基于ADS-B的高精度站间同步方法*
2017-04-26 11:09崔鹏泉唐小明
电讯技术 2017年4期
崔鹏泉,张 涛,唐小明
(海军航空工程学院 电子信息工程系,山东 烟台 264000)
基于ADS-B的高精度站间同步方法*
崔鹏泉*,张 涛,唐小明
(海军航空工程学院 电子信息工程系,山东 烟台 264000)
自动相关监视(ADS-B)可用于多站定位系统中实现时间同步,但直接同步的精度不足以满足工程应用的需要。为了提高同步精度,首先推导了利用ADS-B实现站间同步的机理模型,在实测数据的基础上仿真了直接同步方法的精度水平;其次分析了ADS-B位置误差的类型和来源,得到了不同误差类型的分布特征;最后根据不同误差类型的特点,提出了一种降低ADS-B误差影响的高精度多站同步的方法。该方法可有效降低ADS-B系统延时误差和定位误差对同步精度的影响,以实测数据为基础的仿真结果表明该方法可实现纳秒级的站间同步精度,具有良好的工程应用价值。
广域多站定位;时间同步;广播式自动相关监视;位置误差;航迹间距
1 引 言
在军事和民用领域中,基于到达时间差(Time Difference of Arrival,TDOA)的定位方法以其精度高、覆盖范围广、组网简单方便、抗干扰能力强等诸多优点成为一种重要的多站定位(Multilateration,MLAT)方式。尤其是以对民航飞机为定位目标的多站定位系统在欧美等发达国家已开始研究和应用,其作为过渡到广播式自动相关监视(Automatic Dependent Surveillance-Broadcast,ADS-B)以及提高安全性的备份监视技术势必得到大规模的推广[1-4]。
对于基于TDOA的多站定位系统来说,主要有集中式和分布式两类测量TDOA的方法[5-6]。分布式相对于集中式处理法具有成本低、实现容易且应用环境广阔等优点,但其需要精确的站间同步以保障整个系统稳定有效运行[7]。
基于全球定位系统(Global Positioning System,GPS)共视的同步精度在几十纳秒[8],精度低且受制于人。通过架设一个已知位置的固定发射站进行站间同步不失为一种方法[9],但在广域多站系统中容易出现同步信号遮挡的问题,而在军事应用中失去了无源定位隐蔽性的特点。文献[10]提出通过冗余的TDOA量测来进行站间同步,同步的精度和站点的数量密切相关,这势必会增加布站的数量且同步的精度也比较有限。文献[11]通过站间双向通信可实现较高的同步精度,但增加了系统复杂度且无法用于站间存在视距遮挡的情况。
本文借鉴通过固定发射站进行站间同步的思路,考虑利用已知位置的民航飞机作为同步发射站实现站间同步。目前绝大多数的商用飞机都安装有ADS-B系统,以2 Hz左右的速率主动播报自身的位置、速度等信息[12],而且得益于全球航空运输业的发展,飞机在天空中十分密集[13]。
ADS-B位置存在误差,包括定位误差、数据链误差及系统延时误差[14],其对同步精度的影响如何、是否可以直接用于站间同步等问题将在本文中进行分析,并寻求提高同步精度的方法。
2 同步原理及精度分析
2.1 同步原理及精度的理论分析
通过接收ADS-B信号,可以得到飞机(辐射源)所处的位置。由于信号传播的时间很短,飞机移动的距离仅为厘米量级,故可将其当作静止系统进行分析。
首先描述利用ADS-B进行站间同步的原理。假设飞机在T时刻发射了一条ADS-B位置报文,此时飞机的位置为P(x,y,z),各接收站接收到该条报文的时间为tsi,i=0,1,…,Ns,接收站的位置为Si(xi,yi,zi),i=0,1,…,Ns,如图1所示。
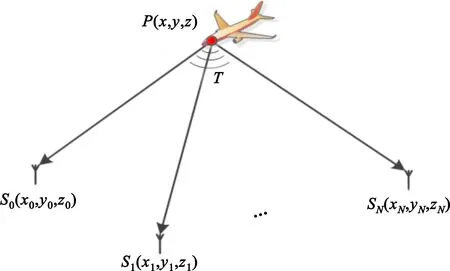
图1 辐射源与接收站的时空关系
根据图1可得

(1)
式中:ΔTi为第i个接收站的时钟与UTC时间之差,Vc为光速。对于基于TDOA的多站定位系统来说只需要将系统时间同步到同一个基准即可,并不一定要同步到UTC时间,所以本文选择同步到中心站S0。各站与中心站的时间基准之差为
ΔTi-ΔT0=tsi-ts0+(r0-ri)/Vc,i=1,2,…,Ns。
(2)
式中右边的都是已知量,所以在计算时差时修正掉各站与中心站的时间基准差即完成站间同步。
接下来分析ADS-B位置存在误差情况下的同步精度,即时间差测量所能达到的精度
Δti=tsi-ts0=(ri-r0)/Vc+(ΔTi-ΔT0),i=1,2,…,Ns。
(3)
假设飞机的ADS-B位置误差为dx、dy、dz,各站站址误差及其误差分量dxi、dyi、dzi之间不相关,根据误差传递原理,对式(3)左右两边求微分得

(4)

dΔT=CdX+dXs。
(5)
假设多站定位系统有4个接收站,那么
dΔT=[dΔt1,dΔt2,dΔt3]Τ,
dX=[dx,dy,dz]Τ,
dXs=[k0-k1,k0-k2,k0-k3]Τ,
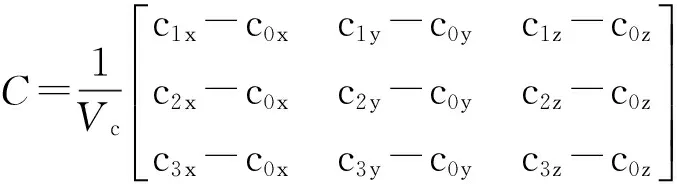
(6)
由于ADS-B的位置误差和站址测量误差是不相关的,且站址测量误差各元素之间以及各站测量误差之间也是互不相关的,所以站间同步的协方差为

(7)

CE[dXdXΤ]CΤ=[ζi,j]3×3,

假设站址测量误差各分量的标准差是相同的,则有

(8)


