冰水情一体化双频雷达测量系统
2017-05-07 09:07:27刘之平郭新蕾崔海涛
水利学报 2017年11期
刘之平,付 辉,郭新蕾,王 涛,崔海涛
(1.中国水利水电科学研究院 流域水循环模拟与调控国家重点实验室,北京 100038;2.大连中睿科技发展有限公司,辽宁 大连 116002)
1 研究背景
河流、湖泊、渠道、水库等冰情的野外原型观测是研究冰水动力学过程和冰水耦合作用机理的重要手段,也是防冰减灾工作的基础。冰厚和水深作为冰情原型观测中重要的观测参数,其测量方法一般可分为接触式和非接触式两种。
接触式测量方法包括传统的打孔、电阻加热线、压力传感器等,这些方法被认为是最为可靠的测量方法,在河流冰情原型观测中应用数十年,但是高纬度地区的冬季气温一般在-30℃甚至更低,冰厚普遍在1 m以上,如我国的黑龙江,上述传统的测量方法就存在效率低、数据量少和工作强度大的缺点[1-4]。崔丽琴等[5]近年来利用空气、冰与水的电阻及温度特性差异规律,改进了传统接触式测量方法的部分缺点,通过分层检测电阻与温度,实现了对冰层厚度、冰层内部温度梯度的接触式连续测量。
非接触式测量方法目前常用的有声呐、卫星遥感和探地雷达等。采用声呐冰情的测量设备主要为ASL Environmental Sciences的SWIP系统,其通过发射和接收超声波脉冲信号来实现冰情测量,优点是可测量冰厚、水深和冰花浓度,缺点是需要安装在河床的固定位置上,且为单点测量,不能全面地反映河道或湖泊的冰情分布特点[6-11]。卫星遥感测量适用于大范围的冰情调查,但是精度较差,例如美国国家海洋和大气管理的IMS卫星系统分辨率为4 km[12],美国国家航空航天局的冰情卫星分辨率为500 m[13],因此卫星遥感测量在海冰厚度测量中应用较多,在河冰厚度测量中相对略少。近年来探地雷达的测量精度不断提高,且具有体积小,使用成本低,测量效率高,适合于大范围冰情测量等特点,在冰情测量中的应用愈加广泛。Arcone[14-15]利用直升机机载探地雷达开展了冰厚测量,Galley等[16]在丘吉尔河入海口利用250 MHz和1 GHz两种频率的探地雷达测量了雪厚和冰厚。Finlay等[17]和Proskin等[18]使用500 MHz的探地雷达测量冰厚,120 MHz测量水深。Holt等[19]使用50~250 MHz的可变频率探地雷达测量了1~7 m的海冰冰厚,300~1300 MHz的雷达测量了0.3~1.0 m的水深。张宝森等[20]采用200 MHz的探地雷达测量了黄河头道拐水文站位置处的冰厚。
尽管探地雷达已经广泛地应用于冰厚和水深的测量,但是目前的单频雷达还无法同时实现冰厚和水深参数的准确测量,冰厚和水深的测量需要2套雷达系统开展2次测量,这不仅增加了工作量,而且不能保证冰厚和水深的测点完全相同,给冰情测量带来误差。为克服上述问题,基于探地雷达技术,开发了冰水情一体化双频雷达测量系统用于冰厚和水深的同时测量,该系统以双频超宽带雷达为核心,同时耦合了高精度的实时动态差分GPS定位系统(RTK)用于实时采集测点的经纬度坐标。
2 设计原理
探地雷达测量的基本原理见图1,由地面上的发射天线将高频带短脉冲形式的高频电磁波定向送入地下,高频电磁波遇到存在电性差异的地下地层或目标体反射后返回地面,由接收天线接收,这时测量介质的厚度t可用下式计算:

式中:H为冰厚或水深;v为雷达脉冲在介质中的传播速度;d为雷达发射天线和接收天线间的距离。
一般来说d的值相对于H很小,可以忽略,因此所测量介质的厚度可用下式计算:


