-2528,Dec,2013.
[9] W.R.Heinzelman, A.P.Chandrakasan and H.Balakrishnan, “Energy efficient communication protocol for wireless microsensor networks”,IEEE Conference on System Sciences, pp3005-3014,Jan,2000.
[10] D.Tsitsipis,S.M.Dima,A.Kritikakou,C.Panagiotou,and S.Koubias, “Data Merge: A data aggregation technique for wireless sensor networks in Emerging Technologies and Factory Automation” IEEE Conference on Emerging Technologies & Factory Automation,pp 1-4,Sep,2011.
[11] S. C.H. Huang, P.J. Wan, C. T. Vu, Y. Li, and F. Yao,“Nearly constant approximation for data aggregation scheduling in wireless sensor networks”,IEEE Conference on Computer Communications, pp 366-372,May,2007
[12] V.Akila,Dr.T.Sheela, “Overview of data aggregation based routing protocols in wireless sensor networks”, International Journal of Emerging Technology and Advanced Engineering,Vol.3,-no.1,pp 186-191,Jan,2013.
[13] V.Akila,Dr.T.Sheela, “Data Aggregation based Scheduling in Wireless Sensor Networks-A Survey”,Journal of Innovative Research and Solutions,Vol.1,no.1,pp 259-265,July,2015.
- China Communications的其它文章
- Efficient Subchannel Allocation Based on Clustered Interference Alignment in Ultra-Dense Femtocell Networks
- X-Band Power Amplifier for Next Generation Networks Based on MESFET
- A VMIMO-Based Cooperative Routing Algorithm for Maximizing Network Lifetime
- Energy Estimation and Optimization Platform for 4G and the Future Base Station System Early-Stage Design
- A Novel Forwarding Method for Full-Duplex Two-Way Relay Networks
- Versatile Routing and Self-Certifying Features Support for Secure Mobility in eXpressive Internet Architecture