(9)
各站与中心站之间的同步误差的方差为PdΔT(i,i),分别为
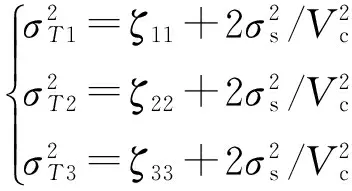
(10)
2.2 仿真分析
ADS-B位置报文包含了该条报文的位置误差信息,采用导航完整性等级(Navigation Integrity Category,NIC)来表示水平位置的完好性和精度[15],如表1所示。表中,RC为水平保护半径;EPU为估计位置不确定度(Estimation Position Uncertainty),对应于95%情况下所能达到的水平位置精度。对于NIC小于6的数据,由于其位置误差较大,且现实中较少存在,本文不予以讨论,故未列出。
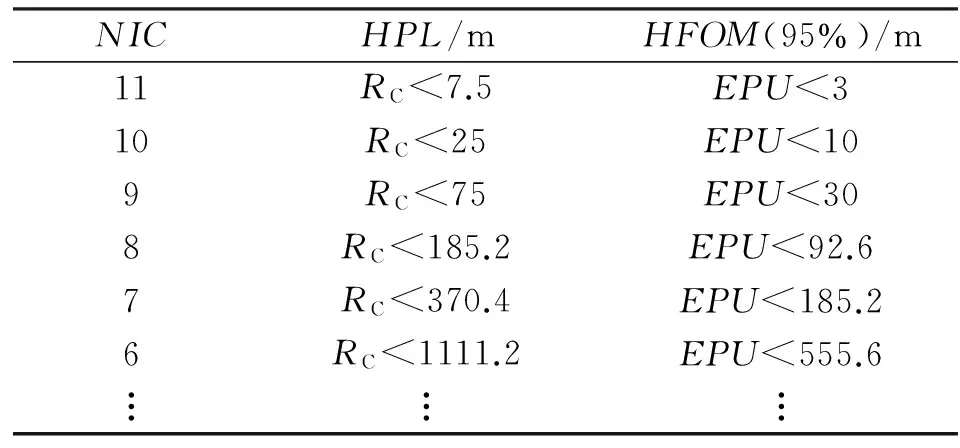
表1 位置导航完整性等级
为了得到在实际环境中ADS-B位置误差等级的分布情况,在绍兴架设了ADS-B接收站以覆盖繁忙的长三角地区进行数据统计。总共采集了近20万批次数据,按照NIC值对数据进行统计,ADS-B数据完好性及精度分布情况如图2所示。
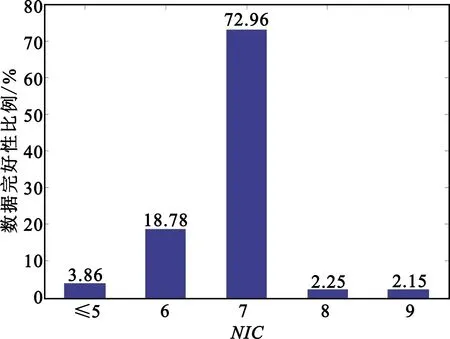
图2 ADS-B数据完好性及精度分布
从统计的结果来看,目前大多数飞机的ADS-B数据完好性及精度等级为7,即在水平方向上,飞机的真实位置和机载导航设备估计的位置之差有95%的概率小于185.2 m。假设ADS-B水平位置误差服从零均值高斯分布,那么落在±1.96σ内的概率正好为95%,所以有