图1 探地雷达测量冰厚和水深的基本原理
式中:c为电磁波在真空中的传播速度;ε为介电常数。
不同物质介电性质差异是探地雷达检测目标介质的先决条件。空气的介电常数为1,水体为80,冰在3~5之间,砂石(泥沙)在3~30之间[21],介电性质差异明显,为探地雷达的准确测量提供了基础。使用探地雷达进行测量时,分辨率和测量深度存在矛盾,即频率低的雷达测量深度较大,但分辨率不够,使得测量准确性稍差,而频率高的雷达可得到较好的分辨率,但测量深度又不理想。为此,综合考虑了河流冰期冰厚和水深的特点,开发了冰水情一体化双频雷达测量系统,并克服了传统测冰雷达三个方面的主要问题,实现了冰水情的一体化测量:
(1)经过分析和试验,确定了100 MHz和1 500 MHz两种频率的雷达可分别用于水深和冰厚的准确测量,同时在雷达天线形状和布置上进行改进,将1 500 MHz雷达天线放置在100 MHz雷达天线的中心,使得水深和冰厚的测点在同一垂线上。具体的雷达接收器和发射天线布置图如图2所示。
(2)通过分时工作避免不同频率雷达间的相互干扰,分时工作系统的控制结构图和分时工作原理如图3和图4所示,100 MHz和1 500 MHz雷达交替工作的周期为15 ms。
(3)在算法上进行改进,针对冰厚和水深综合探测时在时间上表现为相邻道号数据振幅稳定、渐变的特点,采用相关性层位追踪算法,通过分析回波的相关性层位,实现了水深和冰厚的准确测量。
以冰厚连续跟踪为例,雷达行进过程中不断采集新数据,对新采集的数据和之前提取的参考信号做相关处理,获得当前新采集数据中的冰层厚度。假设参考信号为x(k),k=0,1,…,N-1,新采集的数据为y(k),k=0,1,…,N-1,则:

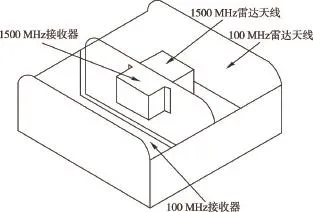
图2 雷达接收器和发射天线布置

图3 双频雷达天线制和接收器控制结构

图4 不同频率的雷达分时交替工作示意图

式中:Hi为冰厚;ti为1 500 MHz天线的雷达回波延迟时间;εi为冰体的介电常数。

式中:Hw为水深;tw为100 MHz天线的雷达回波延迟时间;εw为水体的介电常数。
3 系统组成和测量精度验证
开发的冰水情一体化双频雷达测量系统具体如图5所示,其长1.2 m,宽0.9 m,高0.4 m,重15 kg,适合于野外人工测量和雪地摩托拖拽测量(如图6和图7所示)。其主要包括:(1)数据采集和存储主机;(2)用于测量冰厚和水深的双频雷达;(3)精准测量GPS坐标的RTK系统。在性能上,其冰厚测量范围为0~6 m,水深测量范围为0~16 m,工作温度为-40~60℃。

图5 雷达测量系统

图6 人工测量

图7 雪地摩托拖拽测量
2015年和2016年分别在我国最北端的黑龙江漠河河段(经度121°07′— 124°20′,纬度52°10′—53°33′)对冰水情一体化双频雷达系统的稳定性、耐低温性能和测量精度等进行了全面的测试。黑龙江是我国冰凌洪水灾害频发的河流,自1950年以来,黑龙江平均每3年发生一次大型冰坝,冰坝的长度在10~20 km,壅水高度一般在6~8 m,最高可达13 m,是雷达系统验证的理想河段[22]。
冰水情一体化双频雷达系统冰厚和水深的测量结果分别与传统的L型量冰尺(精度:1 mm)和水位压力传感器(精度:0.5%)进行了对比验证。经过测试,在-25℃的环境温度下,雷达系统具有很好的稳定性,可连续工作8 h以上。精度对比测试共设置21个水深测点和19个冰厚测点,雷达系统与传统测量方法的结果对比如图8和图9所示,21个水深对比测点中,误差在5%以内的测点有15个,占总测点数的71.4%,误差在5%~10%的测点有5个,占总测点数的23.8%。19个冰厚测点中,误差在5%以内的测点有12个,占总测点数的63.2%,误差在5%~10%的测点有4个,占总测点数的21.1%;误差超过10%的测点有3个,分别为图9中的15、17和19号测点,其中15号测点的误差为最大的12.44%。经过分析,造成上述现象的原因如下:(1)这3处测点为堆积型冰盖,冰体内部为冰-空气-冰的多层非连续结构,结构复杂,导致介电常数与真实情况存在偏差,纯冰的介电常数不再适用,这一问题的解决还需后续的进一步研究;(2)堆积型冰盖冰面不平整,起伏变化大,且有积雪覆盖,L型量冰尺测量的冰厚为开孔位置紧贴水面处的冰厚,而雷达测量时的位置稍有偏差就会导致冰厚误差较大。
总体来看,冰水情一体化双频雷达测量系统原型对比测量中,水深测量的平均误差为3.97%;覆雪条件下冰厚测量的平均误差为4.32%,且大部分测点误差控制在5%以内,具有较高的测量精度,能够满足防冰减灾的实际需要。