(11)
另设

(12)
可得NIC=7的飞机的各个方向上的标准差为66.8 m。下面分析NIC=7的ADS-B位置信号在飞机处于不同位置时的站间同步精度。
建立仿真条件:星形布站,站间距15 km,主站和各辅站的位置(单位km)具体为(0,0,0)、(-12.99,7.5,-0.1)、(12.99,7.5,-0.2)、(0,-15,-0.3);ADS-B位置误差σp=66.8 m;站址测量误差(以美军军用GPS为参考)为0.5 m;飞机高度为9 km(航线高度)。
接收站1和中心站的时间同步精度分布图如图3所示,最小值为2.4 ns,最大值为369.3 ns。
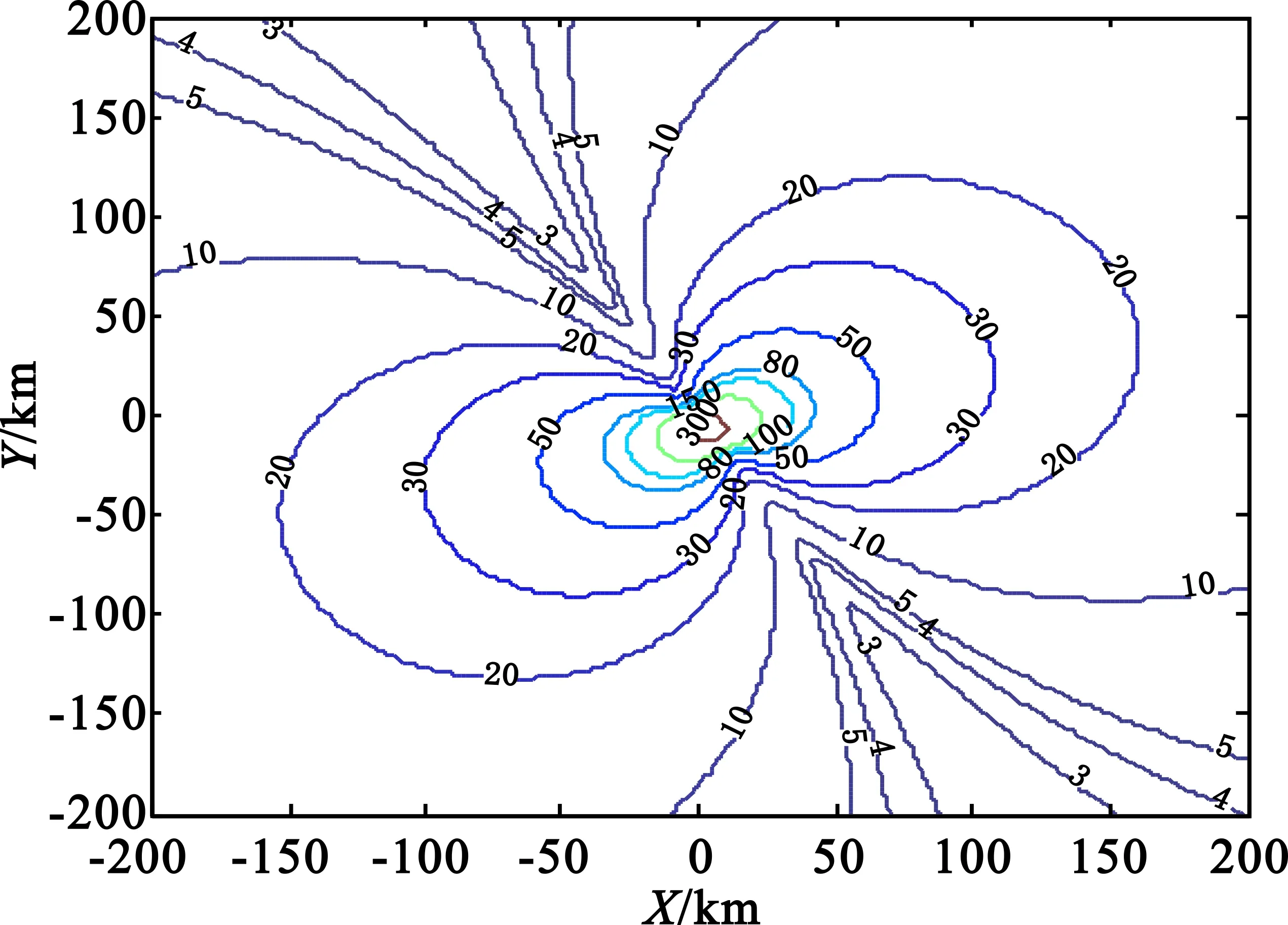
图3 站1与中心站的同步精度分布
为了简洁起见,在此不列出其他接收站与中心站同步精度的分布图,亦不列出在其他布站形式下的分布图,仅给出共同的结论:在两站连线的方向上的同步精度较高;距离越远同步精度越高;飞机在顶空时的同步精度最低;飞机在不同位置对同步精度影响较大。
可以看出,直接利用ADS-B进行站间同步的精度有限,且不同位置的信号进行同步的结果差别较大,难以满足多站定位中对时间同步精度的需求。
在上面的分析中皆是假设ADS-B位置误差为高斯分布,但实际上ADS-B具有不同的位置误差类型,不能将其统一按照高斯分布进行处理,需要根据误差来源分析其类型,并寻求提高同步精度的方法。
3 ADS-B误差分析
3.1 ADS-B误差来源
ADS-B位置误差是指ADS-B位置报文中的位置与发射该条位置报文时飞机所处的真实位置之间的差别。ADS-B位置误差由三部分组成,即定位误差、数据链误差和系统延时误差。
定位误差来自于机载导航设备,不同的导航设备的定位误差等级有所差别。数据链误差来源于对位置进行编码的分辨率,空中位置消息中经纬度编码的精度为5 m左右,高度编码的精度约为7.62 m。在通常的误差分析中,该项误差由于影响较小且呈均值为零的均匀分布,故常不进行考虑。系统延时误差是ADS-B位置误差中最主要的误差,它是指ADS-B报文中位置对应的真实时间到该报文被发射的时间中没有被补偿的部分。由于系统延时导致的误差难以测量且不具有零均值特性成为误差分析中的重点[16]。在国际民航组织针对ADS-B系统提出的最低性能标准《DO-260B》的附件U中,明确阐述了ADS-B系统从定位测量到信号发射的过程,在此不作详细描述。系统延时误差的范围为-200~400 ms[12]。这即是说在具有补偿机制的情况下,飞机发射时刻所处的位置和报文中的位置存在最大0.4 V的距离差(飞机速度为250 m/s时,距离差为100 m)。而在没有补偿机制的情况下,该距离差会更大。系统延时对一架飞机来说相对固定,而对不同飞机来说各不相同[14]。由该项误差引入的同步误差可达百纳秒量级,且不能通过多次同步求平均来予以消除,故直接用ADS-B位置信息进行站间同步是不行的。
3.2 实测数据随机误差分析
从3.1节中我们知道ADS-B位置误差主要分为由系统延时引起的固定误差以及定位精度、CPR编码引入的随机误差。固定误差取决于机载设备本身的特性尚不能仅依靠ADS-B数据进行分析,随机误差则可以通过建模来等效分析。

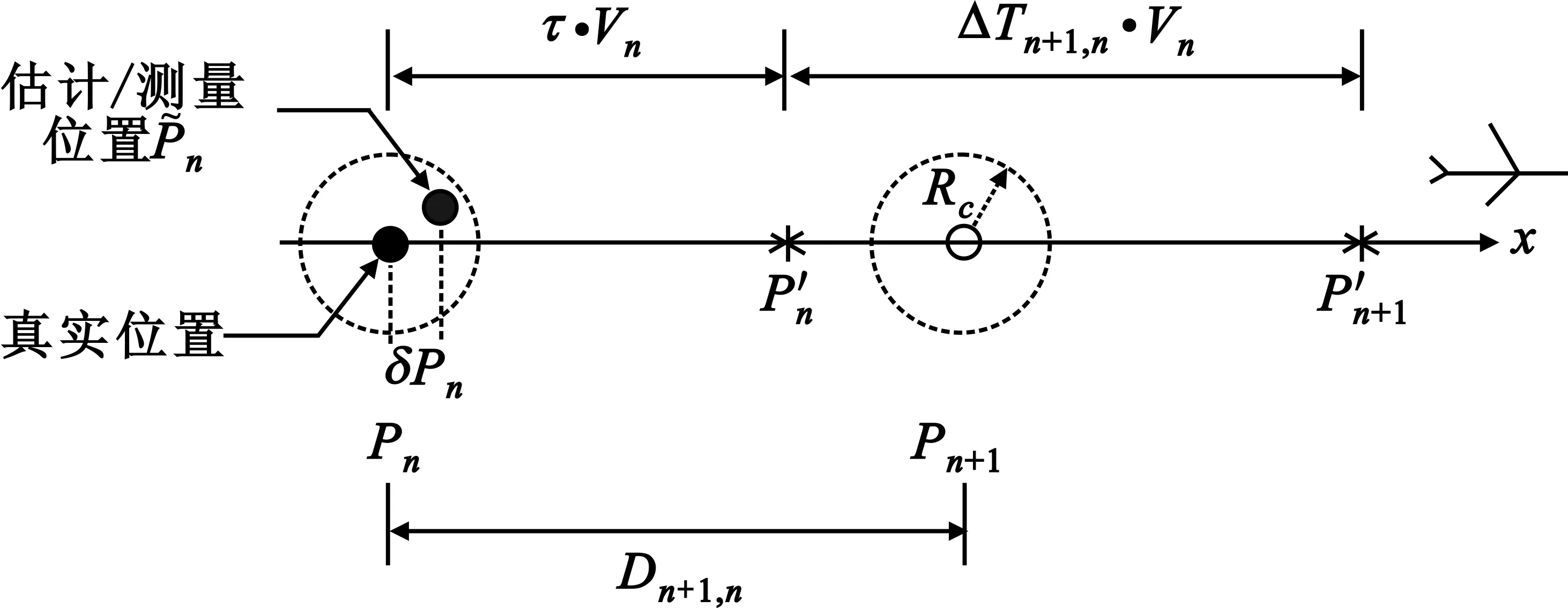
图4 ADS-B中各位置的关系
由于将在航线上飞行的飞机看着是作匀速直线运动,所以Vn≈Vn+1,δPn为Tn时刻所发报文位置随机误差在飞行航线上的投影,所以有
Dn+1,n-ΔTn+1,n·Vn=δPn+1-δPn。
(13)
我们可以通过评估定位误差投影在航线上的二次差δPn+1,n=δPn+1-δPn来反映ADS-B位置的随机误差。
由于ΔTn+1,n是一个在0.4~0.6 s内的一个随机值,所以对等式左边的结果作归一化处理,即等效随机误差EVn=(Dn+1,n-ΔTn+1,n·Vn)/ΔTn+1,n。对某架装有ADS-B系统的飞机进行连续监视,得到N+1个位置报文,根据上述步骤,可得向量[EV1,EV2,…,EVN],将此向量看作是对一个服从正态分布的变量的采样,并对其作概率分布拟合,可得到均值和标准差两个参数,可在较大程度上反映ADS-B位置的随机误差。从实测数据中的不同NIC等级下各挑选了一个批次数据作如上处理,得到的结果如表2所示。
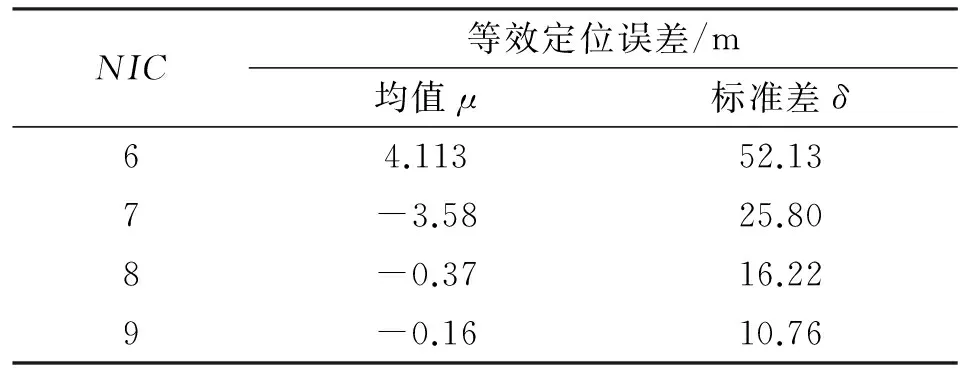
表2 不同NIC下的等效随机误差

对于系统延时误差,文献[14]利用高精度雷达数据和ADS-B数据联合处理,估计出了ADS-B的系统延时误差。该文献中给出的实测数据实例表明,该飞机的ADS-B系统延时误差将引入300 m左右的距离(沿航线)误差,若利用该飞机作同步将引入1 000 ns左右的同步误差。
所以,利用ADS-B位置信号对广域多站进行时间同步时,首先应尽可能地选择NIC等级高的飞机,其次用于同步的位置数据应尽量位于同步精度较高的区域,最后同步方法应能有效消除系统延时误差带来的影响。
4 高精度站间同步方法
4.1 基于ADS-B的高精度站间同步方法
ADS-B系统延时误差一般较为固定且难以测量,其对时间同步的影响比定位误差更大,所以高精度多站同步方法必须能够有效消除系统延时误差带来的影响。
我们知道,对于一段用于同步的航迹数据,如果ADS-B系统延时误差对两站之间的时间同步影响为正(影响程度未知),那么当同一架飞机(系统延时误差不变)逆向飞过该航段时,系统延时误差对同步的影响将为等量的负值,同时运用这两段航迹数据对两个站进行同步便可有效消除系统延时误差带来的影响。
假设:


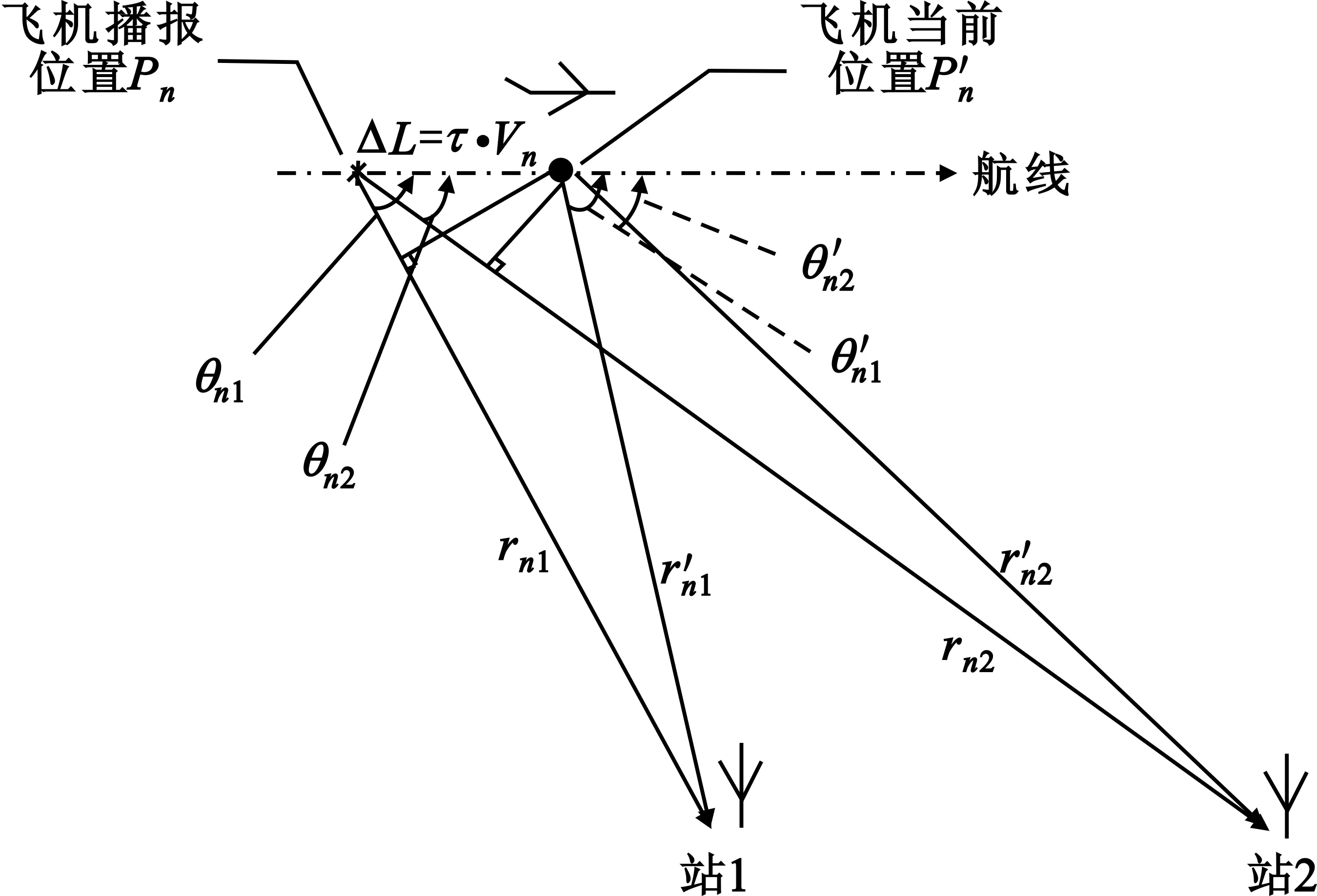
图5 双站同步示意图

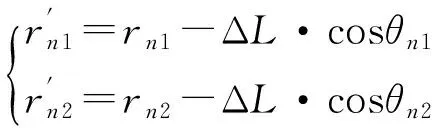
(14)
将式(14)代人到式(2)可得
ΔT1,2(n)=tn1-tn2+…(rn2-rn1+ΔL·(cosθn1-cosθn2))/C。
(15)