图8 水深测量结果对比
4 原型观测实例

图9 冰厚测量结果对比
采用冰水情一体化双频雷达测量系统在经常发生冰坝灾害的黑龙江漠河县龙岛码头河段开展了冰水情原型观测,观测河段长约535 m。由于采用了RTK系统实时采集GPS坐标,因此测量结果可与GIS系统无缝融合,具体的测量线路如图10所示。测量结果(图11)表明:码头上游的冰厚在0.9~1.0 m之间,水深在3.0 m左右;码头下游的冰厚在0.8~0.9 m之间,水深则增加到6.0 m。

图10 测量路线的卫星图像
上述测量结果也解释了龙岛码头经常发生冰坝的原因:(1)龙岛码头河段为弯道,冰块流动时的阻力较大;(2)从上游到下游,河床高程大幅降低,水深由3.0 m迅速增大到6.0 m,这意味着流速突然放缓,进一步导致上游来冰在龙岛码头处的挤推和堆积,易于导致冰坝的形成。龙岛码头河段上、下游的冰面情况(参见图12),也可以进一步验证上述解释:上游河段的冰面极不平整,属于立封,而下游的冰面非常平整,属于平封。

图11 龙岛码头河段冰厚和水深的测量结果(从上游到下游)

图12 龙岛码头河段的冰塞堆积
以上述测量数据为基础,2015年和2016年分别在开河前对黑龙江龙岛码头河段的冰塞中部和下游分别开展了防凌爆破(参见图13),炸药根据参考文献[23]提出的方法埋设,爆破后龙岛码头河段开河期间冰块流动顺畅,未发生往年经常出现的冰块堆积和冰坝灾害。因此,通过冰水情一体化双频雷达系统,可以高效地获取冰灾易发河段冰水情参数的连续数据,更清楚地认识冰塞、冰坝发生的原因和本质,进而采取恰当的冰害预防和应对措施。