当所有接收站皆可对某一架飞机形成共视时,可同时将各辅站同步到中心站。若只有部分站实现共视,那么待同步辅站可按上述方法逐一与主站同步,最终完成多站时间同步。
4.2 同步精度分析
为了全面分析在不同的ADS-B航迹数据下,多站同步的精度,在这里采用16条仿真的航迹,但ADS-B航迹数据的定位误差和系统延时误差参数均来自实测数据。16条仿真航迹如图6所示,以站1为中心站,有8条径向飞行的航迹(考虑到过顶飞行存在接收盲区)和8条切向飞行的航迹。为了保证航迹数据有较高的质量以及多站可以对航迹形成共视,所有航迹都位于以站1为中心、半径为80km的区域内。
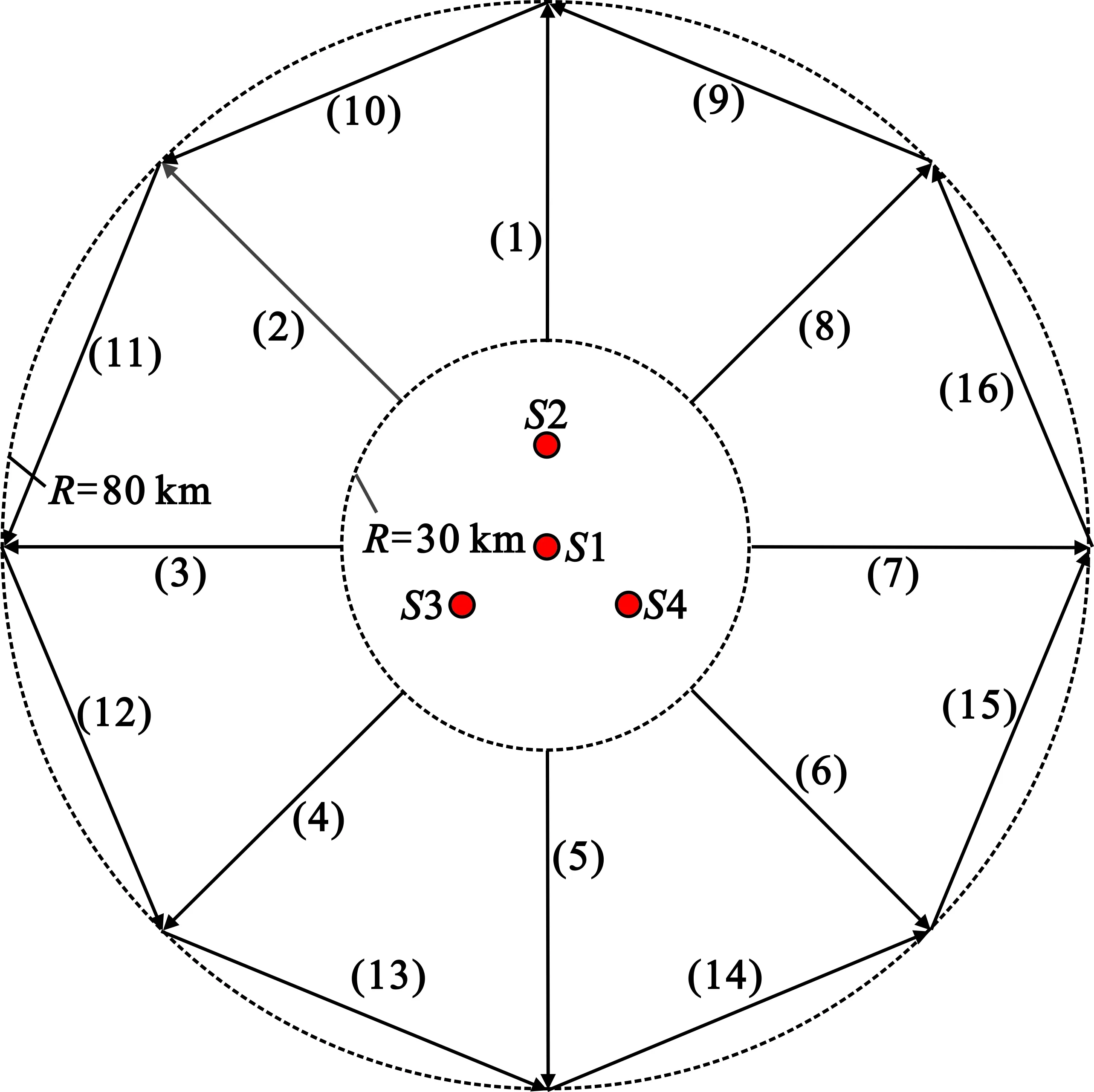
图6 航迹分布图(星形布站)
仿真条件:星形布站,4站坐标S1(0,0.2,0)、S2(0,15,0)、S3(-12.99,-7.5,0)、S4(12.99,-7.5,0),单位km;航迹高度8.8 km,飞机对地速度250 m/s(飞机航线飞行的典型值);ADS-B水平定位误差分布模型为正态分布,其均值(单位m)和标准差为(0,277.8)(NIC=6)、(0,92.6)(NIC=7)、(0,46.3)(NIC=8)、(0,15)(NIC=9),高度误差7.62 m(均匀分布),系统延时误差为0.4 s;各站测时精度为5 ns[16]。
以NIC=7的ADS-B航迹数据(实测比例超过70%)为例,在1 000次蒙特卡洛仿真条件下,同步精度如图7所示。
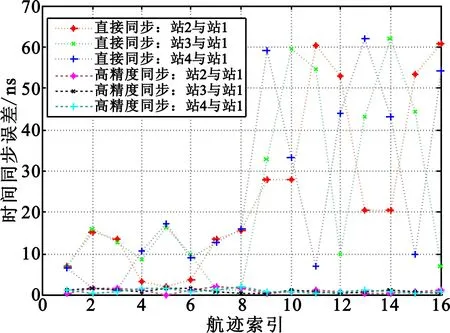
图7 基于ADS-B的多站同步精度(NIC=7)
直接利用ADS-B数据进行多站同步的误差远高于4.1节中所述的高精度同步方法的误差,且不同航迹数据的同步效果也存在较大差异(有的超过60 ns的同步误差)。在直接同步情况下,总的来说径向航迹的同步效果要好于切向航迹,但对于高精度同步方法来说两者区别不大。下面仅在高精度同步方法下进行分析。
不同精度等级的航迹数据对站2和站1之间的同步精度如图8所示。显而易见,精度等级越高的航迹数据对多站的同步精度越好。对NIC为8、9的航迹数据来说,时间同步误差在1 ns以内,较文献[16]中5 ns以内的高精度测时误差要高出不少,基本可以忽略。对于最为普遍的NIC=7的航迹数据来说,同步误差也小于2 ns。
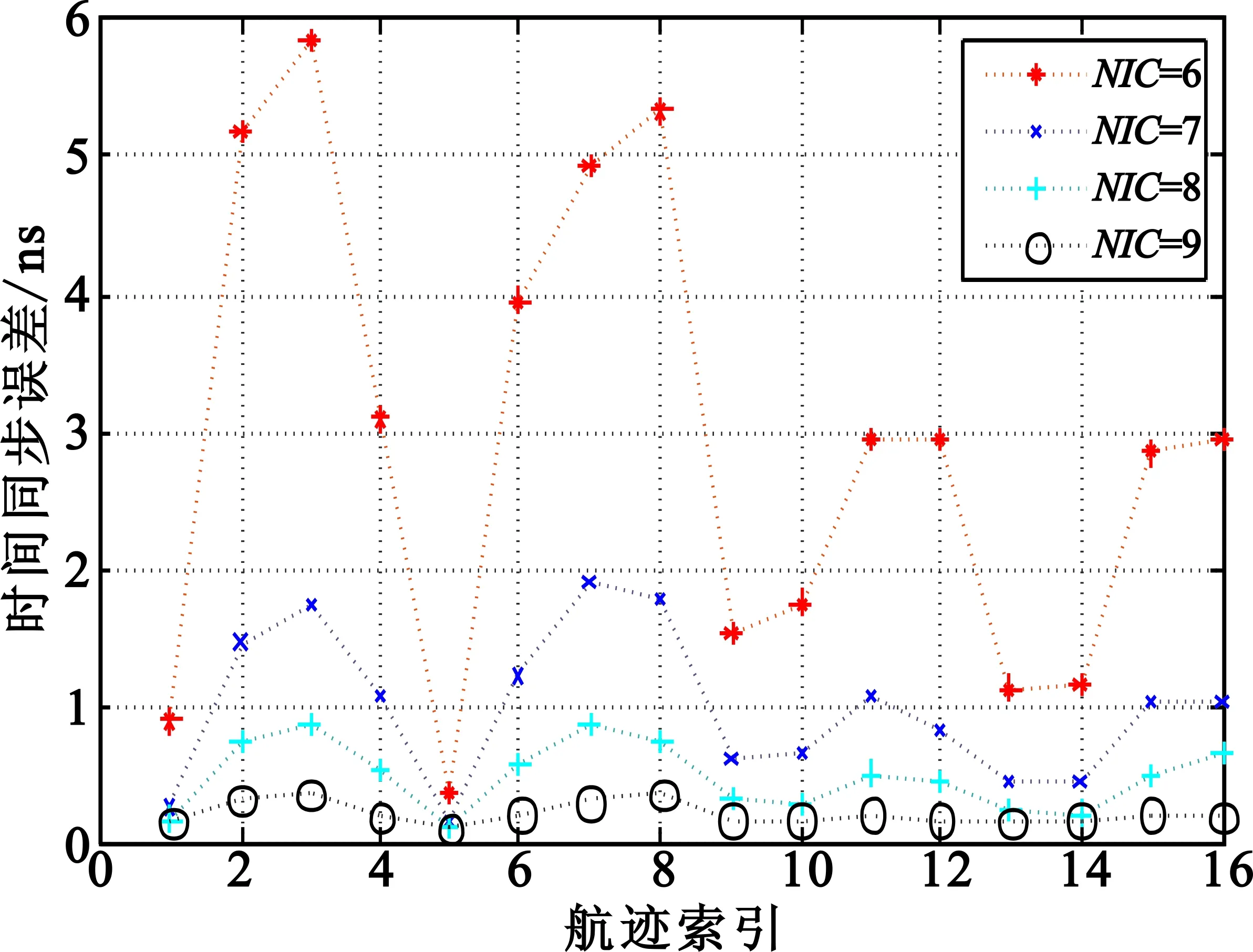
图8 不同精度等级航迹数据的多站同步精度
考虑到ADS-B一般采用双天线(机头上方和机尾下方)交替发射的方式,通过仿真发现该机制对高精度同步方法来说几乎没有影响。但在实际情况下还应考虑到另一个重要的因素,那就是飞机在同一航线上飞去和飞回,其航迹并不完全重合,而是可能存在几公里左右的水平间距和百米量级的高度差。所以将此因素考虑在内,对星形布站形式下的同步精度(站2与站1)进行分析。仿真条件:飞机一来一回的航迹间距为3 km,高度差600 m。仿真结果如图9所示,可见由于飞机一来一回的航迹并不十分重合,将会引入同步误差。这种航迹不重合度对部分航迹影响稍大,但对某些航迹几乎没有影响,如5号航迹。所以,在进行多站时间同步时需要先对可用航迹进行优选,以达到最佳的同步效果。对其他形式布站得到的结果类似,在此不展开叙述。
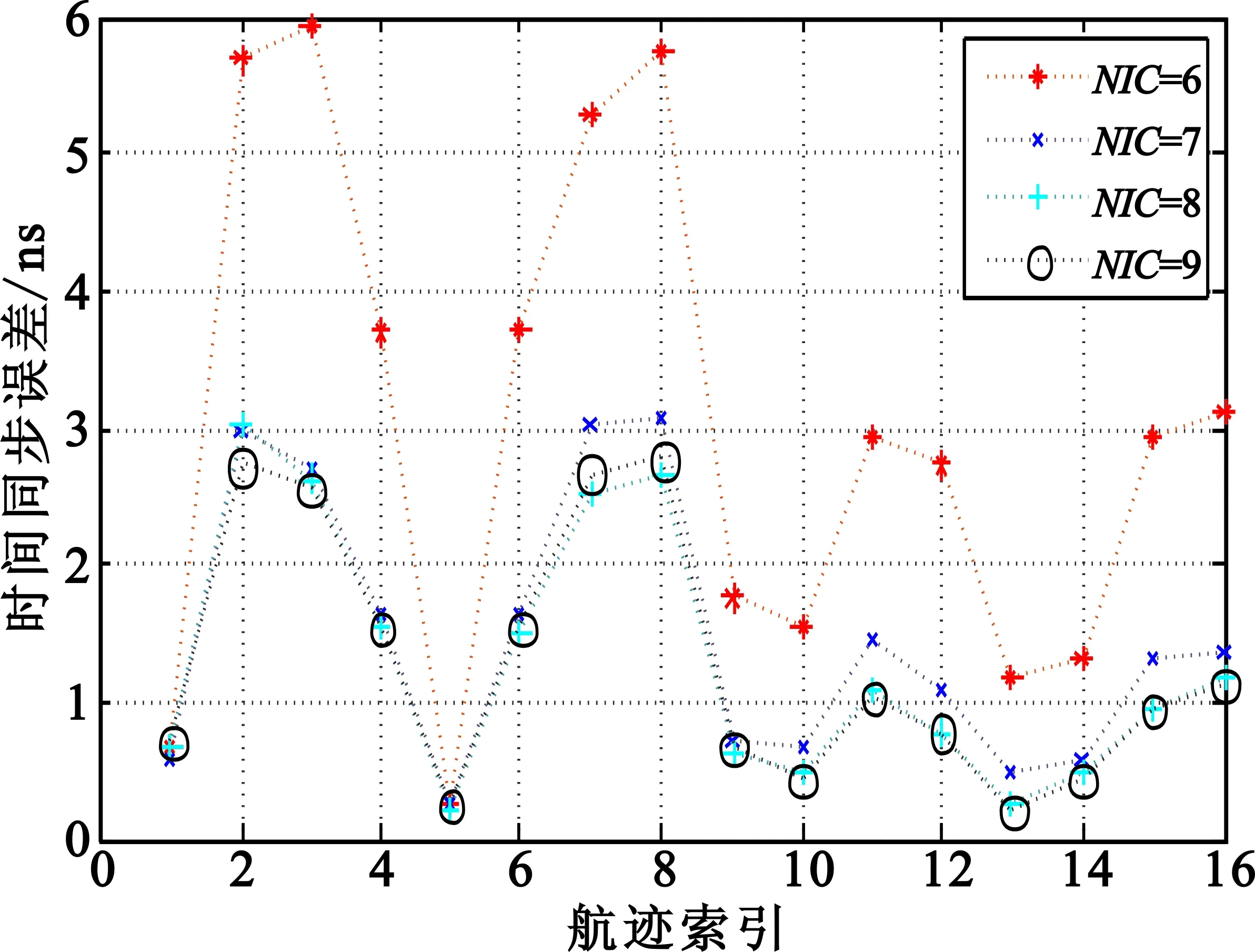
图9 考虑双天线时多站时间同步精度
不同的航迹间隔(水平)对多站时间同步(站2与站1)的影响如图10所示。总体来说航迹间隔大的同步误差较大,由于航迹间隔带来的误差一般不超过2 ns,但对部分航迹(航迹在两个站的连线上,如1、5号航迹)几乎没有影响。
图10 不同航迹间隔下的多站时间同步精度(星形布站,NIC=7)
来回航迹的不同高度差对多站时间同步(站2与站1)的影响如图11所示。可以看出,高度差对同步误差没有多大影响,这是由于飞机距离接收站一般都在几十公里的量级以上,高度维上的误差在飞机与接收站的斜距上的投影非常小,对电磁波的传送延时的贡献非常之小,所以除了距离接收站较近的航线数据,基本可以忽略其影响。
图11 不同高度差下的多站时间同步精度(星形布站,NIC=7)
5 结束语
本文通过对基于ADS-B的高精度多站时间同步方法的分析及仿真验证,结果表明:
(1)直接利用ADS-B数据进行站间同步的精度难以满足多站定位的需要,本文的同步方法有效降低了ADS-B系统延时误差和定位误差对同步精度的影响,同步精度可达纳秒级;
(2)在一定布站形式下,航迹的位置和ADS-B数据的精度等级对同步精度有影响,航迹的位置对同步精度的影响较大,建议选择合适的航迹数据,在有条件的情况下选择精度等级较高的数据。
本文的研究尚未用实测的数据来验证广域多站间的时间同步精度,下一步在有条件时对其进行实测验证;同时,对不规则航迹的分割、优选方法还需进一步研究。
[1] REKKAS C. ADS-B and WAM deployment in Europe[C]//Proceedings of 2011 Tyrrhenian International Workshop on Digital Communications-Enhanced Surveillance of Aircraft and Vehicles(TIWDC/ESAV). Capri:IEEE,2011:35-40.
[2] REKKAS C. Status of WAM,ADS-B out and ATSAW deployment in Europe[C]//Proceedings of 2014 Tyrrhenian International Workshop on Digital Communications-Enhanced Surveillance of Aircraft and Vehicles(TIWDC/ESAV). Roma,Italy:IEEE,2014:1-5.
[3] WU R H. Alternative terminal navigation based on modified airport multilateration system[C]//Proceedings of 2012 IEEE/AIAA 31st Digital Avionics Systems Conference(DASC). Williamsburg,Virginia,USA:IEEE,2012:1-13.
[4] GARCIA M A,MUELLER R,INNIS E,et al. An enhanced altitude correction technique for improvement of WAM position accuracy[C]//Proceedings of 2012 Integrated Communications,Navigation and Surveillance Conference(ICNS). Herndon,Virginia,USA:IEEE,2012:1-9.
[5] BEZOUSEK P,KUBECEK V. A 3D passive surveillance system VERA accuracy analysis[C]//Proceedings of 13th International Conference on Microwaves,Radar and Wireless Communications.New York:IEEE,2000:25-28.
[6] KUBECEK V,SVOBODA P. Passive surveillance system for air traffic control[C]//Proceedings of 28th European Microwave Conference.Amsterdam,Netherlands:IEEE,1998:546-551.
[7] GALATI G,LEONARDI M,MAGARP,et al. Wide area surveillance using SSR mode S multilateration:advantages and limitations[C]//Proceedings of 2005 European Radar Conference(EuRAD 2005).Helsinki,Finland:IEEE,2005:225-229.
[8] JIANG C S,LIU C Z,WANG X G. GPS synchronized wide area multilateration system[C]//Proceedings of 2009 International Conference on Communications,Circuits and Systems(ICCCAS 2009).Milpitas,CA:IEEE,2009:457-459.
[9] 唐小明,王贞杰,张涛. 一种解决时间同步和检测时间抖动的方法[J].现代电子技术,2012,35(1):85-87.TANG Xiaoming,WANG Zhenjie,ZHANG Tao. Asolution to time synchronization and time jitter detection[J].Modern Electronics Technique,2013,35(1):85-87.(in Chinese)
[10] PELANT M,STJSKAL V. Multilateration system time synchronization via over-determination of TDOA measurements[C]//Proceedings of 2011 Tyrrhenian International Workshop on Digital Communications Enhanced Surveillance of Aircraft and Vehicles(TIWDC/ESAV).New York:IEEE,2011:179-183.
[11] 刘晓健,李名祺. 机动定位平台间时间同步系统的误差分析与控制[J].电讯技术,2014,54(12):1694-1699. LIU Xiaojian,LI Mingqi. Accuracy analysis and improvement of time synchronization technique for mobile locating systems[J].Telecommunication Engineering,2014,54(12):1694-1699.(in Chinese)
[12] RTCA. Minimum operational performance standards for 1090MHz extended squitter automatic dependent surveillance-broadcast(ADS-B) and traffic information services-broadcast(TIS-B)[S].Washington,DC:RTCA,Inc.,2011:50-85.
[13] 张军. 空域监视技术的新进展及应用[J].航空学报,2011,32(1):1-14. ZHANG Jun. New development and application of airspace surveillance technology[J].Acta Aeronautica et Astronautica Sinica,2011,32(1):1-14.(in Chinese)
[14] 张涛,唐小明,金林. ADS-B用于高精度雷达标定的方法研究[J].航空学报,2015,36(12):3937-3946. ZHANG Tao,TANG Xiaoming,JIN Lin. A method of high accuracy radar calibration with ADS-B[J].Acta Aeronautica et Astronautica Sinica,2015,36(12):3937-3946.(in Chinese)
[15] 沈笑云,唐鹏,张思远,等. ADS-B统计数据的位置导航不确定类别质量分析[J].航空学报,2015,36(9):3128-3126. SHEN Xiaoyun,TANG Peng,ZHANG Siyuan,et al. Qualityanalysis of navigation unertain category for position based on ADS-B statistical data[J].Acta Aeronautica et Astronautica Sinica,2015,36(9):3128-3126.(in Chinese)
[16] GALATI G,LEONARDI M,MARCO P D,et al. New time of arrival estimation method for multilateration target location[C]//Proceedings of 2005 Joint International Symposium on Sensors and Systems for Airport Surveillance(JISSA).Paris:IEEE,2005:20-21.