图13 黑龙江龙岛码头河段开河前的防凌爆破
5 结论
利用冰、水、淤泥等不同的介电常数,耦合RTK系统的冰水情一体化双频雷达可用于冬季河流冰水情的原型观测,且能够克服目前单频雷达在冰水情测量中的缺点,提高野外原型观测的效率,并与GIS系统无缝融合,提高冰灾险情的预测和应对技术。100 MHz和1 500 MHz两种频率的雷达可分别用于水深和冰厚的测量,在黑龙江漠河段与L型量冰尺和水位压力传感器原型对比结果表明:双频雷达水深测量的平均误差为3.97%;覆雪条件下冰厚测量的平均误差为4.32%。对于堆积型冰盖,由于冰体内部为冰-空气-冰的多层非连续结构,其介电常数变化特性和雷达回波图像识别技术目前尚不成熟,因此在雷达测量精度上稍差,还需开展进一步的研究。
参 考 文 献:
[1] HEIL P.Atmospheric conditions and fast ice at Davis,East Antarctica:a case study[J].Journal of Geophysical Research Oceans,2006,111(C5):101-112.
[2] 付辉,杨开林,王涛,等.河冰水力学研究进展[J].南水北调与水利科技,2010(1):14-18.
[3] 李志军,韩明,秦建敏,等.冰厚变化的现场监测现状和研究进展[J].水科学进展,2005,16(5):753-757.
[4] 黄文峰,李志军,贾青,等.水库冰表层形变的现场观测与分析[J].水利学报,2016,47(12):1585-1592.
[5] 崔丽琴,秦建敏,张瑞锋.基于空气、冰和水电阻特性差异进行河冰冰厚检测方法的研究[J].太原理工大学学报,2013,44(1):5-8,13.
[6] MARKO J R,JASEK M.Acoustic Detection and Study of Frazil Ice in a Freezing River during the 2004-2005 and 2005-2006 Winters[C]//19th IAHR International Symposium on Ice.Vancouver,British Columbia,Canada,2008.
[7] MARKO J R,JASEK M.Sonar detection and measurements of ice in a freezing river I:methods and data charac⁃teristics[J].Cold Regions Science and Technology,2010,63(3):121-134.
[8] MARKO J R,JASEK M.Sonar detection and measurement of ice in a freezing river II:observations and results on frazil ice[J].Cold Regions Science and Technology,2010,63(3):135-153.
[9]MORSE B,RICHARD M.A Field study of suspended frazil ice particles[J].Cold Regions Science and Technolo⁃gy,2009,55(1):86-102.
[10] GHOBRIAL T R,LOEWEN M R,Hicks F E.Characterizing suspended frazil ice in rivers using upward looking sonars[J].Cold Regions Science and Technology,2012,86(2):113-126.
[11] GHOBRIAL T R,LOEWEN M R,Hicks F E.Continuous monitoring of river surface ice during freeze-up using upward looking sonar[J].Cold Regions Science and Technology,2013,86(2):69-85.
[12] HELFRICH S R,MCNAMARA D,RAMSAY B H,et al.Enhancements to,and forthcoming developments in the Interactive Multisensor Snow and Ice Mapping System(IMS)[J].Hydrological Processes,2007,21(12):1576-1586.
[13]HALL D K,RIGGS G A,SALOMONSON V V,et al.MODIS snow-cover products[J].Remote Sensing of Envi⁃ronment,2002,83(1/2):181-194.
[14] ARCONE S A,DELANEY A J.Airborne river-ice thickness profiling with helicopter-borne UHF short-pulse ra⁃dar[J].Journal of Glaciology,1987,33(115):330-340.
[15] ARCONE S A.Dielectric constant and layer-thickness interpretation of helicopter-borne short-pulse radar wave⁃forms reflected from wet and dry river-ice sheets[J].IEEE Transactions on Geoscience&Remote Sensing,1991,29(5):768-777.
[16] GALLEY R J,TRACHTENBERG M,LANGLOIS A,et al.Observations of geophysical and dielectric properties and ground penetrating radar signatures for discrimination of snow,sea ice and freshwater ice thickness[J].Cold Regions Science and Technology,2009,57(1):29-38.
[17] FINLAY P I,PARRY N S,PROSKIN S A.An Overview of Ice and Bathymetric Profiling using Ground Penetrat⁃ing Radar(GPR)[C]//19th IAHR International Symposium on Ice.Vancouver,British Columbia,Canada,2008.
[18] PROSKIN S A,PARRY N S,FINLAY P.Applying GPR in Assessing the Ice Bridges,Ice Roads and Ice Plat⁃forms[C]//16th Workshop on River Ice.Winnipeg,Manitoba,2011.
[19] HOLT B,KANAGARATNAM P,GOGINENI S P,et al.Sea ice thickness measurements by ultrawideband pene⁃trating radar:first results[J].Cold Regions Science&Technology,2009,55(1):33-46.
[20] 张宝森,张防修,刘滋洋,等.黄河河道冰层雷达波特征图谱的现场实验研究[J].南水北调与水利科技,2017,15(1):121-125.
[21] DAVIS J L,ANNAN A P.Ground-penetrating radar for high-resolution mapping of soil and rock stratigraphy[J].Geophysical Prospecting,1989,37(5):531-551.
[22] 阴法章,李桂芬,王春雷,等.黑龙江冰坝研究综述[J].黑龙江水专学报,2007,34(2):23-26.
[23] 刘之平,王涛,郭新蕾,等.黑龙江防凌爆破试验研究[J].水利学报,2017,48(3):253-260.
猜你喜欢
科技研究·理论版(2021年20期)2021-04-20 01:42:52
雷达学报(2021年1期)2021-03-04 13:46:10
中国水利(2020年23期)2020-12-24 06:24:40
饮食保健(2019年18期)2019-09-20 08:03:30
通信电源技术(2018年3期)2018-06-26 08:07:02
东坡赤壁诗词(2018年2期)2018-05-10 11:08:24
水利科技与经济(2016年5期)2016-04-22 03:43:10
小学生·多元智能大王(2015年6期)2015-07-10 11:39:02
珠江水运(2015年3期)2015-05-08 15:29:37
河南科技(2014年5期)2014-02-27 14:08:21