崔鹏泉(1986—) ,男,山东莱州人,海军航空工程学院硕士研究生,主要研究方向为雷达探测技术;
Email:radarads@sina.com
张 涛(1986—) ,男,四川蓬溪人,2016年于海军航空工程学院获博士学位,主要研究方向为信号检测、估计与目标识别、雷达探测技术;
唐小明(1974—) ,男,浙江淳安人,博士,海军航空工程学院电子信息工程系副教授、硕士生导师,主要研究方向为信号检测、估计与目标识别。
A Precise Synchronization Method between Receiving Stations Based on ADS-B
CUI Pengquan,ZHANG Tao,TANG Xiaoming
(Institute of Electronic and Information Engineering,Naval Aeronautical and Astronautical University,Yantai 264000,China)
Automatic dependent surveillance-broadcast(ADS-B) can be used to synchronize time between stations,but not enough to meet the needs of engineering application with the accuracy of direct synchronization.For improving the accuracy of time synchronization,mechanism model of time synchronization between stations with ADS-B is derived,and the synchronization accuracy with direct synchronization method based on measured data is simulated.Then,the distribution features of different error types are obtained by analyzing the type and source of ADS-B position error. Finally,a precise time synchronization method with depressing the influence of ADS-B position error is proposed according to the features of different position error types.The proposed method can effectively reduce the influences of ADS-B system delay time error and location error on synchronization accuracy. The simulation result based on measured data shows that the accuracy of time synchronization with this method can reach nanosecond precision,which is of significant engineering application value.
wide area multilateration(WAM);time synchronization;ADS-B;position error;track spacing
10.3969/j.issn.1001-893x.2017.04.012
崔鹏泉,张涛,唐小明.基于ADS-B的高精度站间同步方法[J].电讯技术,2017,57(4):436-443.[CUI Pengquan,ZHANG Tao,TANG Xiaoming.A precise synchronization method between receiving stations based on ADS-B[J].Telecommunication Engineering,2017,57(4):436-443.]
2016-06-03;
2016-12-23 Received date:2016-06-03;Revised date:2016-12-23
国家自然科学基金资助项目(61032001)
TN953
A
1001-893X(2017)04-0436-08
*通信作者:radarads@sina.com Corresponding author:radarads@sina.com
猜你喜欢
青年歌声(2019年12期)2019-12-17
铁道通信信号(2018年3期)2018-04-19
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
光学精密工程(2016年3期)2016-11-07
铁道通信信号(2016年6期)2016-06-01
铁道通信信号(2016年3期)2016-06-01
测绘科学与工程(2016年6期)2016-04-17
山东冶金(2015年5期)2015-12-10